开关磁阻电机速度控制
- 格式:pdf
- 大小:758.17 KB
- 文档页数:8
开关磁阻电机的原理及其控制系统开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。
具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。
定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2是二极管,是直流电源。
电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。
电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A 相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。
通过气隙的磁力线是弯曲的,此时磁路的磁导小于定、转子磁极轴线重合时的磁导,因此,转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用,使转子逆时针方向转动,转子磁极的轴线O1向定子A相磁极轴线OA趋近。
当OA和O1轴线重合时,转子己达到平衡位置,即当A相定、转子极对极时,切向磁拉力消失。
开关磁阻电机调速系统标准
关于开关磁阻电机调速系统的标准,通常会包括以下内容:
1. 电机性能标准:包括电机的额定功率、额定转速、额定电压、额定电流等参数的要求,以及电机的效率、功率因数、噪音和振动等性能指标的限制。
2. 控制系统标准:包括电机调速系统的控制器、传感器、接口和通信协议等方面的要求,确保系统能够稳定可靠地实现调速功能。
3. 安全标准:包括电机调速系统的安全保护装置、对电气和机械安全的要求,以及对人身和设备安全的保护措施等内容。
4. 环境适应性标准:包括电机调速系统在不同环境条件下的适应性要求,如温度、湿度、震动等方面的要求。
5. 能效标准:包括电机调速系统的能效要求,确保系统在不同负载和转速下能够实现高效节能的运行。
这些标准的制定和执行可以帮助确保开关磁阻电机调速系统的性能、安全性和可靠性,促进该技术在各个行业的应用和推广。
同时,
也有助于推动相关技术的研发和创新,促进整个电机调速系统行业的发展。
科技广场2010.50引言开关磁阻电动机(Sw i t ched R el unct ance M ot or )是80年代初随着电力电子、微电脑和控制技术而迅猛发展起来的一种新型电机驱动系统,具有结构简单、启动及低速时转矩大、电流小,高速时恒功率区范围宽,在宽广转速和功率范围内都具有高输出和高效率,而且有很好的容错能力,应用潜力巨大,已经引起各国学者和企业界的广泛关注。
1开关磁阻电动机工作原理开关磁阻电动机(以下简称SR 电动机)的转矩具有磁阻性质,其运行原理遵循“磁阻最小原理”———磁通总是要沿磁阻最小的路径闭合,因磁场扭曲而产生切向磁拉力。
电机为了增加出力而设计成双凸极结构,转子仅由硅钢片叠压而成,既无绕组也无永磁体。
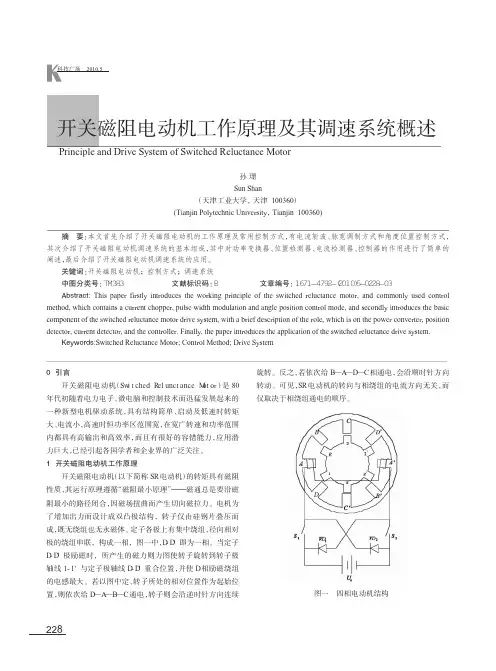
定子各极上有集中绕组,径向相对极的绕组串联,构成一相,图一中,D -D '即为一相。
当定子D -D '极励磁时,所产生的磁力则力图使转子旋转到转子极轴线1-1'与定子极轴线D -D '重合位置,并使D 相励磁绕组的电感最大。
若以图中定、转子所处的相对位置作为起始位置,则依次给D —A —B —C 通电,转子则会沿逆时针方向连续旋转。
反之,若依次给B —A —D —C 相通电,会沿顺时针方向转动。
