高精度稳定平台伺服系统的自抗扰控制
- 格式:pdf
- 大小:1.16 MB
- 文档页数:5
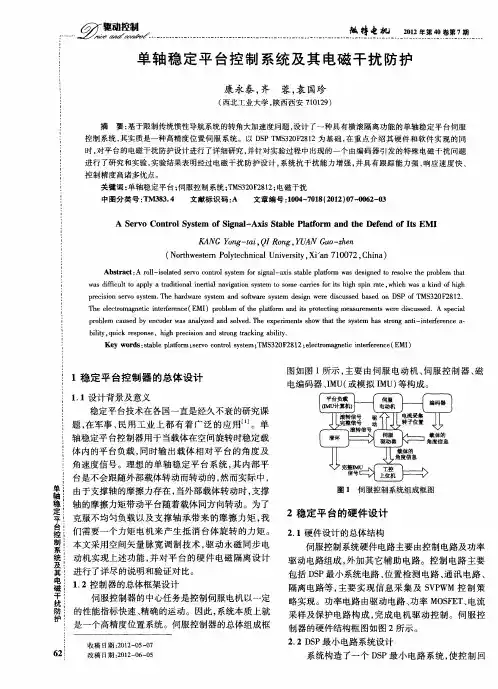
电气传动2023年第53卷第12期ELECTRIC DRIVE 2023Vol.53No.12摘要:制导火箭弹中,常采用永磁同步电动机(PMSM )直驱稳定平台的控制方式实现稳定平台的解旋控制。
自抗扰控制器(ADRC )算法中的扩张状态观测器(ESO )不依赖于控制系统的精确模型,能够实时估计载体转速和一些不确定的扰动。
依据自抗扰控制技术,设计了单轴稳定平台的ADRC ,对控制器优化处理,并进行了Matlab 仿真以及实验验证。
结果表明,该系统具有较强抗干扰能力及较高的控制品质。
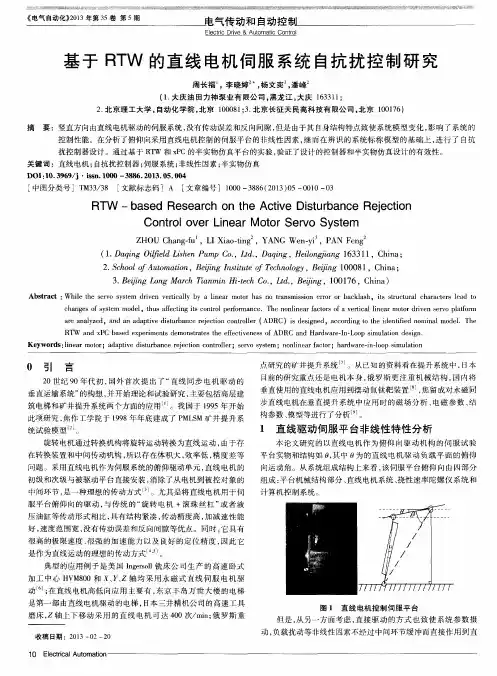
关键词:永磁同步电动机;单轴稳定平台;自抗扰控制器;仿真中图分类号:TP273文献标识码:ADOI :10.19457/j.1001-2095.dqcd25096Design of ADRC Based on Single -axis Stable PlatformLIU Erhao ,WANG Junqing ,QIAO Lili(Xi ’an Shuoyuan Optoelectronic Technology Co.,Ltd.,Xi ’an 710000,Shaanxi ,China )Abstract:Permanent magnet synchronous motor (PMSM )driving stable platform directly is often used in guided rockets to realize the decoupling control of stable platform.Due to the extended state observe (ESO )contained in the active disturbance rejection controller (ADRC ),it can accurately estimate the speed of the rotated carrier and the uncertain disturbances accurately without requiring exact mathematic model of system.Based on active disturbance rejection control technique ,an ADRC for single-axis stable platform was designed ,and optimized the controller.The Matlab simulation and experimental verification show that the system has strong anti-interference ability and high control quality.Key words:permanent magnet synchronous motor (PMSM );single-axis stable platform ;active disturbance rejection controller (ADRC );simulation作者简介:刘二豪(1987—),男,硕士,工程师,研究方向为高精度机电伺服控制;Email :单轴稳定平台的自抗扰控制器设计刘二豪,王俊清,乔丽丽(西安硕源光电科技有限公司,陕西西安710000)稳定平台用于隔离载体扰动,精确保持载体动态姿态基准,使平台稳定在惯性空间,并保证平台的设备能够正常工作。
第12卷第6期中国惯性技术学报 2004年12月文章编号:1005-6734(2004)06-0048-04惯性平台稳定回路的自抗扰控制牛 立1,李 莉2,庄良杰1(1.天津航海仪器研究所,天津 300131;2.天津职业技术师范学院,天津300193)摘要:讨论了惯性平台稳定回路自抗扰控制的设计问题。
平台稳定系统要求响应速度快,抗干扰能力强,稳态精度高等优良特性。
但这些性能指标之间是有矛盾的。
采用经典的控制方法综合设计校正时,往往取折中的方案,很难兼顾所有的性能。
仿真结果表明,用自抗扰控制方法设计控制规律,其稳定回路跟踪能力和抗干扰能力得到了较大的改善,提高了惯性稳定平台的可靠性和精度。
关 键 词:惯导系统;惯性平台;稳定回路;自抗扰控制中图分类号:U666.1 文献标识码:AActive Disturbance Rejection Control of StabilizingCircuits for Inertial PlatformNIU Li1, LI Li2, ZHUANG Liang-jie1(1.Tianjin Navigation Instrument Research Institute, Tianjin 300131, China; 2.Tianjin University of Technologyand Education, Tianjin 300193, China)Abstract: This paper discusses the design problem of active disturbance rejection control (ADRC) for the inertial platform stabilizing circuits. The stabilizing circuits require good characteristics of quick speed, strong anti-jamming and high accuracy. The classical control methods always make compromise with these items. In this paper, the ADRC control rules are designed. The simulations show that the capability of tracking and resisting the disturbance in stabilizing circuits is highly improved by using this method. The reliability and dynamic accuracy of the platform are also improved.Key words: inertial navigation system; inertial platform; stabilizing circuit; active disturbance rejection control1 引 言航海和航空等事业的迅猛发展使惯导系统对稳定回路的要求越来越高,概括起来,希望稳定回路同时具有良好的快速性、无超调、抗干扰能力强等优点[1,2]。

