AA开关磁阻电动机的模糊控制系统研究
- 格式:pdf
- 大小:970.61 KB
- 文档页数:3

模糊控制技术在机电系统中的应用研究机电系统是现代工业的重要组成部分,其运行过程涉及到控制、监测、保护等多个环节。
为了满足不同工况下系统的运行需求,每一环节都需要有严谨的控制方法和技术支持。
而模糊控制技术作为现代控制领域中的一种智能控制方法,被广泛应用于机电系统中。
一、模糊控制技术概述模糊控制技术是一种基于模糊逻辑的控制方法,相比于传统的精确控制方法,模糊控制技术更加适用于处理不确定性和模糊性问题,其具有适应性强、容错性好等优点。
模糊控制技术的基本思想是通过建立模糊规则库和模糊推理机构,将模糊逻辑运算转换成实际控制规律。
另一方面,模糊控制技术也可以通过不断反馈和调整,实现对系统运行状态的智能感知和控制。
二、模糊控制技术在机电系统中的应用1.温度控制系统在工业生产中,往往需要对温度进行精确控制,以保证生产效率和质量。
传统的温度控制方法通常采用PID控制器,但是其对非线性和时变的温度控制问题处理不够灵活。
而采用模糊控制技术,可以充分利用模糊规则库和模糊推理机结构对非线性和时变的控制问题进行处理,实现温度控制系统的精确控制。
2.电机控制系统电机作为机电系统中的核心部件,对其控制与保护尤为重要。
在传统电机控制中,通常采用方波控制或交错控制来控制电机运行。
然而,这种控制模式容易出现抖动、噪音等问题。
而模糊控制技术可以通过建立模糊规则库和模糊推理机构,对电机进行精确控制,同时对电机输出进行智能调整,使得电机运行更加平稳。
3.液压控制系统液压控制系统是机电系统中广泛应用的控制技术之一,其具有传动力大、受力平稳等优点。
在液压控制系统中,模糊控制技术可以通过建立模糊规则库和模糊推理机构,对液压系统进行精确控制。
在不同的工作状态下,模糊控制技术还可以通过不断反馈和调整,实现对液压系统的运行状态进行智能感知和控制。
4.自适应控制系统自适应控制系统是机电系统中应用较为广泛的一种控制方法。
与传统的控制系统不同的是,自适应控制系统可以根据客观条件对系统控制进行自适应调整,使得系统控制更具灵活性和智能性。
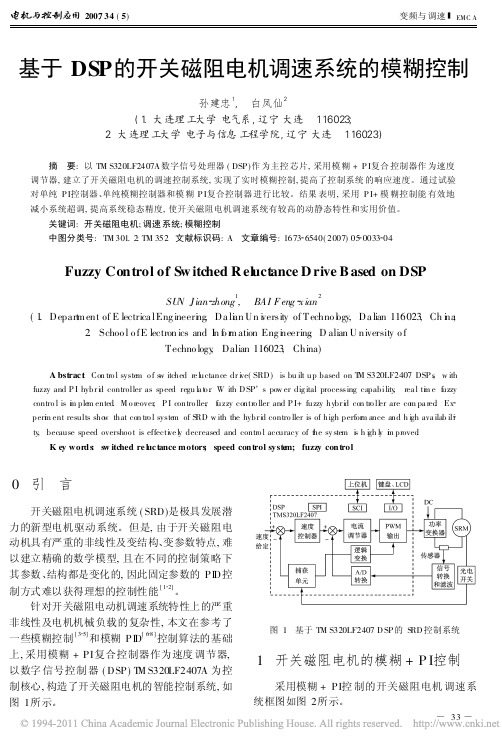
基于DSP的开关磁阻电机调速系统的模糊控制孙建忠1, 白凤仙2(1.大连理工大学电气系,辽宁大连 116023;2.大连理工大学电子与信息工程学院,辽宁大连 116023)摘 要:以TM S320LF2407A数字信号处理器(DSP)作为主控芯片,采用模糊+P I复合控制器作为速度调节器,建立了开关磁阻电机的调速控制系统,实现了实时模糊控制,提高了控制系统的响应速度。
通过试验对单纯P I控制器、单纯模糊控制器和模糊P I复合控制器进行比较。
结果表明,采用P I+模糊控制能有效地减小系统超调,提高系统稳态精度,使开关磁阻电机调速系统有较高的动静态特性和实用价值。
关键词:开关磁阻电机;调速系统;模糊控制中图分类号:TM301.2:TM352 文献标识码:A 文章编号:1673 6540(2007)05 0033 04Fuzzy Control of S w itched R el uctance D rive B ased on DSPSU N J ian zhong1, BAI F eng x ian2(1.Depart m ent of E lectrica lEng ineeri n g,Da li a n Un i v ersity of Techno l o gy,Da lian116023,Ch i n a;2.Schoo l o fE lectron ics and I n f o r m ation Eng i n eering,D alian U niversity o fTechno logy,Dalian116023,China)A bstrac t:Con tro l syste m o f s w itched re l uctance dr i ve(SRD)is bu ilt up based on T M S320LF2407DSP s,w ithfuzzy and P I hybr i d controller as speed regu l a t o r.W ith D SP s pow er dig ital processing