可见,SR 电动机的转向与相绕组的电流方向无关,而仅取决于相绕组通电的顺序。
开关磁阻电动机工作原理及其调速系统概述Principleand Drive System of Switched Reluctance Motor孙珊Sun Shan(天津工业大学,天津100360)(Tianjin Polytechnic University ,Tianjin 100360)摘要:本文首先介绍了开关磁阻电动机的工作原理及常用控制方式,有电流斩波、脉宽调制方式和角度位置控制方式,其次介绍了开关磁阻电动机调速系统的基本组成,其中对功率变换器、位置检测器、电流检测器、控制器的作用进行了简单的阐述,最后介绍了开关磁阻电动机调速系统的应用。
开关磁阻电机控制系统摘要:开关磁阻电机(SRM)是一种新型调速电机,是继变频调速系统、无刷直流电动机调速系统的最新一代调速系统。
它的结构简单坚固,调速范围宽,系统可靠性高,可以进一步提升系统的安全稳定性。
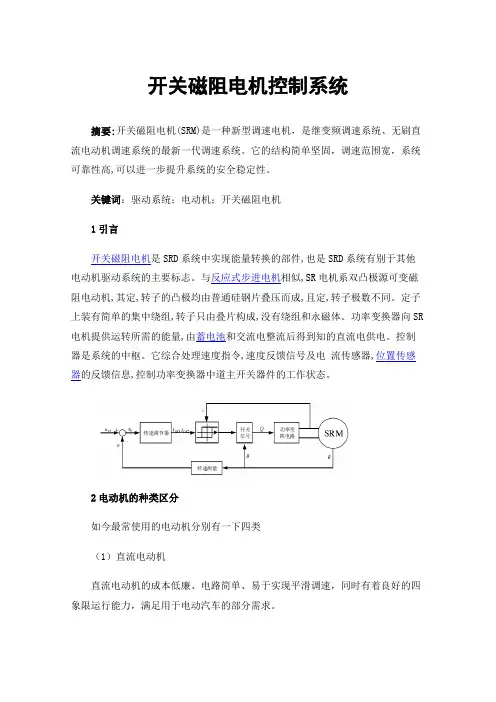
关键词:驱动系统;电动机;开关磁阻电机1引言开关磁阻电机是SRD系统中实现能量转换的部件,也是SRD系统有别于其他电动机驱动系统的主要标志。
与反应式步进电机相似,SR电机系双凸极源可变磁阻电动机,其定,转子的凸极均由普通硅钢片叠压而成,且定,转子极数不同。
定子上装有简单的集中绕组,转子只由叠片构成,没有绕组和永磁体。
功率变换器向SR 电机提供运转所需的能量,由蓄电池和交流电整流后得到知的直流电供电。
控制器是系统的中枢。
它综合处理速度指令,速度反馈信号及电流传感器,位置传感器的反馈信息,控制功率变换器中道主开关器件的工作状态。
2电动机的种类区分如今最常使用的电动机分别有一下四类(1)直流电动机直流电动机的成本低廉、电路简单、易于实现平滑调速,同时有着良好的四象限运行能力,满足用于电动汽车的部分需求。
然而传统直流电机存在机械换向器和电刷,运行中会产生电火花和电磁辐射,从而干扰到车辆的电子控制系统,不利于车联网体系的建立。
除此之外,机械换向器有着极为复杂的结构,难以简单制造且使车速到达高速。
(2)交流感应电机交流感应电机一般采用六用鼠笼型的结构,对比与其他电机,三相鼠笼型电动机成本较低,运行效率高,拥有良好的可靠性的同时便于维修的优点,而且体积小。
通过一定的控制策略,,交流感应电机也可以实现类似于直流电机的良好调速特性。
但与此同时,交流感应电机用电量大,在使用过程中发热严重,调速性能不佳,控制系统复杂且需要一定的成本。
(3)无刷永磁电机永磁电机是一种高性能新兴电机。
永磁无刷直流电机结构中不含换向器和电刷,这样一来永磁电机一方面继承了直流电机优秀的调速性能又避免了机械换向器和电刷带来的负面影响。
相较于此前介绍的几种电机,永磁电机有更高的功率和转矩,极限转速高、制动性能好。
开关磁阻电机工作原理开关磁阻电机是一种新型的电机,它采用了开关磁阻原理,具有结构简单、效率高、噪音低等优点,因此在工业生产中得到了广泛的应用。
那么,开关磁阻电机是如何工作的呢?接下来,我们将深入探讨开关磁阻电机的工作原理。
首先,我们需要了解开关磁阻原理。
开关磁阻原理是指通过改变磁路的磁阻来控制电机的运动。
在开关磁阻电机中,磁路由磁铁、磁导体和空气间隙组成。
通过改变磁导体的导磁性能,可以改变磁路的磁阻,从而控制电机的运动。
这种原理使得开关磁阻电机具有了结构简单、响应速度快的特点。
其次,开关磁阻电机的工作原理是基于磁阻变化来实现的。
当电流通过磁导体时,磁导体的导磁性能会发生变化,从而改变磁路的磁阻。
通过控制电流的大小和方向,可以实现对磁路磁阻的精确控制。
当磁路的磁阻发生变化时,磁场的分布也会发生变化,从而产生了磁力,推动电机的转子运动。
