具有升压和容错功能的开绕组感应电机驱动系统
- 格式:pdf
- 大小:1.01 MB
- 文档页数:8
基于SVPWM的五相感应电机转矩预测控制策略摘要:多相电机具有低压大功率、效率高、转矩脉动小以及故障时能抗干扰运行等优势,在大功率和高可靠性工业应用场合得到了广泛应用。
直接转矩控制作为高精度多相调速的重要方式得到了深入的研究,针对传统直接转矩控制(dtc)存在的缺点,如开关频率不恒定,转动脉动大等;基于上述问题,本文对基于多相空间矢量脉宽调制(svpwm)的转矩预测控制方法进行了研究。
仿真和实验结果表明,基于多相svpwm的转矩预测控制能够有效改善定子电流,减小转矩脉动,进而提高电机运行性能。
关键词:多相电机直接转矩控制预测控制多相svpwm 前言与传统的三相电机变频调速系统相比,多相系统[1,2]拥有诸多优势:能够实现低压大功率、拥有更多的控制自由度、更强的容错运行能力和更小的转矩脉动等。
由于上述优点以及大功率传动领域的旺盛需求,多相调速系统成为学术界和工程界的研究热点。
目前高精度多相调速系统控制策略主要有矢量控制和直接转矩控制,其中矢量控制对参数的依赖性比较大,而直接转矩控制具有系统结构简单,转矩动态响应快,以及鲁棒性好等优点,因此得到越来越多的研究。
基于开关表的直接转矩控制[3]策略通过滞环方式,粗略地控制磁链大小和转矩变化方向,而不能精确地控制其变化量,会导致调速系统低速运行性能较差并且稳态转矩脉动较大,特别是在多相电机中,注入的电压谐波映射到其他平面,进而产生谐波电流,对电机产生不利影响。
而基于多相svpwm的转矩预测控制策略[4],可以通过相关算法得到所需要的理想电压矢量,从而实现对转矩差值和磁链差值的精确控制。
基于svpwm的转矩预测方法将磁链差值和转矩差值经过两个pi调节器,得到相应平面的电压矢量。
以5相感应电机为例,可以分为基波平面和3次谐波平面,通过上述方法可以很方便实现对任何一个平面电压矢量的控制,进而可以有效抑制定子电流谐波,并且能够应用非正弦供电技术。
1、基于svpwm的转矩预测控制方法相关文献已经对传统3相电机基于svpwm[的转矩预测控制方法进行了相关介绍与研究[3-4]。

无刷直流电机控制系统设计与实现一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效率、低噪音、长寿命等优点,在电动工具、航空航天、汽车电子、家用电器等多个领域得到了广泛应用。
然而,要实现无刷直流电机的高效、稳定运行,离不开先进且可靠的控制系统。
本文旨在对无刷直流电机控制系统的设计与实现进行深入探讨,分析控制策略、硬件构成和软件编程,并结合实例,详细阐述控制系统在实际应用中的表现与优化方向。
通过本文的研究,希望能够为相关领域的学者和工程师提供有价值的参考,推动无刷直流电机控制系统技术的进一步发展和应用。
二、无刷直流电机基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器代替传统机械换向器的直流电机。
其基本工作原理与传统的直流电机相似,即利用磁场与电流之间的相互作用产生转矩,从而实现电机的旋转。
但与传统直流电机不同的是,无刷直流电机在结构上取消了碳刷和换向器,采用电子换向技术,通过电子控制器对电机内部的绕组进行通电控制,从而实现电机的旋转。
无刷直流电机通常由定子、转子、电子控制器和位置传感器等部分组成。
定子由铁芯和绕组组成,负责产生磁场;转子则是由永磁体或电磁铁构成,负责在磁场中受力旋转。
电子控制器是无刷直流电机的核心部分,它根据位置传感器提供的转子位置信息,控制电机绕组的通电顺序和通电时间,从而实现电机的连续旋转。
位置传感器则负责检测转子的位置,为电子控制器提供反馈信号。
在无刷直流电机的工作过程中,当电机绕组通电时,会在定子中产生一个旋转磁场。
由于转子上的永磁体或电磁铁与定子磁场之间存在相互作用力,转子会在定子磁场的作用下开始旋转。
当转子旋转到一定位置时,位置传感器会向电子控制器发送信号,电子控制器根据接收到的信号控制电机绕组的通电顺序和通电时间,使定子磁场的方向发生变化,从而驱动转子继续旋转。

有刷直流电机工作原理详解有刷直流电机是一种广泛应用于各种工业领域的电机,其工作原理基于电磁感应原理,通过磁场和电流的作用力使转子转动。
下面将对有刷直流电机的工作原理进行详细解释。
一、有刷直流电机的结构有刷直流电机主要由定子、转子、电刷、换向器等部分组成。
定子通常由铁芯和绕组组成,用于产生磁场;转子由铁芯和绕组组成,其上产生的电流与定子的磁场相互作用产生转矩;电刷和换向器则用于控制电流的方向,保证电机正反转。
二、有刷直流电机的工作原理1、通电后,定子绕组产生磁场当有电流通过定子绕组时,绕组中的电流将产生磁场,该磁场在空间上呈闭合状态,称为磁路。
在磁路上,磁力线分布不均匀,使得磁路上的各点具有不同的磁阻。
2、转子在磁场中受力转动转子上的绕组在磁场中会受到力的作用,这个力就是转矩。
转矩的方向与电流的方向有关,当电流方向改变时,转矩方向也会改变。
因此,通过改变电流方向,可以控制电机的正反转。
3、电刷和换向器的作用电刷和换向器是有刷直流电机中非常重要的组成部分。
电刷的作用是将电源的正负极连接到转子的绕组上,以控制电流方向;换向器则用于自动改变电流的方向,以保证电机正反转。
4、调速原理有刷直流电机的调速原理主要是通过改变电流的大小来控制转矩的大小,从而控制电机的转速。
具体来说,当电流增大时,转矩增大,电机的转速也会相应提高;当电流减小时,转矩减小,电机的转速会降低。
因此,可以通过调节电流的大小来实现对电机转速的控制。
三、有刷直流电机的优缺点1、优点:有刷直流电机具有结构简单、控制方便、体积小、转速高、价格低等优点,因此在许多领域得到了广泛应用。
2、缺点:有刷直流电机的缺点主要包括磨损大、维护成本高、寿命短等。
由于电刷和换向器的存在,使得电机的可靠性受到一定的影响。
四、总结有刷直流电机是一种应用广泛的电机,其工作原理基于电磁感应原理,通过磁场和电流的作用力使转子转动。
