一类二维抛物型方程的ADI格式
- 格式:doc
- 大小:22.00 KB
- 文档页数:2
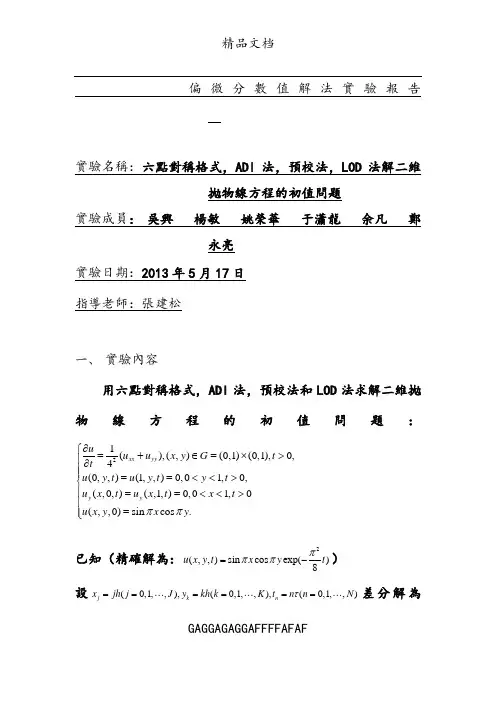
GAGGAGAGGAFFFFAFAF偏微分數值解法實驗報告實驗名稱:六點對稱格式,ADI 法,預校法,LOD 法解二維拋物線方程的初值問題實驗成員: 吳興 楊敏 姚榮華 于瀟龍 余凡 鄭永亮實驗日期:2013年5月17日 指導老師:張建松一、 實驗內容用六點對稱格式,ADI 法,預校法和LOD 法求解二維拋物線方程的初值問題:21(),(,)(0,1)(0,1),0,4(0,,)(1,,)0,01,0,(,0,)(,1,)0,01,0(,,0)sin cos .xx yy y y u u u x y G t t u y t u y t y t u x t u x t x t u x y x y ππ∂⎧=+∈=⨯>⎪∂⎪⎪==<<>⎨⎪==<<>⎪=⎪⎩已知(精確解為:2(,,)sin cos exp()8u x y t x y t πππ=-)設(0,1,,),(0,1,,),(0,1,,)j k n x jh j J y kh k K t n n N τ======差分解為GAGGAGAGGAFFFFAFAF,nj k u ,則邊值條件為:0,,,0,1,1,0,0,1,,,,0,1,,n n k J k nn n nj j j K j K u u k K u u u u j J-⎧===⎪⎨===⎪⎩初值條件為:0,sin cos j k j k u x y ππ=取空間步長12140h h h ===,時間步長11600τ=網比。
1: ADI 法:由第n 层到第n+1层计算分成两步:先先第n 層到n+1/2層,對uxx 用向后差分逼近,對uyy 用向前差分逼近,對uyy 用向后差分逼近,于是得到了如下格式:11112222,,1,,1,,1,,1221222,,2-22=21()n n n n n n n nj kj kj kj k j kj k j k j k n nx j k y j k hh hτδδ+++++-+-+-+-+=+uu uuuu u u (+) (1)u u1111111222,,1,,1,,1,,12212212,,2-22=21()n n n n n n n n j kj kj kj k j kj k j k j k n n x j k y j k hh hτδδ++++++++-+-++-+-+=+u u uuuu u u (+) (2)u u其中j,k=1,2,…,M-1,n=0,1,2,…,上标n+1/2表示在t=tn+1/2+(n+1/2)τ取值。
抛物方程的ADI方法的几点说明摘要:在此文中,我们介绍了抛物方程的几种新的ADI方法。
从这些方法的构建可以看出, ADI法是一个开放式的算法,具有很强的可重构性。
进而启发我们将日常学习到的理论知识举一反三地应用到实际生产中去。
关键词:ADI方法高精度变系数高维方程产生于上世纪五十年代的交替方向隐式(ADI)方法[1,2,3],在数值数学研究与应用领域占有十分重要的地位。
该方法能把多维问题化为一系列的一维问题处理,而且一维问题所要求解的方程组为三对角的,很容易使用熟知的追赶法在计算机上实现。
该方法具有运算速度快、存储量小、无条件稳定等优点,几十年来一直受到人们的青睐。
下面我们将根据抛物方程的不同形式和实际问题的需求,介绍几种新型的交替方向隐格式。
1 传统的ADI法第一个ADI法是Peaceman和Rachford[1]于1955年提出的。
为了显示其方法,考虑如下的二维热传导方程:4 结语在这篇文章中,依据高等教材中交替方向隐格式的基本算法理论,我们介绍了抛物方程几种新型交替方向隐格式。
从这些差分格式的构建不难看出,交替方向隐格式法不但具有运算速度快、存储量小、无条件稳定等优点,而且还是一种开放式的数值算法,具有很强的可重构性,进而启发我们将日常学习到的理论知识举一反三地应用到实际生产中去。
参考文献[1] Peaceman D W,Rachford Jr H H,The numerical solution of parabolic and ellipfic differential equations, J SIAM,3,1955:28-41.[2] 李荣化,刘播,微分方程数值解法[M].4版.北京:高等教育出版社,2009.[3] 胡健伟,汤怀民.微分方程数值方法[M].北京:科学出版社,2000.[4] 闵涛,张海燕,周宏宇,等.二维变系数热传导方程初边值问题的交替方向隐格式[J].西安工业大学学报,2007,27(2).[5] 葛永斌,田振夫,吴文权.高维热传导方程的高精度交替方向隐式方法[J].上海理工大学学报,2007(29):55-58.[6] 朱琳琳.抛物方程的交替方向隐格式[D].河南师范大学,2007.。
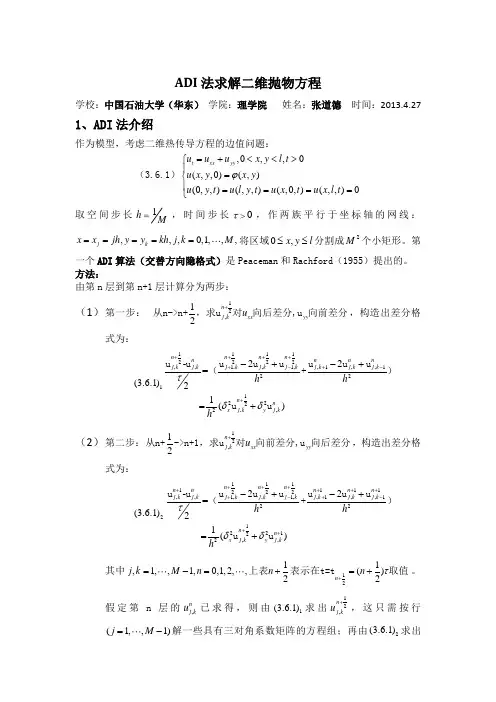
ADI 法求解二维抛物方程学校:中国石油大学(华东) 学院:理学院 姓名:张道德 时间:2013.4.271、ADI 法介绍作为模型,考虑二维热传导方程的边值问题:(3.6.1),0,,0(,,0)(,)(0,,)(,,)(,0,)(,,)0t xx yy u u u x y l t u x y x y u y t u l y t u x t u x l t ϕ=+<<>⎧⎪=⎨⎪====⎩取空间步长1hM,时间步长0,作两族平行于坐标轴的网线:,,,0,1,,,j k x x jh y y kh j k M =====将区域0,x y l ≤≤分割成2M 个小矩形。
第一个ADI 算法(交替方向隐格式)是Peaceman 和Rachford (1955)提出的。
方法:由第n 层到第n+1层计算分为两步:(1) 第一步: 12,12n j k xx yy u +从n->n+,求u 对向后差分,u 向前差分,构造出差分格式为:1(3.6.1)11112222,,1,,1,,1,,1221222,,2-22=21()n n n n n n n n j kj kj kj k j kj k j k j k n n x j k y j k hhhτδδ+++++-+-+-+-+=+uu uuuu u u (+)u u(2) 第二步:12,12n j k xx yy u +从n+->n+1,求u 对向前差分,u 向后差分,构造出差分格式为:2(3.6.1)1111111222,,1,,1,,1,,12212212,,2-22=21()n n n n n n n n j kj kj kj k j kj k j k j k n n x j k y j k hh hτδδ++++++++-+-++-+-+=+uu uuuu u u (+)u u其中1211,1,,1,0,1,2,,()22n j k M n n n τ+=-=+=+上表表示在t=t 取值。
ADI隐式交替法三种解法及误差分析(一般的教材上只说第一种)理论部分参看孙志忠:偏微分方程数值解法注意:1.最好不要直接看程序,中间很多公式很烦人的(一定要小心),我写了两天,终于写对了。
2.中间:例如r*(u(i-1,m1,k)+u(i+1,m1,k))形式写成分形式:r*u(i-1,m1,k)+r*u(i+1,m1,k)后面会出错,我也不是很清楚为什么,可能由于舍入误差,或者大数吃掉小数的影响。
3.下面有三个程序4.具体理论看书,先仔细看书(孙志忠:偏微分方程数值解法)或者网上搜一些理论。
Matlab程序:1.function [u u0 p e x y t]=ADI1(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u0(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))]; u0([1 m2+1],j,k)=[exp(0.5*x(j)-t0(k)) exp(0.5*(1+x(j))-t0(k))];endendr=h2/(h1*h1);r1=2*(1-r);r2=2*(1+r);for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r2*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+...h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r2*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend2.function [u p e x y t]=ADI2(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(D'Yakonov交替方向隐格式)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u'(i,j,k)(引入的过渡层),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;y=(0:m2)*h1+0;t=(0:n)*h2+0;t0=(0:n)*h2+1/2*h2;%定义t0是为了f(x,y,t)~=0的情况% for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));%编程时-t0(k)写成了+t0(k),导致错误;endendend%初始条件for i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endend%边界条件for k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))];endendr=h2/(h1*h1);r4=1+r;r5=r/2;for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=r4*u(i,[1 m1+1],k+1)-r5*(u(i-1,[1 m1+1],... k+1)+u(i+1,[1 m1+1],k+1));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendr1=r-r*r;r2=2*(r-1)*(r-1);r3=r*r/2;for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=2*r4*ones(1,m1-1);d(1)=r*u0(i,1,k)+r1*(u(i-1,2,k)+u(i,1,k)+u(i+1,2,k)+...u(i,3,k))+r2*u(i,2,k)+r3*(u(i-1,1,k)+...u(i+1,1,k)+u(i-1,3,k)+u(i+1,3,k))+2*h2*f(i,2,k);for