空管自动化系统两项告警
- 格式:pdf
- 大小:1008.59 KB
- 文档页数:3
空管川大自动化系统介绍及常见故障的分析和处理摘要:民航空管自动化系统作为民航空管系统的核心组成部分,它的主要功能是对多雷达信号进行融合处理,并将雷达信号与飞行计划动态相关联,使管制员直观清晰地了解空中交通的实时动态和所管制航空器的具体方位、高度和预计飞行方向等。
本文通过对空中交通管制指挥中主用的川大自动化系统进行介绍及常见故障的分析和处理方法,来提供一些经验思路,与同行共同探讨。
关键词:空管自动化系统;系统结构及组成;故障分析和处理一、川大空管自动化系统的结构特点与系统组成1、系统结构特点系统采用分布式结构,通过LAN-A、LAN-B冗余网络和LAN-C旁路网网络将各个信息处理服务器和工作站等系统单元连接起来,协同工作,并与雷达和ADS-B信息源、AFTN网、气象设备以及其它ATC自动化处理系统等各种相关数据交换网络互连,进行数据、电报、控制信息的交换。
系统主要/关键设备冗余结构设计,采用高可靠、成熟、新技术的商业货架产品,Linux操作系统的服务器和PC工作站,易于软件和硬件的扩充和升级,易于和其它设备及其它ATC系统互联,具有实现不同ATC系统之间进行AIDC自动管制移交的功能。
2、系统主要设备组成及实现功能(1)系统前端数据处理子系统(SFDPS)完成接入该子系统雷达信号预处理、RTQC、优选相同雷达站雷达信号,筛选掉错误雷达数据,格式变换、报文接入解析,前端设备监控(雷达错误信息进行告警)等功能。
主备两台服务器,互为热备份。
(2)监视数据处理子系统(SDPS)完成单雷达数据跟踪处理、多雷达数据融合处理、告警计算(CLAM\DUP\RVSM\CA\DAIW)等功能,为席位提供显示数据输入。
主备两台服务器,互为热备份。
(3)飞行数据处理子系统(FDPS)完成飞行数据处理、AIDC、相关、移交、SSR管理、扇区分配等。
主备两台服务器,互为热备份。
(4) ADS-B/MLAT数据处理子系统(AMDPS)处理单路ADS-B/MLAT数据并融合,再与雷达数据进行融合。
自动化系统RVSM功能介绍作者:宋玉华来源:《科学大众》2019年第08期摘; ;要:文章重点讲述了空管自动化系统RVSM功能的实施和应用,阐述了RVSM功能的基本原理,分析了其功能和功能应用的要求。
关键词:RVSM;ATC;RDP;FDP1; ; 空管自动化系统RVSM功能要求1.1; 飞行计划处理功能要求航空交通管制(Air Traffic Control,ATC)系统能够根据飞行计划正确识别航空器是否获准缩小垂直间隔(Reduced Vertical Separation Minimum,RVSM)运行。
能够正确收发和处理包含RVSM信息的AFTN电报(包括FPL,CPL,CHG报等),并自动更新相应飞行计划中航空器的RVSM属性。
ATC系统具备在飞行计划处理席位上显示并编辑航空器RVSM属性的功能。
可在纸质进程单上增加RVSM标志域打印位置,进程单样式可以根据用户要求设置。
具备RVSM数据输出功能,数据输出格式须符合《关于采集用于缩小垂直间隔安全风险评估的飞行流数据的通知》(总局发明电〔2007〕1341号)的要求。
1.2; 飞行动态显示功能要求ATC系统能够通过雷达航迹或标牌的显示来区分航空器是否獲准RVSM运行,通过电子进程单区分航空器是否获准RVSM运行许可的功能。
在飞行动态显示界面上,ATC系统应该提供手工修改航空器RVSM属性的功能。
未获得RVSM运行许可的航空器入侵RVSM运行空域时,ATC系统飞行动态显示界面上应有提示信息。
1.3; 冲突告警处理功能要求对于8 900(含)~12 500(含) m的高度范围,ATC系统能够设置两种冲突告警参数标准。
不具备RVSM能力的航空器之间、不具备RVSM能力与具备RVSM能力的航空器之间的冲突告警按600 m间隔标准计算;具备RVSM能力的航空器之间的冲突告警按300 m间隔标准计算。
对于8 400 m~8 900 m高度范围,ATC系统按照500 m管制间隔进行告警参数设置,同时要求该参数可根据运行需求离线调整。
