挖掘机负载敏感系统介绍(中文)
- 格式:doc
- 大小:840.00 KB
- 文档页数:8
第16卷 增刊石家庄铁道学院学报V o l116 Supp1 2003年7月 JOU RNAL O F SH IJ I A ZHUAN G RA I L WA Y I N ST ITU TE Ju l12003液压挖掘机的负荷传感技术王满增1, 祖炳洁2, 贾粮棉2(11石家庄铁道学院教务处,河北石家庄 050043; 21石家庄铁道学院机械工程分院,河北石家庄 050043)摘要:以日本小松PC25液压挖掘机为例,系统分析液压负荷传感技术应用于挖掘机液压泵中,使泵的输出流量自动调节,减少压力损失,提高工作效率。
重点论述负荷传感器的工作原理。
关键词:挖掘机;负荷传感技术;流量控制中图分类号:TH137 文献标识码:A 文章编号:100623226(2003)S1201282031 引言液压负荷传感技术应用于挖掘机的液压系统中,可以控制一个或多个执行元件工作,微调性能非常好;可在满足机器各种控制功能的前提下,减少了压力损失,提高效率,有更佳的经济性、可靠性和先进性。
PC25挖掘机液压系统采用开式中心负荷传感系统(OL SS),该系统是以控制斜盘式柱塞泵斜盘角度的方法,根据外界负荷自动调节液压泵输出流量,以减少溢流和管路压力损失,达到提高发动机效率、节约能源的目的。
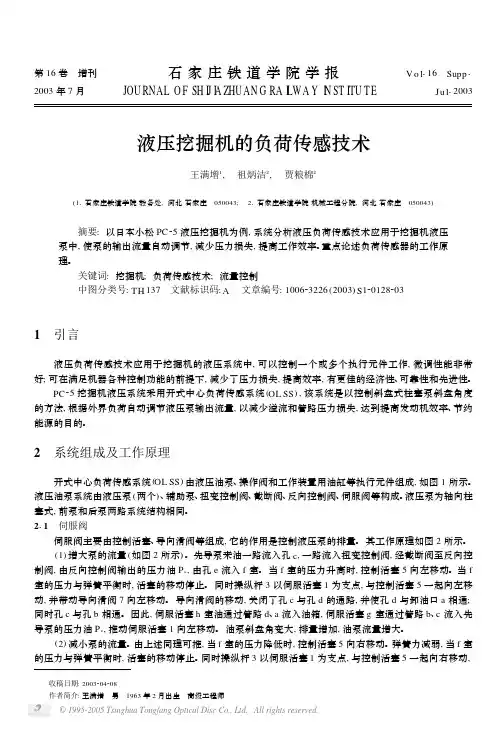
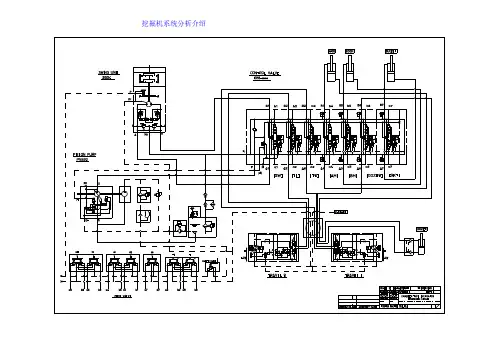
2 系统组成及工作原理开式中心负荷传感系统(OL SS)由液压油泵、操作阀和工作装置用油缸等执行元件组成,如图1所示。
液压油泵系统由液压泵(两个)、辅助泵、扭变控制阀、截断阀、反向控制阀、伺服阀等构成。
液压泵为轴向柱塞式,前泵和后泵两路系统结构相同。
211 伺服阀伺服阀主要由控制活塞、导向滑阀等组成,它的作用是控制液压泵的排量。
其工作原理如图2所示。
(1)增大泵的流量(如图2所示)。
先导泵来油一路流入孔c,一路流入扭变控制阀,经截断阀至反向控制阀,由反向控制阀输出的压力油P c,由孔e流入f室。
当f室的压力升高时,控制活塞5向左移动。
当f 室的压力与弹簧平衡时,活塞的移动停止。
负载敏感多路阀工作原理负载敏感多路阀(Load Sensitive Multiple Valve)是一种常见的液压传动元件,它可以根据系统的负载情况自动调节液压流量和压力。
它主要应用于液压系统中,可以有效地控制和调节工作装置的运动速度,提高系统的工作效率。
负载敏感多路阀的工作原理是基于流量和压力的反馈控制。
它由多个节点和一个控制器组成。
每个节点都有一个单向或双向阀门,用于控制液压流量和压力。
控制器通过感知系统的负载情况,通过调节阀门的开关状态,以达到控制液压流量和压力的目的。
当负载敏感多路阀工作时,首先需要测量系统的负载情况。
这可以通过安装传感器来实现,传感器可以测量液体的流速、压力和温度等参数。
这些数据将传输给控制器,控制器将分析这些数据并根据负载情况做出相应的调节。
根据系统的负载情况,控制器会判断是否需要增加或减少液压流量。
当系统负载较小时,控制器会适当地增加阀门的开度,以增加液压流量。
当系统负载较大时,控制器会相应地减少阀门的开度,以减少液压流量。
这样,就可以在不同的负载情况下保持适当的液压流量,以达到最佳工作状态。
另外,负载敏感多路阀还可以自动调节液压压力。
在系统负载较小的情况下,控制器会增加阀门的压力限制,以增加液压压力。
而在系统负载较大的情况下,控制器会减小阀门的压力限制,以减少液压压力。
这样,就可以在不同的负载情况下保持适当的液压压力,以确保系统的安全和稳定运行。
负载敏感多路阀还可以通过组合和联动控制多个阀门,以实现更复杂的液压系统控制。
通过调节不同阀门的开关状态和流量限制,可以精确控制工作装置的运动速度和位置。
总之,负载敏感多路阀通过感知系统的负载情况,自动调节液压流量和压力,从而提高液压系统的工作效率。
它是现代液压系统中不可或缺的重要元件,广泛应用于工程机械、农业机械、船舶等领域。
随着科技的不断进步,负载敏感多路阀将进一步发展和应用,为更多行业带来更高效、更安全的液压系统。
在现代工程领域,负载敏感多路阀扮演着举足轻重的角色。