在开关磁阻电机中,通常会采用开关元件来控制电流的大小和方向。
通过控制开关元件的通断,可以实现对电流的精确控制,从而实现对磁路磁阻的精确控制。
这种精确控制使得开关磁阻电机具有了高效率、高精度的特点。
此外,开关磁阻电机还具有了响应速度快、噪音低的特点。
由于开关磁阻电机采用了数字化控制,可以实现对电流的快速调节,从而实现了响应速度快的特点。
同时,由于开关磁阻电机不需要传统的机械换向装置,因此噪音也大大降低了。
综上所述,开关磁阻电机是一种利用开关磁阻原理实现运动控制的新型电机。
它具有了结构简单、效率高、响应速度快、噪音低的特点,因此在工业生产中得到了广泛的应用。
希望通过本文的介绍,能够让大家对开关磁阻电机的工作原理有一个更加深入的了解。
开关磁阻电机控制原理首先,让我们来了解SRM的工作原理。
SRM由铁心、定子和转子组成,其中定子是由若干个相间的线圈组成,而转子则是由多个齿隙组成。
当施加电流到定子线圈时,线圈产生磁场并吸引转子上的磁极,使得转子转动。
与其他类型的电机相比,SRM没有永磁体,因此其转子结构更简单。
1. 电流控制(Current Control):SRM的电流控制是通过施加电流来控制电机的转矩和速度。
首先需要测量电机的位置和速度,以便根据实际情况调整电流。
通常使用位置传感器(如霍尔传感器)来测量转子位置,然后通过计算得到电机的速度。
基于这些测量结果,控制器可以确定如何调整电流的大小和方向,以实现所需的转矩和速度。
在电流控制过程中,还需要考虑到电机的特性和限制。
例如,如果电流过大,可能会导致电机过热或损坏。
因此,控制器需要根据电机的额定电流和温度来限制电流的大小。
此外,还需要考虑到电机的响应时间,以确保电流调整的快速性和准确性。
2. 位置控制(Position Control):SRM的位置控制是用于确定和保持转子的精确位置。
在SRM中,转子的位置是由电流和磁场之间的相对位置决定的。
通常使用位置传感器(如霍尔传感器或编码器)来测量转子位置,并将这些位置信息传递给控制器。
控制器使用这些位置信息来调整电流的大小和方向,以将转子移动到所需的位置。
在位置控制过程中,控制器需要根据转子的位置误差来决定调整电流的方向和大小。
通常使用位置反馈控制算法(如PID控制)来实现这一目标。
控制器将位置误差和其他参数(如转子惯性、负载和电机特性)纳入考虑,并根据算法的要求来调整电流。
在实际应用中,位置控制通常需要考虑到转子位置的精确性以及抗干扰和鲁棒性等问题。
总结起来,开关磁阻电机的控制原理主要包括电流控制和位置控制两个方面。
电流控制用于调整电机的转矩和速度,而位置控制用于确定和保持转子的精确位置。
控制器根据电机的特性和限制,使用合适的控制算法来实现所需的控制效果。
开关磁阻电机的原理及其控制系统开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。
具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。
定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2是二极管,是直流电源。
电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。
电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。
通过气隙的磁力线是弯曲的,此时磁路的磁导小于定、转子磁极轴线重合时的磁导,因此,转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用,使转子逆时针方向转动,转子磁极的轴线O1向定子A相磁极轴线OA趋近。