基于空管系统的告警技术实施要点解析作者:张旭光来源:《科技与创新》2015年第08期摘要:在社会经济飞速发展的过程中,随着航空运输业的不断成熟,空中交通管制系统也在不断完善。
在该系统中,空中告警技术处理是其重要的组成部分。
借鉴了以往的成果,深入研究了空管系统的告警技术,以期能为日后的相关工作提供一些有价值的参考。
关键词:空管系统;告警技术;实施要点;航空运输业中图分类号:V355.1 文献标识码:A DOI:10.15913/ki.kjycx.2015.08.145近年来,全国民航客流量和空中交通流量在不断增大,但是,在航空通信、导航、监视和空中交通管理系统中还是存在许多缺陷,其与时代发展的要求不相符。
随着空中交通流量的扩大,难免会出现空中交通拥挤问题,这就对空中交通管制系统提出了更高的要求。
航空对安全有较高的要求,为了保证人们的生命财产安全,就需要科学地应用告警技术。
1 ATC系统在近些年的发展过程中,因为民航运输事业高效和快速的特点,吸引了很多用户。
ATC 系统的作用是维护空中的交通秩序,从而保证空中飞行安全。
在此过程中,该系统的主要任务就是避免航空器相撞事故的发生,从而保证空中交通可以有序流动。
在空中交通管制中,规定了空域中不同走向的飞机分别占用的高度层次,有效保证其垂直间隔。
为了控制其侧向间隔,还规定了航路宽度和平行航线之间的间距。
在飞机起飞放行时,要预先安排同航路上同向飞行的飞机之间的时间间隔或者距离间隔。
如果管制员或者驾驶员出现了一些疏忽,就会违反三维安全间隔,进而威胁到空中交通。
如果环境中有雷达监视,那么,借助于ATC系统,将雷达探测的航迹信息纳入考虑范围中,就可以判断潜在的危险,采取视频技术和音频技术向管制员及时告警,通过及时调配工作,实现空中交通警戒与防撞处理。
1.1 系统结构与功能ATC系统应用了分布式开放式体系结构,它是由多部分共同组成的,比如多线路分配器、前端雷达数据预处理子系统、气象数据处理子系统和实时监控子系统等。
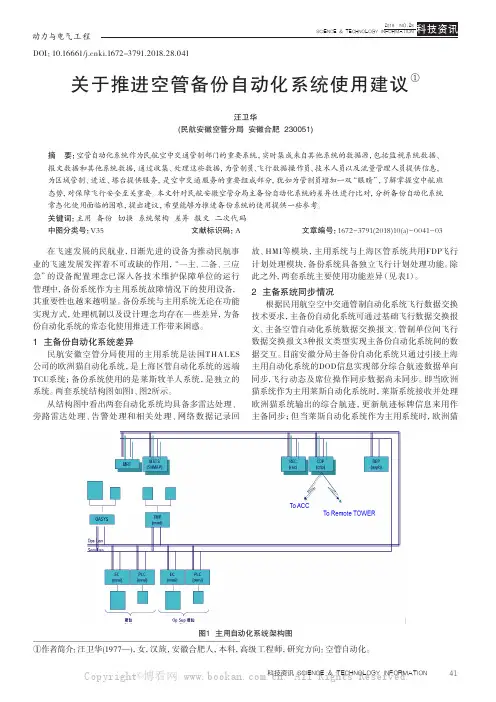
41科技资讯 SCIENCE & TECHNOLOGY INFORMATION动力与电气工程DOI:10.16661/ki.1672-3791.2018.28.041关于推进空管备份自动化系统使用建议①汪卫华(民航安徽空管分局 安徽合肥 230051)摘 要:空管自动化系统作为民航空中交通管制部门的重要系统,实时集成来自其他系统的数据源,包括监视系统数据、报文数据和其他系统数据,通过收集、处理这些数据,为管制员、飞行数据操作员、技术人员以及流量管理人员提供信息,为区域管制、进近、塔台提供服务,是空中交通服务的重要组成部分,犹如为管制员增加一双“眼睛”,了解掌握空中航班态势,对保障飞行安全至关重要。
本文针对民航安徽空管分局主备份自动化系统的差异性进行比对,分析备份自动化系统常态化使用面临的困难,提出建议,希望能够为推进备份系统的使用提供一些参考。
关键词:主用 备份 切换 系统架构 差异 报文 二次代码中图分类号:V35 文献标识码:A 文章编号:1672-3791(2018)10(a)-0041-03①作者简介:汪卫华(1977—),女,汉族,安徽合肥人,本科,高级工程师,研究方向:空管自动化。
在飞速发展的民航业,日渐先进的设备为推动民航事业的飞速发展发挥着不可或缺的作用,“一主、二备、三应急”的设备配置理念已深入各技术维护保障单位的运行管理中,备份系统作为主用系统故障情况下的使用设备,其重要性也越来越明显。
备份系统与主用系统无论在功能实现方式,处理机制以及设计理念均存在一些差异,为备份自动化系统的常态化使用推进工作带来困惑。
1 主备份自动化系统差异民航安徽空管分局使用的主用系统是法国THALES公司的欧洲猫自动化系统,是上海区管自动化系统的远端TCU系统;备份系统使用的是莱斯牧羊人系统,是独立的系统。
两套系统结构图如图1、图2所示。
从结构图中看出两套自动化系统均具备多雷达处理、旁路雷达处理、告警处理和相关处理、网络数据记录回放、HMI等模块,主用系统与上海区管系统共用FDP 飞行计划处理模块,备份系统具备独立飞行计划处理功能。