有刷直流电机的优缺点并存,但其结构简单、控制方便、体积小、转速高等优点使得其在许多领域具有广泛的应用前景。


三相三绕组和三相双绕组1.引言1.1 概述概述部分可以对三相三绕组和三相双绕组进行简要介绍,包括它们在电力系统中的作用和应用领域。
以下是可能的内容:概述三相三绕组和三相双绕组是电力系统中重要的组成部分,用于电能的传输和转换。
它们在发电厂、输电线路、变电站以及配电系统中起着至关重要的作用。
三相三绕组三相三绕组是指一个铁芯上有三个相互独立的绕组,分别与三个相线连接。
这种结构的主要作用是将发电厂产生的电能传输到输电线路,并将电能从输电线路转换为适合用户使用的电压和频率。
三相三绕组的设计和运行使得电力系统的稳定性和可靠性得以保持。
三相双绕组与三相三绕组不同,三相双绕组是指一个铁芯上只有两个相互连接的绕组,分别与两个相线连接,而第三个相线则与接地线连接。
三相双绕组的主要用途是在配电系统中实现电能的分配和供应。
它可以将高压电能转变为适合低压用户所需的电能,并确保电能在不同负载条件下的稳定分布。
这两种类型的绕组在电力系统中扮演不可替代的角色。
它们的设计和应用需要考虑到系统的电压和频率要求,以及负载的差异和变化。
因此,对于工程师和技术人员来说,了解三相三绕组和三相双绕组的原理和特点是至关重要的。
在接下来的正文部分,我们将更详细地探讨三相三绕组和三相双绕组的要点和应用。
通过深入理解它们的工作原理和设计原则,我们可以更好地应对电力系统中的挑战,并确保其安全、稳定地运行。
1.2 文章结构文章结构部分的内容可以包括以下内容:文章结构部分的目的是为读者提供整个文章的框架和组织结构。
本文将分为引言、正文和结论三个主要部分。
引言部分将对三相三绕组和三相双绕组进行概述。
首先介绍电力传输中三相电的基本原理和应用,以及三绕组变压器在电力系统中的重要性。
接着,指出本文将重点关注三相三绕组和三相双绕组的特点、工作原理以及应用场景。
正文部分将详细探讨三相三绕组和三相双绕组的不同之处和共同点。
首先,介绍三相三绕组的基本概念和结构,以及其在电力系统中的应用。
开关磁阻电机的原理及其控制系统开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。
具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。
定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2是二极管,是直流电源。
电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。
电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。
通过气隙的磁力线是弯曲的,此时磁路的磁导小于定、转子磁极轴线重合时的磁导,因此,转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用,使转子逆时针方向转动,转子磁极的轴线O1向定子A相磁极轴线OA趋近。
当OA和O1轴线重合时,转子己达到平衡位置,即当A相定、转子极对极时,切向磁拉力消失。
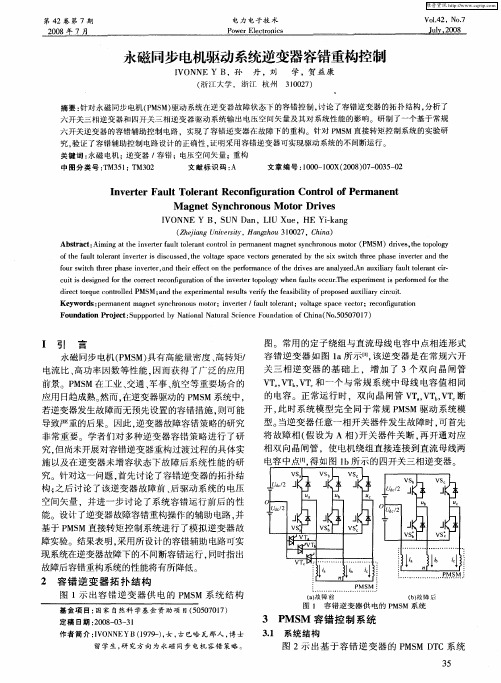
基于分数阶滑模观测器的三相八开关容错逆变器驱动永磁同步电机系统无传感器FCS–MPC许伟奇;张斌;汶雪【摘要】针对三相八开关容错逆变器的永磁同步电机(permanent magnet synchronous motor,PMSM)驱动系统,基于分数阶滑模变结构技术,提出了一种新颖的无速度传感器有限控制集模型预测控制(finite-control-set model pre-dictive control,FCS–MPC)策略.通过驱动系统的运行模式建立三相八开关逆变器和永磁同步电机的数学模型;采用分数阶滑模变结构方法构造PMSM系统转速和反电动势的观测器,以实现对系统转速和反电动势快速准确地实时估计;利用改进型的FCS–MPC策略,以达到减少控制系统计算量和电磁转矩脉动的目的,与此同时,本文中的电流反馈特性的容错控制可有效抑制直流侧母线电容分压不均衡对系统运行产生的不利影响.仿真结果表明,该方法能够保证八开关容错逆变器驱动PMSM系统可靠稳定运行、具有良好的动态性能,并能降低定子电流总谐波失真值.【期刊名称】《控制理论与应用》【年(卷),期】2018(035)007【总页数】13页(P1037-1049)【关键词】三相八开关容错逆变器;电流反馈特性;有限控制集模型预测控制;永磁同步电机;分数阶滑模观测器;无速度传感器【作者】许伟奇;张斌;汶雪【作者单位】兰州交通大学自动化与电气工程学院,甘肃兰州730070;兰州交通大学自动化与电气工程学院,甘肃兰州730070;兰州交通大学自动化与电气工程学院,甘肃兰州730070【正文语种】中文【中图分类】TP2731 引言(Introduction)1981年A.Naba等人[1]提出三电平逆变器(neutral point-clamped,NPC)拓扑结构之后,NPC型三电平逆变器在交流电机传动领域得到广泛应用[2–10].与传统两电平逆变器相比,NPC型三电平逆变器具有较小的功率管承受电压应力和电磁干扰、较低的电压总谐波畸变率和开关损耗等特点,但是由于NPC型三电平逆变器使用了数量较多的开关器件,将会导致逆变器的可靠性降低,一旦逆变器桥臂发生故障会使整个系统无法正常工作,甚至会影响整个系统的运行安全、造成不可估量的经济损失[11].在某些高性能的交流伺服系统控制中,逆变器是最容易出现故障的环节,从而影响系统的控制性能.因此,为了提高逆变器的可靠性,对三电平逆变器进行容错控制有重要的研究意义.经过多年的发展和研究,目前NPC型三电平逆变器的容错控制研究最为热门[12–20],三电平逆变器的主要容错方法有:“三桥臂”和“四桥臂”[19].文献[12–17]采用三桥臂容错的方法,通过三相八开关逆变器(eight-switch inverter,ESI)代替十二开关逆变器,即不需要增加NPC型逆变器的桥臂,由直流侧母线电容替换故障桥臂.