基金项目:国家“八六三”高技术发展计划资助项目(!""#$$%#"!"")作者简介:郝鹏(&’(’)),男,宁夏中宁人,博士生*负载敏感系统测试及特性分析郝鹏,何清华,张大庆(中南大学机电工程学院,湖南长沙%&""+#)摘要:负载敏感系统是液压系统节能控制的主要环节之一*对一具有负载敏感系统的挖掘机在不同工况、不同负载压差,以及不同操作动作下泵的出口压力、流量进行了测试,分析了负载敏感系统工作特性,提出了压差的设定值应随负载的大小按正比例调节,以提高系统对负载的跟随性并减少波动*在标准负载工况下,压差设定为&*(,-.时,系统工作比较理想*关键词:负载敏感系统;节能;挖掘机;系统测试中图分类号:/0&#(!"#$%&’(&)*+(,(*$",%#$%*(&(-.#%#/0-/()1#"&#%&’#.#$"2!"#$%&’,!()*&’+,-.,/!"012.+3*&’(123345426,478.9:7.3;<347=>:7.3<95:944>:95,149=>.3?2@=8A 9:B 4>C :=D ,18.95C 8.%&""+#,18:9.)34#$,(*$:$32.E F C 49C :=:B 4C D C =4G :C .7>@7:.3494>5D F C .B :9572G H 2949=:9.8D E >.@3:7C D C =4G *$772>E :953D,=84H @G H H >4C C @>4.9E 632I26.94J 7.B .=2>I .C =4C =4E .9E .9.3D K 4E 29=84L .C :C 26E :664>49=I 2>M :95729E :=:29C,H >4C C @>4E :664>4974C .9E2H 4>.=:29H >274C C 4C */2498.974=8432.E >4C H29C :B 494C C.9E>4E @74=84H >4C C @>463@7=@.=:29,=84H >4C C @>4E :664>4974C 82@3E L 4C 4=:9H >2H 2>=:29=2=8432.E :95H>4C C @>4*N @>=84>43.L 2>.=4E ,.H >4C C @>4E :664>497426&*(,-.:C 7>:=:7.3=2=84C =.9E .>E 32.E :95729E :=:29*5".6/,)#:32.E C 49C :=:B 4C D C =4G ;494>5D C .B :9572G H 2949=;4J 7.B .=2>;C DC =4G=4C =随着社会的发展和人类的进步,人类和环境对机械产品的要求也越发苛刻,已经从功能的要求过渡到了高效、舒适性、绿色环保等性能要求*对于那些负载交替变化较明显的机械,人们更是希望所设计的动力系统既能恰如其分地满足负载的需求,又能操作舒服,动作平滑*现阶段,绝大多数的工程机械是通过液压系统来实现能量有效传输和性能的提高,而负载敏感系统恰恰是一个能够按照负载的需求来控制泵的输出功率的调节系统之一[&,!]*负载敏感系统因其节能、效率高和寿命长、控制准确、便于实现微机控制等显著优点在现代工程机械中获得了广泛的应用*日本小松公司的O P ??系统、美国卡特彼勒公司的$<1系统、韩国大宇公司的<-O ?系统及现代公司的1$-O 系统、德国奥加凯公司的-,?系统都有负载敏感功能[#,%]*负载敏感系统应该满足:不能有太大的超调量;调节时间不能太长;尽可能减少振荡*对于负载敏感系统的应用与特性分析已经有一些国内外的专家和学者进行了研究,如参考文献[#!Q ]*而对于液压挖掘机这种多机构、负载变化范围大的机械来说,负载敏感系统的分析相对较少,因此,本文针对液压挖掘机这种特种机械,工作在不同参数、不同工况以及不同操作动作下的电液负载敏感系统泵的出口压力、流量随负载及操作员的动作变化情况进行了测试并对其特性进行分析*第%卷第#期!""R 年(月中国工程机械学报10S T <?<U O A V T $P O N 1O T ?/V A 1/S O T,$10S T <V W X 23*%T 2*#U @3*!""R图!"!卸性能曲线#$%&!’()*+),-./(/0)1(+*"!图2负荷敏感泵结构简图#$%&234)0/40)(*)-,(+*5+-"67(.7$.%80,8!电液负载敏感系统的结构及工作原理电液负载敏感泵的原理图如图!所示,负载敏感阀块如图!中!"#所指虚线部分,该负载敏感系统是由泵的出口压力"$,负载最大压力""以及比例电磁铁电流#"#来控制阀芯动作,然后通过控制阀芯出口压力""#来调节泵的排量%图!