技术论坛TECHNOLOGY FORUM中国航班CHINA FLIGHTS 32摘要:空管自动化系统是支持管制员对空指挥的核心设备。
文章以南京莱斯公司研发的NUMAN2000自动化系统为例。
简要介绍了空管自动化系统的功能,浅析使用过程中的常见故障问题及原因。
关键词:NUMAN2000空管自动化系统;常见故障;分析空管自动化系统的主要功能是为空管部门提供空中交通监视服务,它能够实时收集来自信息探测系统(雷达、ADS-B、多点定位系统)的监视数据,通过处理这些监视数据,为管制员提供航空器在空中的飞行态势显示服务和飞行过程中的各种冲突告警服务。
让管制员能够安全、有序的对航空器加以指挥。
南京莱斯公司研发的NUMAN自动化系统是目前空管系统常用的国产自动化之一。
它能够引接处理多部监视源数据,形成的目标航迹稳定可靠并且精度较高。
在国内众多空管局(站)投入使用,而NUMAN2000空管自动化系统已在南京禄口国际机场正式投入使用近10年。
本文将以NUMAN2000自动化系统为例,浅析空管自动化系统的功能及使用过程中的常见故障问题。
1系统功能与结构1.1系统功能空管自动化系统具备如下功能:(1)监视数据处理:能够收集、获取、处理、融合并且显示多路监视数据、飞行计划数据、航空气象信息。
(2)飞行数据处理:能够处理飞行计划,计算4D航迹。
(3)冲突及异常告警功能:通过对飞行态势的监视和预测,提供冲突及异常告警功能。
(4)数据交互:提供相邻管制区之间、管制中心与飞行器之间、内部外部系统之间的数据交互。
(5)流量控制管理:能够进行流量统计和预测。
(6)系统监视控制:能够对系统的工作参数及环境数据进行实时的监控。
(7)数据存储和回放:能够及时记录存储监视及飞行数据、技术参数、系统运行数据、气象和机场信息。
可用于日后的数据分析和重演。
(8)离线数据管理:定义系统工作环境,进行功能分配。
1.2系统结构系统通过交换机组成星形拓朴结构的LANA、LANB、LAN C三个以太局域网,使用三网运行方式。
中国航班飞行与安全Flight and Safety CHINA FLIGHTS32关于AirNet空管自动化系统设计与功能的研究杨炎熙|民航河南空管分局摘要:AirNet空管自动化系统是一套基于Linux多任务操作系统的空管自动化系统。
该系统是由中国民航第二研究所研发设计,是一套为数不多的国产空管自动化系统。
AirNet空管自动化系统通过处理监视数据和飞行计划数据,为管制员提供航空器在空中飞行的态势和飞行冲突以及异常告警。
关键词:AirNet空管自动化系统;监视数据;飞行计划;数据记录回放;告警冲突1 AirNet空管自动化系统概述AirNet空管自动化系统是基于Linux多任务操作系统设计,该系统可以处理多种监视数据,对多协议多雷达数据进行实时接收、质量校验、数据处理、系统航迹融合等。
系统通过1000M的Ethernet网络,将各个设备有机的连接起来,能做到主备服务器之间数据实时同步,自动无缝切换,保障系统运行的可靠性。
AirNet空管自动化系统能同时处理多部监视数据,系统采用动态加权数据融合的算法,最终形成稳定的系统航迹进行输出显示。
系统可以处理各种报文,将解析出来的航路信息进行4D飞行轨迹模型计算,实现雷达航迹和飞行计划的自动相关。
除此之外,系统能够对融合航迹产生各种告警功能,并且系统在雷达目标丢失的情况下,可以将系统航迹进行外推显示。
2 AirNet空管自动化系统设计AirNet空管自动化系统采用开放的系统设计,内部主要采用标准TCP/IP和UDP/IP通信协议,具有标准的电报数据,监视数据、AIDC、ADS等接口,可以和外部系统进行数据的互联,在系统架构上采用MID中间件核心技术,负责系统各节点的信息交换,以及系统的升级和扩展。
AirNet空管自动化系统的核心是冗余、分布式的网络架构,系统采用三网冗余结构,其中工作网络(A网、B网)保证服务器和终端节点的信息交互,旁路网(C网)采用独立的交换机,独立的雷达旁路服务器。
STCA告警在空管安全运行中的应用思考作者:黄磊来源:《科学与财富》2020年第08期摘要:在空中交通管制中,短期冲突告警能够起到有效的作用,避免飞机之间产生冲撞,保证了航行的安全性。