当OA和O1轴线重合时,转子己达到平衡位置,即当A相定、转子极对极时,切向磁拉力消失。
开关磁阻电机控制器的优化调整电路及优化方法开关磁阻电机是一种新型的电动机控制技术,其在能效高、响应快、可靠性强等方面具有明显的优势。
为了进一步提升开关磁阻电机的性能,优化调整电路的设计与方法成为关键。
本文将从电机控制器的优化调整电路以及优化方法两个方面进行深入的探讨。
一、开关磁阻电机控制器的优化调整电路为了实现对开关磁阻电机的有效控制,优化调整电路的设计至关重要。
以下是几种常见的优化调整电路:1. 电流传感电路:电流传感电路主要用于检测电机的工作电流,通过采集电流信号可以实时监测电机的工作状态。
在优化调整电路中,合理设计电流传感电路可以提高电机的工作效率和稳定性。
2. 驱动电路设计:驱动电路是实现对电机正常工作的基础,好的驱动电路设计可以保证电机的工作效率和稳定性。
在优化调整电路中,应采用高质量的驱动电路,确保电流和电压的准确控制,提高电机的响应速度和效能。
3. 电源滤波电路:电源滤波电路主要是为了减小电机系统中的电源噪声和干扰。
在优化调整电路中,采用有效的电源滤波电路可以提高电机的工作质量和稳定性,减小不必要的噪声干扰。
4. 温度保护电路:温度保护电路可以监测电机的工作温度,并在超过安全温度范围时及时采取保护措施。
在优化调整电路中,合理设计温度保护电路可以避免电机过热而损坏,提高电机的可靠性和寿命。
5. 控制信号采集电路:控制信号采集电路用于采集外部控制信号,通过与电机的工作状态相匹配,实现对电机的控制。
在优化调整电路中,合理设计控制信号采集电路可以保证电机的精准控制,提高电机的响应速度和稳定性。
二、开关磁阻电机控制器的优化方法在设计开关磁阻电机控制器的过程中,优化方法是实现高性能电机控制的重要手段。
以下是几种常用的优化方法:1. 目标函数优化:通过建立适当的目标函数,利用数学优化方法对电机控制器的参数进行调整,以达到设计要求。
目标函数可以包括电机的工作效率、响应速度、功耗等指标,综合考虑各种因素进行全局优化。
一种开关磁阻电机控制方法开关磁阻电机是一种新型的电机控制技术,它具有结构简单、运行可靠、适应性强等优点。
下面将介绍一种开关磁阻电机的控制方法。
开关磁阻电机控制方法主要包括三个方面:起动控制、运行控制和保护控制。
首先是起动控制。
在开关磁阻电机起动过程中,为了保证电机能够正常启动并达到设定的运行状态,需要进行起动控制。
起动控制主要包括磁通调节和相序控制两个方面。
磁通调节是通过改变电机磁通来控制电机的起动过程。
在起动时,电机的转子尚未转动,此时可以通过改变励磁电流的大小,改变磁通的大小。
增大磁通可以增加电机的转矩,使得电机起动更加顺利。
相应的,减小磁通可以减小电机的转矩,适用于负载较轻的情况。
相序控制是通过改变电机绕组的相序来控制电机的起动过程。
在三相电源供电的情况下,改变相序可以改变电流的相位,从而改变电机的转速。
通过调节相序,可以控制电机的起动速度和转向。
其次是运行控制。
在电机起动成功后,需要进行运行控制以保证电机能够稳定运行。
运行控制主要包括速度调节、转矩控制和回路控制三个方面。
速度调节是通过改变电机的供电频率和电压来控制电机的转速。
增加供电频率和电压可以提高电机的转速,降低供电频率和电压可以降低电机的转速。
通过不断调节电机的供电频率和电压,可以实现对电机转速的精确控制。
转矩控制是通过改变电机的励磁电流和绕组的相序来控制电机的转矩。
增大励磁电流和改变相序可以增加电机的转矩,减小励磁电流和改变相序可以减小电机的转矩。