中,预调弹簧$"#决定了系统泵与负载的最大压差&",通过控制比例电磁铁的电流#"#驱动比例电磁铁动作,从而达到改变&"值的目的,控制电流的大小与&"的变化成反比,即控制电流增大压差减小%由式(!),(’)可知,在同一系统中,当负载流量不超过泵的最大流量时,多路阀的&"减小意味着同样的阀芯开口面积下,通过该阀芯油路的流量将减小,同时由于&"的减小,使得在相同负载情况下泵的输出流量也相应减小,分配给每一路的流量也相应减小%从图’可以看出,当主阀的开口不变时,都处于%的位置,压差增大,泵的排量也增大,即&’!&!%在某些施工场合需要提供低速大扭矩时,可以通过减小压差来提高控制精度[(]%’(!)*!%!’&"/"!(!)’(’)*’%’’&"/"!(’)式中:*!,*’为流量系数;%!,%’为过流面积;!为油液的密度;&"为压差%通常情况下,根据泵的状态和负载的情况负载敏感系统的调节机理是不同的:当操作阀处于中位,负载压力很小,负载敏感("#)阀使泵的排量处在最小;当主泵压"$与""#压差小于设定压差时,"#阀使泵的排量增大;当主泵压"$与""#压差大于设定压差时,"#阀使泵的排量减小;当"#阀的主泵压"$、"#阀压""#与弹簧的合力平衡时,滑阀处于平衡位置[),*]%"电液负载敏感系统的测试为了能够获得更加详细的负载敏感系统的压力+流量控制特性,本文通过现场实测,获得与负载敏感系统有关的特征数据%测试对象及方法:针对某一具有负载特性的挖掘机,发动机转速设定在!,--./01+!,在空载和挖掘两种工况下,通过调节比例电磁铁的驱动电流来改变负载敏感阀两端的压差,然后测量泵的出口压力和流量%测试条件:空载时,将斗杆和铲斗伸展,然后让动臂上升和下降;在挖掘时进行复合动作%调节负载敏感系统两端压差从-%2!’%’345之间变化%测试仪器采用德国6789:;<=6>?@公司生产的多功能液压手持式测试仪(/A B C 0D E D C F /G -G -)%测试对象及连接方式如图H 所示%在泵的主油路出口处安装了一个(-345的压力传感器和一个H --"/01+!的流量计分别测试泵的出口压力"$和输出流量’$;同时在多路阀通向泵"#油路上安装了一个(-345的压力传感器,测试负载压力""#%传感器的安装如图)所示%液压系统的压力和流量测量通过测试仪器经过9#’H ’+I #J 口与笔记本电脑连接进行传输和保存%采样周期为!-/D ,采集时间为!/01,可以随时停止%的处理和显示通过K E &.L M 01H ’+F 1N B 0D K 得到%,!H 中国工程机械学报第)卷图!测试现场连接图"#$%!&’(()*+#($,#$-.)’,+)/+,#)01图2传感器的安装图"#$%23(/+4004+#’(’,/)(/’./测试数据及分析:空载工况下,压差分别为!"!,#"$,#"%,#"&,#"#’()时的压力*流量波动如图&!+,挖掘工况下压力*流量如图#,所示"图&:调节比例电磁铁电流,使得设定压差为!"!’()"驾驶员相对柔和地操作动臂的先导手柄,首先让动臂升起,然后操作手柄回到中位,最后再使动臂下降,主阀芯开口缓慢变化,且在此过程中阀芯只有#/-开口"在低压区,也就是下降过程中!#—"#段,压差相对上升过程##—$#段略高些%高压区的波动比低压区的波动大些,在&点处压力刚好推动动臂动作,因此出现了压力峰值%图%:调节比例电磁铁电流,使得设定压差为#"$’()"驾驶员让动臂升起,操作速度比图&略快,主阀芯半开口"泵仅仅是小流量时,泵的压力已经紧跟最大负载压力快速上升,.,/0左右的时间泵和负载的压力几乎达到了整个工作过程的最大压力"泵的出口流量在#点也有波动,然后缓慢地增加%此时由于负载比较平稳,从$#点以后1’几乎维持不变"图5空载,压差为6%6784的压力9流量图"#$%5&-.:)’,;.)//-.)<,0’=,(’0’41,1#,,).)(+#40;.)//-.)#/6%6784图>空载,压差为?%@784的压力9流量图"#$%>&-.:)’,;.)//-.)<,0’=,(’0’41,1#,,).)(+#40;.)//-.)#/?%@784图$:调节比例电磁铁电流,使得设定压差为#"%’()"驾驶员操作动臂的先导手柄比较快,主阀芯开口变化比较快,阀芯最大只有!/-开口"系统刚开始压力上升很快,从#—$段,流量比较小,当压力平稳后,从"—&段,流量突然从&上升到(点,系统稳定%同样可以看出低压区的压差相对高压区高些%图2:调节比例电磁铁电流,使得设定压差为#"&’()"驾驶员相对柔和地操作动臂的先导手柄,当动臂缓慢上升时,将手柄打到头然后回位,动臂继续上升,然后操作手柄反向使动臂下降,主阀芯在位置切换处比较快,主阀芯全开口"在上升阶段,流量有明显波动,但压力依然很平稳"在中位切换时,流量突然切断,泵的出口压力突然憋起,压力有明显波动,从压差的$#—!