模型预测控制 PPT课件
- 格式:ppt
- 大小:674.88 KB
- 文档页数:86




专题1作业
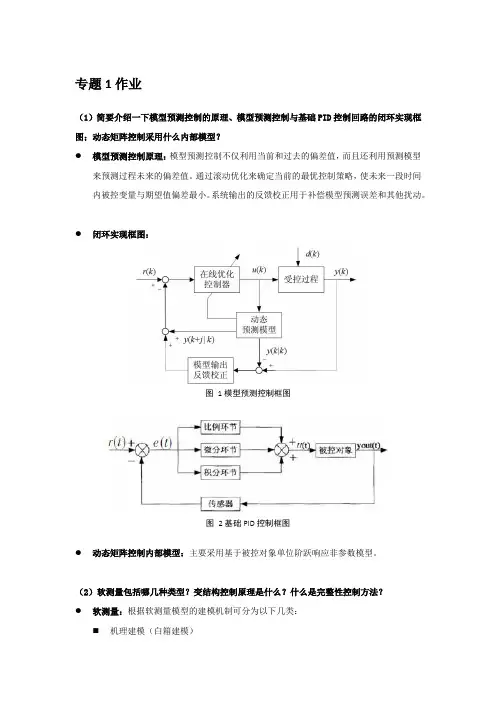
(1)简要介绍一下模型预测控制的原理、模型预测控制与基础PID控制回路的闭环实现框图;动态矩阵控制采用什么内部模型?
●模型预测控制原理:模型预测控制不仅利用当前和过去的偏差值,而且还利用预测模型
来预测过程未来的偏差值。
通过滚动优化来确定当前的最优控制策略,使未来一段时间内被控变量与期望值偏差最小。
系统输出的反馈校正用于补偿模型预测误差和其他扰动。
●闭环实现框图:
图1模型预测控制框图
图2基础PID控制框图
●动态矩阵控制内部模型:主要采用基于被控对象单位阶跃响应非参数模型。
(2)软测量包括哪几种类型?变结构控制原理是什么?什么是完整性控制方法?
●软测量:根据软测量模型的建模机制可分为以下几类:
⏹机理建模(白箱建模)
⏹数据驱动建模(黑箱建模)
⏹混合建模
⏹非线性动态软测量建模
●变结构控制原理:在动态控制中,根据系统当时状态,以跃变方式有目的地不断变换,
迫使系统按预定的“滑动模态”的状态轨迹运动。
变结构是通过切换函数实现的。
当系统的状态向量所决定的切换函数值,随着它的运动达到某特定值时,系统中一种结构(运动微分方程)转变成另一种结构。
其系统结构图如下所示。
图3变结构控制系统框图
●完整性控制方法:完整性控制是容错控制的研究热点,所谓完整性是指当系统中某些部
件失效后,系统仍能够稳定工作的特性。
基于该特性的控制方法即为完整性控制方法。