通过调节电机的励磁电流和相序,可以实现对电机转矩的精确控制。
回路控制是通过改变电机回路的连接方式来控制电机的运行状态。
例如,可以通过改变电机绕组的连接方式,将电机由星形连接改为三角形连接,从而改变电机的运行特性。
最后是保护控制。
为了保证开关磁阻电机的安全运行,需要进行保护控制。
保护控制主要包括过载保护、欠压保护和过热保护三个方面。
过载保护是通过监测电机的电流来判断电机是否超过额定负载。
SRD开关磁阻电机驱动系统控制原理SRD (Switched Reluctance Drive) 开关磁阻电机驱动系统是一种采用交绕、直流偏置磁通和数字控制技术的新型电机驱动系统。
相比于传统的电机驱动系统,SRD系统具有简单的结构、高效的转换特性和灵活的控制模式。
本文将通过以下几个方面介绍SRD开关磁阻电机驱动系统的控制原理。
1.SRD系统的基本结构2.SRD系统的工作原理SRD系统在运行时,通过控制定子线圈的电流方向和大小来控制电机的转矩和转速。
当定子线圈通电时,在铁心片之间产生磁场,吸引转子中的铁心片。
通过改变定子线圈的电流方向和大小,可以控制吸引和排斥转子铁心片的力,从而控制电机的转矩。
3.SRD系统的控制模式SRD系统采用数字控制技术,可以灵活地选择不同的控制模式。
常见的控制模式包括速度闭环控制、转矩闭环控制和位置闭环控制。
速度闭环控制通过测量电机的转速,并根据设定值调整电流的大小和方向来控制转速。
转矩闭环控制通过测量电机的转矩,并根据设定值调整电流的大小和方向来控制转矩。
位置闭环控制通过测量电机的位置,并根据设定值调整电流的大小和方向来控制位置。
4.SRD系统的控制策略SRD系统采用先进的控制策略,如模糊控制、PID控制和自适应控制。
在速度闭环控制模式下,可采用PID控制策略,根据转速误差和误差的变化率来调整电流的大小和方向。
在转矩闭环控制模式下,可采用自适应控制策略,根据转矩误差和电流的变化率来调整电流的大小和方向。
在位置闭环控制模式下,可采用模糊控制策略,根据位置误差和电流的变化率来调整电流的大小和方向。
5.SRD系统的优势SRD系统相比传统的电机驱动系统具有以下几个优势:首先,SRD系统结构简单,易于制造和维护。
其次,SRD系统具有高效的转换特性,能够实现高转矩密度和高效能的特点。
此外,SRD系统的数字控制技术使其具有灵活的控制模式和优秀的控制性能。
总结:SRD开关磁阻电机驱动系统通过控制定子线圈的电流方向和大小来控制电机的转矩和转速,并采用数字控制技术实现灵活的控制模式。
开关磁阻电机的原理及其控制系统1.工作原理:开关磁阻电机是一种以磁阻为主要工作原理的电机。
它利用电流在磁阻元件中产生的磁阻变化,从而实现驱动电机转动。
该电机主要由定子和转子两部分组成。
定子中心构造有磁阻元件(如磁阻电阻块或磁阻隐藏产生器),制造磁场,而转子是磁场作用下的动力元件。
电机通过改变定子和转子之间的磁阻关系来实现转矩调速。
工作过程如下:(1)当电机通电时,定子中的磁场会激励转子周围的物质,并产生磁阻。
(2)通过改变通电线圈的电流方向,可以改变磁场中的磁阻分布和大小。
(3)转子在磁场影响下,会发生转动,转动角度和方向与磁阻的变化有关。
(4)控制系统通过改变电流的大小和方向,以调节磁场中的磁阻,从而控制电机的转速和转矩。
2.控制系统:(1)电源供应:控制系统需要提供稳定的电源供应,以保证电机正常工作。
可以采用直流电源或交流电源供电,根据实际要求进行选择。
(2)电流控制:电流控制是开关磁阻电机的关键。
通过改变电流的大小和方向,可以实现对电机的转速和转矩的调节。
可以采用PID控制算法等来实现电流的闭环控制。
(3)角度控制:角度控制是实现电机转动角度的控制手段。