#段可以看出这一点"同样低压区的波动比高压区的波动小"图+:调节比例电磁铁电流,使得设定压差为#"#’()"驾驶员让动臂升起,主阀芯首先处于小开口,泵仅仅提供小流量,泵的压力已经紧跟最大负载压力快速上升,从#点到$点只用了-&/0左右的时间,然后经过一段波动后到达稳定点!点"+#-第-期郝鹏,等:负载敏感系统测试及特性分析图!空载,压差为"#$%&’的压力(流量图)*+#!,-./0123.044-.052617,8161’9,9*220.08:*’63.04-.0*4"#$%&’图;空载,压差为"#<%&’的压力(流量图)*+#;,-./0123.044-.052617,8161’9,9*220.08:*’63.044-.0*4"#<%&’图!":现场进行软土挖掘作业#在挖掘过程中,操作手柄位置不变,缓慢地减小电流,使得压差逐渐增大,!$口和!%&口的压差逐渐增大,泵出口的流量也在增大#在"!—#!段,调节速度加快,压差和流量相应增大很快,从#!—$!段突然增大电流,泵的出口流量也突然降低,泵的出口压力降低,负载压差减小%在$!—&!段,快速动作手柄,泵的压力随流量的波动不是很明显%同样,在’!点和(!点突然增大减小电流,压差和流量都出现了明显的波动%图=空载,压差为"#"%&’的压力(流量图)*+#=,-./0123.044-.052617,8161’9,9*220.08:*’63.044-.0*4"#"%&’图">挖掘工况压力(流量图)*+#">,-./0123.044-.052617,*871.?*8+@189*:*18!结论虽然负载敏感系统已经有’"多年的历史,发展比较成熟,但是结合实际的挖掘机,能够为操作手操作提供指导的数据相对较少,本文通过调节弹簧的设定压力,改变电流来调节泵和负载的压差,同时将操作员的动作考虑进去,结合空载和实际挖掘两种典型作业工况,在不同的压差下,对泵的出口压力和流量、负载的压力进行了测试,得到以下结论:(!)从图(!!"可以看出,泵的出口压力随负载压力的跟随性比较好,几乎是同步的,压力波动也比较小,泵的压力波动比负载压力波动明显些,这主要与阀芯的开口形状和弹簧特性有关,同时可以看出压差值在高压区和低压区是不同的,压差的波动在低压区和高压区也是不同的,在高压区泵和负载压力占主导地位,低压区,弹簧压力占主导地位#(’)从图)和图!"可以看出,泵出口压力变化随流量变化不明显;但是在启动瞬间和中位切换时,由于流量特性发生变化,压力波动比较明显#从图(可以看出,当操作比较平滑时,压力波动比较平滑,这个问题主要与阀芯的中位机能有关#"’*中国工程机械学报第+卷(!)虽然在低压区压力波动比高压区的压力波动小,但低压区压力波动范围占最大压力的比重比高压区大;压差设定值较大时系统在高压区工作比较平稳,而压差设定值较小时系统在低压区工作比较平稳;压差设定值较小时泵的压力随流量的波动大,压差设定较大时泵的压力随流量的波动小,主要由于泵在"/#排量以下工作是不稳定的,所以导致这样的结果$(#)从图%可以看出,在"$&’()的设定压差的情况下,速度比率比较平缓,压力上升很快,比图&平滑,图&出现了较大的超调量$而当压差设定值比较小时,如图*所示,压力上升速度相对慢一些$计算机控制技术已经在液压系统控制和系统功率控制上发挥着越来越重要的作用,压差的电控调节只是功率控制和节能控制的一个小部分,电控调节策略的深入和细化有待进一步完善$参考文献:["]冯刚,江峰$负载感应系统原理发展与应用研究[+]$煤矿机械,,--!(*):,&.!-$[,]包海涛,严桃平$/011节能控制系统[+]$建筑机械,,--,(*):,".,,$[!]纪云锋$液压挖掘机动力系统的节能控制研究[2]$长沙:中南大学机电工程学院,,--#$[#]+345(’,26507(80$09):;<=;>=?@A :B )C D >E E 9=F B 9D ;A ;F <GH 9B I )B >)J D <:>;K D )E <G <=F K C G :61,%,"%#L %M "[(]$,--".-#."&$[L ]米智楠,易孟林,皱占江,等$挖掘机中的负荷传感液压系统操作性分析[+]$矿山机械,"**&(",):,".,,$[%]方旭东$液压挖掘机中负荷传感系统的分析与计算[+]$同济大学学报:自然科学版,,--",,*(*):"-*&.""--$[&]N 62C O >)=?$’9:<D >=?)=:<P K <B >G <=F )D <I )D C )F >9=9H )D 9):Q ;<=;>=?)