l=2:m1-2d(l)=r1*(u(i-1,l+1,k)+u(i,l,k)+u(i+1,l+1,k)+...u(i,l+2,k))+r2*u(i,l+1,k)+r3*(u(i-1,l,k)+...u(i+1,l,k)+u(i-1,l+2,k)+u(i+1,l+2,k))+2*h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r1*(u(i-1,m1,k)+u(i,m1-1,k)+...u(i+1,m1,k)+u(i,m1+1,k))+r2*u(i,m1,k)+...r3*(u(i-1,m1-1,k)+...u(i+1,m1-1,k)+u(i-1,m1+1,k)+u(i+1,m1+1,k))+2*h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);end%回代过程%u0(i,m1,k)=d(m1-1)/b(m1-1);for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=2*r4*ones(1,m2-1);d(1)=r*u(1,j,k+1)+2*u0(2,j,k);for l=2:m2-2d(l)=2*u0(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=2*u0(m2,j,k)+r*u(m2+1,j,k+1);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend3.function [u u0 p e x y t]=ADI5(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,未截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u1(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendr=h2/(h1*h1);r1=2*(1-r);r2=r/4;r3=2*(1+r);for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=u1(i,[1 m1+1],k)-r2*(u(i-1,[1 m1+1],k+1)-...2*u(i,[1 m1+1],k+1)+u(i+1,[1 m1+1],k+1)-u(i-1,[1 m1+1],k)+...2*u(i,[1 m1+1],k)-u(i+1,[1 m1+1],k));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendfor k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组%for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r3*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+... h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r3*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解 e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend[up e x y t]=ADI2(0.01,0.001,100,100,1000);surf(x,y,e(:,:,1001)) t=1的误差曲面下面是三种方法的误差比较:1.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)(t=1时的误差)2.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) surf(x,y,e(:,:,11))(表示t=1时的误差)下面是相关数据:1: [u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00040947 0.00025182 0.00019077 0.00017112 0.000176040 0.00057359 0.00042971 0.00035402 0.00032565 0.000336280 0.00066236 0.00054689 0.00047408 0.00044596 0.000462670 0.00072152 0.00062001 0.00055081 0.00052442 0.000545530 0.00076164 0.0006576 0.00058522 0.00055732 0.000579840 0.00078336 0.00065993 0.00057557 0.00054161 0.000562090 0.00078161 0.00061872 0.00051646 0.00047429 0.000489640 0.00073621 0.0005148 0.00039979 0.00035439 0.000363130 0.00056964 0.00031688 0.00022051 0.0001884 0.000191920 0 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00027006 0.00016305 0.00012104 0.0001071 0.000109950 0.00037754 0.00027817 0.0002253 0.00020483 0.000211160 0.00043539 0.00035386 0.00030207 0.00028124 0.00029140 0.00047398 0.00040104 0.00035113 0.00033111 0.000344050 0.0005003 0.00042535 0.00037309 0.0003519 0.000365710 0.00051479 0.00042699 0.00036681 0.00034164 0.00035410 0.00051415 0.00040056 0.00032887 0.0002985 0.000307640 0.00048504 0.0003335 0.00025411 0.0002221 0.000227060 0.00037609 0.00020532 0.00013956 0.00011718 0.000119020 0 0 0 0 03.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 8.6469e-006 1.4412e-005 1.8364e-005 2.091e-005 2.2174e-0050 1.4412e-005 2.4777e-005 3.2047e-005 3.6716e-005 3.8961e-0050 1.8364e-005 3.2047e-005 4.1789e-005 4.8054e-005 5.1008e-0050 2.091e-005 3.6716e-005 4.8054e-005 5.5353e-005 5.8764e-0050 2.2174e-005 3.8961e-005 5.1008e-005 5.8764e-005 6.2389e-0050 2.2118e-005 3.8698e-005 5.0523e-005 5.8126e-005 6.171e-0050 2.055e-005 3.5581e-005 4.6157e-005 5.2942e-005 5.6197e-0050 1.707e-005 2.8951e-005 3.7128e-005 4.2365e-005 4.4952e-0050 1.0851e-005 1.7698e-005 2.2265e-005 2.5203e-005 2.672e-0050 0 0 0 0 01.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)Columns 7 through 110 0 0 0 00.00020348 0.00026228 0.00038338 0.00066008 00.00038607 0.00048321 0.00064717 0.00091668 00.00052635 0.00064203 0.00081637 0.0010517 00.0006174 0.00074272 0.00092111 0.0011417 00.00065651 0.00078964 0.00097724 0.0012051 00.00064051 0.00078116 0.00098594 0.0012433 00.00056474 0.00070822 0.00093332 0.0012478 00.00042547 0.00055526 0.00078616 0.0011844 00.00022735 0.00030946 0.00049004 0.00092402 00 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)Columns 7 through 110 0 0 0 00.00012826 0.00016798 0.00024986 0.00043637 00.00024444 0.00031023 0.00042173 0.00060513 00.00033401 0.00041257 0.00053179 0.00069358 00.00039216 0.00047742 0.00059986 0.00075263 00.00041704 0.00050761 0.00063642 0.00079439 00.00040657 0.0005021 0.00064226 0.00081984 00.00035784 0.000455 0.00060828 0.00082334 00.00026866 0.00035628 0.00051263 0.0007824 00.00014262 0.00019789 0.00031956 0.0006113 00 0 0 0 0 3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) Columns 7 through 110 0 0 0 02.2118e-005 2.055e-005 1.707e-005 1.0851e-005 03.8698e-005 3.5581e-005 2.8951e-005 1.7698e-005 05.0523e-005 4.6157e-005 3.7128e-005 2.2265e-005 05.8126e-005 5.2942e-005 4.2365e-005 2.5203e-005 06.171e-005 5.6197e-005 4.4952e-005 2.672e-005 06.1116e-005 5.5803e-005 4.4817e-005 2.6785e-005 05.5803e-005 5.1239e-005 4.1529e-005 2.5153e-005 04.4817e-005 4.1529e-005 3.42e-005 2.126e-005 02.6785e-005 2.5153e-005 2.126e-005 1.3869e-005 00 0 0 0 0。
二维抛物线方程数值解法方法二维抛物线方程是数学中常见的偏微分方程之一,表示一个二维区域中的传热、扩散、波动等现象。
求解二维抛物线方程通常需要使用数值解法,其中ADI(Alternating Direction Implicit)隐式交替法是一种有效的数值解法之一、本文将详细介绍ADI隐式交替法的原理和步骤。
