CMAC(神经网络)与PID
- 格式:doc
- 大小:135.00 KB
- 文档页数:4
高空作业平台CMAC网络PID并行优化控制及协同仿真李帅;魏建华
【期刊名称】《机械科学与技术》
【年(卷),期】2010(029)004
【摘要】高空作业平台调平系统是一个复杂非线性系统,作业环境非常复杂且受到很多干扰.针对此提出了基于干扰观测器和RC滤波的CMAC神经网络PID并行控制的策略.以某型54 m高空作业平台电液比例调平系统为例,以AMESim仿真软件作为主仿真环境,通过软件接口将MATLABSimulink控制系统模型集成到AMESim中进行协同仿真.结果表明:与传统CMAC网络PID并行控制以及单纯PID控制相比较,改进的并行控制对负载扰动和模型失配表现出更强的适应性和鲁棒性,而且不论在任何阶段,都具有良好的跟踪效果.
【总页数】5页(P537-541)
【作者】李帅;魏建华
【作者单位】浙江大学流体传动及控制国家重点实验室,杭州310027;浙江大学流体传动及控制国家重点实验室,杭州310027
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.基于CMAC(神经网络)与PID的并行控制 [J], 肖蕙蕙;李川
2.基于CMAC神经网络与PID并行控制的汽车电动助力转向系统 [J], 李伟;李鸿
炜
3.复合正交神经网络与CMAC在PID并行控制中的比较研究 [J], 叶军
4.基于改进的CMAC神经网络与PID并行控制的研究 [J], 张伟;朱大奇;孔敏;李武朝
5.PMSM调速系统CMAC网络PID并行优化控制 [J], 屈百达;王哲
因版权原因,仅展示原文概要,查看原文内容请购买。

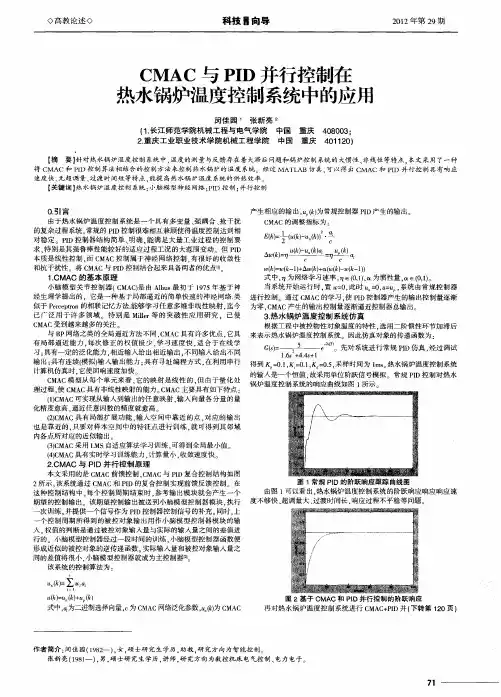
基于CMAC神经网络的PID参数自整定方法的研究0引言控制器的参数整定是通过对PID控制器参数(KP,KI,KD)的调整,使得系统的过渡过程达到满意的质量指标要求。
PID参数的整定一般需要经验丰富的工程技术人员来完成,既耗时又耗力,加之实际系统千差万别,又有滞后非线性等因素,使PID参数的整定有一定的难度,致使许多PID控制器没能整定的很好;这样的系统自然无法工作在令人满意的状态,为此人们提出了自整定PID控制器。
将过程动态性能的确定和PID控制器参数的计算方法结合起来就可实现PID控制器的自整定[1,2]。
笔者设计出一种基于CMAC小脑模型神经网络的PID参数自整定的控制系统,从而实现PID参数的快速整定,并且使得PID的参数整定达到一定的精度。
1CMAC神经网络CMAC(Cerebellarmodelarticulationcontroller)是J.S.Albus在1975年提出的一种模拟小脑功能的神经网络模型。
CMAC是一种联想网络,对每一输出只有小部分神经元(由输入决定)与之相关,它的联想具有局部泛化能力,即相似的输入将产生相似的输出,而远离的输入产生几乎独立的输出。
CMAC与感知器比较相似,虽然从每个神经元看其关系是一种线性关系,但从结果总体看,它适合一种非线性的映射,因而可以把CMAC看作一个用于表达非线性映射(函数)的表格系统[3]。
由于它的自适应调节(学习)是在线性映射部分,所以其学习算法是简单的算法,收敛速度比BP快得多,且不存在局部极小问题[4]。
CMAC神经网络结构如系统的工作原理为:当闭环控制系统受到扰动时,对系统误差的时间特性进行模式识别,首先得出系统误差曲线的峰值及时间,。
![神经网络模型与二次型单神经元PID并行控制方法[发明专利]](https://uimg.taocdn.com/25696302551810a6f424864a.webp)
专利名称:神经网络模型与二次型单神经元PID并行控制方法专利类型:发明专利
发明人:薛阳,严振杰,易金明,叶建华,钱虹,杨旭红
申请号:CN200910198718.5
申请日:20091113
公开号:CN101727071A
公开日:
20100609
专利内容由知识产权出版社提供