capability,rea l ti m e f uzzy contro l is i m ple m ented.M o reover,P I contro ller,f uzzy contro ller and P I+fuzzy hybr i d con tro ll er are co m pa red.Ex peri m ent results sho w that con tro l syste m of S RD w ith the hybr i d contro ller is of high perfor m ance and h i gh ava ilab ili ty,because speed overshoo t is effecti ve l y decreased and contro l accuracy of t he sy stem i s h i gh l y i m proved.K ey word s:s w itched re l uc tance motors;speed con trol syste m;fuzzy con trol0 引 言开关磁阻电机调速系统(SRD)是极具发展潜力的新型电机驱动系统。

基于模糊神经网络的开关磁阻电机换相逻辑辨识的开题报告一、课题研究背景及意义开关磁阻电机是一种新型的交流伺服电机,其结构简单,功率密度高,响应速度快,因此在工业自动化领域得到了广泛应用。
然而,由于开关磁阻电机的换相逻辑相对复杂,导致控制难度较大,因此提高其换相精度和控制可靠性成为了一个亟待解决的问题。
模糊神经网络是一种基于模糊逻辑和神经网络的智能控制方法,其具有处理复杂问题能力强、适应性好、鲁棒性高等优点。
因此,将其应用于开关磁阻电机的换相逻辑辨识具有广泛的研究价值和实用意义。
二、研究内容与方案本研究旨在利用模糊神经网络方法,研究开关磁阻电机换相逻辑的辨识问题。
具体的研究内容包括以下几个方面:1、开关磁阻电机的基本结构和工作原理研究2、模糊神经网络的原理及应用研究3、利用模糊神经网络方法,对开关磁阻电机的换相逻辑进行辨识4、通过实验验证,分析模糊神经网络方法在开关磁阻电机换相逻辑辨识中的优劣及适用条件研究方案如下:1、开展文献调研,对相关领域的研究进展和成果进行全面系统的梳理和总结,并为后续实验设计提供参考资料。
2、设计并制作适用于实验的开关磁阻电机实验平台,并开展开关磁阻电机的基本结构和工作原理研究3、研究模糊神经网络的原理及应用,设计适用于开关磁阻电机换相逻辑辨识的模糊神经网络模型。
4、对模糊神经网络模型进行仿真,通过仿真实验分析模型的准确性、适用范围等因素。
5、设计实验验证环节,对模糊神经网络模型进行实际的应用和验证,并通过实验结果对模型的精度和可靠性进行分析和评估。
6、总结研究成果,对模糊神经网络方法用于开关磁阻电机换相逻辑辨识的应用前景及局限性进行探讨,提出应用建议和未来研究方向。
三、预期研究成果通过本研究,预期达到以下几个方面的成果:1、对开关磁阻电机的工作原理及其换相逻辑进行深入研究,深入了解开关磁阻电机的控制特性和工作原理。
2、掌握模糊神经网络的原理及应用,将其应用于开关磁阻电机的换相逻辑辨识中,并对其效果进行评估。
基于自适应模糊滑模的开关磁阻电机控制标题:基于自适应模糊滑模的开关磁阻电机控制引言:开关磁阻电机是一种新型的电动机,具有结构简单、体积小、重量轻、效率高等特点,被广泛应用于各个领域。
然而,由于其转矩与角度之间的非线性关系,传统的控制方法往往无法满足精确控制的需求。
因此,本文将介绍一种基于自适应模糊滑模的控制策略,以提高开关磁阻电机的性能和控制精度。
一、开关磁阻电机控制问题的挑战开关磁阻电机的控制问题主要包括非线性、不确定性和外部干扰等方面的挑战。
首先,开关磁阻电机的转矩与角度之间存在非线性关系,使得传统的线性控制方法难以精确控制。
其次,电机的参数变化、负载扰动等不确定性因素会进一步影响控制性能。
此外,外部环境的干扰也会对电机的运行产生不利影响。
二、自适应模糊滑模控制原理为了解决开关磁阻电机控制问题,本文提出了一种基于自适应模糊滑模的控制策略。
该策略结合了自适应控制、模糊控制和滑模控制三种方法,以提高系统的性能和鲁棒性。
在自适应模糊滑模控制中,首先采用自适应控制方法对电机的参数进行估计和补偿,以抵消参数变化和负载扰动带来的影响。