四桥臂容错方法,在原有的桥臂基础之上增加一个冗余桥壁,这明显增加逆变器的开关器件数目和成本[18–20].与“四桥臂”相比,八开关逆变器的容错方法(“三桥臂”)具有易操作、结构简单和成本低等优点.在八开关容错逆变器(eight-switchfaulttolerant inverter,ESFTI)控制中,由于直流侧电容电压波动会影响系统运行和控制性能,在文献[17]中详细讨论了直流侧电容出现副值波动的主要原因,并通过注入零序电压来抑制电容电压不平衡,可以有效减少母线上、下电容电压偏差.如何改善电容电压不平衡对驱动系统带来的不利影响,仍然是ESFTI控制需要解决的重要问题之一.永磁同步电机(permanent magnet synchronous motor,PMSM)的FCS–MPC调速系统需要精确的转速信息,但具有较高精度和分辨率的转速传感器价格比较昂贵,而且会增加系统的复杂性和导致测量噪声量化等问题,因此,无速度传感器研究受到了广泛关注.目前电机系统转速辨识方法主要有5种:1)高频信号注入法(HFI)[21];2)扩张卡尔曼滤波器法(EKF)[22];3)模型参考自适应(MRAS)[23];4)扩张状态观测器(ESO)[24];5)滑模变结构(SM)[25].前面1种方法适用于辨识零速和极低速,而后面4种方法适合于辨识中速和高速.第1种通过在基波信号入叠加高频信号实现转速估计,但是高频信号注入会影响系统的响应特性,且该方法主要用于内贴式电机的转速估计.第2种辨识方法无需电机的机械参数和初始位置信息,并具有较强的鲁棒性,但其计算复杂、参数选取难度较大.第3种方法采用自适应系统实现在线校正,此算法简单、易行;但较弱的抗扰动性和鲁棒性是其缺点.第4种方法实质是非线性校正,它不需要电机的准确模型,且具有较强的鲁棒性.第5种方法实质是非线性校正,其具有较强的鲁棒性,不易受到系统参数摄动和外干扰的影响,因此利用滑模变结构辨识电机转速一直受到广泛关注[26].与第4方法相比,第5种方法具有响应速度快,简单易行的特点.传统滑模变结构控制中切换不连续项是主要引起强抗干扰能力的原因,在增强系统鲁棒性的同时带来了系统抖振问题,并导致系统控制性能下降,从而限制其在实际中应用[27–28].为了解决滑模变结构控制抖振问题,分数阶滑模控制是一种行之有效的方案.分数阶微积分和滑模变结构结合能增加微分和积分运算自由度的可变性,能够提高系统的控制性能,对系统模型不确定项和扰动具有较强的鲁棒性[29–31],且能够有效削弱抖振现象.文献[33]提出了基于饱和函数(sat)的感应电机分数阶滑模观测器,采用饱和函数代替切换函数,有效降低系统抖振,但也导致系统抗干扰性降低.为了解决滑模变结构控制抗扰动性和抖振之间的矛盾,文献[34]提出了幂次函数(fal函数)趋近侓的方法,当系统运动点偏离切换面时,fal函数具有较大的模值,提高了系统的响应速度和抗干扰能力;当系统运动点靠近切换面时,没有剧烈的切换,可有效削弱系统抖振现象.由于三相永磁同步电机结构简单、功率因数大且转动惯量比高等特点,使其在雷达、数控机床、电动舵机、机器人等伺服领域得到广泛应用.目前磁场定向控制(field oriental control,FOC)和直接转矩控制(direct torque control,DTC)是控制PMSM的主要方法.近些年来,学者提出一种受到广泛重视的优化控制方法–有限控制集模型预测控制(finite control set model predictive control,FCS–MPC)[35],其具有较强的约束处理能力[36].与FOC和DTC技术相比,FCS–MPC能显著地降低电磁转矩脉动和定子电流的总谐波值(total harmonic distortion,THD),同时提高系统的动态性能.传统的FCS–MPC需要计算出每个采样周期内所有基本电压矢量所对应的电流值,从而增加了系统控制过程的计算量,这也导致其在工业领域的应用受到限制[37].为了克服常规FCS–MPC上述缺点,张永昌等[38]提出了改进型的FCS–MPC,该方法能够相应地减小系统控制过程中的计算量,但是反电动势的估计将会增加系统的复杂性和计算量,同时内部参数摄动会降低系统的控制性能.针对上述情况,本文提出基于分数阶滑模观测器的三相八开关容错逆变器驱动PMSM无传感器FCS–MPC.在考虑母线电容电压不平衡因素下,通过驱动系统的运行模式建立三相八开关逆变器和PMSM的数学模型;针对滑模变结构控制抗扰动性和抖振之间的矛盾问题,设计出基于幂次函数的分数阶滑模观测器,以实现对系统转速、定子电流和反电动势快速准确地实时性估计;同时采用改进型的FCS–MPC策略,可以有效降低控制系统计算量和抑制电磁转矩脉动.仿真结果表明,该控制策略能够保证八开关容错逆变器驱动PMSM系统可靠稳定运行、具有良好的动态性能,比基于分数阶滑模观测器的三相四开关容错逆变器驱动PMSM无传感器FCS–MPC 具有更小开关损耗、较小的电磁转矩脉动和定子电流THD值.2 三相八开关逆变器驱动PMSM系统拓扑及数学模(The math model and topology of PMSM fed by three-phase ESI)2.1 八开关容错逆变器和PMSM的数学模型(The math model of ESFTI and PMSM)NPC型三电平逆变器供电的PMSM系统容错拓扑结构如图1所示,其中a,b和c 相为NPC型三电平逆变器的3个主桥臂.当x(x=a,b,c)相桥臂发生故障时,熔断器F1x和F2x(x=a,b,c)分别用于断开逆变器故障桥臂的上、下桥臂,母线间两个串联电容的中点通过3个双向晶闸管TRn(n=a,b,c)分别连接到PMSM系统绕组故障相输入端.实现逆变器的容错控制需要判断故障开关位置,通过断开故障相桥臂的熔断器,隔离故障相桥臂,由母线电容代替故障桥壁,同时触发其余桥臂的双向晶闸管导通.在不失一般性的情况下,本文以a相为例(b相和c相与a相类似),此时ESFTI和PMSM的等效结构框图如图2所示.