首先,我们来看一下二维抛物线方程的一般形式:∂u/∂t=α(∂²u/∂x²+∂²u/∂y²)+f(x,y,t)其中u(x,y,t)是未知函数,表示二维区域中的一些物理量(如温度),α是扩散系数,f(x,y,t)是源(即外力项)。
ADI隐式交替法的基本思想是将偏微分方程中的时间导数项进行分离,然后通过交替方向的半隐式差分逼近来求解。
具体步骤如下:1.将时间导数项进行分离,得到两个互相独立的方程:∂u/∂t=α(∂²u/∂x²)+α(∂²u/∂y²)+f(x,y,t)等价于:∂u/∂t=α(∂²u/∂x²)+f(x,y,t),考虑到y方向上的导数已经被分离出来。
∂u/∂t=α(∂²u/∂y²)+f(x,y,t),考虑到x方向上的导数已经被分离出来。
2. 对第一个方程应用隐式差分(比如Crank-Nicolson差分格式),得到一个关于未知函数u的线性方程组Ax=b。
3.利用ADI思想,对第二个方程同样进行隐式差分,得到另一个关于未知函数u的线性方程组Ay=c。
4.对线性方程组Ax=b和Ay=c进行求解,得到u的一个时间层的近似解。
5.重复步骤2至4,直到得到整个时间区间内的数值解。
ADI隐式交替法的关键在于递归地求解两个互相独立的线性方程组。
在每个时间步长中,先求解一个方向(比如x方向)上的方程组,然后用该方程组的解代入另一个方向(比如y方向)的方程组中求解。
通过交替进行,可以逼近二维抛物线方程的解。
一类二阶二维常系数抛物型方程的参数估计方法抛物型方程是一类很常见的偏微分方程,在数学和工程领域都有着广泛的应用。
通常情况下,我们可以通过已知的数据和条件来求解这类方程的解析解,但是有时候我们并不能得到方程的解析解,这时我们就需要考虑用参数估计的方法来求解方程的解。
在本文中,我们将讨论一类二阶二维常系数抛物型方程的参数估计方法。
这类方程的一般形式可以写为:$$\frac{∂^{2} u}{∂t^{2}} = a\frac{∂^{2} u}{∂x^{2}} +b\frac{∂u}{∂x} + cu$$其中$a,b,c$是常数,$u(x,t)$是变量。
接下来我们将介绍一种基于最小二乘法的参数估计方法,该方法可以帮助我们估计方程中的未知参数。
首先,我们假设我们有一些已知的数据点$(x_{i},t_{i},u_{i}),i=1,2,...,n$,我们可以用数据点构建一个误差函数,使其最小化。
误差函数的一种形式可以写为:$$E(a,b,c) = \sum_{i=1}^{n} (u_{i} - u(x_{i},t_{i}))^{2}$$其中$u(x_{i},t_{i})$是抛物型方程的解析解在点$(x_{i},t_{i})$的取值。
我们的目标是找到$a,b,c$的最优估计值,使得误差函数最小化。
接下来,我们可以用最小二乘法来估计$a,b,c$的值。
最小二乘法的基本思想是通过最小化误差函数来估计参数值。
我们可以将误差函数$E(a,b,c)$对$a,b,c$分别求偏导,并让导数为0,得到方程组:$$\begin{cases}\frac{∂E}{∂a} = 0 \\\frac{∂E}{∂b} = 0 \\\frac{∂E}{∂c} = 0 \\\end{cases}$$解这个方程组,我们就可以得到$a,b,c$的最优估计值。
最后,我们可以用已知的数据点和估计值$a,b,c$来重新求解抛物型方程,得到近似解,并且可以用残差分析方法来检验我们的估计结果是否准确可靠。

%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % % Example of ADI Method for 2D heat equation % % % % u_t = u_{xx} + u_{yy} + f(x,t) % %a<x<b;c<y<d % % Test problme: % % Exact solution: u(t,x,y) = exp(-t) sin(pi*x)sin(pi*y) % % Source term: f(t,x,y) = exp(-t) sin(pi*x) sin(pi*y) (2pi^2-1) % % % % Files needed for the test: % % % % adi.m: This file, the main calling code. % % f.m: The file defines the f(t,x,y) % % uexact.m: The exactsolution. % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear; close all; a = 0; b=1; c=0; d=1; n = 40; tfinal = 1; m = n; h = (b-a)/n; dt=h; h1 = h*h; r=dt/h1; x=a:h:b; y=c:h:d; %-- Initial condition: t = 0; for i=1:m+1, for j=1:m+1, u1(i,j) = uexact(t,x(i),y(j)); end end %---------- Big loop for time t -------------------------------------- k_t = fix(tfinal/dt); for k=1:k_t t1 = t + dt; t2 = t + dt/2; %--- sweep in x-direction -------------------------------------- for i=2:m, % Boundary condition. u2(1,i) = -r/2*uexact(t1,x(1),y(i-1)) + (1+r)*uexact(t1,x(1),y(i)) + -r/2*uexact(t1,x(1),y(i+1));u2(m+1,i) = -r/2*uexact(t1,x(m+1),y(i-1)) + (1+r)*uexact(t1,x(m+1),y(i)) + -r/2*uexact(t1,x(m+1),y(i+1)); end for j = 2:n, % Look for fixed y(j) b=zeros(m-1,1); for i=2:m, b(i-1) = r^2/4*( u1(i-1,j-1) + u1(i-1,j+1) + u1(i+1,j-1) + u1(i+1,j+1) ) ... +r/2*( 1-r )*( u1(i-1,j) + u1(i+1,j) + u1(i,j-1) + u1(i,j+1) )... + ( 1-2*r+r^2 )*u1(i,j) -3/2*dt*exp( 1/2*( (i-1)*h + (j-1)*h ) -t2 ); end b(1) = b(1) + r/2 * u2(1,j); b(m-1) =b(m-1) + r/2 * u2(m+1,j); A = diag( (1+r)*ones(m-1,1) ) + diag( -r/2*ones(m-2,1),1 ) ... + diag(-r/2*ones(m-2,1),-1); ut = A\b; % Solve the diagonal matrix. for i=1:m-1,u2(i+1,j) = ut(i); end end % Finish x-sweep. %-------------- loop in y -direction -------------------------------- for i=1:m+1, % Boundary condition u1(i,1) = uexact(t1,x(i),y(1));u1(i,n+1) = uexact(t1,x(i),y(m+1)); u1(1,i) = uexact(t1,x(1),y(i)); u1(m+1,i) =uexact(t1,x(m+1),y(i)); end for i = 2:m, for j=2:m, b(j-1) = u2(i,j); end b(1) = b(1) + r/2*u1(i,1); b(m-1) = b(m-1) + r/2*u1(i,m+1);A = diag( (1+r)*ones(m-1,1) ) + diag( -r/2*ones(m-2,1),1 ) ... + diag(-r/2*ones(m-2,1),-1); ut = A\b; for j=1:n-1, u1(i,j+1) = ut(j); end end % Finish y-sweep. t = t + dt; %--- finish ADI method at this time level, go to the next time level. end %-- Finished with the loop in time %----------- Data analysis ---------------------------------- for i=1:m+1, for j=1:n+1, ue(i,j) = uexact(tfinal,x(i),y(j)); end end [xx,yy]=meshgrid(x,y); xx=xx';yy=yy'; mesh(xx,yy,u1) title('数值解图') pause surf(xx,yy,ue) title('精确解图') pausesurf(xx,yy,u1-ue) title('误差图') e = max(max(abs(u1-ue))) % The infinityerror. %******%表示原来程序编写错误 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % % Example of ADI Method for 2D heat equation % % % % u_tt = u_{xx} + u_{yy} + f(x,t) % %a<x<b;c<y<d % % Test problme: % % 精确解: u(t,x,y) = exp( 1/2*(x+y) - t ) % % 右端函数: f(t,x,y) = 1/2*exp( 1/2*(x+y) - t ) % % 初始条件: g1 = exp( 1/2*(x+y) ) % % 初始导数条件: g2 = -exp( 1/2*(x+y) ) % % 需要函数 % % g1.m g2.m 初始条件 % % f2.m: The file defines the f(t,x,y) % % uexact.m: The exactsolution. % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear; close all; a = 0; b=1; c=0; d=1; n = 10; tfinal = 1; m = n; h = (b-a)/n; dt=h; s=(dt/h)^2; x=a:h:b; y=c:h:d; %-- Initial condition: t = 0; for i=1:m+1, for j=1:m+1, u1(i,j) = g1(x(i),y(j)); end end %-- Initial deriavtive condition: for i=1:m+1, for j=1:m+1, %******% u2(i,j) = g1(x(i),y(j)) + dt * g2( x(i),y(j) ) + dt^2/4 * ( g1(x(i),y(j)) + f2 (t, x(i),y(j) ) ); u2(i,j) =g1(x(i),y(j)) + dt * g2( x(i),y(j) ) + dt^2/2 * ( g1(x(i),y(j))/2 + f2 (t, x(i),y(j) ) ); endend %---------- Big loop for time t -------------------------------------- k_t = fix(tfinal/dt); for k=2:k_t t1 = t + dt; t2 = t1 + dt; %--- sweep in x-direction --------------------------------------for i=1:m+1, % Boundary condition. u4(1,i) = ( uexact(t,x(1),y(i)) -2*uexact(t1,x(1),y(i)) + uexact(t2,x(1),y(i)) )/dt^2 ; u4(m+1,i) = ( uexact(t,x(m+1),y(i)) - 2*uexact(t1,x(m+1),y(i)) + uexact(t2,x(m+1),y(i)) )/dt^2 ; u4(i,1) = ( uexact(t,x(i),y(1)) - 2*uexact(t1,x(i),y(1)) + uexact(t2,x(i),y(1)) )/dt^2 ; u4(i,m+1) = ( uexact(t,x(i),y(m+1)) - 2*uexact(t1,x(i),y(m+1)) + uexact(t2,x(i),y(m+1)) )/dt^2 ; end for i=2:m u3(1,i)=-s/2*u4(1,i-1) + (1+s)*u4(1,i) - s/2*u4(1,i+1); u3(m+1,i)=-s/2*u4(m+1,i-1) +(1+s)*u4(m+1,i) - s/2*u4(m+1,i+1); end for j = 2:n, % Look for fixed y(j) b=zeros(m-1,1); for i=2:m, b(i-1) = ( u2(i-1,j) + u2(i+1,j) + u2(i,j-1) + u2(i,j+1) -4*u2(i,j) )/h^2 +f2 (t1, x(i),y(j) ); end b(1) = b(1) + s/2 * u3(1,j); b(m-1) = b(m-1) + s/2 * u3(m+1,j); A = diag( (1+s)*ones(m-1,1) ) + diag( -s/2*ones(m-2,1),1 ) ... + diag(-s/2*ones(m-2,1),-1); ut = A\b; % Solve the diagonal matrix. for i=1:m-1, u3(i+1,j) = ut(i); end end % Finish x-sweep. %-------------- loop in y -direction -------------------------------- for i = 2:m, forj=2:m, b(j-1) = u3(i,j); end b(1) = b(1) + s/2*u4(i,1); b(m-1) = b(m-1) + s/2*u4(i,m+1); ut = A\b; for j=1:n-1, u4(i,j+1) = ut(j); end end % Finish y-sweep. for i=1:m+1, % Boundary condition u5(i,1) = uexact(t2,x(i),y(1)); u5(i,m+1) = uexact(t2,x(i),y(m+1));u5(1,i) = uexact(t2,x(1),y(i)); u5(m+1,i) = uexact(t2,x(m+1),y(i)); end for i=2:m, forj=2:m, u5(i,j) = dt^2 * u4(i,j) + 2*u2(i,j) - u1(i,j); end end u1=u2; u2=u5; %******%t = t2 + dt; t = t+dt ; %--- finish ADI method at this time level, go to the next time level. end %-- Finished with the loop in time %----------- Data analysis ---------------------------------- for i=1:m+1, for j=1:n+1, ue(i,j) = uexact(tfinal,x(i),y(j)); end end[xx,yy]=meshgrid(x,y); xx=xx';yy=yy'; mesh(xx,yy,u2) title('数值解图') pausesurf(xx,yy,ue) title('精确解图') pause %******%surf(xx,yy,u2-ue) surf(xx,yy,u2-ue) title('误差图') e = max(max(abs(u2-ue))) %******%e = max(max(abs(u1-ue))) % The infinityerror. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % % Example of ADI Method for 2D heat equation % % % % u_t = u_{xx} + u_{yy} + f(x,t) % %a<x<b;c<y<d % % Test problme: % % Exact solution: u(t,x,y) = exp(-t) sin(pi*x) sin(pi*y) % % Source term: f(t,x,y) = exp(-t) sin(pi*x) sin(pi*y) (2pi^2-1) % % % % Files needed for the test: % % % % f.m: The file defines the f(t,x,y) % % uexact.m: The exact solution. % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear; close all; a = 0; b=1; c=0; d=1; n = 20; tfinal = 1; m = n; h = (b-a)/n; h1 = h*h; dt=h1; r=dt/h1; x=a:h:b; y=c:h:d; %-- Initial condition: t = 0; for i=1:m+1, for j=1:m+1, u1(i,j) = uexact(t,x(i),y(j)); end end %---------- Big loop for time t -------------------------------------- k_t = ceil(tfinal/dt); for k=1:k_t t1 = t + dt; t2 = t + dt/2; %--- sweep in x-direction -------------------------------------- for j=2:m, % Boundary condition. u2(1,j) = (1/12-r/2)*uexact(t1,x(1),y(j-1)) + (5/6+r)*uexact(t1,x(1),y(j)) + (1/12-r/2) *uexact(t1,x(1),y(j+1)); u2(m+1,j) = (1/12-r/2)*uexact(t1,x(m+1),y(j-1)) +(5/6+r)*uexact(t1,x(m+1),y(j)) + (1/12-r/2) * uexact(t1,x(m+1),y(j+1)); end for j =2:n, % Look for fixed y(j) b=zeros(m-1,1); for i=2:m, b(i-1) = (1/144+r/12+r^2/4) * ( u1(i-1,j-1) + u1(i-1,j+1) + u1(i+1,j-1) + u1(i+1,j+1) ) ... + ( 10/144+r/3-r^2/2 )*( u1(i-1,j) + u1(i+1,j) + u1(i,j-1) + u1(i,j+1) )... + ( 100/144 - 40 * r/24 + r^2 )*u1(i,j)... + dt * ( f(t2,x(i-1),y(j-1)) + f(t2,x(i-1),y(j+1)) + f(t2,x(i+1),y(j-1)) + f(t2,x(i+1),y(j+1))... + 10 * ( f(t2,x(i-1),y(j)) + f(t2,x(i+1),y(j)) + f(t2,x(i),y(j-1)) + f(t2,x(i),y(j+1)) )... + 100 *f(t2,x(i),y(j)) ) / 144; end b(1) = b(1) + ( r/2 -1/12 ) * u2(1,j); b(m-1) = b(m-1) + ( r/2 -1/12 ) * u2(m+1,j); A = diag( (5/6+r)*ones(m-1,1) ) + diag( (1/12-r/2) * ones(m-2,1),1 ) ... + diag( (1/12-r/2) * ones(m-2,1),-1); ut = A\b; % Solve the diagonal matrix. for i=1:m-1, u2(i+1,j) = ut(i); end end % Finish x-sweep. %-------------- loop in y -direction -------------------------------- for i=1:m+1, % Boundary condition u1(i,1) = uexact(t1,x(i),y(1)); u1(i,n+1) = uexact(t1,x(i),y(m+1)); u1(1,i) = uexact(t1,x(1),y(i));u1(m+1,i) = uexact(t1,x(m+1),y(i)); end for i = 2:m, for j=2:m, b(j-1) = u2(i,j); end b(1) =b(1) + ( r/2 -1/12 ) * u1(i,1); b(m-1) = b(m-1) + ( r/2 -1/12 ) * u1(i,m+1); ut = A\b; for j=1:n-1, u1(i,j+1) = ut(j); end end % Finish y-sweep. t = t + dt; %--- finish ADI method at this time level, go to the next time level. end %-- Finished with the loop in time %----------- Data analysis ---------------------------------- for i=1:m+1, for j=1:n+1, ue(i,j) = uexact(tfinal,x(i),y(j)); end end [xx,yy]=meshgrid(x,y); xx=xx';yy=yy'; mesh(xx,yy,u1) title('数值解图') pause surf(xx,yy,ue) title('精确解图') pause surf(xx,yy,u1-ue) title('误差图') e = max(max(abs(u1-ue))) % The infinity error. %算例1.1.3,见课本第17页 %首先网格剖分 xl=0.; xr=pi;%左右端点 n=20; h=(xr-xl)/n;%步长 %解差分格式形成的方程组 U=zeros(n-1,1); aa=-1+h^2/12; bb=2+5/6*h^2; A=diag(bb*ones(n-1,1))+diag(aa*ones(n-2,1),1)+diag(aa*ones(n-2,1),-1);%系数矩阵 F=zeros(n-1,1); for i=1:n-1 F(i)=h^2/12*(exp(xl+(i-1)*h)*(sin(xl+(i-1)*h)-2*cos(xl+(i-1)*h))+10*exp(xl+i*h)*(sin(xl+i*h)-2*cos(xl+i*h))+exp(xl+(i+1)*h)*(sin(xl+(i+1)*h)-2*cos(xl+(i+1)*h)));%右端项 end U=inv(A)*F;%得到数值解 %精确解与数值解误差绝对值的最大值 ana=zeros(n-1,1); for i=1:n-1 ana(i)=exp(xl+i*h)*sin(xl+i*h);%精确解 end wucha=max(abs(U-ana)) %可视化处理 x=xl:h:xr; U=[0 U' 0];%U表示数值解ana=[0 ana' 0];%ana表示精确解 plot(x,U,'r*',x,ana); %向后Euler差分格式 %Ut-Uxx=0,0<x<1,0<t<1 %u(x,0)=exp(x) %u(0,t)=exp(t),u(1,t)=exp(1+t) %%%%%%%网格剖分%%%%%%%%% % first set up the attributes h = 0.1; % the step-size in the x dimension%空间步长 r=1; %步长比 dt = h^2 * r; % the step-size in the t dimension%%时间步长 T0 = 1; % the time-interval over which we will calculate u 时间长度 TN = ceil(T0 / dt); % the number of steps in the time-interval%时间网格 X0 = 1; % the x-interval over which we will calculate u空间长度 XN = ceil(X0 / h); % the number of steps in the x-interval%空间网格 U = zeros(XN + 1, TN + 1); % set up an array of zeros %初始化 % Next we set up the initial conditions%初始值及边界值 x = 0 :h: X0; for j=1:XN+1 U(j , 1) = exp( (j-1)*h ); end for k=1:TN+1 U(1,k) =exp( (k-1) *dt);U(XN+1,k)=exp(1+ ( k-1 ) *dt); end %%%%%%形成系数矩阵%%%%%%%% A=diag((5/6+r)*ones(XN-1,1))+diag( (1/12-r/2) *ones(XN-2,1),1 )+diag( (1/12-r/2)*ones(XN-2,1),-1 ); B=diag((5/6-r)*ones(XN-1,1))+diag( (1/12+r/2) *ones(XN-2,1),1 )+diag( (1/12+r/2)*ones(XN-2,1),-1 ); %右端项初始化 F = zeros( XN-1,1 ); %迭代求解 for k = 1 : TN F(1)=(1/12+r/2)*exp((k-1)*dt)-(1/12-r/2)*exp(k*dt); F(XN-1)=(1/12+r/2)*exp((k-1)*dt+1)-(1/12-r/2)*exp(k*dt+1); U(2:XN,k+1)= A \ ( B * U(2:XN,k) + F ); end; %给出精确解 ana = zeros(XN + 1, TN + 1); for k = 1 : TN+1 for j = 1 : XN+1 ana(j, k ) = exp ( (j-1) *h + (k-1)*dt); end; end; %给出在T=1时的最大误差 max( abs ( U (:,TN+1) -ana (:,TN+1) ) ) %图示化 t=0:dt:T0; [xx,tt]= meshgrid(x,t); xx=xx'; tt=tt'; mesh(xx,tt,ana); title('analytical solution');ylabel(sprintf('steps in x domain\nfrom 0 to 1')); xlabel(sprintf('steps in time-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(xx,tt,U); title('numerical solution'); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); xlabel(sprintf('steps in time-domain\nfrom 0 to 1')); zlabel('U(xi,tk)'); pause mesh(xx,tt,U-ana); title('diffeence beween analical and numeical soluion'); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); xlabel(sprintf('steps in time-domain\nfrom 0 to 1')); zlabel('U(xi,tk)'); pauseplot(x,U(:,TN+1),'-or',x,ana(:,TN+1)) title('向前Euler格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)')%Crank-Nicolson schemes % 显差分格式 %算例4.1.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt =1/20; %时间步长 s = a * dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n-1,m-1); for k=1:n+1 for i=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% for k=2:n for i=2:m u (k+1 , i) = s^2 * u (k , i-1) +2*( 1-s^2 )*u (k , i) ... + s^2 * u (k , i+1) - u (k-1 , i) + dt^2 * f( k , i); endend %%%%%%%%%%%%%%%%给出精确解 ana = zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end;end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt'; mesh(tt,xx,ana);title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pause mesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion'); xlabel(sprintf('steps in time- domain\nfrom 0 to 1')); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') % compace 差分格式 %算例4.3.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt =1/100; %时间步长 s = a * dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n+1,m+1); for k=1:n+1 fori=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% A=diag( (5/6+s^2 )*ones( m-1,1 ) )+diag( (1/12-1/2*s^2) * ones (m-2,1),1 )+diag( (1/12-1/2*s^2) * ones (m-2,1),-1 ); B=diag( -(5/6+s^2 )*ones( m-1,1 ) )+diag( (1/2*s^2-1/12) * ones (m-2,1),1 )+diag( (1/2*s^2-1/12) * ones (m-2,1),-1 ); C=diag(5/3*ones(m-1,1))+diag(1/6*ones(m-2,1),1)+diag(1/6*ones(m-2,1),-1); for k=2:n for i=2:m F(i-1)=1/12*dt^2*( f(i-1)+10*f(i)+f(i+1) ); end F(1)=F(1) + (1/2*s^2-1/12) * ( u(k+1,1) + u(k-1,1) )+1/6*u(k,1); F(m-1)=F(m-1) + (1/2*s^2-1/12) * ( u(k+1,m+1) + u(k-1,m+1) )+1/6*u(k,m+1); y = A \ ( B * u(k-1,2:m )' + F' + C* u( k,2:m )' ); for i=1:m-1u(k+1,i+1)=y(i); end end %%%%%%%%%%%%%%%%给出精确解 ana = zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end; end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt'; mesh(tt,xx,ana);title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pause mesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion'); xlabel(sprintf('steps in time- domain\nfrom 0 to 1')); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') % implicit difference scheme %算例4.2.