舵机测试系统上力矩测量的校准方法研究
- 格式:pdf
- 大小:365.98 KB
- 文档页数:4
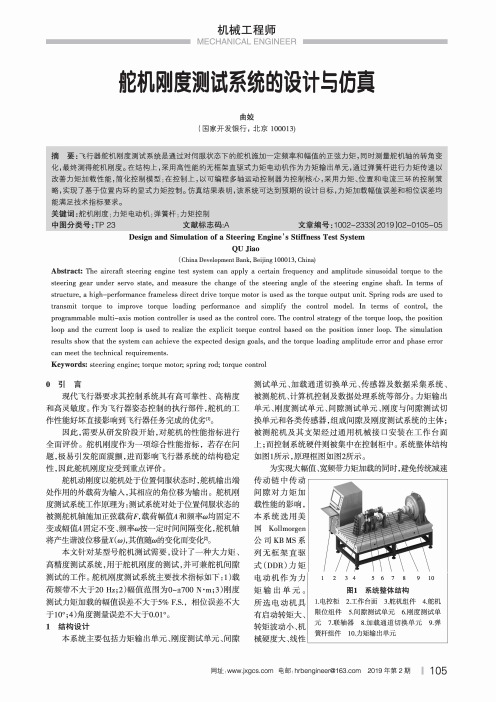
舵机刚度测试系统的设计与仿真曲姣(国家开发银行,北京100013)摘要:飞行器舵机刚度测试系统是通过对伺服状态下的舵机施加一定频率和幅值的正弦力矩,同时测量舵机轴的转角变 化,最终测得舵机刚度。
在结构上,采用高性能的无框架直驱式力矩电动机作为力矩输出单元,通过弹簧杆进行力矩传递以 改善力矩加载性能,简化控制模型;在控制上,以可编程多轴运动控制器为控制核心,采用力矩、位置和电流三环的控制策 略,实现了基于位置内环的显式力矩控制。
仿真结果表明,该系统可达到预期的设计目标,力矩加载幅值误差和相位误差均 能满足技术指标要求。
关键词:蛇机刚度;力矩电动机;弹簧杆;力矩控制中图分类号:TP 23 文献标志码:A文章编号:1002-2333(2019)02-0105-05 Design and Simulation of a Steering Engine^s Stiffness Test SystemQU Jiao(China Development Bank, Beijing 100013, China)Abstract:The aircraft steering engine test system can apply a certain frequency and amplitude sinusoidal torque to the steering gear under servo state,and measure the change of the steering angle of the steering engine shaft.In terms of structure,a high-performance frameless direct drive torque m otor is used as the torque output unit.Spring rods are used to transmit torque to improve torque loading performance and simplify the control model.In terms of control,the programmable multi-axis motion controller is used as the control core.The control strategy of the torque loop,the position loop and the current loop is used to realize the explicit torque control based on the position inner loop.The simulation results show that the system can achieve the expected design goals,and the torque loading amplitude error and phase error can meet the technical requirements.Keywords:steering engine;torque m otor;spring rod;torque control0引言现代飞行器要求其控制系统具有高可靠性、高精度 和髙灵敏度。


舵机测试用弹簧钢板扭矩梯度参数校准装置设计
金冉;朱永晓;丁丹丹;张旺
【期刊名称】《电子测试》
【年(卷),期】2018(0)12
【摘要】针对目前舵机测试用弹簧钢板静态测试装置的不足,设计一种可进行动态激励的弹簧钢板扭矩梯度参数校准装置,并提出相应的测试方法.通过控制激励源的力矩输出和对弹簧钢板的角度、扭矩信号进行采集,结合最小二乘、频响函数估计等数据处理方法,实现对弹簧钢板静态扭矩梯度、阶跃扭矩梯度和正弦扭矩梯度特性的准确分析.
