四旋翼飞行器PID控制器的设计
- 格式:pdf
- 大小:1.42 MB
- 文档页数:39
四旋翼无人飞行器双闭环PID控制器设计
贺翔;陈奕梅;郭建川;修春波
【期刊名称】《制造业自动化》
【年(卷),期】2015(037)018
【摘要】针对Qbal-X4四旋翼无人飞行器自身的结构特点,建立了系统的非线性数学模型,基于此模型设计了由姿态内环与位置外环组成的双闭环PID控制器,并根据姿态与位置的耦合关系提出了内外环之间进行控制量校正的方法,以提高控制器的控制精度.最后将该控制器用于Qball-X4系统,成功地实现了室内定点悬停飞行,实验结果验证了该控制方法的有效性以及较好的控制效果.
【总页数】5页(P23-26,36)
【作者】贺翔;陈奕梅;郭建川;修春波
【作者单位】天津工业大学电气工程与自动化,天津 300387;天津工业大学电气工程与自动化,天津 300387;天津工业大学电气工程与自动化,天津 300387;天津工业大学电气工程与自动化,天津 300387
【正文语种】中文
【中图分类】TP271.72
【相关文献】
1.基于单片机四旋翼无人飞行器控制系统设计与实现 [J], 黄静怡
2.一种视频监控用系留型四旋翼无人飞行器的结构设计 [J], 吴斌;吴文志
3.四旋翼无人飞行器控制算法设计 [J], 赵玥;陈奕梅
4.四旋翼无人飞行器实验平台设计及姿态控制研究 [J], 范云生;曹亚博;赵永生;王国峰
5.大风条件下陀螺稳定四旋翼无人飞行器设计 [J], 刘睿思
因版权原因,仅展示原文概要,查看原文内容请购买。
四轴飞行控制原理四轴飞行器是一种具有四个旋翼的飞行器,通过控制旋转速度和方向来实现飞行。
其控制原理包括传感器感知、飞行动力学建模、控制器设计和电机控制。
1.传感器感知四轴飞行器通常配备有陀螺仪、加速度计、磁力计和气压计等传感器。
陀螺仪用于测量飞行器的角速度,加速度计用于测量线性加速度,磁力计用于测量地磁场方向,气压计用于测量飞行器的高度。
这些传感器可以提供飞行器在空间中的姿态、位置和速度等信息。
2.飞行动力学建模通过传感器测量的数据,可以对飞行器的姿态进行估计。
姿态估计主要包括姿态角(滚转、俯仰和偏航)的估计和位置的估计。
将姿态和位置的估计值与期望值进行比较,可以得到姿态和位置的误差。
飞行动力学建模主要包括飞行器的动力学方程和状态方程,可以通过这些方程来描述飞行器的姿态、位置和速度等动态变化。
3.控制器设计控制器设计主要是设计一个控制算法来根据传感器测量的数据和期望的姿态和位置来控制飞行器的旋转速度和方向。
通常使用的控制算法包括PID控制器、模型预测控制器、自适应控制器等。
PID控制器是一种常用的控制算法,根据误差的大小和变化率来调整控制信号,从而使飞行器逐渐接近期望的姿态和位置。
4.电机控制四轴飞行器通常使用四个无刷电机来控制旋翼的转速和方向。
通过适当调整电机的转速,可以使飞行器产生所需的推力和力矩,从而实现期望的运动。
电机控制主要包括PWM控制信号的生成、电机转速的调节和电机的航向控制。
PWM控制信号的生成由控制器完成,根据控制器的输出调整电机转速,使旋翼产生所需的推力和力矩。
电机的航向控制通常通过改变电机的转速来实现。
总结:四轴飞行控制原理主要包括传感器感知、飞行动力学建模、控制器设计和电机控制。
通过传感器感知飞行器的角速度、线性加速度、地磁场方向和高度等信息,通过飞行动力学建模估计飞行器的姿态和位置,根据期望的姿态和位置与估计值的误差,设计控制算法来控制飞行器的旋转速度和方向,通过调整电机的转速,使飞行器产生所需的推力和力矩,从而实现期望的飞行。
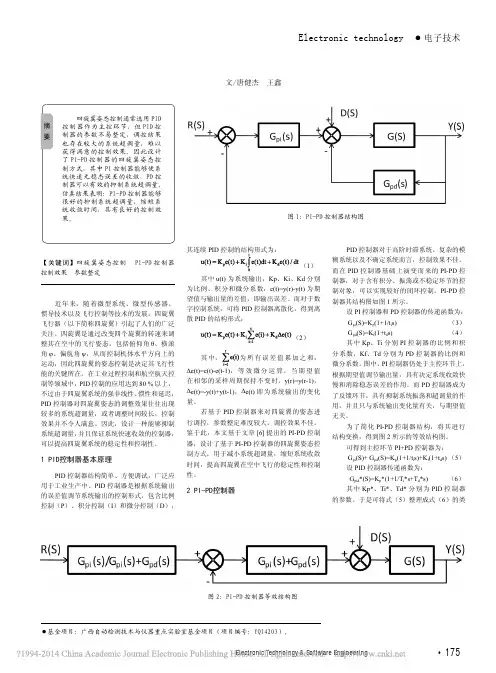
Electronic technology・ 电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 175【关键词】四旋翼姿态控制 PI-PD 控制器 控制效果 参数整定近年来,随着微型系统、微型传感器、惯导技术以及飞行控制等技术的发展,四旋翼飞行器(以下简称四旋翼)引起了人们的广泛关注。
四旋翼是通过改变四个旋翼的转速来调整其在空中的飞行姿态,包括俯仰角θ、横滚角φ、偏航角ψ,从而控制机体水平方向上的运动,因此四旋翼的姿态控制是决定其飞行性能的关键所在。
在工业过程控制和航空航天控制等领域中,PID 控制的应用达到80 %以上,不过由于四旋翼系统的强非线性、惯性和延迟,PID 控制器对四旋翼姿态的调整效果往往出现较多的系统超调量,或者调整时间较长,控制效果并不令人满意。