然后,利用模糊控制方法建立模糊逻辑规则,根据系统的输入和输出变量进行模糊推理,以获取控制规律。
最后,引入滑模控制方法,通过设计合适的滑模面,实现对电机转矩和角度的精确控制。
三、自适应模糊滑模控制的优势相较于传统的控制方法,基于自适应模糊滑模的控制策略具有以下优势:1. 鲁棒性强:自适应控制方法能够实时估计和补偿电机参数的变化和负载扰动,提高系统的鲁棒性和适应性。
2. 控制精度高:模糊控制方法通过建立模糊逻辑规则,综合考虑多个输入变量和输出变量,实现对电机的精确控制。
3. 抗干扰能力强:滑模控制方法通过引入滑模面,抑制外部干扰对系统的影响,提高系统的抗干扰能力。
四、实验验证与结果分析为了验证基于自适应模糊滑模的控制策略的有效性,进行了一系列的实验。
实验结果表明,该控制策略能够实现对开关磁阻电机的精确控制,提高系统的性能和控制精度。
基于模糊PID的开关磁阻电动机同步控制系统设计
李俊仕
【期刊名称】《微特电机》
【年(卷),期】2015(043)005
【摘要】针对开关磁阻电动机同步控制系统中存在功率输出不平衡等问题,在分析开关磁阻电动机数学模型及平均转矩在线计算方法的基础上,基于交叉耦合控制策略,提出了一种由速度反馈和转矩反馈组成的交叉耦合控制系统.并基于模糊PID控制策略,设计了一种模糊PID转矩控制器.同时给出了开关磁阻电动机同步控制系统的硬件结构和软件设计方法,最后进行了仿真实验.仿真结果验证了基于速度和转矩的双反馈交叉耦合控制系统的有效性和可行性,两台电机之间的转矩偏差减小、功率输出平衡,系统具有较好的鲁棒性.
【总页数】4页(P57-60)
【作者】李俊仕
【作者单位】包头职业技术学院,内蒙古014030
【正文语种】中文
【中图分类】TM352
【相关文献】
1.基于CAN总线的开关磁阻电动机双机同步控制技术研究 [J], 刘文田
2.基于C8051F500的开关磁阻电动机控制系统设计 [J], 姬起群;施火泉
3.基于新模型的双开关磁阻电动机同步控制方法 [J], 钟锐;徐宇柘;陆生礼
4.基于自适应模糊PID的钢板横剪生产线多电机同步控制系统设计 [J], 侯崇升
5.基于模糊PID控制器的多电机交叉耦合控制同步控制系统设计 [J], 李言民;苗欣;姜付杰
因版权原因,仅展示原文概要,查看原文内容请购买。
收稿日期:20010312改稿日期:2001-08-16基金项目:重庆市科委应用基础项目(项目编号:99CC16)设计分析开关磁阻电动机的模糊控制系统研究肖蕙蕙,李 山,万沛霖,何 莉(重庆工学院,重庆400050)Investigation of Fuzzy Control System on Switched Reluctance MotorXIAO Hui -hui,LI Shan,WANG Pei -ling ,HE Li (Chongqing Engineering College,Chongqing 400050,China)摘 要:阐述了开关磁阻电动机的模糊控制系统的设计方法,着重介绍了模糊控制器的设计原理,并采用MATLAB 软件对SR 电动机的模糊控制系统进行了仿真。
结果表明:将模糊控制技术应用于SR 电动机的调速系统中,可以改善动态性能,得到良好的调速性能。
关键词:开关磁阻电动机;模糊控制;仿真;MATLAB 软件中图分类号:TM 352 文献标识码:A 文章编号:1004-7018(2001)06-0040-03Abstract:This paper introduces the application of fuzzy control system on switched reluctance motor ,especially the design principle of the fuzzy controller.Besides a si mulation is carried out on s witched reluctance motor by using MATLAB software.The results show that the system can obtain good speed governor function and the dynamic state function can be improved after applying fuzzy control to s witched reluctance motor.Keywords:switched reluctance motor;fuzzy control;simulation;MATLAB1引 言开关磁阻(简称SR)电动机驱动系统是80年代中期问世的一种新型机电一体化的新颖调速系统,具有结构简单、调速范围广、运行可靠、控制方式灵活及效率较高等优点。