应对短期冲突告警进行合理应用,使其能够为管制带来帮助。
本文对短期冲突告警进行了介绍,阐述了告警的原理,分析了告警测试及应用,包括参数测试以及应用效果,为空中交通管制的效果提供了保障,同时也能够发挥出短期冲突告警的良好效果。
关键词:短期飞行冲突告警;空中交通管制;安全运行引言在空中交通管制中,飞行冲突告警能够避免航空器之间产生碰撞的问题,借助告警可使管制员了解到其中的隐患问题,并且预先采取措施进行避免,保证航空器的航行的安全性。
其中短期飞行冲突告警是一项重要的技术,能够在应用发挥出有效的作用。
为了使短期飞行冲突告警在管制中得到有效的应用,对其进行深入分析,通过合理的应用使管制的效果加强,为交通管制提供帮助。
一、STCA告警概述短期冲突告警,简称为STCA告警,这种告警指的是在经过了一段前探时间后,航空器的水平与垂直距离相比预设值要小,也就是最小安全距离产生的告警。
在应用中,短期冲突告警进行周期计算,每隔STCA_UPDATE_PERIOD个航迹的时候,更新周期,并且一次计算。
该告警功能模块可比较源航迹以及目标航迹的距离,在源航迹与目标航迹之间的距离相比预设的数值小的时候,会产生告警。
在系统中可将空域划分成STCA告警去以及抑制区,进行告警计算只在告警区域中发挥作用,在抑制区中不进行告警计算。
二、告警功能的实现短期飞行冲突告警的计算中包括当前模式计算与推测模式计算,在当前的民航管理要求中,对空中交通管制自动化系统的告警以及短期飞行冲突告警内容进行了明确,为了避免虚警系统在推测模式下进行探测,需要对CFL数据航迹进行高度层保护设计。
这种方式的原理是对有CFL高度的目标不根据升降率推测其高度变化,而是作为一种目标需要达到的高度,以此为基础与其他航空器进行垂直方向冲突告警计算。
AirNet空管自动化系统的配置与应用题记:近年来, AirNet自动化系统被广泛应用于民航空管系统,为航班的指挥提供便捷的可视化人机交互系统,本文从AirNet自动化系统硬件配置、功能展示入手,概述了系统的基本功能和亮点特色,方便用户对系统进行进一步了解,另外本文从发展角度对自动化系统未来的趋势进行了展望,欢迎读者进一步探讨交流。
一、系统配置1.服务器配置AirNet自动化系统主要由服务器及服务器系统构成,其服务器基本包含数据处理、数据通信、告警探测、事件记录、数据存储、旁路备份等服务器,每类服务器配置不同的子系统,用于功能实现,详情如下:2.数据接口子网数据接口子网分为主监视数据接口A、B子网和旁路数据接口子网(C网)。
数据接口子网分别为各网提供独立的接入设备,以达到接入信号冗余备份的目的。
数据接口子网将所有接入的同步或异步数据通过对应的接入设备转换为网络方式,服务器均通过独立的网卡直接访问引接至数据接口子网的各类数据,极大的减小了可能发送至A/B/C三网的网络数据流量。
数据接口子网负责实现包括各类监视数据的接入、各类意图数据的输入输出、气象数据、各类辅助数据的输入,自动化系统和其他系统间的各类数据共享(综合航迹、飞行数据等)的数据交换,AirNet系统综合航迹、AirNet系统计划信息以及各类基础数据的输出。
数据接口子网隔离开了不同设备的通信协议变化,有助于未来添加新的外部接口设备。
2.A\B\C三网系统的运行网络划分为3套网络:A/B/C三网(LAN-A、LAN-B、LAN-C)。
A/B/C三网络均可独立运行;系统内部数据分发、同步,管制员的操作,均通过(A网、B网)冗余传输、处理,确保服务器和工作站之间的高速、稳定的数据交换;每个A、B、C网均各配置一台单独的核心交换机。
系统的各个服务器直接连接在核心交换机上。
旁路(C网)采用独立的交换机,冗余的旁路监视数据处理服务器直接接入独立的旁路接口子网,以解决A/B网瘫痪后信号、计划数据的不间断向席位分发的问题;C网同时也作为记录回放专用网,采用独立于A/B双网的模式,该网用于记录回放数据的传输,保障了记录、回放及屏幕数据的清晰、高效、快速。
一种民航空管自动化系统告警信息采集工具的设计与实现【摘要】空管自动化系统作为民航空管实施对空指挥的核心系统,在行业中占据着重要的地位,为此保障系统的稳定运行尤为重要。
