智能寻轨器A型.
- 格式:ppt
- 大小:4.56 MB
- 文档页数:56
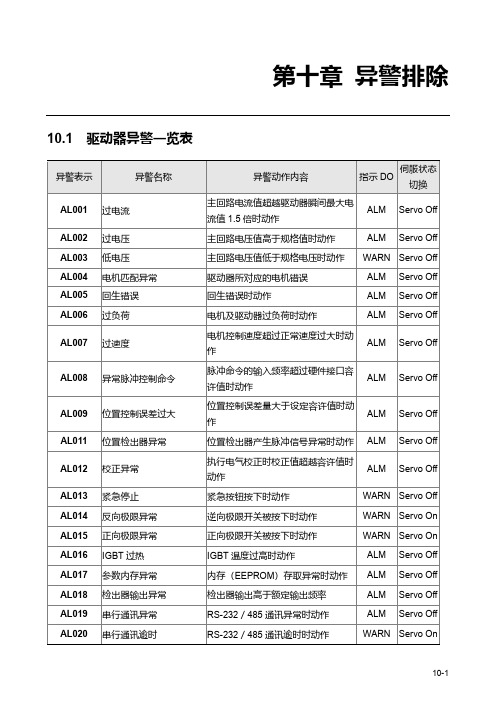
第十章异警排除10.1 驱动器异警一览表第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列10.2 CANopen通讯异警一览表第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列10.3 运动控制异警一览表第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列注:若出现与以上驱动器异警一览表、CANopen通讯讯异警一览表和运动控制异警一览表内不同的异警信息时,请与当地经销商或技术人员联系。
第十章异警排除 ASDA-A2系列10.4 异警原因与处置异警表示AL001:过电流AL002:过电压AL003:低电压AL004:电机匹配错误AL005:回生错误AL006:过负荷AL007:过速度AL008:异常脉冲控制命令AL009:位置控制误差过大AL011:位置检出器异常AL012:校正异常AL013:紧急停止AL014:反向运转极限异常AL015:正向运转极限异常AL016:IGBT过热AL017:内存异常AL018:检出器输出异常AL019:串行通讯异常AL020:串行通讯逾时AL022:主回路电源异常AL023:预先过负载警告AL024:编码器初始磁场错误AL026:编码器内部数据可靠度错误AL027:编码器内部重置错误AL028:编码器高电压错误或编码器内部错误AL029:格雷码错误AL030:电机碰撞错误AL031:电机U, V, W 接线错误侦测AL034:编码器内部通讯异常AL035:编码器温度超过保护上限AL040:全闭环位置控制误差过大AL041:光学尺断线AL042:模拟速度电压输入过高AL044:驱动器功能使用率警告AL045:电子齿轮比设定错误AL060:绝对位置遗失AL061:编码器低电压错误AL062:绝对型位置圈数溢位AL067:编码器温度警告AL068:绝对型数据I/O传输错误AL069:电机型式错误AL06A:未建立绝对型原点坐标AL070:编码器处置未完成警告AL072:编码器过速度AL073:编码器内存错误AL074:编码器single-turn错误AL075:编码器绝对圈数错误AL077:编码器内部错误AL079:编码器参数设置AL07A:编码器Z相位置遗失AL07B:编码器内存忙碌AL07C:转速超过200 rpm时下达清除绝对位置命令AL07D:当出现AL07C后,如果没有解除AL07C重新上电,会停止电机动作AL07E:编码器清除程序错误AL083:电流侦测范围异常AL085:回生异常AL086:输入电压过高AL095:回生电阻断线AL099:DSP韧体升级AL111:CANopen SDO接收溢位AL112:CANopen PDO接收溢位AL121:CANopen PDO存取时,Index错误:CANopen PDO存取时,Sub-Index错误AL123:CANopen PDO存取时,数据Size错误AL124:CANopen PDO存取时,数据范围错误AL125:CANopen PDO对象是只读,不可写入AL126:CANopen PDO对象,不允许PDOAL127:CANopen PDO对象,Servo On时,不允许写入AL128:CANopen PDO对象,由EEPROM读取时错误AL129:CANopen PDO对象,写入EEPROM时错误AL130:CANopen PDO对象,EEPROM的地址超过限制CRC计算错误AL132:CANopen PDO对象,写入密码错误AL170:CANopen Heartbeat或NodeGuarding错误NodeGuarding错误AL186:Bus offAL201:CANopen 数据初始错误AL207:PR命令Type 8来源参数群组超出范围:PR命令Type 8来源参数群组超出范围AL213~ AL217:PR程序写入参数错误AL231:PR命令Type 8来源监视项目超出范围10-31AL235:PR命令溢位10-32AL237:分度坐标未定义AL245:PR定位超时AL249:PR定位超时AL283:软件正向极限10-33AL285:软件负向极限AL289:位置计数器溢位AL291:Servo OFF异常同步失效10-34AL302:CANopen同步信号太快AL303:CANopen同步信号超时AL304:CANopen IP命令失效AL305:SYNC Period错误AL35F:紧急停止(减速过程中)10-35AL380:位置偏移警报AL3CF:紧急停止AL3F1:通讯型绝对位置命令错误10-36AL400:分度坐标错误AL401:Servo On 时收到NMT Reset命令AL404:PR特殊滤波器设定过大AL500:STO功能被启动AL501:STO_A lost (信号遗失或错误)AL502:STO_B lost (信号遗失或错误)10-37AL503:STO_errorAL555:系统故障10-3810.5发生异常后解决异警的方法10-3910-40第十章异警排除 ASDA-A2系列10-41第十章异警排除 ASDA-A2系列10-42。