摘要:本发明涉及一种神经网络模型与二次型单神经元PID并行控制方法,CMAC神经网络模型输入为设定值rin,输出为u;二次型单神经元PID的输入为误差e,即控制输入rin与输出测量值yout 的差,二次型单神经元PID的输出为u;控制器总输出为u=u+u,利用CMAC神经网络具有学习算法简单、收敛速度快、局域泛化等优点,同时把二次型性能指标的思想,神经元非线性映像和权值的自适应修正功能引入到PID控制器,由CMAC控制器实现前馈控制,二次型单神经元PID控制实现反馈控制,针对系统中的非线性、不确定性和复杂性,提高系统控制的稳定性,也提高了系统的抗干扰能力。
申请人:上海电力学院
地址:200090 上海市杨浦区平凉路2103号
国籍:CN
代理机构:上海申汇专利代理有限公司
代理人:吴宝根
更多信息请下载全文后查看。
CMAC神经网络与PID复合控制在温度控制中的应用
本文旨在讨论CMAC神经网络和PID复合控制在温度控制中的应用,讨论如何利用现有的CMAC神经网络与PID复合控制技术,实现更高效的温度控制。
CMAC神经网络是一种被广泛应用在自动控制应用中的神经网络技术,其能够以比传统神经网络更快的速度和更低的误差较好地实现对控制参数的学习。
传统的PID控制方式无法较好地处理复杂的非线性系统,而CMAC神经网络可以快速准确的完成复杂的控制,并且可以根据运行条件的变化而调整参数,因此,CMAC神经网络在温度控制中受到了越来越多的应用。
在温度控制的应用中,CMAC与PID相结合的控制方法具有较高的效率。
在采用CMAC-PID复合控制时,PID算法先计算出系统当前温度误差以及温度变化率,然后通过CMAC网络调节PID系统的参数,实现对复杂非线性系统温度的精确控制;CMAC算法通过实时调节PID系统参数,使PID系统容易控制复杂非线性系统,最大限度提高效率。
因此,采用CMAC-PID复合控制的技术能够更好地实现温度的控制,提高控制效果。
最后,虽然CMAC神经网络与PID复合控制在温度控制中取得了良好的效果,不过这种技术还需要进一步的研究来提高精度、稳定性及功率的利用效率。
为了进一步提高CMAC-PID 复合控制的效率,我们可以对控制系统进行系统建模,提高控
制系统的性能,进行有效可靠的温度控制,从而达到更好的控制效果。
收稿日期:2012-07-30基金项目:2012年度广西教育厅科研课题项目(201204LX556)。
作者简介:敖茂尧(1980-),男,重庆市人,硕士,讲师,研究方向:制造业自动化与智能控制。
基于CMAC 与PID 的复合控制在CNC 伺服系统中的仿真研究敖茂尧(广西职业技术学院机械与汽车技术系,南宁530226)摘要:针对CNC 伺服系统存在非线性、多变量、强耦合的特点,在分析其控制原理与数学模型的基础上,结合PID 控制与CMAC 的优点,提出了一种新型的CMAC 与PID 复合控制方法,并应用于CNC 伺服系统中。
通过Simulink 建模与仿真,最终实验结果表明相对于传统PID 控制,CMAC 与PID 复合控制具有更好的实时性、鲁棒性,超调量更小,控制精度更高。
关键词:CNC 伺服系统;PID ;CMAC 中图分类号:TP137文献标识码:A文章编号:1001-7119(2013)04-0017-04Simulation Research of Compound Control in CNCServo System Based on CMAC and PIDAo Maoyao(Department of Machinery,GuangXi Vocational &Technical College ,Nanning 530226,China )Abstract:Aim at the CNC Servo Systems with nonlinear,multivariable and strong coupling characteristics,this paper proposed a new type of compound control method based on the analysis of control principle and mathematical model.This new compound control method combined the advantage between PID control and CMAC,and was used in CNC Ser -vo Systems.Through the Simulink modeling and