=:K B <;;C B <E 9G K <=;)F <:@A :B )C D >E ;A;F <G [2]$[;$D $]:1);R )F E @<S )=6=>I <B ;>F A,!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"""",--!$下期文章摘要预报逆向工程中密集数据采样以及网格化技术何炳蔚以激光.机器视觉测量方式得到的曲面数据云为基础,探讨了基于给定精度的曲面密集散乱数据点群的数据压缩以及几何建模方法$其中根据激光测量方式和三维点群分布的特点,提出一种在给定采样精度基于曲率的曲面自适应采样的方法;通过激光扫描曲线间的采样点匹配为进一步数据压缩提供依据;并由度量曲面的初步网格点阵对测量点逼近程度好坏来进一步完成对曲面模型的修正$通过实例验证了这种方法的可行性$履带式工程车训练模拟器作业手柄的设计与实现张琦,周祖安,孙邵文履带式工程车训练模拟器是一种集模拟驾驶训练、推土作业训练、驾驶考核于一体的多功能训练模拟系统$介绍了基于’1(#!-单片机和开关式功率放大集成电路7!*%%10M 芯片设计的该型模拟器推土作业手柄的原理、硬件组成和软件设计,成功实现控制铲刀提升、下降和操纵力反馈功能$",!第!期郝鹏,等:负载敏感系统测试及特性分析。
负载敏感多路阀工作原理负载敏感多路阀(Load Sensitive Multiport Valve)是一种可以根据负载变化自动调节流量的阀门。
它在液压系统中具有重要作用,可以有效地平衡流体的压力,降低系统的能量消耗,提高系统的响应速度和稳定性。
负载敏感多路阀由阀体、阀芯、弹簧、调节阀、负载敏感元件等组成。
当液压系统中有负载变化时,负载敏感元件会感知负载的变化,并通过调节阀控制阀芯的移动,进而改变液压系统的流量。
具体工作原理如下:当液压系统中没有负载作用时,阀芯处于初始位置,流体通过阀体的中心通道直接流过,不受阀芯控制,流量较大。
同时,弹簧的压力将阀芯保持在初始位置。
当液压系统中有负载作用时,负载敏感元件会感知到负载的变化。
如果负载增加,负载敏感元件会发出信号,通过调节阀补充液压系统中的压力。
增加液压系统中的压力可以推动阀芯的运动。
阀芯的运动会改变阀体中通道的截面积,从而改变液体的流量。
负载敏感多路阀会根据负载的变化,自动调整阀芯的位置,控制液体的流量。
当液压系统中的负载减少时,负载敏感元件会感知到负载的变化,并通过调节阀降低液压系统中的压力。
降低压力可以使阀芯回到初始位置,恢复到较大的流量状态。
通过以上工作原理,负载敏感多路阀可以根据负载的变化自动调节流量,从而使液压系统能够更好地适应实际的工作状态。
它可以实时监测负载的变化,并迅速响应,及时调整流量,平衡系统的压力,提高系统的工作效率和稳定性。
负载敏感多路阀在液压系统中的应用非常广泛。
例如,在挖掘机、起重机、农机等大型设备中,负载敏感多路阀可以根据负载变化,精确控制液压系统的流量,从而实现平稳的工作,减少能量消耗,延长设备的使用寿命。
负载敏感多路阀的工作原理简单而可靠,它通过监测负载的变化,自动调节流量,提高了液压系统的工作效率和稳定性。
同时,它还可以降低系统的能源消耗,节约成本。
因此,负载敏感多路阀在液压系统中具有重要作用,为现代工程机械的发展提供了有力的支撑。
《装备维修技术》2021年第6期—387—挖掘机负载敏感主阀整机调试问题解决刘美英 肖 刚 聂文磊(江苏汇智高端工程机械创新中心有限公司,江苏 徐州 221004)引言我国现在还属于发展中国家,建设现代化强国是我国一成不变的宗旨,发展综合国力当然少不了工程建设,而建设工程上最常见的重型机械就是挖掘机。
负载敏感控制技术应用在挖掘机上,不但增强了挖掘机的操作性能,也提高了工作效率。
负载敏感控制系统可以同时控制多个液压系统工作,很大程度上简化了操作系统的回路,使得操作更加精准稳固,且大大降低了油耗和成本。
1、挖掘机负载敏感控制的原理负载敏感控制技术通过引入负载压力信号,反馈至液压系统,实现主泵的输出流量控制,在液压系统中增加压力补偿阀,使液压系统流向执行元件的流量与其负载无关,只与主阀控制阀芯的开度有关。
根据补偿阀与主阀控制阀芯的位置不同,可以将负载敏感系统分为阀前补偿负载敏感系统和阀后补偿负载敏感系统,本文所研究的是阀后补偿负载敏感系统的挖掘机主阀。
根据流量公式可知,通过控制阀节流口的流量与节流口的面积和节流口前后压差有关,如果控制阀节流口前后的压差为常数,则流经节流口的流量只与阀口开度有关。