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt = 1/10; %时间步长 s = a *dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n+1,m+1); for k=1:n+1 for i=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% A=diag( (1+s^2 )*ones( m-1,1 ) )+diag( -1/2*s^2 * ones (m-2,1),1 )+diag( -1/2*s^2 * ones (m-2,1),-1 ); B=diag( -(1+s^2 )*ones( m-1,1 ) )+diag( 1/2*s^2 * ones (m-2,1),1 )+diag( 1/2*s^2 * ones (m-2,1),-1 ); for k=2:n F = dt^2 * f( k,2:m ); F(1)=F(1) + 1/2*s^2*( u(k+1,1) + u(k-1,1) ); F(m-1)=F(m-1) +1/2*s^2*( u(k+1,m+1) + u(k-1,m+1) ); y = A \ ( B * u(k-1,2:m )' + F' + 2 * u( k,2:m )' ); for i=1:m-1 u(k+1,i+1)=y(i); end end %%%%%%%%%%%%%%%%给出精确解 ana= zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end; end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt';mesh(tt,xx,ana); title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1')); ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pausemesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1')); ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pausemesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion');xlabel(sprintf('steps in time- domain\nfrom 0 to 1')); ylabel(sprintf('steps in xdomain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') % compace 差分格式 %算例4.3.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt =1/100; %时间步长 s = a * dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n+1,m+1); for k=1:n+1 for i=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% A=diag( (5/6+s^2 )*ones( m-1,1 ) )+diag( (1/12-1/2*s^2) * ones (m-2,1),1 )+diag( (1/12-1/2*s^2) * ones (m-2,1),-1 ); B=diag( -(5/6+s^2 )*ones( m-1,1 ) )+diag( (1/2*s^2-1/12) * ones (m-2,1),1 )+diag( (1/2*s^2-1/12) * ones (m-2,1),-1 ); C=diag(5/3*ones(m-1,1))+diag(1/6*ones(m-2,1),1)+diag(1/6*ones(m-2,1),-1); for k=2:n for i=2:m F(i-1)=1/12*dt^2*( f(i-1)+10*f(i)+f(i+1) ); end F(1)=F(1) + (1/2*s^2-1/12) * ( u(k+1,1) + u(k-1,1) )+1/6*u(k,1); F(m-1)=F(m-1) + (1/2*s^2-1/12) * ( u(k+1,m+1) + u(k-1,m+1) )+1/6*u(k,m+1); y = A \ ( B * u(k-1,2:m )' + F' + C* u( k,2:m )' ); for i=1:m-1u(k+1,i+1)=y(i); end end %%%%%%%%%%%%%%%%给出精确解 ana = zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end; end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt'; mesh(tt,xx,ana);title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pause mesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion'); xlabel(sprintf('steps intime- domain\nfrom 0 to 1')); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') function pdegui(action) %PDEGUI Demonstrate soluton of model partial differential equations. % PDEGUI demonstrates the finite difference solution of model problems % involving Laplace's operator: % del^2_U =partial^2_U/partial_x^2 + partial^2_U/partial_y^2. % The PDEs are: % Poisson equation, del^2_U = 1. % Eigenvalue equation, del^2_U + lambda U = 0. % Heat equation, partial_U/dt = del^2_U. % Wave equation, partial^2_U/partial_t^2 =del^2_U. % Various regions can be selected: % Square, -1 = x = 1, -1 = y = 1. % L-shaped MathWorks logo made from 3/4 of the square. % Curved 'L', with a quarter circle in the 4-th square. % Disc of radius one. % Annulus with outer radius = 1, inner radius = 1/3; % Heart-shaped cardioid. % Exterior of a "Butterfly". % Cross section of a double ridge microwave waveguide. % For the eigenvalue problem, you can set the eigenvalue index. % For the heat equation, you can set sigma = (delta_t)/(delta_x)^2. % For the wave equation, you can set sigma = ((delta_t)/(delta_x))^2. % If sigma is too large, the time-stepping methods are unstable. if nargin == 0 Initialize_GUI action ='restart'; end set(findobj('tag','stop'),'userdata',0) drawnow if isequal(action,'restart') % Retrieve parameters from GUI r = findobj('tag','region'); s = get(r,'string'); region = s{get(r,'value')}; eqn = get(findobj('tag','eqn'),'value'); n =eval(get(findobj('tag','edit1'),'string')); text2 = findobj('tag','text2'); edit2 =findobj('tag','edit2'); if eqn == 1 set(text2,'vis','off'); set(edit2,'vis','off');set(findobj('string','+'),'vis','off'); set(findobj('string','-'),'vis','off'); else set(text2,'vis','on'); set(edit2,'vis','on'); set(findobj('string','+'),'vis','on'); set(findobj('string','-'),'vis','on'); end sigma = []; indx = []; switch eqn case 1 case 2 set(text2,'string','index =')set(edit2,'string','1') indx = 1; case 3 set(text2,'string','sigma =') set(edit2,'string','0.250') sigma = .250; case 4 set(text2,'string','sigma =') set(edit2,'string','0.500') sigma = .500; end % Generate the grid. G = gengrid(region(1),n); % Generate the discrete Laplacian.A = Laplacian(G); m = size(A,1); % Initialize the solution [x,y] = meshgrid(-1:2/n:1); if eqn == 1; u = []; v = []; lambda = []; elseif eqn == 2 v = []; h = 2/n; [u,lambda] = eigswatch(-(1/h^2)*A,10); else k = (G > 0); u = zeros(m,1); v = zeros(m,1); r =sqrt((x(k)-.5).^2 + (y(k)+.5).