【总页数】3页(P53-55)
【作者】金冉;朱永晓;丁丹丹;张旺
【作者单位】贵州航天计量测试技术研究所,贵州贵阳,550009;贵州航天计量测试技术研究所,贵州贵阳,550009;贵州航天计量测试技术研究所,贵州贵阳,550009;贵州航天计量测试技术研究所,贵州贵阳,550009
【正文语种】中文
【相关文献】
1.三轮摩托车钢板弹簧参数的设计与选择 [J], 常留学
2.一种弹簧钢板式舵机负载模拟系统结构设计 [J], 周蓓;黄玉平;蔡昱
3.农用运输车钢板弹簧选型与计算机辅助参数设计 [J], 江浩斌;周孔亢
4.基于Qt GUI多片等厚叠加钢板弹簧关键参数设计及仿真分析软件开发 [J], 梁
宇通;张云山;周长城;李雪;于曰伟
5.任意分布参数的钢板弹簧的可靠性优化设计 [J], 张义民;贺向东;刘巧伶;闻邦椿因版权原因,仅展示原文概要,查看原文内容请购买。

提高舵机力矩的设计研究
陈捷俊
【期刊名称】《航空兵器》
【年(卷),期】1996(000)001
【摘要】本文分折了提高舵机力矩的意义,提出并实现了在原型舵机的基础上优化结构,提高舵机力矩的设计理论和方法。
【总页数】8页(P13-20)
【作者】陈捷俊
【作者单位】航空工业总公司第○一四中心洛阳;471009
【正文语种】中文
【中图分类】TJ760
【相关文献】
1.电动舵机力矩特性的简易测量研究 [J], 崔业兵;鞠玉涛;郑健;许敬;潘强
2.永磁电机的力矩波动对舵机修正精度的影响 [J], 张福新;王海;张嘉易;张健;李新福
3.反操纵负载力矩对电动舵机性能的影响分析 [J], 郭栋;李朝富
4.基于数字滤波技术的舵机摩擦力矩在线检测 [J], 刘超;何平;王猛;赵志强
5.飞机舵机电动加载系统多余力矩抑制方法 [J], 刘晓琳;李卓
因版权原因,仅展示原文概要,查看原文内容请购买。

舵机测试实验报告舵机测试实验报告张冲一、实验目的为了较好的设计旋翼无人机的舵机控制系统,必须首先确定舵机的旋转精度,舵机精度的高低直接影响控制的精度。
如果舵机的精度达到1°,那么我们现有的控制方式将能很好的实现舵机的控制,从而保证旋翼无人机控制系统的精度。
如果达不到1°,那么我们需要根据舵机的实际精度来改进控制方式,使其尽可能的满足旋翼无人机的控制要求。
所以我们设计了这个舵机测试实验来验证S3156型舵机精度能否达到1°。
二、实验原理如图1,舵机的控制信号是脉冲宽度调制(Pulse Wide Modulator,PWM)信号,利用占空比的变化改变舵机的位置。
图1 PWM控制信号(左图) 实测得PWM信号(右图) 受到舵机测试仪给出的PWM控制信号之后,与舵机相连的指针将发生偏转,偏转变化量将通过转台刻度读出。
如果舵机输出位置精度达到1 ,则满足设计要求。
图2舵机精度测试平台1、把舵机固定在转台中央,使得舵机的转子与转台的圆心重合。
2、把舵机输入端连接到舵机测试仪的输出端,把舵机测试仪接上电源3、把测试仪的输出端连上示波器,系统连接完成如下图3。
4、打开示波器电源,手动微调一下舵机测试仪,使其偏转角度尽可能的小,用游标转盘精确的量出偏转的角度并记录下来;从示波器上读出PWM 波的周期以及高电平部分持续时间,并记录下来。
先从0°一直测到30°,然后再从0°测到-30°。
图3 系统连线实拍图四、实验器材示波器,S3156高精度舵机,舵机测试仪,转台,电源,导线。
舵机具体的选择标准如下:1、质量在10g 以内的微型数字舵机,尽量减少RUA V 总重2、速度0.160s (即舵机偏转60需要0.1s )左右 3、输出力矩0.23Servo M kg cm >?其中,PWM 波周期是恒值ms .516T =,电源输出电压V 5U =。