因此,设计一种能够抑制系统超调量,并且保证系统快速收敛的控制器,可以提高四旋翼系统的稳定性和控制性。
1 PID控制器基本原理PID 控制器结构简单、方便调试,广泛应用于工业生产中。
PID 控制器是根据系统输出的误差值调节系统输出的控制形式,包含比例控制(P )、积分控制(I )和微分控制(D ),基于PI-PD 控制器的四旋翼姿态控制文/唐健杰 王鑫其连续PID 控制的结构形式为:(1)其中u(t)为系统输出,Kp 、Ki 、Kd 分别为比例、积分和微分系数,e(t)=y(r)-y(t)为期望值与输出量的差值,即输出误差。
而对于数字控制系统,可将PID 控制器离散化,得到离散PID 的结构形式:(2)其中,为所有误差值累加之和,Δe(t)=e(t)-e(t-1),等效微分运算。
当期望值在相邻的采样周期保持不变时,y(r)=y(r-1),Δe(t)=-y(t)+y(t-1),Δe(t)即为系统输出的变化量。
若基于PID 控制器来对四旋翼的姿态进行调控,参数整定难度较大,调控效果不佳。
基于STM32的四旋翼飞行器控制系统设计引言:四旋翼无人机近年来逐渐走向商业化和日常生活化,广泛应用于航拍、货运、农业等领域。
为了保证飞行器的平稳、安全飞行,需要设计一个可靠的控制系统。
本文基于STM32单片机,设计了一种适用于四旋翼飞行器的控制系统。
一、硬件设计1.主控板主控板采用STM32单片机,该单片机具有高性能、低功耗、强大的控制能力等优势。
它能够完成飞行器的数据处理、控制输出等任务。
2.传感器为了获取飞行器的姿态信息,需要使用加速度传感器和陀螺仪。
加速度传感器用于测量飞行器的加速度,陀螺仪用于测量飞行器的角速度。
这些传感器通常被集成在一块模块上,直接连接到主控板。
3.遥控器为了实现飞行器的遥控操作,需要使用遥控器。
遥控器通过无线通信与主控板进行数据传输,控制飞行器的起降、悬停、转向等操作。
4.电源管理飞行器控制系统需要提供可靠的电源供电。
因此,需要设计一个电源管理模块,包括锂电池、电池充电管理电路和电源开关等。
二、软件设计1.姿态估计通过加速度计和陀螺仪的数据,使用滤波算法(如卡尔曼滤波)对飞行器的姿态进行估计。
根据姿态的估计结果,可以计算出飞行器的控制输出。
2.控制算法针对四旋翼飞行器,常用的控制算法有PID控制算法和模糊控制算法。
PID控制算法通过比较飞行器的期望姿态和实际姿态,计算出相应的控制输出。
模糊控制算法可以根据模糊规则和模糊集合来计算出控制输出。
3.通信模块为了实现与遥控器之间的无线通信,需要使用无线通信模块,例如蓝牙模块或者无线射频模块。
通过与遥控器进行数据传输,可以实现遥控操作,并接收遥控器发送的命令。
三、控制流程1.初始化飞行器启动时,首先进行传感器的初始化,包括加速度传感器和陀螺仪的初始化。
然后进行电源管理的初始化,确保电源供电正常。
2.传感器数据采集通过传感器采集飞行器的姿态数据,包括加速度和角速度。
3.姿态估计根据传感器采集的数据,使用滤波算法对飞行器的姿态进行估计。
PID在四旋翼上的应用原理1. 引言四旋翼作为一种常见的无人机类型,其稳定飞行是实现任务的关键要素。
而PID控制器作为一种经典的控制算法,被广泛应用于四旋翼的飞行控制中。
本文将介绍PID控制器在四旋翼飞行控制中的应用原理。
2. PID控制器简介PID控制器是一种经典的反馈控制算法,其名称来源于三个控制参数:比例系数(P)、积分系数(I)和微分系数(D)。
PID控制器的基本原理是通过对系统输出和参考输入的误差进行测量,并根据比例、积分和微分的关系来调整输出。
具体来说,PID控制器根据误差的大小和变化趋势来计算控制输出,以使系统快速、稳定地达到期望的状态。
3. PID在四旋翼飞行控制中的应用在四旋翼飞行控制中,PID控制器主要应用于姿态控制和高度控制两个方面。
3.1 姿态控制四旋翼的姿态控制主要包括俯仰控制、横滚控制和偏航控制。
PID控制器通过测量四旋翼当前的姿态(包括俯仰角、横滚角和偏航角)和期望的姿态,计算出相应的控制输出,以实现期望的姿态调整。
具体的控制过程如下:•P控制:根据当前姿态和期望姿态的误差,按比例系数计算出P控制量。
P控制主要用于响应误差,能够快速消除较大的姿态误差,但缺乏稳定性。
•I控制:根据当前姿态和期望姿态的误差累积,按积分系数计算出I 控制量。
I控制主要用于消除静差,能够持续调整姿态直至误差为0。