在SR 电动机中,定转子铁芯都是双凸极结构,磁场分布严重非线性,难以用一个精确的数学表达式描述,所以采用常规的线性控制方法,很难达到理想的控制效果。
而模糊控制是一种语言控制方法,勿需被控对象精确的数学模型,就能实现良好控制。
本文介绍了SR 电动机的模糊控制器的设计思路,并运用MATLAB 软件中的Simulink 动态仿真模块库对SR 控制系统进行了仿真。
2SR 电动机小信号线性化动态模型由文献[2]可知,当SR 电动机相电流为平顶电流波形时,其平均电磁转矩为:T av =mN r U 2s2 2r( off - 2)2- on L min -12 o f f - 2L max -L min(1)式中:m 电动机相数;N r 转子齿数;u s 电源电压; r 转速; on 绕组开通角; o ff 绕组关断角; 2 相电感上升的起始角;L min (L ma x ) 最小(最大)相电感。
由此可见,电磁转矩为控制参数u a 、 on 、 off 及受控变量 r 的函数,转矩T a 的全微分方程为:d T a =T a u s d u s + T a on d on + T a offd o ff + T ar d r (2)由于SR 电动机调速系统通常为稳速系统,对于某个稳态工作点附近小的扰动,根据非线性系统线性化理论,上式中各变量微分可用对应的增量来代替,因此可得出SR 电动机在工作点附近小信号线性化的电磁转矩方程为:T a =K u u s +K on on +K off off -K w r (3)同理可得SR 电动机在工作点附近小信号线性化的机械转矩方程为:T a =Jd rd t+D r + T L (4)式中:J 转动惯量;D 阻尼系数;T L 负载转矩。
SR 电动机在APC(角度位置控制)方式运行时,当某相绕组导通后,输入的角度控制命令必须经过一个转子极矩角 r 的延迟,直到该相再次导通时才被响应。
所以,若角度控制的输入量为 ~on 和为 ~o f f ,则有40微特电机 2001年第6期on = ~on (t - ) off = ~o ff (t - )(5)式中: 电机响应角度控制命令的延时平均值,一般为几毫秒。
由式(3)、(4)及(5)便构成了SR 电动机的时域小信号模型,并可将其转换为S 域模型:T a (s)=K u u s (s)+K on on (s)+ K off off (s)-K r (s )T ea (s)=J s r (s )+D r (s)+ T L (s) on (s)= ~on (s)e- soff (s )= ~off (s)e- s(6)对一定的外加直流电源,在转速为 r 时,由SR 电动机输出功率的仿真曲线得知:对任一起始开通角 on ,均存在一个使输出功率取最大值的最优关断角,且该角在20 24 范围内。
因此,为了简化控制,可以取 off 为一定值,在最优关断角范围内,可得SR 电动机系统的小信号动态结构图如图1所示。
图中:图1 SR 电动机小信号结构图G (s)=K n1+T s,K n 为速度反馈系数,T 为测速环节时间常数。
3模糊控制器的设计在该控制系统中,我们采用当前通用的按偏差及偏差变化率来进行设计的基本模糊控制器。
令偏差E 取7档:{E } ={NB E ,NM E ,NS E ,O E ,PS E ,PM E ,PB E }令偏差变化率E 取7档:{E} ={NB E ,NM E,NS E ,O E ,PS E ,PM E ,PB E}令控制量U 取7档:{U} ={NB u ,NM u ,NS u ,O u ,PS u ,P M u ,PB u }考虑到电机转速偏差范围大及高稳速精度的特点,我们将偏差变量的论域界定为21个等级,偏差变化率及控制量的论域界定为13个等级:{e} ={-10,-9, -1,0,1, ,10}{e} ={-6,-5, -1,0,1, ,6}{u } ={-6,-5, -1,0,1, ,6}综合考虑各种因素,并结合SR 