目前自动化系统的状态和告警信息众多,技术保障部门面对繁多的系统告警,存在遗漏系统重要告警的风险,为此本文设计并开发了一种针对空管自动化系统的告警信息采集分类工具,为技术保障人员提供清晰且有效的告警提示,以保障系统的稳定运行。
关键词:空管自动化系统;技术保障;告警信息;采集工具;1概述随着民航业的快速发展,航班流量急剧增长,民航空中交通流量日益繁忙,空管自动化系统作为空管实施对空指挥的核心系统,在空中交通管制中占据着重要的地位,为此保障系统的稳定运行尤为重要。
目前,国内主流的自动化系统有欧洲猫、华泰、莱斯和二所等,操作系统为Linux或Unix的分布式系统,系统的关键节点众多,设备运行的状态和告警信息繁杂,给技术保障部门带来巨大的运行维护压力。
以广州现场为例,目前有塔台管制现场、终端管制现场和区域管制现场,均备有2套自动化系统,主用为欧洲猫系统,备用为莱斯系统,服务器和席位节点多达上千个;在日常维护过程中,系统的状态信息和告警信息繁杂,部分状态和告警信息级别较低,繁多的告警提示容易造成设备运维人员的感觉疲劳,存在遗漏系统重要告警的风险。
为此,本文设计提出一种针对空管自动化系统的告警信息采集分类工具,通过提取自动化系统的告警日志信息,并根据设备保障部门对自动化系统的告警需求进行分类,为值班现场提供高效准确地声光告警提示。
2设计与实现采集工具分为两个部分,一部分为自动化系统的监控节点端的脚本程序,另一部分为告警信息采集分析告警程序,数据流程:脚本程序单向发送告警信息至采集程序,由告警信息采集分析程序实现具体的分类和声光告警提示,自动化系统和采集程序间采用防火墙作安全隔离。
2.1空管自动化系统端脚本空管自动化系统为Linux系统或Unix系统,采集脚本程序为Shell脚本或Python脚本。
龙源期刊网 DUP抑制区域告警设置作者:宋玉华来源:《科学大众》2019年第09期摘 ; 要:文章重点讲述了空管自动化系统DUP抑制区域告警的设置,阐述了RVSM功能的基本原理,分析了其功能和功能应用的要求。
关键词:RAIW;RDP;FDP抑制区域闯入警告(Restrain Area Invading Warning,RAIW)的目的是允许系统管理员在空域内指定限制的区域。
系统的RAIW功能使用这些限制区域来确定如果飞机(航迹)位于限制区域,则经视觉和听觉警报通知管制员,令其采取适当的动作。
每一个RAIW区域定义为一个有底和顶高度,由3~16个顶点组成的封闭多边形的三维区域。
系统最多可定义16个RAIW多边形区域,每一个多边形的顶点由它的纬度和经度定义,从第一个顶点到最后一个顶点组成封闭的多边形。
RAIW区域多边形不应重叠,边线不能交叉。
顶高:任何未过滤出的飞机将提供给管制员一个告警,报告的高度位于或低于顶高,位于或高于底高。
底高:任何未过滤出的飞机将提供给管制员一个告警,报告的高度位于或低于顶高,位于或高于底高。
1 ; ;RAIW航迹排除从RAIW检查中排除航迹,不使用配置或排除文件。
排除每一航迹都需要在本DP席位上手动进行。
为了从RAIW功能中排除航迹,现场管制员要从DP席位上的呼号菜单中选取要排除的航迹。
一旦排除后,RAIW计算将不再考虑此航迹的影响。
若此航迹先前已经加上了RAIW标志,马上会重新设置且RAIW标志将消失。
排除后也可通过呼号菜单再选用它。
2 ; ;RAIW区域排除从RAIW计算中排除整个区域,不使用配置或排除文件。
可以在主任管制席位上对每一个区域进行动态的排除。
为了在RAIW功能下排除一个RAIW区域,管制员必须在席位上以主任身份登录,并从系统地图窗口中调出RAIW窗口。
每一个区域都可选来排除。
一旦选为排除后,未激活的RAIW区域地图图形将从DP上消失,RAIW功能将不再考虑穿过此区域的所有。
THALES空管自动化系统CLAM告警的处理机制和调查作者:王曦民来源:《数字技术与应用》2014年第04期摘要:目前,北京、上海、广州三地民航区域管制中心使用的空管自动化系统是THALES 公司的Eurocat-X系统。
该系统为管制员保障航空安全和提高运行效率发挥了重要的作用,告警功能是其中的重要组成部分。
本文研究通过分析系统记录日志调查雷达信号处理和飞行计划处理的结果,其中着重介绍了告警功能中的高度一致性告警(CLAM)的原理及其调查方法,加深对高度一致性告警的理解。