伺服舵机测试方法一、 目的:本测试方法说明有关舵机的测试, 记录和判定方法二、 堵转扭力测试测试设备:舵机控制器舵机固定夹具扭力计电流表操作方法 :1舵机供电电压设定 4.8V2舵机的旋转输出轴固定在扭力计的轴心3舵机控制器脉冲宽度制调节在 1.5ms, 接上舵机, 使舵机静止在舵机的中央位置4用舵机固定夹具紧夹舵机, 注意不能让舵机转轴受力5使舵机控制器的脉宽输出变成 2ms, 记录扭力计上显示的"正向堵转扭力" 和电源输出的电流6使舵机控制器的脉宽输出变回 1.50ms, 确定扭力计上显示为零, 表示舵机没有受力7使舵机控制器的脉宽输出变成 0.8ms, 记录扭力计上显示的"负向堵转扭力" 和电源输出的电流8舵机供电电压设定 6.0V, 重覆步骤 3 到 7三、 角度测试测试设备:舵机控制器角度测试架操作方法 :1舵机供电电压设定 4.8V2舵机控制器脉冲宽度制调节在 1.5ms, 接上舵机, 使舵机静止在舵机的中央位置3舵机固定在角度测试架上, 指针较准在 90度4量度舵机在舵机控制器的脉宽输出在 0.8, 1.0, 1.5, 2.0 和 2.2ms时的角度脉宽0.8 1.0 1.5 2.0 2.2角度25 ± 345 ± 390± 1135 ± 3150 ± 35舵机供电电压设定 6.0V, 重覆步骤 2 到 4四、 速度测试测试设备:舵机控制器速度测试架操作方法 :1舵机供电电压设定 4.8V2舵机控制器脉冲宽度制调节在 1.5ms, 接上舵机, 使舵机静止在舵机的中央位置3舵机固定在角度测试架上, 指针较准在 90度4使舵机控制器的脉宽输出变成 2ms, 记录正向60度角摆幅的时间 (正向1)5使舵机控制器的脉宽输出变回 1.50ms, 记录反向60度角摆幅的时间 (反向1)6使舵机控制器的脉宽输出变成 0.8ms, 记录反向60度角摆幅的时间 (反向2)7使舵机控制器的脉宽输出变回 1.50ms, 记录正向60度角摆幅的时间 (正向2)8舵机供电电压设定 6.0V, 重覆步骤 2 到 7五、 测试结果测试结果可自己一个表格记录以上数据。
船舶舵机系统的定位性能试验及精度验证船舶舵机系统是船舶操纵系统的核心组件之一,对船舶的操纵性能和安全性起着重要作用。
定位性能试验及精度验证是评估船舶舵机系统性能的关键步骤,可以通过实验方法来验证系统的准确性和稳定性。
首先,在进行定位性能试验前,我们需要了解船舶舵机系统的组成结构。
船舶舵机系统主要由舵机、控制器和传感器组成。
舵机是负责舵角的变化,控制器负责接收操纵指令并控制舵机运动,而传感器用于监测和反馈舵机的位置信息。
定位性能试验的目的是验证舵机系统在接收指令后,实际舵角的变化与预期舵角的变化之间的一致性。
为了进行定位性能试验及精度验证,我们可以采用以下步骤:1. 设计实验方案:根据船舶舵机系统的要求和实际应用场景,设计试验方案。
确定需要测试的舵角范围、测试方法、采样频率等。
2. 搭建实验平台:根据试验方案,搭建舵机系统的测试平台。
确保船舶模型的稳定性和可控性,以保证实验数据的准确性。
3. 获取数据:根据试验方案,使用合适的仪器和设备采集数据。
可以利用传感器获取舵机的位置信息,并将数据记录下来。
4. 数据分析:通过对采集的数据进行分析,比较实际舵角与期望舵角之间的差异。
可以使用统计学方法进行数据处理和评估,如计算平均偏差、标准差等。
5. 确定精度验证指标:根据船舶舵机系统的要求和应用场景,确定精度验证的指标。
这可以包括舵角误差、响应时间、稳定性等。
6. 评估结果:通过与精度验证指标进行比较,评估船舶舵机系统的定位性能。
如果系统的性能满足要求,则可以通过验证。
除了以上步骤,还可以提出一些注意事项来确保试验的准确性和可靠性:1. 试验环境:尽可能在实际航行条件下进行试验,考虑到风浪、浪涌等因素对舵角稳定性的影响。
2. 重复性试验:进行多次试验,以验证结果的可重复性和一致性。
可以计算重复试验之间的偏差,并评估试验结果的稳定性。
3. 数据处理:对采集到的数据进行有效处理,去除异常值和噪声,以确保分析的准确性。