可以通过位置传感器等装置来检测电机转子的位置,然后通过控制系统来调整电流方向和大小,从而实现电机转子在指定角度上停留或转动。
(4)速度控制:速度控制是根据实际需求来调节电机转速的手段。
可以通过改变电流的大小和方向,或者改变供电频率等方式来实现速度的调节。
总结:开关磁阻电机是一种利用磁阻变化实现驱动的电机,通过改变电流的大小和方向,可以实现对电机的转速和转矩的调节。
其控制系统主要包括电源供应、电流控制、角度控制和速度控制等部分。
利用这些控制手段,可以实现对开关磁阻电机的精确控制,满足各种实际应用需求。
Journal of Electrical Engineering 电气工程, 2016, 4(1), 55-62Published Online March 2016 in Hans. /journal/jee/10.12677/jee.2016.41008Speed Control Strategy of SwitchedReluctance MotorZhou Du1,2, Dingxiang Wu2,3, Lijun Tang1,21School of Physics and Electronic Sciences, Changsha University of Science & Technology, Changsha Hunan2Hunan Province Higher Education Key Laboratory of Modeling and Monitoring on the Near-EarthEletromagnetic Environments, Changsha Hunan3Billion Set Electronic Technology Co, Ltd., Changsha HunanReceived: Mar. 1st, 2016; accepted: Mar. 19th, 2016; published: Mar. 24th, 2016Copyright © 2016 by authors and Hans Publishers Inc.This work is licensed under the Creative Commons Attribution International License (CC BY)./licenses/by/4.0/AbstractAimed at research on starting mode and speed control of switched reluctance motor speed control system, a two-phase starting is adopted to start the electric, in order to increase the torque and reduce the torque ripple. A fuzzy adaptive PID control algorithm is proposed, and a switched re-luctance motor speed control system with STM32 + FPGA as the main controller is designed, ap-plying current chopping in low speed and angle position control mode in high speed, which has a certain effect on solving the problems of high overshoot, slow dynamic response