同时指出相关的告警参数,读者可通过对相关参数的修改,在保障安全和减少虚警之间找到平衡。
关键词:THALES Eurocat-X CLAM 高度一致性告警中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2014)04-0067-03空中交通管理自动化系统是保障航空安全、高效运行的重要工具。
告警功能是其中的重要组成部分。
各空管自动化系统对告警的实现方式略有不同,管制员在使用上产生很多疑问。
2004年11月,华北空管局引进THALES公司的Eurocat-X空中交通管制系统,该系统雷达信号处理、告警和飞行计划管理等功能帮助管制员提高管制效率,同时此系统提供了强大的日志记录工具帮助技术人员分析系统问题。
本文旨在介绍Eurocat-X系统CLAM告警的原理和调查方法,为技术人员提供帮助。
1 Eurocat-X 系统告警功能介绍Eurocat-X告警功能是分配在安全网和监控(SAFETY NET AND MONITORING AIDS)功能模块中。
告警具体分为以下两种类型:(1)雷达告警功能,包括:短期冲突告警(STCA)、最低高度告警(MSAW)、进近监视告警(APMW)、危险区告警(DAIW)、临时危险区告警(TDAW)。
(2)航迹飞行计划整合功能,包括:航迹与飞行计划相关、自动位置报告功能、偏航告警、高度一致性告警(CLAM)。
THALES空管自动化系统MSAW告警的原理和调查于琳【摘要】本文主要介绍了THALES公司的Eurocat-X系统中的MSAW告警功能,MSAW告警是最低安全高度告警的简称,这个功能是当系统探测到飞行器在一个预设的时间间隔后将要进入到预先设定的MSAW区域时,给相关的管制员做提醒。
通过对MSAW原理讲解以及案例调查,技术人员可以方便的通过日志查询分析关于MSAW告警的各种问题。
【期刊名称】《数字技术与应用》【年(卷),期】2015(000)001【总页数】1页(P47-47)【关键词】THALES;Eurocat-X;MSAW;告警区域【作者】于琳【作者单位】中国民用航空华北地区空中交通管理局北京 100621【正文语种】中文【中图分类】V355.1Eurocat-X告警功能是分配在安全网和监控(SAFETY NET AND MONITORING AIDS)功能模块中。
告警具体分为以下两种类型:(1)雷达告警功能,包括:短期冲突告警(STCA)、最低高度告警(MSAW)、进近监视告警(APMW)、危险区告警(DAIW)、临时危险区告警 (TDAW)。
(2)航迹飞行计划整合功能,包括:航迹与飞行计划相关、自动位置报告功能、偏航告警、高度一致性告警 (CLAM)。
2.1 MSAW告警功能介绍MSAW告警是最低安全高度告警的简称,这个功能是当系统探测到飞行器在一个预设的时间间隔后将要进入到预先设定的MSAW区域时,给相关的管制员做提醒。
最低安全高度告警功能,综合飞行器的航迹高度、飞行状态(上升或下降)、位置和飞行方向以及MSAW区域信息判断,如果预测到飞行器将要进入相对应的MSAW区域时,可以通知对应的管制员。
2.2 MSAW告警区域MSAW告警区域通过离线定义,并分为两种类型:地表危险物和障碍物。
地表危险物(TERRAIN_HAZARD)是矩形的地理区域。
每个矩形区域使用完整的马赛克方格,方格的大小是由RDF_MSA W_RESOL这个系统参数设定。
link appraisement
中国民用航空中南地区空中交通管理局技术保障中心
图1 STCA告警区与抑制区图示
中国科技信息2019年第6期·CHINA SCIENCE AND TECHNOLOGY INFORMATION Mar .2019◎航空航天ELIGIBILITY 设为COUPLED_FPL 时,飞行计划须处在“CONTROLLED”或“HANDED -OVER”以及“HANDED -OVER FIRST”状态。
当源航迹与目标航迹确定后,系统告警模块开始进行STCA 告警计算。
根据系统当前水平位置、高度、速度、爬升率,在一个预设的前探时间STCA_LOOK_AHEAD_TIME 后,算出源航迹将要达到的位置。