Technical Assistance (800) 343-1391 1Transmitter/ReceiverCable TracerModel 6681Technical Hotline: (800) 343-1391 Detects and locates faults in electrical cables, telecommunication cables, live and de-energized conductors buriedor in walls• O perates in both single-pole and two-pole modes • L ocates and traces hidden cables • D etects and locates line breaks • D etects faults in floor radiant heating systems • D etects constrictedsections of non-metallic pipes • D etects circuit breakers/fuses • D etects short circuits • B acklight and flashlight functions • C ompliant with standards electrical safety standard EN 61010-1 and electromagnetic compatibility standard EN 61326-1Our products are backed by over 130 years of experience in test and measurement equipment, and encompass the latest international standards for quality and safety.Locate hidden cableswork, the AEMCtelecommunication cables, metal pipes and even restrictions innon-metal conduit.Comprising a transmitter and a receiver, the Model 6681 issimple to use on both current-carrying and non-current-carryingelectrical wiring. Its digital technology overcomes interferenceand disturbance signals to provide precise location details. The Renovation. Improvement. Maintenance.with optimized contrast,bargraph and backlighting Technical Assistance (800) 343-1391Technical Assistance (800) 3A Single Instrument for Locating All Your Metal ConductorsLocation and tracking of branches and outletsLocate line interruptionsTrace buried cable runsIdentification of the networkvoltage and detection of breaks inthe wiringShort circuit detection in walls,flooring or under groundFault detection in radiantheating systems Circuit breaker identificationDetect crimped or obstructed sections of a non-metallic pipeDetection of metal heating ductsand water pipesPRODUCT INCLUDESof two test probes, ground rod, 9V battery, 6 x 1.5V AAA batteries and user manual.CATALOG NO.DESCRIPTION2127.85Cable Locator Model 6681AEMC ® Instruments • 15 Faraday Dr. • Dover, NH 03820 USA • (800) 343-1391•Fax(603)742-2346•E-mail:**************Export Department: +1 (603) 749-6434 x520 • Fax +1(603)742-2346•E-mail:***************© Chauvin Arnoux ®, Inc. d.b.a. AEMC ®Instruments Call the AEMC ® Instruments Technical Assistance Hotline for immediate consultation with an applications engineer: (800) 343-1391950.BR-6681_0223 • Printed in the USA United States & CanadaChauvin Arnoux ®, Inc. d.b.a. AEMC ® Instruments 15 Faraday Drive Dover, NH 03820 USA Tel (603) 749-6434 Fax (603) 742-2346Customer SupportPlace orders, obtain prices and delivery options (800) 343-1391custom erservice@aem