图1 NPC三电平逆变器容错拓扑Fig.1 3-level NPC inverter fault tolerant topologyESFTI具有9个开关状态,可以形成9个基本电压矢量.如图3所示,基本电压矢量分布不对称且副值并非完全相等,这将会加大了系统的控制难度.为了解决上述问题,文献[20]提出6个小矢量和1个零矢量作为ESTPI的基本电压矢量,每一个扇区相邻两个矢量都可合成幅值相等矢量Uref,并能够有效地降低功率管的开关频率.本文将采用6个小矢量和1个零矢量作为ESFTI的基本电压矢量.图2 ESFTI和PMSM的等效结构框图Fig.2 Equivalent structure of ESFTI and PMSM图3 ESFTI的基本电压矢量分布Fig.3 Voltage vector distribution of ESFTI如图1所示的系统,开关函数所表示的三相输出电压方程[20]为其中:udc为直流侧母线电压;Si(i=b,c)为两正常桥臂(b,c桥臂)的开关函数,即2.2 母线电容分压不均衡问题(The unbalance problem of bus capacitor voltage)针对三相八开关容错逆变器(ESFTI)的控制,在假设直流电压源固定时,母线电容侧中点电流是导致电容电压不平衡的主要原因[16].在假设直流侧母线电容C1和C2分压相等(可得到式(1)),即:电容两端的电压为假设直流侧母线电容侧C1和C2中点的电流为io,则有在两电容值相等的情况下,即C1=C2=C,则有图2可知,b相(或c相)桥臂开关函数Sb=0(或Sc=0)时的相电流和a相电流是导致中点电流i0̸=0的主要原因;在八开关容错逆变器工作情况下,由基尔霍夫定律(n 点KCL)可得,中点电流i0=ia+ib(或i0=ia+ic).中点电流i0用开关函数表示如下:假设不平衡电压为u,且C1=C2=C,此时电容C1和C2两端的电压分别为式中:通过容错逆变器的运行模式构造PMSM系统数学模型,三相定子电压方程表达式如将式(8)进一步化简可得dq旋转坐标系下的三相永磁同步电机定子电流和反电动势方程表示为式中:k1=Rs/Ls,k2=1/Ls,id和iq分别为dq轴定子电流;ud和uq分别为dq轴定子电压;ed和eq分别为dq轴反电动势;Rs为定子电阻;Ls为定子电感;ωe为电角速度;ψf为永磁体磁链.图4 基于分数阶滑模观测器的三相八开关容错逆变器驱动PMSM系统无传感器FCS–MPC结构框图Fig.4 Block diagram of sensorless FCS–MPC using fraction-order sliding-mode observer for PMSMs fed by eight switchs faulttolerant inverter3 基于分数阶滑模观测器的容错逆变器驱动 PMSM系统 FCS–MPC(FCS–MPC for PMSMs fed by fault-tolerant inverter based on fractional-order sliding-mode observer)针对八开关容错逆变器PMSM驱动系统,基于分数阶滑模观测器,本文给出了图4所示基于分数阶滑模观测器的三相八开关容错逆变器驱动PMSM系统无传感器FCS–MPC结构框图.3.1 分数阶滑模观测器的设计(The design of fractional-order sliding-mode observer)观察永磁同步电机数学模型中的定子电流方程式(10)和反电动势方程式(11),可以看出定子电流方程第1项与反电动势之间存在耦合项.利用函数hd,hq代替这个耦合项,可得到定子电流和反电动势的观测器方程为式中:定子电流误差为e(t)可设计出整数阶积分型滑模面为[34]式中:根据整数阶滑模观测器方程式(12)和(13),设计出一种分数阶滑模观测器.3.2 定子电流和反电动势分数阶滑模观测器设计(The design of stator current and counter electromotive force using fractional-order slidingmode observer)假设dq轴坐标系下的电流误差为:其中的估计值.定义分数阶滑模观测器的滑模面为式中:Dµ为分数阶微积分的算子[33],根据式(14)和式(16),可得到S的一阶导数为式中:选取李雅普诺夫(Lyapunov)函数V=STS/2设计分数阶滑模控制律hd和hq,V的一阶导数表示为假设因此所以式(17)可表示为在李雅普诺夫稳定性条件下,根据系统(20)可得到稳定的分数阶滑模控制律为式中:,sgn s为符号函数,即为证明滑模面的可达性,假设u0>max[Md,Mq],式(21)代入式(20)中可得式中:0<η1≤u0−Md,0<η2≤u0−Mq;则有<0,即滑模控制面S是可达的,分数阶滑模观测器渐进收敛.采用幂次函数fal(s,α,δ)代替理想滑动模态中的开关函数(sgn),可大大地消除系统抖振现象,即其中:fal(·)函数为滑模面切换函数,且线性连续;当δ>0,0<α<1时,可实现小误差大增益等特性.根据式(21)和式(24),采用幂次函数的分数阶滑模控制律表示为将式(25)代入式(12)和式(13),可得到定子电流和反电动势观测方程.3.3 转速和电角度估计(The estimation of speed and electrical angular velocity)将PMSM的电角速度作为观测变量,式(14)可写为根据式(26),可得到PMSM的转速和电角速度观测方程为式中:分别为PMSM的电角速度、机械角速度、转速和电角度的估计值,Np为PMSM的极对数.3.4 基于分数阶滑模观测器的FCS–MPC策略(The FCS–MPC strategy based on fractionalorder sliding-mode observer)在常规FCS–MPC系统中,PMSM系统反电动势的计算需要电感参数和永磁体磁链,所以对PMSM的参数准确性要求较高.温度、饱和等因素的影响,PMSM的参数变化对预测电流的FCS–MPC具有显著的影响[39–40].