and low accuracy.The experimental results show that the precision of the system speed is within 10 r/min, and the maximum overshoot is 15 r/min.KeywordsSwitched Reluctance Motor, Torque Ripple, Fuzzy Adaptive Tuning PID开关磁阻电机速度控制杜舟1,2,吴定祥2,3,唐立军1,21长沙理工大学物理与电子科学学院,湖南长沙2近地空间电磁环境监测与建模湖南省普通高校重点实验室,湖南长沙3长沙亿旭机电科技有限公司,湖南长沙杜舟等收稿日期:2016年3月1日;录用日期:2016年3月19日;发布日期:2016年3月24日摘要针对开关磁阻电机的调速控制系统的起动方式和速度控制开展研究,采用两相绕组通电起动的方式,以增大转矩、减小转矩脉动。
提出了模糊–自适应整定PID控制算法,并以STM32 + FPGA为主控制器,应用低速电流斩波、高速角度位置控制方式设计了开关磁阻电机调速系统。
对于解决超调量高、动态响应慢的不足、精确度不高的问题有一定的效果。
实验结果表明,系统转速的精确度在10 r/min之内,最大超调量为15 r/min。
关键词开关磁阻电机,转矩脉动,模糊–自适应整定PID1. 引言开关磁阻电机具有可靠性高,起动电流小,控制系统结构简单,调速性能优异的优点,在电动车、纺织机、航空工业及军事工业有广泛应用。
周涛[1]设计了以ATmega 8单片机作为主控制器芯片,常规PID算法作为控制算法的电动自行车用开关磁阻电机驱动系统。
刘芸芸[2]在开关磁阻电机调速系统中使用16位单片机芯片80C196KC为核心控制单元,采用常用的模糊控制作为控制方法。
宋伟官[3]在基于DSP的开关磁阻电机控制系统中使用神经网络控制作为控制方式。
依据电机运行过程中的各阶段物理量的变化,结合实际所需,本系统对电机的起动过程、低速和高速的每个状态都分别采用最优化的控制策略。
2. 开关磁阻电动机结构及原理开关磁阻电机内部由定子和转子构成,都是凸极结构,由导磁性能良好的硅钢片冲压而成。
定子和转子之间存在着很小的缝隙,转子在定子内可以自由转动,内部结构如图1所示。
开关磁阻电机的工作机理[4]是:磁通总是沿磁导最大的路径闭合。
当定子齿和转子齿中心线不重合时,磁导不为最大,磁场产生磁拉力,拉动转子转到磁导最大的位置,即定子齿和转子齿中心线重合处。
3. 开关磁阻电动机起动方式常用的起动方式是单相绕组通电起动方式[5],当转子处于不同的位置时,电动机所获得的转矩大小不一样的。
设定各相转子位置角的参考点为A相电感最小的地方,可以得到电动机的单相绕组通电的转矩特性[6],如图2所示。
单相绕组通电起动方式的最小起动转矩是两相转矩特性曲线相交点处的转矩,当负载转矩大于最小起动转矩时,电机有可能由于带负载能力不足致使起动失败。
为尽量避免此情况,使用两相绕组通电方式起动,电机在任何时候都有两相绕组同时通电[7],以提高电机起动转矩和减小起动转矩脉动。
忽略磁耦合,两相绕组同时通电起动方式的转矩可近似地认为是由单相通电的各转矩大小相加所得,如图3所示。
两相绕组通电起动方式的起动转矩的最小值等于单相起动方式起动转矩的最大值,带负载能力大大增强,且最大起动转矩与最小起动转矩的比值明显减小,说明转矩脉动减小,同时,若电机所带负载转矩不变时,双相绕组通电起动方式所需的起动电流也要小于单相起动方式的起动电流。
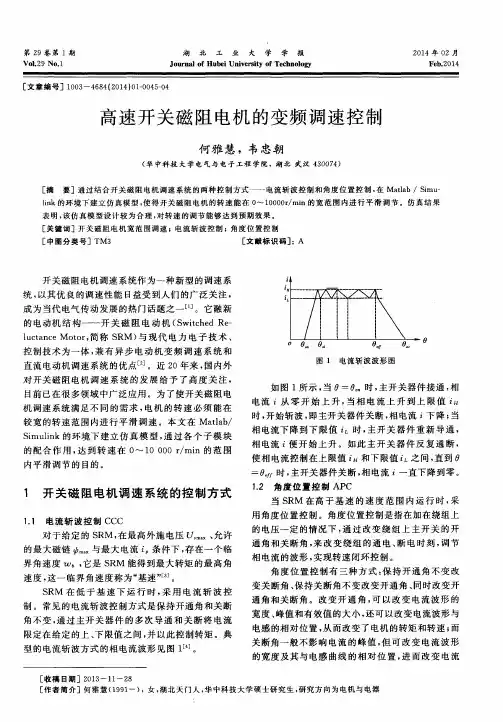