在负载敏感系统中,两个工作联的控制阀芯同时开启时,压力补偿阀可以保证两个控制阀阀芯节流口前后的压差相等,实际工作时,压力补偿阀可以用来对负载压力低的工作联实现补偿功能,保持主控制阀芯两端压差恒定,从而系统能实现流量分配与负载无关,只与控制阀阀口的开度有关。
实际上,若要压力补偿阀实现以上所说的补偿功能,即补偿阀可以实现系统阀流量分配只与控制阀节流口的开度有关的前提条件是,系统流量处于非饱和状态,即各元件所需的流量之和小于主泵的供油流量。
当主泵的供油流量小于系统中各元件所需的流量之和时,主泵本身的输出压力降低,对于负载大的主阀所对应的压力补偿器全开,从而失去补偿功能。
如何使负载敏感液压系统在流量饱和状态下,依然能够实现系统对各工作联的流量分配与负载无关,而只与控制阀芯节流口的开度有关,即如何实现系统的流量抗饱和性,是一个需要解决的重要问题。
负载敏感系统测试及特性分析
郝鹏;何清华;张大庆
【期刊名称】《中国工程机械学报》
【年(卷),期】2006(004)003
【摘要】负载敏感系统是液压系统节能控制的主要环节之一.对一具有负载敏感系统的挖掘机在不同工况、不同负载压差,以及不同操作动作下泵的出口压力、流量进行了测试,分析了负载敏感系统工作特性,提出了压差的设定值应随负载的大小按正比例调节,以提高系统对负载的跟随性并减少波动.在标准负载工况下,压差设定为1.7 MPa 时,系统工作比较理想.
【总页数】5页(P317-321)
【作者】郝鹏;何清华;张大庆
【作者单位】中南大学,机电工程学院,湖南,长沙,410083;中南大学,机电工程学院,湖南,长沙,410083;中南大学,机电工程学院,湖南,长沙,410083
【正文语种】中文
【中图分类】TH13
【相关文献】
1.蓖麻收获机负载敏感驱动系统动态特性分析及优化 [J], 赵华洋;吴晓强
2.定量泵负载敏感系统中三通流量阀的阻尼特性分析 [J], 罗艳蕾;张明磊;徐乔
3.挖掘机阀前补偿负载敏感系统特性分析 [J], 胡鑫乐
4.负载敏感多路阀LS卸荷油路特性分析 [J], 刘伟
5.一种大流量小压差高效负载敏感多路阀特性分析与研究 [J], 杨飞;刘彬;王晓虎;徐翊杰;谢欣武
因版权原因,仅展示原文概要,查看原文内容请购买。

![二、开式中心负荷传感系统的组成_小松挖掘机结构与维修_[共3页]](https://uimg.taocdn.com/605aea3c6294dd88d1d26b65.webp)
第三章 小松PC200-8、PC200LC-8、 PC220-8、PC220LC-8型挖掘机液压系统第一节 液压系统概述PC200-8型挖掘机的液压系统为开式中心负荷传感系统(OLSS系统),该系统是通过控制斜盘式轴向变量柱塞泵旋转斜盘角度(输出流量)的方法,来减少燃油消耗的节能系统。
挖掘机作业时,由于该系统的作用,可减少液压损失,以增强微调控制并且控制油泵的供油量。
PC200-8型挖掘机的液压原理图如图3-1所示。
一、开式中心负荷传感系统的特点①定扭矩控制。
维持液压泵驱动扭矩不变。
若液压泵负载(泵压力)上升,则液压泵输出流量减小;若液压泵负载(泵压力)下降,则液压泵输出流量增加。
该功能由扭变控制阀(TVC阀)控制。
②截断控制。
截断控制目的是减少作业时的溢流损失。
若负载逐渐增加,液压泵输出压力也随之增加,当压力接近溢流压力时,液压泵的排油量减少。
该功能由截断阀(CO阀)控制。
③油量控制。
操纵杆在中位时,液压泵的输出油量减少。
当精细控制时,按照操纵杆的行程,液压泵供给相适应的所需油量。
这就减少了空挡或微调控制时的油量浪费,从而减少功率损失。
该功能由反向控制阀(NC阀)和射流传感器(在操纵阀内)控制。
二、开式中心负荷传感系统的组成①开式中心负荷传感系统由液压泵系、操纵阀、工作装置用油缸和挖掘机行走、回转用液压马达等执行元件组成。
开式中心负荷传感系统如图3-2所示。
②液压泵系统由两个斜盘式轴向变量柱塞泵(前、后)、先导泵、扭变控制阀、截断阀、反向控制阀、伺服阀等组成,其结构如图3-3所示。
− 112 −。
LUDV-Steuerungskonzept - Version 4e 05.06.19 Seite 1 三位六通换向控制阀块 (open center) 液压控制技术 在液压控制技术起初,加工机械厂的加工运动的速度取决于控制阀的横截面及液压流体
的粘度。 对于速度的灵敏控制只能通过严格操纵才能实现。 接着,根据3位6通换向阀的原理对第一个控制阀块做一个重大改进,就使得一个机床工人同时相应地控制几个加工运动成为可能。
下面用M1控制阀块的例子来图解这个工作原理 M1单阀块截面图 LUDV-Steuerungskonzept - Version 4e