•D控制:根据当前姿态和期望姿态的误差变化率,按微分系数计算出D控制量。
D控制主要用于抑制姿态的震荡,能够使系统更加稳定。
通过综合考虑P、I和D控制量,PID控制器能够实现四旋翼姿态的精确控制。
3.2 高度控制四旋翼的高度控制主要包括上升和下降控制。
PID控制器通过测量四旋翼当前的高度和期望的高度,计算出相应的控制输出,以实现期望的高度调整。
具体的控制过程如下:•P控制:根据当前高度和期望高度的误差,按比例系数计算出P控制量。
P控制主要用于响应误差,能够快速消除较大的高度误差,但缺乏稳定性。
PID算法在四旋翼飞行器上的应用
PID算法是一种用于控制系统的自适应控制算法,常用于四旋翼飞行器的控制系统中。
四旋翼飞行器是一种能够通过旋转四个螺旋桨来实现飞行的无人机,具有机动性好、稳定
性高的特点。
在四旋翼飞行器的控制系统中,PID算法可以用于控制飞行姿态、稳定飞行
高度以及进行导航等。
PID算法常用于控制四旋翼飞行器的飞行姿态。
通过测量四旋翼飞行器的倾斜角度,
即俯仰、滚转和偏航角,可以使用PID算法来控制四个螺旋桨的旋转速度,从而控制四旋
翼飞行器的飞行姿态。
PID算法根据当前的姿态误差、误差的变化率以及误差的积分值来
计算出修正系数,通过调整四个螺旋桨的旋转速度来达到平稳和精确的姿态控制。
PID调试一般原则
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。
一般步骤
a.确定比例增益P
确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。
输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。
比例增益P调试完成。
b.确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。
记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。
积分时间常数Ti调试完成。
c.确定积分时间常数Td
积分时间常数Td一般不用设定,为0即可。
若要设定,与确定P和Ti的方法相同,取不振荡时的30%。
d.系统空载、带载联调,再对PID参数进行微调,直至满足要求。
简单口诀:
参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。
微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低。
四旋翼飞行器飞行控制系统研究与设计随着社会科学技术的不断发展,微控制器、传感器及电力驱动技术的成熟,四旋翼飞行器已经逐渐取代了传统的螺旋翼直升机飞行器,由于四旋翼飞行器有十字架构和四个螺旋翼,其属于一个强耦合、非线性及欠驱动的六自由度系统,本文分析基于模糊控制的PID控制算法,以求持续提高四旋翼飞行器的控制效果。
标签:四旋翼飞行器;动力学模型;模糊控制;PID控制四旋翼飞行器由于其独特的飞行方式使得其起飞和降落需要较少的空间,便于保持在较高的操纵性能飞行在障碍物密集的环境当中,同时四旋翼飞行器可以保持稳定的飞行姿态,因此在军事和民用领域都有较好的应用前景。
四旋翼飞行器具有简单的机械结构,其主要由十字状构架和四个旋翼组成,在对四旋翼飞行器数学建模时其属于强耦合、非线性及欠驱动六自由度系统,通过控制四个螺旋桨不同速度就可是实现不同的飞行姿态。
对于非线性强耦合的系统的控制较为困难,因此要实现四旋翼飞行器从初始位置运行到既定位置并能保持当前的运动状态,就可以将非线性的四旋翼飞行器模型进行近似线性化的处理。
在四旋翼飞行器控制过程中可以采用双闭环结构,将内环角度环输出作为外环速度环的控制输入,从而实现对四旋翼飞行器运行姿态的控制。
1 四旋翼飞行器的控制原理1.1 四旋翼飞行器的垂直飞行与俯仰飞行的控制原理四旋翼飞行器在控制过程中通过调整电机转动速度来改变合力实现飞行的多种姿态。
在四旋翼飞行器垂直飞行过程中,首先需要处理好电机转动过程中产生的反转矩作用,在1号与3号电机逆时针运行的同时2号与4号电机顺时针旋转,当两者产生的合力能保持大小一致时,就会使他们产生的反扭矩互相完全抵消。
當各电机均产生向上拉力且拉力大于飞行器重力时就会使四旋翼飞行器上升,同时电机转动速度增加会使拉力变大,当拉力大于飞行器重力时就可以实现悬停状态,为了保证四旋翼飞行器可以实现垂直飞行,就需要四个电机的转动速度相同。