simulation ,the experimental results indicated the compound control between CMAC and PID had better real-time performance,robustness,smaller overshoot,and higher control accuracy than traditional PID control.Key words:CNC servo system;PID;CMAC0引言伺服系统是一种位置随动与定位系统,是CNC (数控机床)的重要组成部分,其主要作用是控制机床各个轴移动的方向、位移与速度。
CMAC(神经网络)与PID混合控制器的设计
1、CMAC概述
小脑模型神经网络(CMAC—Cerebellar Model Articulation Controller)是一种表达复杂非线性函数的表格查询性自适应神经网络,该网络可通过学习算法改变表格的内容,具有信息分类存储能力。
CMAC把系统的输入状态作为一个指针,把相关信息分布式的存入一组存储单元。
它本质上是一种用于映射复杂非线性函数的查表技术。
具体作法是将输入空间分为许多分块,每个分块指定一个实际的存储器的位置;每个分块学习到的信息分布地存储到相邻分块的位置上;存储单元通常比所考虑问题的最大可能输入空间的分块数少的多,故实际的是多对一的映射。
CMAC已被公认为是一类联想记忆神经网络的重要组成部分,它能够学习任意多维非线性映射。
CMAC算法可有效地用于非线性函数逼近、动态建模、控制系统设计等。
CMAC较其他神经网络的优越性体现在:
(1)它是基于局部学习的神经网络,它把信息存储在局部结构上,使每次修正的权值很少,在保证函数非线性逼近的前提下,学习速度快,适合于实时控制;
(2)具有一定的泛化能力,即所谓相近输入产生行进输出,不同输入给出不同输出;
(3) 连续(模拟)输入、输出能力;
(4) 寻址编程方式,在利用串行计算机仿真,它可使回响速度更快;
(5)作为非线性逼近器,它对学习数据出现的次序不敏感。
由于CMAC所具有的上述优越性能,使它比一般的神经网络具有更好的非线性逼近能力,更适合于复杂环境下的非线性实时控制。
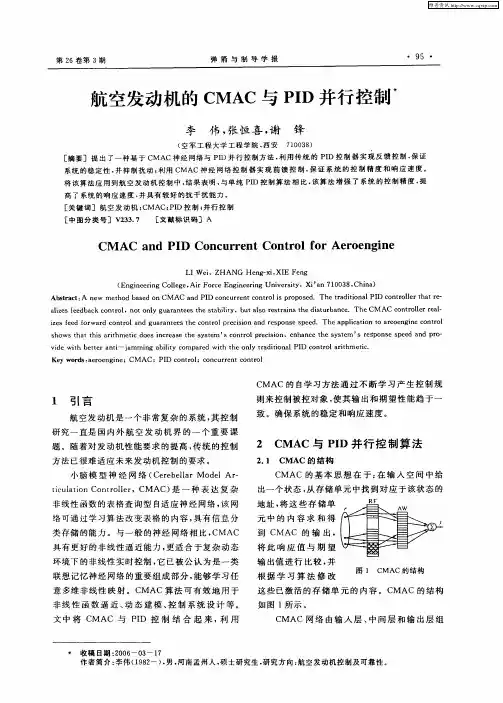
CMAC的基本思想在于:在输入空间给出一个状态,从储存单元中找到对应于该状态的地址,将这些存储单元的内容求和得到CMAC的输出;将此响应值与期望输出值进行比较,并根据学习算法修改这些已激活的存储单元的内容。
图1 CMAC结构图
CMAC的设计方法分为以下三步:
(1)量化(概念映射)
在输入层对N维输入空间进行划分,每一个输入都降落到N维网络基的一个超立方体单元内。
中间层由若干个判断区间构成,对任意一个输入只有少数几个区间的输出为非零值,非零值区间的个数为泛化参数c,它规定了网络内部影响网络输出的区域大小。
(2)地址映射(实际映射)
采用除余数法,将输入样本映射至概念存储器的地址,除以一个数,得到的余数作为实际存储器的地址值。
即将概念存储器中的c 个单元映射至实际存储器的c 个地址。
(3) CMAC 的函数计算(CMAC 输出)
将输入映射至实际存储器的c 个单元,每个单元中存放着相应权值,CMAC 的输出为c 个实际存储器单元加权之和。
CMAC 的结构图如图1所示。
2、一种典型的CMAC 算法
CMAC 网络由输入层、中间层和输出层组成。
在输入层与中间层、中间层与输出层之间分别为由设计者预先确定的输入层非线性映射和输出层权值自适应线性映射。
在输入层,对n 维输入空间进行划分。
中间层由若干个基函数构成,对任意一个输入只有少数几个基函数的输出为非零值,称非零输出的基函数为作用基函数,作用基函数的个数为泛化参数c ,它规定了网络内部影响网络输出的区域大小。
CMAC 神经网络的设计主要包括输入空间的划分、输入层至输出层非线性映射的实现及输出层权值学习算法。
CMAC 是前馈网络,输入、输出之间的非线性关系由以下两个基本映射实现。
2.1概念映射(AC U →)
概念映射是输入空间U 至概念存储器AC 的映射
设输入空间向量T
np p p p u u u u ],...,,[21=,量化编码为][p u ,输入空间映射至AC 中c 个存储单元(c 为二进制非零单元的数目)。