在旋转坐标下,反电动势为直流量,采用平均值方法估计反电动势,即通过前3时刻的电压和电流估计出相应的反电动势,并将3个时刻的值相加求平均值可获得更为平滑的反电动势[38].但是基于平均值估计的反电动势估计会增加系统的复杂性和计算量,同时降低PMSM系统的控制性能.针对上述问题,本文采用基于分数阶滑模观测器对定子电流和反电动势进行快速准确地实时估计.根据式(12)和式(13)可构造出新的预测电流矢量方程为式中:本文采用二阶欧拉离散法对式(30)进行离散化:式中:Ts为系统采样周期;为预测校正变量;为(k+1)Ts时刻电流预测值.对式(31)进一步化简为式中在式(32)中,令可得到理想的参考定子电压矢量由式(33),若kTs时刻PMSM系统的参考定子矢量电压为则(k+1)Ts时刻定子电流预测矢量为参考矢量电流令uk(k=1,2,···,7)为6个扇区的基本电压矢量,矢量电压误差幅值为如果输出基本电压矢量为零矢量时,则电压矢量误差的幅值为该方法总结为:①通过式(33)计算出②根据式(33)判断所在的扇区K(k=1,2,···,6);③ 对式(34)与式(35)进行比较,如果e0>euk,则最佳电压矢量为euk,否则最佳电压矢量为零矢量.3.5 控制系统的延迟补偿(The delay compensation for the control system)在实际数字系统控制中,由于控制策略的执行过程中实际输出电压矢量与参考电压矢量之间存在一个节拍的延迟[37].为了改善延迟对FCS–MPC性能的不利影响.根据式(32)计算出,然后作为初始条件计算出k+1时刻的补偿电压从而可以相应的补偿系统延迟.4 仿真研究分析(Simulation and analysis research)为了验证本文所提控制方法,通过在MATLAB/Simulink环境下搭建如图4的仿真模型对其进行仿真研究.永磁同步电机的参数见表1.表1 永磁同步电机参数Table 1 Parameters of PMSM参数数值定子电阻R s/Ω 2.875绕组电感Ls/H 0.0085额定功率PN/kW 1.1极对数P 4额定转矩TN/(N·m) 3直流电源udc/V 410额定转速ωr/(r·min−1) 1500母线直线电容C/µF 2040本文给出了4种研究方案.第1种方案:基于同样的FCS–MPC策略,构建基于电流反馈特性的八开关容错控制策略前、后的两个系统,并对它们进行比较分析;第2种方案:针对三相八开关容错逆变器的PMSM驱动系统FCS–MPC策略,分别构建模型参考自适应(MRAS)[23]、滑模变结构(SMO)[25]、滑模模型参考自适应(SM–MRAS)[28]和分数阶滑模(包含整数阶滑模)的转速辨识模型,并对它们进行分析比较;第3种方案:针对三相八开关容错逆变器的PMSM驱动系统FCS–MPC策略,分别构建基于平均值估计的反电动势观测器[39]和基于分数阶滑模观测器的反电动势观测器,并对它们进行分析比较;第4种方案:基于同样的FCS–MPC和电流反馈特性控制的策略,分别够建三相四开关容错逆变器[36]和三相八开关容错逆变器驱动的两个PMSM系统,并对它们进行比较分析.系统采样周期为10µs,图4中PI控制器参数为:Kp=0.1,Ki=0.3;式(25)中分数阶滑模观测器的参数为:λ1=0.08,λ2=0.3,u0=1.2×104,α=0.5,δ=0.01,分数阶阶次为µ=0.1.4.1 基于电流反馈特性的八开关容错控制策略前、后的两个系统比较(The two systems comparison before and after the eight-switch faulttolerant control strategy based on current feedback characteristics)设置给定转速ω*为1000r·min−1,PMSM带载(1N·m)启动.下面将基于电流反馈特性的八开关容错控制策略前、后的控制系统分别表示为系统I和系统II.图5–6分别是系统I和系统II的动态响应曲线.图5 系统I的动态响应Fig.5 Dynamic responses of system I图6 系统II的动态响应Fig.6 Dynamic responses of system II图5–6可知,当直流侧母线电容分压不均衡时,采用基于电流反馈特性的八开关容错逆变器控制策略前的驱动系统转速、电磁转矩和三相定子电流将会产生一些谐波,而通过电流反馈容错控制策略可以有效地抑制其谐波.无论带载启动还是突加负载,八开关容错逆变器(ESFTI)能够使PMSM系统可靠稳定运行,且具有良好的动态性能.由图5–6的(e)图可知,在不增加任何辅助器的条件下,电流反馈容错控制策略可有效减少母线电容电压波动.通过MATLAB中的Powergui FFT工具箱计算出定子相电流总谐波失真(THD)值(如式(36)所示),从而表2给出系统I和系统II的三相电流THD值.由表2可知,与电流反馈容错控制策略前的控制系统(系统I)相比,电流反馈容错控制策略后的控制系统(系统II)具有更小的三相定子电流THD值.总谐波失真THD值计算公式如下:式中:X1为基波值(基波频率为60 Hz),Xn为高次谐波值.表2 三相定子电流THD值Table 2 The THD values of 3-phase stator current相电流 a相电流/%b相电流/%c相电流/%系统I 24.38 12.05 35.02系统II 3.063.13 3.214.2 各转速辨识方法的比较(Comparison of different speed identification methods)针对文献[23,25,28]和本文提出的分数阶滑模观测器转速辨识方法.为了公平合理地比较,使各个观测器具有最好的辨识精度;此时,其所涉及参数分别为:① 模型参考自适应(MRAS)的PI参数:ki=0.001,kp=2.79;② 滑模变结构(SMO)的PI参数:ki=10,kp=50;③ 滑模模型参考自适应的参数:ki=72,kp=0.02,ks=220,a=4.5.