当四旋翼飞行器需要产生俯仰飞行时,可令2号和4号电机朝同一个方向旋转并保持相同的旋转速度,1号电机运行速度增加,3号电机运行速度降低,则会使四旋翼飞行器向X轴方向产生俯仰并进入不平衡状态。
PID算法在四旋翼飞行器上的应用
PID算法是一种常用的控制算法,可以用于四旋翼飞行器的控制。
下面我将介绍PID
算法在四旋翼飞行器上的应用。
四旋翼飞行器是一种基于四个电动机的飞行器,通过调节电动机的转速来实现飞行和
悬停。
PID算法可以通过反馈控制的方式,保持四旋翼飞行器在飞行过程中的稳定性和精
确性。
PID算法是由比例(P)、积分(I)和微分(D)三个参数组成的。
比例参数用于调节输出与误差之间的线性关系,积分参数用于去除系统的静态误差,微分参数用于预测误差
的变化趋势。
在四旋翼飞行器中,PID算法主要被用于调节飞行器的姿态,包括横滚、俯仰和偏航
三个方向的姿态控制。
四旋翼飞行器通常使用陀螺仪来测量姿态,然后使用PID算法来调
节电动机的转速,以实现姿态的稳定。
具体来说,比例参数可以根据当前测量的姿态误差来调节电动机的转速,使得姿态误
差越大,调节的力度越大。
积分参数可以根据过去一段时间内的姿态误差的累积值来调节
电动机的转速,以去除系统的静态误差。
微分参数可以根据姿态误差的变化趋势来调节电
动机的转速,以预测系统的动态特性。
通过不断地调节电动机的转速,PID算法可以使得四旋翼飞行器保持在期望的姿态上,并且具有较好的稳定性和控制精度。
在实际应用中,PID算法可能需要进一步进行参数调
节和优化,以适应不同的控制需求和环境条件。
PID算法在四旋翼飞行器上的应用可以帮助实现飞行器的稳定控制,提高飞行的安全
性和精确性。
随着无人机技术的不断发展,PID算法也在不断地优化和改进,为飞行器的
自动控制提供更多的可能性。

四旋翼无人机自主飞行控制系统设计与优化无人机技术在近年来快速发展,成为了现代航空领域的重要组成部分。
四旋翼无人机由于其灵活性和机动性而得到广泛应用,但是其飞行控制系统的设计与优化一直是一个具有挑战性的问题。
一个稳定和可靠的飞行控制系统对于四旋翼无人机的飞行安全和性能至关重要。
设计一个有效的飞行控制系统需要考虑多个因素,包括飞行器的动力学模型、传感器数据的获取与处理、控制算法的选择与实现等。
首先,我们需要建立四旋翼无人机的动力学模型,以便更好地理解其飞行特性。
四旋翼无人机的动力学模型可以通过空气动力学原理和刚体运动方程来描述。
这些方程将飞行器的状态(如位置、速度和姿态)与外部作用力(如旋翼推力)联系起来,从而形成了系统的动力学模型。
基于动力学模型,我们可以进一步设计飞行控制系统的传感器子系统。
传感器的作用是获取飞行器的状态信息,如加速度、姿态和位置等。
常用的传感器包括加速度计、陀螺仪、磁力计和GPS等。
这些传感器可以通过信号处理和滤波算法来提取飞行器的状态信息,并与动力学模型进行匹配。
在传感器数据的基础上,我们需要选择合适的控制算法来实现飞行控制系统。
常见的控制算法包括比例积分微分(PID)控制和模型预测控制(MPC)等。
PID控制是一种简单而常用的控制方法,适用于一般情况下的飞行控制。
而MPC控制则更适用于复杂场景下的飞行控制,它能够预测飞行器的未来状态,并根据目标设定进行优化调整。
选择适当的控制算法需要综合考虑飞行任务的要求、控制精度和计算复杂度等因素。
此外,对于四旋翼无人机的飞行控制系统,还可以进行一些优化设计。
例如,我们可以引入自适应控制算法来应对飞行器动力学模型的参数不确定性。
自适应控制可以根据实时的飞行器状态来自动调整控制参数,以达到更好的飞行性能。
另外,我们还可以采用强化学习算法来进行自主飞行控制系统的优化。
强化学习算法通过不断试错探索,逐渐优化控制策略,从而提高系统的性能。
最后,为了验证设计的飞行控制系统的性能,我们可以进行仿真和实验。
基于PID控制器的四旋翼飞行器系统设计
吕闯;王业琴;唐中一;马千里;申伟
【期刊名称】《工业控制计算机》
【年(卷),期】2016(0)9
【摘要】以STM32F103C8T6作为主控芯片,进行了四旋翼飞行器系统的软硬件
设计,针对四旋翼飞行器系统稳定性问题,进行坐标变换和姿态解算,建立俯仰、横滚、偏航通道传递函数.采用PID控制器对多旋翼的姿态进行控制,仿真结果表明:PID控制器能够减少飞行器的稳态误差,使整个飞行器系统的稳定性能得到提高,实现对飞
行器姿态稳定控制和准确定位.