05.06.19 Seite 2 在阀杆中位,油液通过铸造的通道无压的从P口流到T口(中位循环),泵和执行机构工作油路的接口A和B连接切断。可利用机械式的手柄或依靠液压方式在a1或b1口引入先导压力,使阀杆离开中位而移动。 依靠阀杆的换向和对阀杆的控制,减少P口到T口连接的通道,随着其进一步位移,进一步减少流通面积,使流阻增大(流通面积的缩减导致流阻的增加),以至于压力因此增加。随着从P口到T口的流通面积减少,P口到A口或P口到B口的连接通道将打开,液体将流到执行器接口。当由于压力和液压缸面积产生的力超过作用在液压缸上的负载外力时,油缸开始移动。P→A(或P→B)的流通面积直接决定了流量,从而也决定了液压缸或液压马达的速度。安全阀限制系统最高压力,活塞上单向阀能防止阀杆在中位时油缸下降。 以上所述的工作原理同样适用于几个阀杆,根据液压泵提供有效流量,所有操作能从停止到最大速度相应并行地受到控制。 三位六通换向阀的控制原理,也称作“节流控制”,它在元件布置方面是简单的,操作可靠,经济划算,系统可使用定量或变量泵。缺点是节流调速时,有部分多余的压力油直接回油箱,造成功率损失。 而且,其控制特点是与压力相关的,在并联油路几个执行机构同时动作时,可能彼此互相影响。 这就是开发与负载压力无关的负载传感系统的决定性原因。 负载传感系统 同样就负载传感系统而言,执行机构的速度是由控制块内主阀芯的位置决定的。打开的通量截面较大也就意味着速度较高。最基本的差异是用负载传感, 流量是可控的。 泵只需要提供当前所需的流量,其功能是通过把从液压控制系统的压力反馈到泵上来实现的。 该泵设计成控制器在系统内能以恒定的标准值来保持一定的压力差,以输出所需的流量。
Steuer- block
ReglLUDV-Steuerungskonzept - Version 4e 05.06.19 Seite 3 负载传感控制阀0块设计为每个阀杆上都带有一个额外的流量控制部件。压力补偿阀使流量控制阀在负载压力不同的情况下,也能给执行机构以恒定的流量。 压力补偿阀用一个给定的压力差作为检测变量,主阀芯的压力上下波动被检测,并且控制压力补偿阀的阀杆。
所述的这种形式的负载传感控制操作非常可靠和精确,操作人员可以获得一致的控制特性。 给机器的指令控制信号由液压或电子的控制装置动作产生,并立即响应。 由于压力不同或粘度造成的影响能很大程度上得到补偿。 然而,如果几个执行机构同时需求的流量比泵能输出的最大流量高时,系统的性能可能就会受到限制。因压力控制所需的压力差不能再被建立起来,即使用最高压力供给单独的执行机构也无法满足时,这就可能导致这些功能的停止。
Main spool Pressure compensator LS control block M4-15 LUDV-Steuerungskonzept - Version 4e
05.06.19 Seite 4 LUDV 控制 LUDV 代表与负载压力无关的流量分配器,系统是一个特殊形式的负荷传感控制系统。 为了消除供给不足这一缺点,根据LUDV原理,控制块要有一个不同的设计形式。 当用在LS控制块情况下时,压力补偿阀不是安置在泵和主阀杆之间,而是安置在主阀杆和执行端口之间。
所有相关的压力补偿阀都互相连接而且用相同的压力差操纵,其中最高的负载压力适用于所有压力补偿器。 当LUDV系统部协调,即按要求的速度操作所有执行机构所需流量大于泵的最大流量时,其通过所有压力补偿阀产生的压力差来实现,所有动作功能的速度均匀地减小能。 并能防止液压执行机构产生停滞。
Druckwaage LUDV 控制模块 M7-22 LUDV-Steuerungskonzept - Version 4e
05.06.19 Seite 5 LUDV 功能 中位
(1) 行程限制块 (2)二次压力释放/防蚀阀 (3) 负载保持阀 (4) LUDV 压力补偿阀 (5) 先导梭阀 (6) 控制阀杆 (7) 输入测流口 p A (8) 输入测流口p B (9) 输出测流口 B T (10) 输出测流口 A T (11) 通道 pc A (12) 通道 pc B (13) 压力补偿控制阀杆 (14) 压缩弹簧
在控制阀中位时(a、b口无先导压力),从泵到P’通道的连接被阀芯封闭,负载保持单向阀和压力补偿阀关闭。在这个位置,P’通道内和负载保持阀下游的压力通过阀芯的间隙减少到回油箱压力。 由于控制阀芯的重叠,密封长度使执行机构接口在壳体中封闭,执行机构因此保持在这个位置。 这个LUDV部件压力补偿阀安排在控制阀芯测流口的下游,它包含有一个控制阀芯(13)和一个能限定稳固初始位置的微压缩弹簧(14)。