当源航迹位置确定后,系统根据前探时间与航迹最大速度算出位于同一mosaic 单元与邻近mosaic 单元里的目标航迹。
对符合筛选条件的源航迹之间或者源航迹与目标航迹之间,分别计算出两航迹在水平方向上小于预设值STCA_FINE_PLANNER_SEP 的时间段与垂直方向上小于预设值的时间段,并计算出两时间段的重叠时间,开始重叠的时间被视为冲突开始时间,重叠的时间段为冲突时间段。
垂直方向的预设值根据航迹所在的高度而定,以STCA_ALT_SEP_THREHOLD 为分界线,在分界线以上的采用STCA_ALT_SEP_HIGH 值为最小间隔值,分界线以下则采用STCA_ALT_SEP_LOW 为告警阈值。
对具有RVSM 能力的航班来说,还要求航迹位于RVSM 区域,且高度不高于STCA_RVSM_VERTICAL_LIMIT。
当两航迹位于不同的间隔定义区域,采用不同的间隔定义标准时,采用间隔较小的标准。
为减少错误预警产生的几率,对垂直方向的预测采用高度层保护。
对航班下达指令高度CFL 后,当航班位置处于[CFL -SNMAP_MAX_LEVEL_OVERSHOOT,CFL+SNMAP_MAX_LEVEL_OVERSHOOT]高度区间内时,航班在垂直方向上的预测,向上不能超出CFL+SNMAP_MAX_LEVEL_OVERSHOOT,向下不能低于CFL -SNMAP_MAX_LEVEL_
OVERSHOOT。
当航班位置在上述区间以外时,视为穿过了CFL 高度保护层,则若航班位置低于CFL -SNMAP_MAX_LEVEL_OVERSHOOT,向下预测不受高度保护层限制,向上预测不能高于CFL+SNMAP_MAX_LEVEL_OVERSHOOT;若航班位置高于CFL+SNMAP_MAX_LEVEL_OVERSHOOT,向上预测不受高度保护层限制,向下预测不能低于CFL -SNMAP_MAX_LEVEL_OVERSHOOT。
当航班爬升率/下降率大于STCA_RATE_THRESHOLD,且航班位置在[CFL -STCA_LEVEL_THRESHOLD/2, CFL+STCA_LEVEL_THRESHOLD/2]高度区间时,视为不受高度保护层限制。
当航班水平或垂直距离大于预设值后,视为冲突解除。
MSAW 告警
MSAW 告警,即最小安全高度告警(Minimum Safe Altitude Warning),指在一定的前探时间后,航迹高度低于预设的MSAW 区域的最小安全高度。
MSAW 的告警区域有两种定义方式,分别是:
地形类,以矩形的区域定义基本单元,分别划定西南和东北两个定点的经纬度。
共可定义MSAW_RESOL 个单元,
每个单元都有相应的最低安全高度。
障碍物类,以圆柱体定义告警区域,每个圆柱体都有中心点、半径与最低安全高度。
再将不同的圆柱体相重叠模拟出一个接近实际的障碍区域。
当系统参数MSAW_ELIIBILITY 设为ALL 时,可参与
系统MSAW 计算的航迹要满足下列条件:
1、航迹不位于MSAW 抑制区内。
2、航迹的二次代码不属于抑制二次代码组。
3、航迹具有有效高度,包括C 模式高度或者当
MSAW_USE_RRL 时设为TRUE 时的手动输入高度
RRL。
若MSAW_ELIGIBILITY 设为COUPLED_FPL,则
符合MSAW 计算要求的航迹除上述条件外,还需满足:
1、航迹与飞行计划相关且处于下列状态:
“CONTROLLED”、“HANDED -OVER”、“HANDED -
OVER FIRST”。
2、航迹航班号不属于抑制航班号。
3、当MSAW_VFR_ACT 设为TRUE 时航迹不是
VFR 航迹,且当MSAW_IFR_ACT 设为TRUE 时航迹不
是IFR 航迹。
当MSAW_HOLD_STATE_ELIG 设为TRUE 时,
相关航迹不能处于HOLD 状态。
每隔MSAW_UPDATE_PERIOD 个雷达航迹更新周
期,进行一次MSAW 告警计算。
系统内设置一个系统冗余缓冲值,称为垂直安全边
界,作为计算MSAW 时,航班在告警区之上时的高度限
制。