【总页数】3页(P78-79,82)
【作者】吕闯;王业琴;唐中一;马千里;申伟
【作者单位】淮阴工学院自动化学院,江苏淮安223003;淮阴工学院自动化学院,江
苏淮安223003;淮阴工学院自动化学院,江苏淮安223003;淮阴工学院自动化学院,
江苏淮安223003;淮阴工学院自动化学院,江苏淮安223003
【正文语种】中文
【相关文献】
1.基于RandW-SecPSO的四旋翼飞行器分数阶PID控制器参数优化 [J], 赵玉颖;姜香菊;曾幼涵
2.基于Mahony滤波器和PID控制器的四旋翼飞行器姿态控制 [J], 黄坡;马艳;杨
万扣
3.基于单神经元PID控制器的四旋翼飞行器航迹控制 [J], 罗林;李中志;;
4.农用四旋翼飞行器避障系统设计——基于机器视觉和无线定位 [J], 杨玉霞;陈留亮
5.基于LabVIEW的四旋翼飞行器姿态监测系统设计 [J], 谢檬;南洋
因版权原因,仅展示原文概要,查看原文内容请购买。
四旋翼飞行器控制系统设计曹凯;马贝;王翔武【摘要】The quadrotorcraft attitude control is the core of the four rotorcraft control system. In this study, the attitude control system of four rotorcraft is designed by analyzing the flight principle and model of the four rotorcraft. In this system, the STM32 series processor is used as the main chip, MPU6050 triaxial acceleration set, the triaxial gyroscope inertia measurement unit, magnetometer, and other sensors to detect posture information. The system is based on the idea of modular design and the sensor uses a simple structure of the digital interface to exchange data. The closed-loop control of attitude angle is carried out by double closed-loop PID control algorithm. Finally, the experimental results show that the flight effect of the four rotorcraft is stable on the experimental platform, and the system meets the requirements of flight attitude control of four rotorcraft.%四旋翼飞行器姿态控制是四旋翼飞行器控制系统的核心.通过分析四旋翼飞行器的飞行原理,模型建立,设计了四旋翼飞行器的姿态控制系统;在该系统中采用STM32系列处理器作为主控芯片,MPU6050三轴加速度集和三轴陀螺仪惯性测量单元、磁力计等传感器用于姿态信息检测.本文中传感器使用结构简单的数字接口对数据进行交换,运用模块化的思想对系统进行设计.使用PID控制算法进行姿态角的闭环控制,最终实验结果表明,在实验平台上四旋翼飞行器飞行效果稳定,系统满足四旋翼飞行器飞行姿态控制的要求.【期刊名称】《计算机系统应用》【年(卷),期】2018(027)001【总页数】5页(P61-65)【关键词】PID控制;STM32控制器;四旋翼飞行器;姿态控制【作者】曹凯;马贝;王翔武【作者单位】西安工业大学电子信息工程学院, 西安 710032;西安工业大学电子信息工程学院, 西安 710032;西安工业大学电子信息工程学院, 西安 710032【正文语种】中文四旋翼飞行器是指可以实现自主或遥控飞行,且不需要操作人员、具有四个旋翼的飞行动力装置[1];与常规旋翼式飞行器相比,其分布对称、结构简单紧凑、易于维护、机动性能强,不需要类似于直升机上面的尾桨来抵消反扭矩.因此特别适合在空间比较狭小,人员难以到达的地方展开任务.随着微电子和传感器技术等相关科学的不断发展,特别是在民用和军事领域有很多应用,促进了四旋翼飞行器的快速发展[2].可执行的任务越来越复杂和多样化,功能越来越完备,成为世界范围内研究较为热门的一个领域.四旋翼飞行器技术的不断成熟和门槛的逐步降低不断吸引着越来越多的四旋翼飞行器爱好者投入到了四旋翼飞行器的研制中.文献[3]通过对四旋翼飞行器动力学和运动学分析,建立其数学和物理模型,在此基础上提出了一些控制算法,并进行验证.文献[4]采用 Atmega128作为主控芯片,使用了气压传感器,红外传感器,三轴加速度计,两轴陀螺,三轴磁力计等传感器,完成对四旋翼飞行器硬件系统的设计与实现,最终能完成定高,悬停等任务.本文在四旋翼飞行器飞行原理基础之上进行四旋翼飞行器控制系统的硬件和软件的设计,将设计的四旋翼飞行器进行试验试飞,得出相关结论.1 飞行器基本工作原理四旋翼飞行器的控制由四旋翼飞行器上四个电机旋转速度变化来实现的,无需复杂的传动装置,机械结构相对简单.