仿真时,给定转速ω*设置为1000r·min−1,PMSM带载(1 N·m)启动,在0.2 s时加至到额定负载3 N·m.图7–10分别为模型参考自适应、滑模变结构、滑模模型参考自适应、分数阶滑模(包含整数阶µ=1,分数阶µ=0.5和分数阶µ=0.1)的转速响应曲线.从图7–10的图(a)可看出,在整个系统运行过程中,与模型参考自适应、滑模变结构、滑模模型参考自适应、整数阶µ=1和分数阶µ=0.5的分数阶滑模观测器相比,阶次µ=0.1的分数阶滑模观测器辨识的转速与实际转速响应曲线几乎重合,即阶次µ=0.1的分数阶滑模观测器能够快速准确地跟踪实际转速,并且具有良好的辨识精度.由图7–10的图(b)可知,模型参考自适应、滑模变结构、滑模参考模型自适应、阶次µ=1整数阶滑模和阶次µ=0.5分数阶滑模的观测器,在启动和负载变化时都具有较大的估计误差.由图10可知,基于分数阶滑模的转速观测器中,分数阶阶次µ越小,滑模控制器具有更好的跟随性能,同时具有更小的转速估计误差.图7 基于MRAS的转速响应曲线Fig.7 Speed responses curve based on MRAS图8 基于SMO的转速响应曲线Fig.8 Speed responses curve based on SMO 图9 基于滑模模型参考自适应的转速响应曲线Fig.9 Speed responses curve using sliding-mode MRAS图10 基于分数阶滑模(含整数阶滑模)的转速响应曲线Fig.10 Speed responses curve using fractional-order slidingmode(including integer-order sliding-mode)表3给出了上面观测器的转速和电角度的平均估计误差值.由表3可知,与模型参考自适应(MRAS)、滑模变结构(SMO)、滑模模型参考自适应(SM–MRAS)、阶次µ=1整数阶滑模和阶次µ=0.5分数阶滑模的观测器相比,阶次µ=0.1的分数阶滑模观测器具有更小的转速估计误差和电角度估计误差.表3 转速和电角速度的平均估计误差Table 3 Average estimation error of speed andelectric angular velocity辨识方法 MRAS SMO SM–MRAS转速/(r·min−1) 17.76 13.25 1.24电角度/rad 0.036 0.014 0.11辨识方法阶次µ=1阶次µ=0.5阶次µ=0.1转速/(r·min−1) 0.25 0.12 0.012电角度/rad 0.021 0.01 0.0014.3 基于平均值估计和基于分数阶滑模观测器的反电动势比较(Counter electromotive force comparison between the one based on averageestimation and the other based on fractional-order sliding-mode observer) 设置给定转速ω*为1000 r·min−1,PMSM带载(1 N·m)启动,假设0.2 s时,定子的电感值由Ls=0.0085 H突变为原来的1.5倍,即0.01275 H,永磁体磁链由最初的0.175 Wb降为0.165 Wb;在0.3 s时,定子电感值突变为原来2倍,即0.017 H,永磁体磁链降至0.155 Wb.图11(a)和图11(b)分别为电感变化时基于平均值估计和基于分数阶滑模观测器(阶次µ=0.1)的反电动势响应曲线;图12(a)和图12(b)分别为永磁体磁链变化时基于平均值估计和基于分数阶滑模观测器的反电动势响应曲线. 通过图11–12可看出,在PMSM参数突变之前,与基于平均值估计相比,基于分数阶滑模观测器具有较小的反电动势波动;同时当负载突变时,基于分数阶滑模观测器具有更小的反电动势跌落.图11表明,在定子电感发生突变后,与基于平均值估计的反电动势相比,基于分数阶滑模观测器的反电动势辨识精度较高,并且具有较小的反电动势波动;由图12可看出,永磁体磁链突变时,与基于平均值估计的d轴反电动势相比,基于分数阶滑模观测器的d轴反电动势未产生明显影响,同时基于分数阶滑模观测器的q轴反电动势具有更小的反电动势波动,因此本文所设计的分数阶滑模反电动势观测器具有良好的辨识精度和较强的鲁棒性.图11 定子电感变化时基于平均值估计和基于分数阶滑模观测器的反电动势响应曲线Fig.11 Counter electromotive force response curve between average estimation and fractional-order sliding-mode observer in the case of stator inductance variation图12 永磁体磁链变化时基于平均值估计和基于分数阶滑模观测器的反电动势响应曲线Fig.12 Counter electromotive force response curve between average estimation and fractional-order sliding-mode observer in the case of permanent magnet flux variation4.4 基于三相四开关容错逆变器和三相八开关容错逆变器的两个FCS–MPC PMSM系统比较(The FCS–MPC PMSM system comparison between the one based on three-phase four-switch fault tolerant inverter and the other based on three-phase eight-switch fault-tolerant inverter)为了公平地比较,调整PI参数值,使得三相四开关容错逆变器FCS–MPC的PMSM 系统尽可能具有良好的动态响应特性,此时,系统PI参数为:ki=0.5,kp=0.2;分数阶滑模参数为:λ1=0.06,λ2=0.3,u0=1.5×104,α=0.5,δ=0.01,分数阶阶次µ=0.1.