电动机控制系统的特点,得到E ,E及U 的赋值如下:表1 偏差E 的赋值表eE (e )E-10-9-8-7-6-5-4-3-2-1012345678910PB E 10.90.80.40.2PM E 0.20.40.80.910.90.80.40.2PS E 0.20.710.70.2O E 0.510.5NS E 0.20.710.70.2NM E 0.20.40.80.910.90.80.40.2NB E0.20.40.80.91表2 偏差E的赋值表eE (e)E -6-5-4-3-2-10123456PB E 0.10.40.81.0PM E0.20.7 1.00.70.2PS E 0.9 1.00.70.2O E 0.51.00.5NS E 0.20.71.00.9NM E0.20.71.00.70.2NB E1.00.80.40.1在我们所设计的控制系统中,对于基速以下,多采用 电压PW M 控制 方式,通过调节控制电压的占空比 的大小,从而改变加在功率变换器上直流电压的大小,以达到改变转矩和转速的目的;对于基速以上,多采用 APC 控制 方式,当SR 电动机的功率一定时,随着导通角的增大转速增大而转矩却减小。
如表3 控制量U 的赋值表u U(u )U -6-5-4-3-2-1123456PB u 0.10.40.8 1.0PM u 0.20.7 1.00.70.2PS u 0.40.81.00.80.40.1O u 0.51.00.5NS u 0.10.40.81.00.80.4NM u 0.20.7 1.00.70.2NB u1.00.80.40.1果 off 固定,增大 on ,则导通角减小,转速减小,转矩增大。
为了简化控制,我们可以把两种情况下的控制规则合二为一,只是使输出时的符号及量化因子不同而已。
由此,我们可以给出下面的模糊控制规则状态表4。
41开关磁阻电动机的模糊控制系统研究表4 模糊控制规则状态表EU E NB E NM E NS E O E PS E PM E PB E NB E PB u PB u PB u PB u PM u O u O u NM E PB u PB u PB u PB u PM u O u O u NS E PM u PM u PM u PM u O u NS u NS u O E PM u PM u PS u O u NS u NM u NM u PS E PS u PS u O u NM u NM u NM u NM u PM E O u O u NM u NB u NB u NB u NB u PB EO uO uNM uNB uNB uNB uNB u我们采用文献[3]中所介绍的简化运算方法ARMCE 法,计算出最终所要的模糊控制表5。
在实际的在线应用过程中不用再计算,而只需根据模糊化后得到的(e,e )便可从表中查出唯一对应的控制量,从而大大地减少了在线控制的时间。
诚然,由于人们的经验知识并不可能完全充分地概括所有可能的情况,从而给控制精度造成一定的影响,因此还需要我们在实际应用中调节该控制表,从而达到更好的控制效果。
表5 模糊控制表Ue e-10-9-8-7-6-5-4-3-2-1012345678910-6666666555443322210000-5666666555443322100000-466666655543322100-1-1-1-1-3666655554332110-1-1-2-2-2-2-266655554431100-1-2-2-3-3-4-4-1665555444300-2-2-3-3-3-4-4-4-4055554444320-2-3-4-4-4-4-5-5-5-515444333220-1-3-4-4-4-5-5-5-5-6-62543322100-1-2-3-4-4-5-5-5-5-6-6-633322110-1-1-2-3-3-4-5-5-5-5-6-6-6-64111100-1-2-2-3-3-4-5-5-5-6-6-6-6-6-6500000-1-2-2-2-3-4-4-5-5-5-6-6-6-6-6-66-1-2-2-2-3-3-4-4-5-5-5-6-6-6-6-6-64系统仿真及结果分析利用上述方法对一台四相8/6极SR 电动机的模糊控制系统进行了仿真,样机参数为:定转子极数比:8/6,额定电压:280V,额定电流:7.9A,额定功率:2.2kW 。