四旋翼飞行器在飞行时的动作可分为6种,即沿轴向的线性运动和围绕轴向的旋转运动.线性运动为沿着 x,y,z方向的运动,线性运动即为前后左右位置上的变化,旋转运动则可分为滚转运动(roll)、俯仰运动(pitch)、偏航运动(yaw).如图1所示,按照布置方式可分为X和十模式.两种模式对于姿态测量和控制而言没有差别.本设计中考虑到四旋翼飞行器前方可能会安装摄像头等一些传感器,为了不遮挡视线,所以本论文中使用X模式布置方式[4].图1 两种四旋翼飞行器模式示意图四旋翼飞行器的运动可以分解为平动与转动两种运动,平动主要研究飞行器的位置,转动则主要分析飞行器的姿态.大地坐标系(惯性坐标系或者导航坐标系,用e、N或者G表示)用于研究飞行器相对大地的运动状态以及空间位置坐标.机体坐标系(用b或B)坐标原点取机体的重心,用于研究飞行器相对于重心的旋转运动,在图2四旋翼飞行器动力模型图中xB方向指向飞行器的前(横滚轴)、yB方向指向飞行器的右(俯仰轴)和zB方向指向飞行器的下(偏航轴)方向.选取导航坐标系N为参考坐标系[5],以坐标轴xN指向北、yN指向东和zN指向重力方向.M和F分别代表飞行器受到转矩和升力.四旋翼飞行器产生基本动作的原理为:由于旋翼飞行器陀螺效应和空气动力扭矩效应的存在,为使其效应消失,四旋翼飞行器上两两相邻的电机转速方向是相反的,保证4个电机转速一致时机身不发生转动.当四个电机转速相同并且同时增大时,四旋翼飞行器升力将克服四旋翼飞行器的自身重力产生Z轴方向垂直向上的力,使得四旋翼飞行器垂直上升.当升力小于重力时,垂直下降,当升力等于重力时,便保持悬停状态.X轴方向的两个电机不同时处于同一水平面时产生的运动叫俯仰运动,即电机1、4的转速不发生变化,电机2、3的转速增大,则会导致电机2和电机3上产生升力不同,从而导致四旋翼飞行器发生X轴方向的俯仰运动.滚转运动和俯仰运动类似,区别在于滚转运动机身是沿着Y轴方向发生倾斜[6].偏航运动中巧妙的使用了于反扭矩的存在,使得四旋翼飞行器跟随旋翼自转.当四旋翼飞行器对应的转速方向相同的两个电机转速和另外两个电机转速速度不一样时,四旋翼飞行器将会顺着电机转速快的那两个电机旋转方向旋转,实现绕Z轴顺时针或是逆时针的变化,即为偏航运动. 图2 四旋翼飞行器动力模型2 系统结构和姿态解算飞行器系统结构图如图3所示.在此系统中磁力计、加速度计、陀螺仪组成姿态测量系统,主控制器将姿态测量系统的数据进行姿态解算得到当前四旋翼飞行器的飞行姿态,再结合遥控器给定的信号作为PID控制器的输入,随后通过PID控制器输出PWM信号到电子调速器,控制电机转速发生不同的变化,实现对四旋翼飞行器姿态的控制.图3 飞行器系统结构图通过姿态测量系统首先的到传感器的原始数据,获取初始姿态,使用四元数对姿态进行更新,为了便于程序实现四旋翼飞行器控制.由于四元数线性方程组计算量小,易于操作,比较贴近工程实际,欧拉角转换成四元数算法进行姿态更新,通过互补滤波器进行姿态修正,然后对四元数进行规范化处理,进行下一次的姿态更新[7].2.1 初始姿态获取在研究物体转动和位置变化中,常用来唯一的确定定点转动位置的三个一组参量,由俯仰角θ、偏航角ψ和滚转角组成,各轴之间的角度变化用欧拉角来表示,需要分别绕三个坐标轴转动三次方能实现.从导航坐标系n到载体坐标系b的姿态转换矩阵如公式(1)所示.欧拉角的更新方程公式(2):2.2 四元数姿态更新定义一个四元数,如公式(3):通过旋转轴和绕该轴旋转的角度可以构造一个四元数,如公式 (4):其中,α 是绕旋转轴旋转角度,cos(βx)、cos(βy)、cos(βz)为旋转轴在 x、y、z方向的分量,由此确定旋转轴.四元数单位化,如公式(5):欧拉角表达形式简单、便于理解,四元数计算过程简单,传感器中以欧拉角形式输出各姿态量,使用欧拉角转四元数的方式作为姿态更新方法.公式(4)和公式(5)是它们之间的相互转化的公式.由四元数表示方向余弦矩阵如下:3 四旋翼飞行器软件系统设计软件系统中的包含的主要模块有主逻辑模块、传感器数据采集模块、数据处理模块、初始化模块、电机驱动模块、无线遥控模块、飞行控制模块、报警模块等.软件设计采用模块化的思想对四旋翼飞行控制系统进行设计,模块主要包括数据采集与处理模块、控制算法模块、指令收发模块等等.系统上电后首先对系统的硬件进行初始化,此过程中完成四旋翼飞行器上各传感器校准以及电子调速器的自检等,此时如果四旋翼飞行器控制板上出现问题,板上的LED等会发出故障信号主要包括各姿态传感器以及电调电机的自检和传感器校准.完成初始化后,系统等待遥控控制指令,判断是否解锁,解锁后STM32对姿态传感器MPU6050采集到的数据姿态解算,然后给每个电机给定一个输出量,实现对四旋翼飞行器的控制,同时四旋翼飞行器上的信息和各个传感器数据传输给上位机,飞行控制主程序流程图如图4所示.图4 飞行控制器主程序流程图图5是捷联式惯性导航原理图,捷联式惯性导航系统在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏,是一种自主式导航系统.它省去了惯性平台,陀螺仪和加速度计直接安装在飞行器上,使系统体积小、重量轻、成本低、维护方便.此四旋翼飞行器位姿解算中使用的就是捷联式惯性导航.图5 捷联式惯性导航原理图四旋翼飞行器的控制目标是按照操作者的控制在有操作时按照完成指定的操作任务,无操作时保持悬停状态.