启动给定转速为1000r·min−1,PMSM带载(1 N·m)启动,在0.2 s时加至到额定负载3 N·m.为了表示方便,下面将三相四开关容错逆变器和三相八开关容错逆变器FCS–MPC的PMSM系统分别表示为系统I和系统II,图13和图14分别给出了系统I和系统II的动态响应曲线.图13 系统I的动态响应曲线Fig.13 Dynamic responses curve of System I图14 系统II的动态响应曲线Fig.14 Dynamic responses curve of System II图13–14表明,系统I和系统II的转速和转矩都具有良好的动态性能,同时三相定子电流具有良好的平衡性;由图13–14的图(b)可以看出,与三相四开关容错逆变器FCS–MPC的PMSM系统(系统I)相比,三相八开关容错逆变器FCS–MPC的PMSM系统(系统II)具有更小的电磁转矩波动;三相定子电流响应曲线如图13–14的图(c)所示,THD值经计算(式(26))后列于表4.表4 三相定子电流THD值Table 4 The THD values of 3-phase stator current 相电流 a相电流/%b相电流/%c相电流/%系统I 6.62 9.37 6.98系统II 3.11 3.03 3.08由表4可知,与系统I相比,系统II具有更小的三相定子电流THD值.5 结论(Conclusions)三相八开关逆变器(ESI)作为NPC型三电平逆变器容错拓扑具有重要的研究意义,在考虑直流侧母线电容分电压不均衡的因素下,对三相八开关容错逆变器PMSM系统。
2017年3月 电工技术学报 Vol.32 No. 5第 32 卷第 5 期 TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Mar. 2017
具有升压和容错功能的 开绕组感应电机驱动系统
李春杰黄文新卜飞飞邵佳俊(南京航空航天大学自动化学院南京211106)
摘要为了提高电机驱动系统的可靠性和安全性,提出一种具有单级升压和容错功能的开绕组感 应电机驱动系统。驱动系统运行的拓扑由阻抗源网络和3-H桥逆变器结合而成,既能实现单级升压又 能在变流器发生故障下容错运行。根据直通零矢量插入原则以及3-H桥逆变器的调制策略,详细分析 了单级升压3-H桥逆变器正常运行以及容错运行时的空间矢量脉宽调制方法。最后通过搭建的开绕组 感应电机实验平台,验证了单级升压3-H桥逆变器调制策略的正确性以及开绕组感应电机驱动系统具 有升压和容错功能。关键词:容错运行开绕组感应电机单级升压3-H桥逆变器 中图分类号:TM343
An Open-End Winding Induction Motor Driver with Boost andFault-Tolerant Function
Li Chunjie Huang Wenxin Bu Feifei Shao Jiajun (College of Automation Engineering Nanjing University of Aeronautics and AstronauticsNanjing 211106 China)
Abstract In order to improve the reliability and safety of the motor drive system, an open-end winding
induction motor ( OWIM) driver with single-stage boost and fault-tolerant function is proposed in this paper. The topology of the driver system combines with impedance source network and 3-H bridge inverter, which can realize single-stage boost function and fault-tolerance under the condition when the inverter occurs fault. According to the rule of inserting shoot-through zero vector and the space vector pulse width modulation (SVPWM) method of 3-H bridge inverter, the SVPWM method of normal and fault-tolerant operation for the single-stage Boost 3-H bridge inverter is proposed and analyzed in detail. Finally, the experimental platform of OWIM is built to validate the analysis of the modulation method is correct and the OWIM drive system has boost function and fault-tolerance ability.Keywords: Fault-tolerant operation, open-end winding induction motor (OWIM) , single-stage Boost, 3-H
bridge inverter
〇引言随着电力电子技术的快速发展,由三相逆变器供 电的电机变频调速系统在工业应用中已逐步推广使 用。电机驱动系统主要包括电力电子变换器和电机两 大零部件。电力电子变换装置是最容易发生故障的薄
江苏省普通髙校研究生科研创新计划项目资助(CXLX13_153)。 收稿日期2015-12七7 改稿日期20164)4-27