16.323讲课15模型预测控制z Allgower,F.,和A.Zheng,非线性模型预测控制,Springer-Verlag,2000。
z Comacho,E.,和C.Bordons,模型预测控制,Springer-Verlag,1999。
z Kouvaritakis,B.,和M.Cannon,非线性预测控制:理论和实践,IEE出版社,2001。
z Maciejowski,J.,有约束的预测控制,Pearson Education POD,2002.z Rossiter,J.A.,基于模型的预测控制:实践方法,CRC出版社,2003。
MPCz 在讲课7的计划是有效“开环”- 使用一个假设的模型和约束集设计控制输入序列u()t 。
- 问题是有模型误差与/或扰动时,这些输入不能产生期望的系统响应。
z 需要“闭环”策略补偿这些误差。
- 方法称作模型预测控制 - 也就是知名的滚动时域控制z 基本策略:- 在时刻k ,由当前状态x()k 使用系统模型的知识设计一个有限范围N 长的输入序列u(|1),u(|2),u(|3),,u(|)k k k k k k k k N ++++…- 实现输入序列的一部分,通常就是第一步。
- 在时间1k+,对状态x(1)k +重复上述步骤参考旧输出旧输入过去当前未来时间未来输入,没有控制“最优的”未来输入未来输出,没有控制“最优的”未来输出MPC :基本思想(来自Bo Wahlberg )MIT OCW 供图z 注意控制算法是基于在每一步数值求解一个最优化问题- 典型的有约束优化z MPC 的主要优势:- 明确说明系统约束。
不只是设计控制器使得系统远离约束。
- 可以容易处理非线性和时变对象动态,因为控制器是可以实时(和计划时间)修改的模型的显函数z 许多商业应用的时间可以追溯到20世纪70年代早期,见/~qin/cptv/cptv14.html- 很多这些工作是过程控制 — 是非线性动态,但是变化不是特别快。
离散时间状态空间模型模型预测控制摘要:1.离散时间状态空间模型的基本概念2.模型预测控制的原理和方法3.离散时间状态空间模型在实际应用中的优势和局限性4.模型预测控制在我国的研究与应用现状5.未来发展趋势和展望正文:一、离散时间状态空间模型的基本概念离散时间状态空间模型(Discrete-Time State Space Model)是一种用于描述离散时间系统中状态随时间变化的数学模型。
它由离散时间、离散状态和系统动态方程三部分组成。
离散时间表示系统状态更新的时刻;离散状态描述了系统在各个离散时刻的状态变量;系统动态方程则描述了状态变量在相邻离散时刻之间的变化规律。
二、模型预测控制的原理和方法模型预测控制(Model Predictive Control,MPC)是一种基于数学模型的控制策略。
其主要思想是在预测未来系统状态的基础上,优化控制输入,使得系统输出尽可能接近期望值。
模型预测控制的实质是在离散时间状态空间模型基础上,通过求解最优控制问题来实现对系统的控制。
三、离散时间状态空间模型在实际应用中的优势和局限性离散时间状态空间模型在许多实际应用领域具有广泛的应用价值,例如工业过程控制、机器人控制、交通运输系统控制等。
其主要优势在于能够有效地描述系统的动态特性,同时具有一定的计算效率。
然而,离散时间状态空间模型也存在一定的局限性,例如对系统噪声的抑制能力较弱,以及对系统不确定性描述的不够准确等。
四、模型预测控制在我国的研究与应用现状近年来,我国在模型预测控制领域的研究取得了显著成果。
不仅在理论研究方面不断深入,而且在实际应用中也取得了良好的效果。
目前,模型预测控制已成功应用于电力系统、化学过程、机械系统等多个领域。
五、未来发展趋势和展望随着科技的不断发展,离散时间状态空间模型和模型预测控制在未来的研究和发展中将具有以下趋势:1.深入研究系统不确定性处理方法,提高模型预测控制的鲁棒性;2.发展多变量、多目标优化算法,提高控制性能;3.结合其他先进控制策略,如自适应控制、优化算法等,实现更高效、更可靠的控制;4.在更多实际应用领域推广和应用模型预测控制技术,为我国的工业发展和科技创新贡献力量。

先进控制技术”第二章第二章模型测控制模型预测控制—MPC Model PredictiveC lControl) )本讲内容要点))))))模型预测控制在工业中的应用举例模型预测控制的发展背景)))预测控制的特点(1)))))有约束条件、大纯滞后、非最小相位及)预测控制的发展)))国内外先进控制软件包开发所走的道路212.1 预测控制的基本原理))现在一般则更清楚地表述为:模型、滚动优化、反馈反馈2112.1.1.预测模型(内部模型) ))差分方程阶跃响应2112.1.1.预测模预测型(内部模型)3未来过去y 14u2k 时刻1—控制策略Ⅰ;2—控制策略Ⅱ;3—对应于控制策略Ⅰ的输出;的输出4—对应于控制策略Ⅱ的输出。
图2-1 基于模型的预测2.1.2. 滚动优化(在线优化)212))212K 时刻优化2.1.2.滚动优化(在线优化).y ry213uk +1时刻优化y r21yu31─参考轨迹(虚线)y r ; 2─最优预测输出y (实线);─k +1`k t/T 3最优控制作用u 。
图2-2滚动优化2.1.3. 反馈校正213)实际测到的输出信息对基于模型的预测输出进行修正,然后再进行新对预测输出值作出修正使滚动优化不但基于模型,而且利用了反馈信息构成闭环优化息,构成闭环优化。
2.1.3.反馈校正(误差校正)2413yu k k +1时刻的测输出时刻实输出t/T2-31─k 时刻的预测输出;2─k +1时刻实际输出;3─预测误差;4─k +1时刻校正后的预测输出。
图23 误差校正222.2 动态矩阵控制(DMC) )a≈a)(∞N221DMC 2.2.1. DMC的预测模型(1)模型截断ya Na N-10123a 3a 2a 1N N-1t/T 图2-4 系统的单位阶跃采样数据示意图2.2 动态矩阵控制(DMC)22)))则保证了可用线性系统的迭加性等2.2.1. DMC的预测模型(2)221DMC, t=k T时刻预测未来N个时刻))+M 1y PM (k)a P-M+1Δu(k +M-1)+3/y M (k 3/k)y M (k +2/k)a 1Δu(k +2)a P-1Δu(k +1)y M (k +1/k)a 1Δu(k +1)a 2Δu(k +1)a P Δu(k)y P0(k)y 0(k +1/k)a 1Δu(k)a 2Δu(k)a 3Δu(k)y 0(k +2/k)k k+1k+2k+3k+P t/T y M (k +3/k)图2-5 根据输入控制增量预测输出的示意图2.2.1. DMC的预测模型(3)221DMC))是滚动优是控制时域长度。