^2); if eqn == 3 u(:) = -(15/n)*exp(-5*r); else v(:) = -(15/n)*exp(-5*r); end lambda = []; end % Save everything in figure's userdata. data.eqn = eqn; data.G = G; data.A = A; data.x = x; data.y = y; data.n = n; data.m = m; data.u = u; data.v = v; data.sigma = sigma; data.indx = indx; mbda = lambda;set(gcf,'userdata',data); else % New value of sigma or index. data = get(gcf,'userdata'); edit2 = findobj('tag','edit2'); if data.eqn == 2 data.indx = eval(get(edit2,'string')); ifisequal(action,'+') data.indx = data.indx + 1; elseif isequal(action,'-') data.indx =max(1,data.indx - 1); end set(edit2,'string',sprintf('%6.0f',data.indx)) else data.sigma = eval(get(edit2,'string')); if isequal(action,'+') data.sigma = data.sigma + .001; elseif isequal(action,'-') data.sigma = data.sigma - .001; endset(edit2,'string',sprintf('%6.3f',data.sigma)) end set(gcf,'userdata',data); end data =get(gcf,'userdata'); A = data.A; u = data.u; v = data.v; sigma = data.sigma; eqn = data.eqn; m = data.m; n = data.n; indx = data.indx; x = data.x; y = data.y; G = data.G; set(findobj('tag','stop'),'userdata',0); while get(findobj('tag','stop'),'userdata') == 0 switch eqn case 1 % Solve sparse linear system Au = 1 u = A\(ones(m,1)); u = u/max(max(abs(u))); set(findobj('tag','stop'),'userdata',1) case 2 % Some eigenvalues already computed; maybe need more. while indx >length(mbda) k = length(mbda)+10; h = 2/n; [u,lambda] = eigswatch(-(1/h^2)*A,k); mbda = lambda; data.u = u; end lambda = mbda(indx); u = data.u(:,indx); u = u/max(max(abs(u))); set(findobj('tag','stop'),'userdata',1) case 3 % One step for heat equation u = u + sigma*A*u; data.u = u; case 4 % One step for wave equation w = u; u = 2*u - v + sigma*A*u; v = w; data.u = u; data.v = v; end % Map the solution onto the grid and display it. z = G; k = find(G>0); z(k) = u(z(k));contour(x,y,z,-1:.05:1) axis square set(gca,'color','k') if eqn == 2title(sprintf('lambda(%2d) = %9.4f',indx,lambda)) end drawnow set(gcf,'userdata',data) end % ------------------------------------------------------------------------ functionInitialize_GUI clf reset set(gcf,'pos',[150 260 710420],'doublebuffer','on','menubar','none', ... 'numbertitle','off','name','PDEgui','userdata',1); set(gca,'pos',[.11 .11 .6 .815]) uicontrol( ... 'tag','region', ...'style','list', ... 'units','normal', ... 'position',[.75 .55 .20 .35], ... 'string',{'Square','L (Logo)','Curved L','Disc','Annulus',... 'Heart','Butterfly','Waveguide'}, ... 'fontsize',12, ... 'value',2, ... 'callback','pdegui(''restart'')') uicontrol( ... 'tag','eqn', ... 'style','list', ...'units','normal', ... 'position',[.75 .35 .20 .18], ...'string',{'Poisson','Eigenvalue','Heat','Wave'}, ... 'fontsize',12, ... 'value',1, ...'callback','pdegui(''restart'')') uicontrol( ... 'tag','text1', ... 'style','text', ... 'units','normal', ... 'position',[.75 .27 .10 .06], ... 'string','grid size =', ... 'fontsize',12) uicontrol( ...'tag','edit1', ... 'style','edit', ... 'units','normal', ... 'position',[.85 .27 .10 .06], ...'string','32', ... 'backgroundcolor',[1 1 1], ... 'fontsize',12, ... 'callback','pdegui(''restart'')') uicontrol( ... 'tag','text2', ... 'style','text', ... 'units','normal', ... 'position',[.75 .19 .10 .06], ... 'string','', ... 'fontsize',12) uicontrol( ... 'tag','edit2', ... 'style','edit', ... 'units','normal', ... ' position',[.85 .19 .08 .06], ... 'string','0.5', ... 'backgroundcolor',[1 1 1], ... 'fontsize',12, ... 'callback','pdegui(''sigint'')') uicontrol( ... 'style','pushbutton', ... 'units','normal', ...'position',[.93 .19 .02 .03], ... 'string','-', ... 'fontsize',12, ... 'callback','pdegui(''-'')') uicontrol( ... 'style','pushbutton', ... 'units','normal', ... 'position',[.93 .22 .02 .03], ...'string','+', ... 'fontsize',12, ... 'callback','pdegui(''+'')') uicontrol( ... 'tag','stop', ...'style','pushbutton', ... 'units','normal', ... 'position',[.80 .11 .12 .06], ... 'string','stop', ... 'fontsize',12, ... 'userdata',0, ... 'callback','set(gcbo,''userdata'',1)'); uicontrol( ...'style','pushbutton', ... 'units','normal', ... 'position',[.80 .03 .12 .06], ... 'string','close', ... 'fontsize',12, ... 'callback','close(gcf)'); % ------------------------------------------------------------------------ function [u,lambda] = eigswatch(A,k) % [u,lambda] = eigswatch(A,k) % Modify pointer and text while computing k smallest % eigenvalues and eigenvectors of sparse matrix A. ps = get(gcf,'pointer'); set(gcf,'pointer','watch') text2 =findobj('tag','text2'); edit2 = findobj('tag','edit2'); str = get(text2,'string');set(text2,'string','computing') set(edit2,'vis','off') drawnow opts.disp = 0; [u,lambda] = eigs(A,k,0,opts); [lambda,p] = sort(diag(lambda)); u = u(:,p); % Make first eigenvector positive to % distinguish it from Poisson solution. u(:,1) = abs(u(:,1));set(text2,'string',str) set(edit2,'vis','on') set(gcf,'pointer',ps) % ------------------------------------------------------------------------ function G = gengrid(R,n) %GENGRID Number the grid points in a two dimensional region. % G = GENGRID('R',n) numbers