杜舟等E sFigure 1.Construction of switched reluctancemotor图1. 开关磁阻电机结构Figure 2. Torque characteristics of single phase startingmode图2. 单相起动方式转矩特性Figure 3.Torque characteristics of two phase startingmode图3. 两相起动转矩特性4. 控制方式选择开关磁阻电机的控制参数主要有开通角、关断角、主电路电压和相电流。
常用的调速控制方式有:电流斩波控制方式、角度位置控制方式和电压斩波控制方式[8],均有各自的优缺点和适用状态。
4.1. 起动及低速阶段控制方式开关磁阻电机在起动或低速(额定转速的40%以下)运行时,转速较慢,运动电动势较小,di/dt很大,为防止可能出现的过电流和较大电流尖峰,本系统采取电流斩波方式加以限制。
功率管开关导通,电流上升,当电流上升至斩波电流的上限值时,切断绕组电流,电流下降,当电流降至斩波电流的下限值时,功率管开关再次导通,电流再次上升。
反复通断功率管开关,形成了在给定电流值附近上下波动的斩波电流。
杜舟等4.2. 高速阶段控制方式电机在高速运行时,旋转电动势比较大,相电流比较小,不适合再使用电流斩波方式。
在电压、开通角θon、关断角θoff不变的情况下,随着转速ω的增加,磁链和相电流以ω−1下降,转矩以ω−2下降[9]。
为获得尽量高的效率和较大的转矩范围,使用角度控制方式进行控制,通过改变开通角和关断角的数值实现调速功能。
实际运用中,先优化固定关断角,然后闭环调节开通角,对于调速范围较宽的情况,分段优化固定关断角,分别对各段加以调节控制。
4.3. 控制算法的实现开关磁阻电机调速的目的是使电机快速达到期望的转速,广泛使用的控制算法是常规PID控制和模糊控制。
常规PID控制的优点是算法简单、可靠性高,不足是超调量高,动态响应慢。
模糊控制对于开关磁阻电机的非线性有着较强的适应性,但是不能达到较高的精度。
针对这些问题,本系统采用种模糊自适应整定PID控制算法,以获得较高的稳定性和精确度。
模糊自适应整定PID控制算法根据模糊控制规则在线整定比例因子Kp、Ki和Kd,使系统的性能达到令人满意的水平。
该算法以误差e和误差变化ec率作为输入,利用模糊控制规则在线对PID参数进行修改,模糊自适应PID控制器结构如图4所示。
PID参数模糊自适应整定是在运行过程中通过不断检测e和ec,根据模糊控制原理来对PID的3个参数进行在线修改。
误差e和误差变化率ec的基本论域是[−3,+3],将其离散成7个等级,即[−3,−2,−1,0,+1, +2,+3],本系统将基本论域定义为负大[NB],负中[NM],负小[NS],零[Z],正小[PS],正中[PM],正大[PB]7个语言变量,然后由e和ec的隶属函数得到相应的模糊变量。
系统针对Kp、Ki和Kd 3个参数建立了合适的模糊控制表,以Kp为例,模糊控制规则见表1。
Figure 4. Fuzzy adaptive PID controller图4. 模糊自适应PID控制器Table 1.Fuzzy rule of Kp表1. Kp模糊规则表NB PB PB PM PM PS Z ZNM PB PM PM PS PS Z NSNS PM PM PM PS Z NS NSZ PM PM PS Z NS NM NMPS PS PS Z NS NS NM NMPM PS Z NS NM NM NM NBPB Z Z NM NM NM NB NB杜舟等5. 电机速度控制方案实现5.1. 硬件设计在开关磁阻电机速度控制系统设计中,通常使用单片机、数字信号处理器等高速性能器件完成设计。