Sales & Marketing Department ************** m arketing@aem M u lt i-p u r p o s e C la m p -O n M e t e r s o tl in e: M E G O H MM E T E R SFo r a ll of y ou r I ns ul at io n Te st in g ne ed s...ch ni ca l H o tl in e: (800) 343-1391.a em c.co mP O W E R Q U A L I T Y Fo rA ll Y ou r Po w er Q ua li ty N ee ds ...Te 43-1391w w w ( Fo r a ll of yo ur G ro un d In te gr ity T es tin g ne ed s...G R O U N D R E S IS TA N C E T E S TE R S Te ch ni ca l H ot lin e:(800) 343-1391w w w .a em c.co mTEST & MEA SUREM ENT INSTR UMEN TSVOLUM E 23WWW.AEM TECHNICA L HOTLINE : (800) 343-1391Family of ProductsTo learn more, visit 。

PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号 类型输入电源 型号 电压额定功率额定转速编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105 A 型 单相100V MSMD5AZS1*50W7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107A 型单相100VMSMD011S1*100V100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205A 型单相200VMSMD012S1*100W7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W3000rpm7线制,17位MAMA012P1*5线制,2500p/rMADDT1207A 型单相200VMAMA012S1*200V100W 5000rpm7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110B 型单相100VMSMD021S1*100V 200W7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W3000rpm7线制,17位MAMA022P1*5线制,2500p/rMBDDT2210B 型单相200VMAMA022S1*200V 200W 5000rpm7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120C 型单相100VMSMD041S1*100V 400W7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W3000rpm7线制,17位MAMD042P1*5线制,2500p/rMCDDT3520C 型单相/三相 200VMAMD042S1*200V 400W 5000rpm7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。


mecanum轮式移动机器人轨迹跟踪及编队控制汇报人:日期:•引言•mecanum轮式移动机器人概述目录•轨迹跟踪算法研究•编队控制算法研究•仿真实验与结果分析•结论与展望01引言1 2 3随着移动机器人技术的不断发展,对机器人的轨迹跟踪和编队控制提出了更高的要求。
移动机器人技术Mecanum轮式移动机器人具有全向移动能力,适用于各种复杂环境,因此研究其轨迹跟踪及编队控制具有重要意义。
Mecanum轮式移动机器人本研究成果可应用于物流配送、智能巡检、救援等领域,提高移动机器人的自主导航和协作能力。
实际应用价值研究背景与意义国内外学者在移动机器人轨迹跟踪方面已开展了大量研究,提出了基于PID控制、模糊控制、神经网络控制等多种方法。
轨迹跟踪研究编队控制是移动机器人领域的研究热点,现有方法主要包括领航-跟随法、基于行为法、虚拟结构法等。
编队控制研究未来研究将更加注重多机器人协同编队、动态环境适应性和实时性能提升等方面。
发展趋势国内外研究现状及发展趋势研究内容本研究将围绕Mecanum轮式移动机器人的轨迹跟踪和编队控制展开,具体包括建立机器人运动学模型、设计轨迹跟踪控制器、实现多机器人编队控制等。
研究目的旨在提高Mecanum轮式移动机器人在复杂环境中的轨迹跟踪精度和编队控制能力,推动移动机器人技术的发展和应用。
研究方法采用理论分析、仿真实验和实际测试相结合的方法进行研究。
首先建立机器人运动学模型,然后设计基于PID控制的轨迹跟踪控制器,最后实现多机器人编队控制算法并通过仿真实验验证其有效性。
研究内容、目的和方法02mecanum轮式移动机器人概述Mecanum轮式移动机器人是一种基于Mecanum轮的全方位移动机器人,具有结构紧凑、运动灵活、适应性强等特点。
定义与特点Mecanum轮式移动机器人广泛应用于工业自动化、物流运输、救援探测等领域,可完成各种复杂环境下的移动任务。
应用领域例如,在工业生产线上,Mecanum轮式移动机器人可以实现物料的高效、准确传输;在救援现场,该类机器人可进入危险区域进行探测和救援工作。