the points on an n-by-n grid in % the subregion of -1=x=1 and -1=y=1 determined by 'R'. %SPY(GENGRID('R',n)) plots the points. % LAPLACIAN(GENGRID('R',n)) generates the 5-point discrete Laplacian. % The regions currently available are: % 'S' - the entire square. % 'L' - the L-shaped domain made from 3/4 of the entire square. % 'C' - like the 'L', but with a quarter circle in the 4-th square. % 'D' - the unit disc. % 'A' - an annulus. % 'H' - a heart-shaped cardioid. % 'B' - the exterior of a "Butterfly". % 'W' - cross section of a double ridge microwave waveguide. [x,y] = meshgrid(-1:2/n:1); switch(R) case 'S' G = (x > -1) & (x 1) & (y > -1) & (y 1); case 'L' G = (x > -1) & (x 1) & (y > -1) & (y 1) & ( (x > 0) | (y > 0)); case 'C' G = (x > -1) & (x 1) & (y > -1) & (y 1) & ((x+1).^2+(y+1).^2 > 1); case 'D' G = x.^2 + y.^2 1; case 'A' G = ( x.^2 + y.^2 1) & ( x.^2 + y.^2 > 1/3); case 'H' rho = .75; sigma= .75; G = (x.^2+y.^2).*(x.^2+y.^2-sigma*y) rho*x.^2; case 'B' t = atan2(y,x); r =sqrt(x.^2 + y.^2); G = (r >= sin(2*t) + .2*sin(8*t)) & ... (x > -1) & (x 1) & (y > -1) & (y 1); case 'W' G = (x > -1) & (x 1) & (y > -1) & (y 1) & (abs(x)>1/2 | abs(y)<1/2); otherwise error('Invalid region type.'); end k = find(G); G = zeros(size(G)); G(k) = (1:length(k))'; % ------------------------------------------------------------------------ function D = Laplacian(G) %LAPLACIAN Construct five-point finite difference Laplacian. % Laplacian(G) is the sparse form of the two-dimensional, % 5-point discrete Laplacian。
交替方向隐式法
Alternating direction implicit method (ADI)
数值分析中,交替方向隐式法(Alternating direction implicit method)是有限差分法的一种,用于求解抛物线型偏微分方程或椭圆型偏微分方程[1]。
特别适用于求解二维及更高维度的热传导方程与扩散方程。
求解热传导方程在传统上使用Crank-Nicolson方法,该方法较为耗时。
ADI的优点在于,每一迭代步中,所求解的方程具有更为简单的结构,因此更易于求解。
方法
考虑二维扩散方程,
隐式Crank-Nicolson方法将给出以下有限差分方程:
其中,是关于坐标方向p上的中心差分算符。
通过稳定性分析可以证明该方法对于任意都表现稳定。
但是,Crank-Nicolson方法的缺点在于,上述方程中的带状矩阵分布过宽,这使得求解方程相当耗时。
ADI方法的思想在于将一个有限差分方程分割为两个,一个在x方向上隐式求导,另一个在y方向上隐式求导。
这样,可以用三对角阵的求解算法
在此基础上扩展有更多的ADI方法,如Douglas[3],f-factor方法[4],可用于求解三维及更高维的问题。
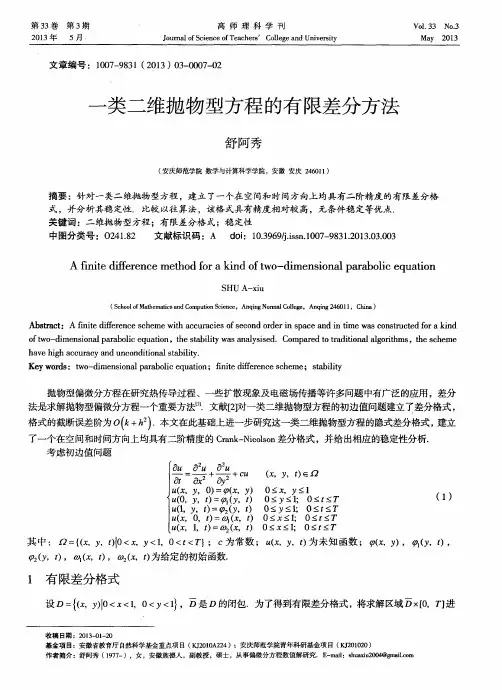
一类二维抛物型方程的ADI格式【摘要】本文针对一类二维抛物型方程,建立了一个在空间和时间方向上均具有二阶精度的ADI格式,并分析其稳定性. 比较以往算法,此格式具有精度较高,无条件稳定等优点,同时,该方法通过求解两个线性代数方程得到原问题的解,避免了非线性迭代运算,提高了计算效率.【关键词】二维抛物型方程;ADI格式;稳定性;截断误差1.引言抛物型偏微分方程在研究热传导过程、一些扩散现象及电磁场传播等许多问题中都有广泛的应用,对这一类方程数值解法的研究一直是科研工作者关注的热点问题之一,其中高精度的有限差分方法更是受到了越来越多的重视. 考虑如下的初边值问题[1]:其中,为常数.在文献[1]中对问题(1)建立了差分格式,格式的截断误差阶为.本文将在文献[1]的基础上进一步研究问题(1)的高效差分格式,建立了一个高精度的交替方向隐式差分格式(即ADI格式),提高了时间方向上的精度,并给出相应的稳定性分析。
2.差分格式的建立为了得到问题(1)的有限差分格式,首先将求解区域进行网格剖分,结点为. 选取正整数L和N,并令为方向上的网格步长,为方向上的网格步长,记假定第层的已知,则由第(Ⅰ)步,通过解一个三对角线性代数方程组求出,再由第(Ⅱ)步,再解一个三对角线性代数方程组即可求出. 所以,只要利用追赶法求解两个三对角线性代数方程组即可,此时计算量与储存量都较小. 另外,在处理边界条件时,为了提高精度,采取中心差分,这样会出现虚拟值,此时,只要再与格式中的方程联立,即可消去虚拟值[2].3. 稳定性分析下面采用von Newmann方法[3]对上述D格式进行稳定性分析. 一般地,低阶项不影响差分格式的稳定性,所以不妨略去项,并对(3)、(5)式消去中间变量得:利用Taylor展开式求误差,可知此处建立的D格式的截断误差阶为.参考文献:[1]管秋琴.一类二维抛物型方程的有限差分格式[J]. 赤峰学院学报(自然科学版). 2010,26(1):7.[2]Richtmyer R D ,Morton KW. Difference methods for initial - value problems (2nd edition)[J ] . John wiley &sons. 1967.[3]戴嘉尊,邱建贤. 微分方程数值解法[M]. 南京:东南大学出版社.2002.;安庆师范学院青年科研基金项目(KJ201020)。
数学中的抛物型方程抛物型方程(parabolic equation)是数学中一类重要的偏微分方程,它在物理学、工程学和社会科学等领域中具有广泛的应用。
本文将从抛物型方程的定义、特征和解法等方面进行论述,以帮助读者更好地理解和应用抛物型方程。
一、抛物型方程的定义在数学中,抛物型方程是一类二维或三维偏微分方程,其形式可以表示为:∂u/∂t = a∇²u + bu + c其中,∂u/∂t 表示函数 u 对时间 t 的偏导数,∇²u 表示函数 u 对空间坐标的拉普拉斯算子,a、b、c 是常数。
抛物型方程通常描述了某一物理现象随时间变化的规律,比如热传导、扩散等。
通过解抛物型方程,我们可以预测和分析这些物理现象。
二、抛物型方程的特征1. 热传导方程抛物型方程在热传导方程中的应用是最常见的。
热传导方程描述了物体内部温度随时间和空间的变化情况。
在一维情况下,热传导方程具有以下形式:∂u/∂t = α∂²u/∂x²其中,u(x, t) 表示在时刻 t 位置为 x 的温度,α 是热扩散系数。
2. 扩散方程抛物型方程在扩散方程中的应用也是非常重要的。
扩散方程描述了物质在浓度梯度驱动下的扩散过程。
在一维情况下,扩散方程具有以下形式:∂u/∂t = D∂²u/∂x²其中,u(x, t) 表示在时刻 t 位置为 x 的物质浓度,D 是扩散系数。
三、抛物型方程的解法对于抛物型方程,我们通常采用偏微分方程的求解方法,如分离变量法、格林函数法等。
1. 分离变量法分离变量法是一种常用的求解抛物型方程的方法。
它的基本思想是将多元函数分解为几个一元函数的乘积,并利用分离后的一元函数满足各自的方程来求解。
以热传导方程为例,我们可以将其分离变量为时间部分和空间部分:u(x, t) = X(x)T(t)代入原方程,得到两个方程:X''(x)T(t)/X(x) = T'(t)/T(t) = -λ²其中,λ² 是常数。
一类二维抛物型方程的ADI格式
【摘要】本文针对一类二维抛物型方程,建立了一个在空间和时间方向上均具有二阶精度的ADI格式,并分析其稳定性. 比较以往算法,此格式具有精度较高,无条件稳定等优点,同时,该方法通过求解两个线性代数方程得到原问题的解,避免了非线性迭代运算,提高了计算效率.
【关键词】二维抛物型方程;ADI格式;稳定性;截断误差
1.引言
抛物型偏微分方程在研究热传导过程、一些扩散现象及电磁场传播等许多问题中都有广泛的应用,对这一类方程数值解法的研究一直是科研工作者关注的热点问题之一,其中高精度的有限差分方法更是受到了越来越多的重视. 考虑如下的初边值问题[1]:
其中,为常数.
在文献[1]中对问题(1)建立了差分格式,格式的截断误差阶为.本文将在文献[1]的基础上进一步研究问题(1)的高效差分格式,建立了一个高精度的交替方向隐式差分格式(即ADI格式),提高了时间方向上的精度,并给出相应的稳定性分析。
2.差分格式的建立
为了得到问题(1)的有限差分格式,首先将求解区域进行网格剖分,结点为. 选取正整数L和N,并令为方向上的网格步长,为方向上的网格步长,记
假定第层的已知,则由第(Ⅰ)步,通过解一个三对角线性代数方程组求出,再由第(Ⅱ)步,再解一个三对角线性代数方程组即可求出. 所以,只要利用追赶法求解两个三对角线性代数方程组即可,此时计算量与储存量都较小. 另外,在处理边界条件时,为了提高精度,采取中心差分,这样会出现虚拟值,此时,只要再与格式中的方程联立,即可消去虚拟值[2].
3. 稳定性分析
下面采用von Newmann方法[3]对上述D格式进行稳定性分析. 一般地,低阶项不影响差分格式的稳定性,所以不妨略去项,并对(3)、(5)式消去中间变量得:
利用Taylor展开式求误差,可知此处建立的D格式的截断误差阶为.
参考文献:
[1]管秋琴.一类二维抛物型方程的有限差分格式[J]. 赤峰学院学报(自然科学版). 2010,26(1):7.
[2]Richtmyer R D ,Morton KW. Difference methods for initial - value problems (2nd edition)[J ] . John wiley &sons. 1967.
[3]戴嘉尊,邱建贤. 微分方程数值解法[M]. 南京:东南大学出版社.2002.
;安庆师范学院青年科研基金项目(KJ201020)。