本文使用PID控制器对四旋翼飞行器进行的姿态控制,原理图如图6所示.PID控制无需对系统进行精确地建模,以姿态欧拉角的期望值与当前姿态角度的计算值之差作为PID控制器的输入,输出PWM控制量到每个电机,三个PID输出量叠加到不同的位置的电子调速器上,驱动电机速度发生变化,使飞行器能够完成三维空间的各种运动[9].图6 姿态 PID 控制整体流程图四旋翼飞行器系统是一个非线性系统,当四旋翼飞行器处于悬停和稳定平稳飞行时,可已经四旋翼飞行器系统近似为线性系统[10].实际对四旋翼飞行器的控制对象是电机和螺旋桨,螺旋桨的转动是通过电机转动而转动,从而产生力矩和扭矩,然后作用于四旋翼飞行器.陀螺仪得到各姿态的角速率,经过积分得到各姿态角.由于对四旋翼飞行器控制时,实时性要求很高,同时微处理器处理信息、发送指令、无刷电机相应都会产生微秒级的延迟.假如不进行校正,会直观地发现滞后比较严重,所以要进行校正,使响应提前达到稳定的范围之内.系统中采用PID控制器,使用比例参数决定系统的相应速度,积分参数消除四旋翼飞行器系统的稳态误差,微分参数可以使整个系统的相位提前,又可以消除飞行器抖动,从而保证整个系统的稳定.根据每个四旋翼飞行器系统的实际情况,选择合适的控制参数才能得到理想的飞行结果.4 结论论文中该系统主控芯片采用STM32F103微控制器,利用四元数算法得到姿态解算,设计了改进的变参数PID控制算法的姿态控制系统.本论文的优点全面分析和设计了四旋翼飞行器的硬件和软件,最终实现四旋翼飞行器指定的功能,并试验.使用STM32芯片,便于以后对功能进行扩展,如添加GPS模块、图传模块等.在于经过大量的飞行测试,表明该飞行控制系统能够实现四旋翼飞行器稳定的姿态控制,实现了定点悬停、定高悬停、前后侧向飞行等功能.图7 四旋翼飞行器室外悬停PID参数的调节需要耐心细致的工作态度才能得到比较好的结果.通过不断地试验,所设计的原型样机已经能够实现平稳的飞行(如图7,飞行器室外悬停),基本达到了预期的目的.参考文献【相关文献】1 米培良.四旋翼飞行器控制与实现[硕士学位论文].大连:大连理工大学,2015.2 郭宝录,李朝荣,乐洪宇.国外无人机技术的发展动向与分析.舰船电子工程,2008,28(9):12–21.3 赵敏.浅谈四旋翼飞行器的技术发展方向.科技创新与应用,2016,(16):100.4 吕强,郭善亮,王冬来,等.基于 DSP 四旋翼飞行器姿态控制系统硬件设计.计算机与数字工程,2011,39(7):144–146.5 刘峰,吕强,王国胜,等.四轴飞行器姿态控制系统设计.计算机测量与控制,2011,19(3):583–585,616.6 张广玉,张洪涛,李隆球,等.四旋翼微型飞行器设计.哈尔滨理工大学学报,2012,17(3):110–114.7 张镭,李浩.四旋翼飞行器模糊PID姿态控制.计算机仿真,2014,31(8):73–77.8 陈永冰,钟斌.惯性导航原理.北京:国防工业出版社,2007.9 张金楼.经济型运动载体航向姿态测量系统的研究与开发[硕士学位论文].西安:西安电子科技大学,2007.10 刘焕晔.小型四旋翼飞行器飞行控制系统研究与设计[硕士学位论文].上海:上海交通大学,2011.。
摘要近年来,军用和民用市场的广阔应用需求和独特的优势促进了四旋翼飞行器(Quadrotor Helicopter)的发展。
根据自主设计制作的样机,建立了四旋翼飞行器的动力学和动力系统动力学模型,并把卡尔曼滤波器应用于姿态解算,姿态控制部分采用PID(Proportional Integral Derivative)控制器。
四旋翼飞行器的飞行控制系统决定了四旋翼飞行器飞行性能的优劣。
首先,本课题设计了四旋翼飞行器飞行控制系统的总体方案,建立了其动力学数学模型;在此基础上,完成了飞行控制系统的软硬件设计,包括器件选型、硬件电路设计、系统软件设计,并进行了大量调试,解决了程序和硬件设计中存在的问题。
其次,建立完善的四旋翼飞行器飞行控制系统平台,将有助于进一步拓展对四旋翼飞行器飞行导航、控制算法和控制系统开发等方面的研究,为未来进一步研究开发满足不同条件的新型的多用途无人机打下坚实的基础。
最后,实验结果表明,建立的四旋翼飞行器模型与实际是相吻合的,尤其决定飞行器是否优良的关键技术指标如稳定的垂直起降(VTOL)和姿态转换飞行等,都验证了该飞行控制系统具有更好的性能。
通过四旋翼飞行器飞行试验验证了卡尔曼滤波和PID控制器算法可行性。
关键词:四旋翼飞行器 建模 卡尔曼滤波器 PID VTOLABSTRACTThe broad application requirements in both military and civilian markets stimulate the development of Quadrotor Helicopter related projects due to their advantages over regular air vehicles. In this work, Dynamic mathematicalmodel of Quadrotor Helicopter was established. A Quadrotor Helicopter was designed and fabricated, with Kalman Filtering is used for attitudecalculation