采用下式表示映射后的向量 T p n p p p p u s u s u s u S R )](),...,(),([])([21==
式中,c j u S p j ,...,2,1,1])([==。
映射原则为:在输入空间邻近的两个点(一个点表示但输入的n 维向量),在AC 中有部分的重叠单元被激励。
距离越近,重叠越多;距离越远,重叠越少。
这种映射称为局部泛化,c 为泛化参数。
2.2实际映射(AP AC →)
实际映射是由概念存储器AC 中的c 个单元用编码技术(如杂散编码)映射至实际存储器AP 的c 个单元,c 个单元中存放着相应权值。
网络的输出为AP 中c 个单元的权值之和。
若只考虑单输出,则输出为
∑===c
j p j j u s w y 1
])([
即
∑===c
j j w y 1
CMAC 采用的学习算法如下:采用学习规则调整权值,权值调整指标为
2)(21t e c
E = 式中,)()()(t y t r t e -=。
由梯度下降法,权值按下式调整
T
c p j j j j j j j j w w w w t w t w t w t w t w c
t e w y c t y t r w E t w ],...,,[))2()1(()()1()()())()(()(21=---+∆+-==∂∂-=∂∂-=∆αηηη
式中,α为惯性系数。
3、CMAC 与PID 复合控制算法
CMAC 一开始就被应用于机器人控制中,目前有多种控制形式,如CMAC 直接逆运动控制、CMAC 前馈控制、CMAC 反馈控制等,本书采用的是CMAC 前馈控制。
CMAC 与PID 复合结构图如图2所示,该系统通过CMAC 和PID 的复合控制实现前反馈控制,其特点为:
图2 CMAC 与PID 复合控制结构图
第一,小模型神经控制器实现前馈控制,实现被控对象的逆动态模型;第二,常规控制器实现反馈控制,保证系统的稳定性,且抑制扰动;此外,CMAC 控制算法虽然是由PID 控制器的输出训练的,但并不是PID 控制器的简单复制。
加入PID 控制器是为了评判CMAC 控制器的性能,增强系统的稳定性,抑制扰动。
PID 单独控制时,p k 增益的值在很大程度上决定着控制效果,而采用CMAC 和PID 混合控制时控制效果不依赖于p k 的值,p k 的值只需在一个合理的范围里即可。
CMAC 采用有导师的学习算法。
每一控制周期结束时,计算出相应的CMAC 输出 )(k u n ,并与总控制输入)(k u 相比较,修正权重,进入学习过程。
学习的目的是使总控制输入与CMAC 的输出之差最小。
经过CMAC 的学习,使系统的总控制输出由CMAC 产生。
而常规控制器采用传统的PD 算法而不用PID 控制算法,使CMAC 的学习仅仅依赖于误差的当时测量值及变化值。
该系统的控制算法为:
∑==c
i i i n a w k u 1)(
)()()(k u k u k u p n +=
式中,i a 为二进制选择向量,c 为CMAC 网络的泛化参数,)(k u n 为CMAC 产生相应的输出,)(k u p 为常规控制器PID 产生的输出。
每一控制周期结束时,CMAC 输出)(k u n 与总控制输出)(k u 相比较,修正权重,进入学习过程。
学习的目的是使总控制输入与CMAC 的输出之差最小,即使系统的总控制输出主要由CMAC 控制器产生。
CMAC 的调整指标为
))1()(()()1()()()()()())()((21)(2--+∆+-==-=∆⋅-=
k w k w k w k w k w a c
k u a c k u k u k w c
a k u k u k E i p i n i
n αηη 式中, η为网络学习速率,)1,0(∈η ,α为惯性量,)1,0(∈α。
当系统开始运行时,置0=w ,此时0,0==p n u u ,系统由常规控制器进行控制。
通过CMAC 的学习,使PID 产生的输出控制量)(k u p 逐渐为零,CMAC 产生的输出控制量)(k u n 逐渐逼近控制器总输出)(k u 。
参考书目:
1、刘金琨。
智能控制 ,电子工业出版社,北京 ,2005.5。
2、刘金琨。
先进PID 控制及其MATLAB 仿真,电子工业出版社,北京 ,2003.1。