弱环节。另外,电机定子绕组也会发生故障。不管是 逆变器故障还是电机故障,都会使整个驱动系统停滞 无法运行。具有高可靠性、容错能力的电机驱动系统 成为了主流研究方向。近几年,电机驱动系统领域出现了一种新型多电 平逆变器拓扑——双逆变器[1],这种拓扑结构适用于 开放式绕组电机,即将普通Y联结的三相绕组中点拆 开,将绕组六端引线分别接于两个三相逆变器。三相98电工技术学报2017年3月逆变器既可以是传统的两电平逆变器,也可以是传统 的二极管钳位式三电平逆变器。级联型二极管钳位式 三电平逆变器所需的功率器件较多,存在中点不平衡 等问题[24]。相比之下,级联型两电平逆变器所需的 功率器件较少,不存在中点不平衡的问题,调制方法 简单。此外,基于双逆变器的开绕组电机驱动系统具 备自容错功能[5_7]。因此,开绕组电机驱动系统受到 广大学者的青睐。对于三相电压型H桥逆变器来说, 由电磁干扰引起的误触发很有可能会使同一桥臂的上 下功率管直通,存在较大的安全隐患。而Z源/准Z 源逆变器[84°]的提出解决了这个问题,它把直通现象 变成了一种正常现象,实现了升压功能。文献[1〇, 11]提出了 Z源三电平中点钳位逆变器,它虽具有单 级升压的优点,但是结构复杂,控制繁琐,且存在中 点电压不平衡的问题。本文提出一种阻抗源网络和3-H桥两电平逆变器 相结合的拓扑——单级升压开绕组逆变器,既解决了 传统电压源型逆变器的直通问题,又提高了母线电 压,但此时传统的双逆变器以及三相Z源/准Z源逆 变器的调制方法都不再适用。文献[12]提出了一种改 进型准Z源双逆变器在开绕组感应电机(Open-End Winding Induction Motor,0WIM)驱动系统中的应用, 重点对改进型准Z源双逆变器的拓扑结构进行了分 析,验证了拓扑具有抑制母线电压的作用,并没有对 该拓扑的调制策略进行详细分析。本文详细分析了适 用于所提拓扑正常运行和容错运行时的空间电压矢量 脉宽调制(Space Vector Pulse Width Modulation, SVPWM)方法,并验证了开绕组感应电机驱动系统具 有升压和自容错功能。1 OWIM驱动系统拓扑结构分析单电源供电的0WIM驱动系统如图1所示,该电 机采用开放式绕组的结构形式,每相绕组都有一个 H桥逆变器进行控制。共直流母线的3-H桥逆变器通 过阻抗源网络和直流供电电源相耦合。由于阻抗源网 络的加入使逆变器多了一种状态——直通零矢量。只 要在传统的控制信号中加入直通信号,即可达到升压 和逆变的目的。为了满足电机驱动系统的各种工况,图1所示的 阻抗源网络中串入的二极管更换为可控的功率管Qi, 这样既可以实现能量的双向流动,又可避免电机驱动 系统轻载时的问题[13]。当电机驱动系统处于电动模式 时,功率管仏关断,反并联二极管串联到拓扑中。当 电机驱动系统处于发电模式时,通过控制功率管(^实现能量的反向流动。图1中,Sal4为开关,其开关状 态相应的表示为、4 (\14 = 1为开通,、4 =〇为关 断),其他开关及状态表示方法类似。单级升压3-H 桥逆变器等效电路如图2所示[12]。图2a为双逆变器 处于非直通状态时的等效电路,二极管VDi导通,逆 变桥和电机等效成一个电流源;图2b为双逆变器处 于直通状态时的等效电路,二极管VDi承受反向电压 而截止,三相绕组均处于续流状态,绕组电压为〇。 从图2可以看出,单级升压3-H桥逆变器的等效电路 与准Z源逆变器的等效电路相同[9]。
图1 0WIM驱动系统的拓扑结构 Fig. 1 The topology of OWIM drive system
----------—Lx Qi C2 l2r>r^r>r\
~^batVDj
c\-(a)非直通零矢量等效电路
图2单级升压3-H桥逆变器等效电路 Fig. 2 The equivalent circuit of single-stage boost 3-H bridge inverter第32卷第5期李春杰等具有升压和容错功能的开绕组感应电机驱动系统99
单级升压3-H桥逆变器具有单管故障和单桥臂故 障容错能力[12]。当A相逆变器或者A相绕组发生断 路故障时,容错拓扑如图3所示,可以看出A相绕组 处于开路状态,另外两相可以正常工作。通过对逆变 器剩余的两相进行容错控制可以使电机继续运行。
图3容错运行时的拓扑结构 Fig. 3 The fault-tolerant topology
2 SVPWM策略实施方法分析2.1驱动系统正常运行时SVPWM分析由于3-H桥逆变器有6相桥臂,每相桥臂存在两 种状态,因此3-H桥逆变器共有26 = 64种开关状态。 这64种开关状态存在冗余项,去掉冗余项,在空间上 只能产生19个空间矢量(18个非零空间矢量、1个传 统零矢量)[1],而阻抗源3-H桥逆变器多了一个直通 零矢量。所以,单级升压3-H桥逆变器在空间上产生 20个空间矢量[14]。由于单电源3-H桥逆变器存在共 模电压,共模电压的存在会给电机的正常运行带来不 利的影响,如产生零序电流、轴电流及峰值电流 等[15]。文献[1,15]对共模电压进行了分析,这里不再 赘述。为了抑制零序电流,选择不产生共模电压的矢 量,其空间矢量分布如图4所示[12]。两个逆变器合成 的最大正六边形的幅值为4%。/3;由构成的
正六边形的幅值为则对应的内切圆的半 径(输出电压的最大幅值)为‘;最大线性调制系数 为1,比常规的SVPWM调制降低了 15%[14]。因此, 直流母线电压没有得到充分利用。为了满足驱动系统 要求,就需要更高的直流电压。本文提出的0WIM驱 动系统只需要在调制策略中插入直通零矢量作用时间 就能实现提升母线电压的功能。从图4中可以看出,非零电压矢量的幅值相同, 传统零矢量和直通零矢量的幅值为〇,位于中心。选 择相邻的两个有效电压矢量以及零矢量,按照伏秒平
衡的原则来合成每个扇区内的任意电压矢量[2’16],即uie{ = + + yu^ + TYu^ ⑴式中,为期望电压矢量;[为一个开关周期;7\、 L分别为非零电压矢量K、R及传统零矢量 %和直通零矢量f/sh在一个开关周期的作用时间。直 通零矢量作用时间占用了传统零矢量作用时间,因 此有T〇U〇 TshUsh Ts Ts由式(1)和式(2)可以看出,