and PID control is utilized for attitude control. The flight controlsystem determines the various flight performance of Quadrotor Helicopter.Firstly,I have completed the flight control system hardware and software design,such as the hardware circuit design, device selection, software designand so on. Great deal of debugging was carried out, which means removingbugs from programs. The defects exist in the electronic hardware weresolved in the process of debugging.Secondly,The establishment of a perfect Quadrotor Helicopter fightcontrol system platform will be helpful to further expand on QuadrotorHelicopter flight navigation research, control algorithm design,and controlsystem development. The subject lays a solid foundation for further research ona new type of multi-purpose unmanned aerial vehicle(UA V)which would meet different conditions.Finally,Experimental results show that the established dynamics model is effective to the designed Quadrotor Helicopter. Our designed QuadrotorHelicopter presents excellent performance on some key technical indices, as the accuracy control of the Quadrotor Helicopter (attitude and position) and thevertical take-off and landing (VTOL).Experiments on a prototype of Quadrotor Helicopter are given to demonstrate the effectiveness and feasibility of the proposed scheme.Key Words: Quadrotor Helicopter; modelling; Kalman Filtering; PID; VTOL中国科学技术大学学位论文原创性声明本人声明所呈交的学位论文,是本人在导师指导下进行研究工作所取得的成果。
四旋翼飞行器飞行控制技术综述四旋翼飞行器是一种以四个旋翼作为动力装置的飞行器,通过调节四个旋翼的转速和倾斜角度,实现对飞行器的姿态和飞行控制。
近年来,随着无人机技术的快速发展,四旋翼飞行器已经成为了无人机领域中最常见的一种飞行器类型。
本文将对四旋翼飞行器的飞行控制技术进行综述,从传统PID控制到现代的自适应控制等多种控制技术进行介绍,为读者提供一份全面的四旋翼飞行器飞行控制技术综述。
一、传统PID控制PID控制是一种经典的控制方法,通过比例、积分和微分三个部分来对系统进行控制。
在四旋翼飞行器的控制中,PID控制常常被用于对飞行器的姿态进行控制。
这种方法通过对飞行器的姿态误差进行检测,并根据误差的大小和变化率来对四个旋翼进行调节,从而实现飞行器的稳定飞行。
传统PID控制也存在一些问题,比如对参数的调节比较困难,容易出现振荡和过冲等问题。
针对四旋翼飞行器的特点,一些改进的控制方法逐渐被引入到飞行器的控制中。
二、模糊控制模糊控制是一种基于模糊逻辑的控制方法,它将模糊集合和模糊规则应用于控制系统中,通过模糊化、模糊推理和去模糊化等步骤来实现对系统的控制。
在四旋翼飞行器的控制中,模糊控制可以更好地应对系统非线性和不确定性的特点,从而提高控制性能。
三、神经网络控制神经网络控制是一种基于人工神经网络的控制方法,通过训练神经网络来模拟系统的动态特性,并利用神经网络的学习能力来对系统进行控制。
在四旋翼飞行器的控制中,神经网络控制可以适应系统的非线性和不确定性,同时具有较强的自适应能力。
四、自适应控制五、鲁棒控制鲁棒控制是一种能够保持系统稳定性和性能的控制方法,通过设计具有鲁棒性的控制器来应对系统的不确定性和外部扰动。
在四旋翼飞行器的控制中,鲁棒控制可以有效地抑制系统的振荡和过冲,保证飞行器的稳定飞行。
四旋翼飞行器的飞行控制技术涵盖了传统的PID控制、模糊控制、神经网络控制、自适应控制和鲁棒控制等多种方法。
每种方法都有其适用的场景和特点,需要根据具体的应用需求和系统特性进行选择。