PSt aPTT
LSAB(1)(2)
(3)(14)(4)(13)
TPSt b(6)(11)(10)(8)(12)(9)(5)(7)LUDV-Steuerungskonzept - Version 4e
05.06.19 Seite 6 独立操纵或最高负载执行机构
先导控制装置的先导压力使得控制阀芯(6)克服弹簧力相应按比例的移动。这个图中,A口的先导压力推着阀芯克服B侧控制盖内的弹簧力向右移动。控制阀芯的测流输入节流口(7)打开了从泵来的P口与P‘通道的连接。该压力使得压力补偿阀(13)打开并且被施加到单向阀(3)上。 执行机构A口压力Pc通过控制阀芯的(11)通道使左边的单向阀(3)关闭。当P‘压力升至高于Pc时,单向阀打开,泵和执行机构之间的通道打开,执行机构开始动作。执行机构内排出的油从B口通过输出测流节流口(9)流回到油箱,只要执行机构口的压力低于设定压力,二次压力安全阀(2)保持关闭。在外负荷作用力造成的执行机构气穴现象的情况下,与A口连接的过载阀(压力释放/防气蚀阀)的补油锥阀芯打开,进行补油,防止吸空。 在单独动作情况下或当执行机构的负载压力Pc在系统中处于最高,通过来自P‘通道的压力补偿阀的内孔产生负载传感(LS)压力,并且反馈到泵控制器和带有较低负载压力的压力补偿阀部件。 从负载保持阀上游,P‘通道提供的LS信号,确保达到需要的工作压力,执行机构端口才打开,这可以防止由于LS供给从执行机构油路中分流油液而导致执行机构短暂下降。 压力补偿阀完全打开后, P‘通道与执行机构Pc接口连接而没有压降。
PSt aPTT
LSAB
PSt b打开与LS信号的连接 压力补偿阀完全打开
2 3 11 P’ 7 6 9 2 LUDV-Steuerungskonzept - Version 4e
05.06.19 Seite 7 同步动作 饱和系统
在饱和系统的操作中,经由测流节流口需求的流量小于或等于泵的流量 Q 执行机构 Maximum Q 泵 (功率控制范围内) p节流口 基本上与泵的流量控制器上设定的 pLS控制器 相一致,两个值得差异是由于从泵到测流口的补油路上的损失造成的。
带有更高负载压力执行机构的同步动作
典型的例子就是动臂的提升和铲斗的同步动作,动臂回路中更高的负载压力使得铲斗部分的压力补偿阀中的节流口通流面积减少,在这种控制状态下,压力补偿阀的控制端产生一个从P‘通道到执行机构端口Pc的压降,通过测流节流口 (7)的p是相同的。因此,执行机构的速度与负载压力的差别无关。
PSt aPTT
LSAB
PSt bLS信号关闭 压力补偿阀起作用 LUDV-Steuerungskonzept - Version 4e
05.06.19 Seite 8 非饱和状态
当系统是非饱和状态时,由打开着的测流节流孔通流面积总和决定的油量将超过泵的最大流量,压力控制器不再能通过进一步转动泵的变量调节器来提供先前的系统压力,当泵已经提供根据泵特性曲线设定的最大流量时,泵的压力就减小。 在非饱和状态下,泵的排量只由功率控制器决定。 Q执行机构 > Maximum Q泵 当系统是非饱和状态时,负载压力最高的执行机构的压力补偿阀完全打开,并且LS压力 = p’,因此系统/泵的压力、 p测流节流口和流量也随着非饱和状态程度的增加而下降。 在LUDV系统中,所有执行机构部分的p测流节流口总相同。但不是一个恒定值。根据非饱和状态的程度,它可能在设定值pLS控制器 和大约2 bar的压力之间变化(见表:p依赖需求的流量),在这个范围内,LUDV系统按比例相应地分配流量。 由于这个原因,即使在非饱和状态下,LUDV系统内负载压力最高的执行机构也将不会陷入停顿状态,所有使用中的执行机构的速度根据开启的通流面积按比例减小。
说明:不同负载压力情况下的压力补偿阀的功能 如果在非饱和状态范围内的同步动作中,执行机构的速度减小,也就是测流节流口关闭,非饱和程度减少,如果其它的仍还起作用的部件的p测流节流口增加,执行机构动作速度的也就相应增加。 www.rexroth.com
Lastdruck niedrigLow Pressure postionLastdruck hochHigh Pressure Position
pcHigh = LS-System = p'
LS = pc
High
pcHigh = LS-System = p'
pc
High
pc
High
p' = LS = pc
High
p = p
pcLowpc
Lowp'
p
p'
(1)(2)p'p
p'