对VFR 航迹,该值为MSAW_VFR_ALTITUDE_
MARGIN,对IFR 航迹,该值为MSAW_IFR_
图2 STCA 水平冲突图示图3 STCA 垂直冲突图示图4 MSAW 告警限制图示(下转第37页)
CHINA SCIENCE AND TECHNOLOGY INFORMATION Mar .2019·中国科技信息2019年第6期航空航天◎
改进方案a)将拉杆截面尺寸由LY12Φ40×1mm 更改为
2A12Φ32×1.5mm。
b)将摇臂R1倒角改为R3,倒角位置移到靠近耳片;
将侧边厚度由3mm 改为5mm。
更改前后摇臂对比如图9
所示。
改进方案验证
为验证某型机操纵拉杆调频效果是否达到预期目标,对
某型机进行了拉杆原状态和新状态的装机动特性试验和飞行
振动对比测试。
a)操纵拉杆更改前后垂向和侧向机频响曲线如图8所示。
(绿色曲线对应原状态,红色曲线对应新状态)由图8可知拉杆更改后,垂向装机频率由55.78Hz 降低到43.92Hz, 侧向装机频率由47.64Hz 降低到39.41Hz,更改后的实测装机频率避开了尾桨频率(53.6Hz)10%以上,达到了预期的调频目标。
b)操纵拉杆更改前、后的尾桨53.6Hz 频率下的振动水平对比如图11所示。
由图9可知拉杆更改后,在尾桨53.6Hz 频率下的振动水平最大值由更改前的约51g 下降到2g 以内,较更改前有图7 摇臂更改前后对比
图8 操纵拉杆更改前后的频响曲线对比
图9 操纵拉杆尾桨频率的振动水平对比
明显降低。
故拉杆进行调频更改后,能明显降低53.6Hz 频率下的振动水平,即能明显降低拉杆对摇臂的振动载荷。
结语
对某型机摇臂裂纹故障从原因分析、原因排查、原因定位、机理分析后确定了故障原因并提出了改进方案,并对改
进方案进行了地面动特性试验和飞行振动测试试验,试验验证改进方案效果明显,合理可行,因此该问题已经得到圆满
解决。
该问题的出现、排故分析及解决过程为以后外场排故工作提供了参考。
ALTITUDE_MARGIN。
对地形类告警区的MSAW 告警,系统根据预定义的MSAW 告警区域,计算前探时间MSAW_LOOK_AHEAD_TIME 后可能经过的存在潜在危险的告警区域。
告警区域确定好后,系统根据当前高度与航班爬升/下降率,算出前探时间后航迹将会达到的高度,与告警区域所有基本单元的最大限高(即单元最低安全高度+垂直安全边界)作比较,确定垂直方向上产生冲突的时间段。
下一步,系统根据当前水平位置、速度矢量,算出前探时间后航迹将要达到的水平位置,计算航迹的预测向量与危险区在水平方向上的相交点,从而算出水平方向上的冲突开始时间与冲突时间段。
最后,垂直与水平冲突重叠的时间段视为MSAW 告警的时间段。
障碍物类告警区的MSAW 告警计算与地形类告警区类似。
MSAW 告警同样设有高度层保护。
对下降航迹,前探高度限制设为CFL -SNMAP_MAX_LEVEL_OVERSHOOT,当航迹高度低于CFL -SNMAP_MAX_LEVEL_OVERSHOOT,视为已穿越保护高度层,前探预测不再受限制。
当航迹下降率大于MSAW_RATE_THRESHOLD,且航迹位置在[CFL -MSAW_LEVEL_
THRESHOLD/2, CFL+MSAW_LEVEL_THRESHOLD/2]高度区间时,航迹前探预测不受高度层保护限制。
当经过前探时间后探测到航迹不再处于告警区时,将对告警解除计数器M 进行更新。
如果连续n 个MSAW_UPDATE_PERIOD 告警周期都没有检测到MSAW 告警,则M=(n - 1)*MSAW_UPDATE_PERIOD + 1。
当M>=MSAW_INTENSITY_THRESHOLD 时,视为冲突解除。
当告警再次被探测到,则M=0。
小结
STCA 告警和MSAW 告警是民航空管自动化系统中不可缺少的两项告警。
本文以欧洲猫空管自动化系统为例,阐
述了产生两项告警的先决条件和告警的处理过程。
目前两项告警已经达到相当高的精度和准确度,且系统设置的保护机制大大减少了误警的概率。
相信随着空管业务的不断发展,两项告警还将继续为捍卫蓝天安全、保障空中交通正常运行、减少飞行事故作出更大的贡献。
(上接第34页)。