第28卷第2期2021年2月电光与控制Electronics Optics&ControlVol.28No.2Feb.2021引用格式:王春阳,马帅,梁书宁,等•光电稳瞄平台基于自抗扰的改进内模控制[J]•电光与控制,2021,28(2):78-82.WANG C Y,MA S,HANG S N,et al.Improved internal model control of photoelectric stabilized platform based on ADRC[J].Electronics Optics&Control,2021,28(2):78-82.光电稳瞄平台基于自抗扰的改进内模控制王春阳V,马帅1,梁书宁1,王子硕I(1.长春理工大学电子信息工程学院,长春130022;2.西安工业大学兵器科学与技术学院,西安710021)摘要:为了提高光电稳瞄平台的扰动补偿能力,提出了一种基于自抗扰的改进内模控制策略。
以经电流环化简后的方位轴速度环为控制对象,采用内模控制给定系统期望输出轨迹,将基于自抗扰的鲁棒控制律引入到内模控制结构中降低模型误差和外部扰动对系统的影响,提高抗扰动能力。
给出了所提出控制器的设计方法与闭环控制系统结构,仿真对比实验验证了所提策略的高性能表现,结果表明,所提方法对于系统参数摄动具有很强的鲁棒性,与标准内模控制以及PI相比具有更高的稳定精度。
关键词:扰动补偿;内模控制;自抗扰控制;鲁棒性中图分类号:TP273文献标志码:A dot:10.3969/j.issn.1671-637X.2021.02.016Improved Internal Model Control of PhotoelectricStabilized Platform Based on ADRCWANG Chunyang1,2,MA Shuai1,LIANG Shuning1,WANG Zishuo1(1.Department o£Electronic and Information Engineering,Changchun University of Science and Technology,Changchun130022,China; 2.Department of Weapons Science and Technology,Xi'an Technological University,Xi'an710021,China) Abstract:In order to improve the disturbance compensation ability of the photoelectric stabilized platform subjected to uncertainties and disturbances,an improved Internal Model Control(IMC)strategy based on Active Disturbance Rejection Control(ADRC)is proposed.The strategy takes the azimuth axis velocity loop simplified by using the current loop as the control object, and uses the IMC to give the desired trajectory of the system output.By introducing a robust control law based on the ADRC into the IMC scheme,the strategy can reduce the effects of model errors and external disturbances on the system,and enhance the system^ anti-disturbance ability.The design procedures of the proposed controller and the structure of the closed-loop control system are given・The high performance of the proposed strategy is validated by comparative simulations.The simulation results show that the proposed strategy has strong robustness to system parameter perturbation,and has higher stabilization precision compared with that of the standard IMC and PI.Key words:disturbance compensation;internal model control;ADRC;robustness0引言光电稳瞄平台广泛应用于航空航天领域,作用是隔离载体运动干扰以提高光电探测设备的视轴稳定精度,其受到的扰动主要来自建模误差、载体姿态变化、力矩干扰和载体速度干扰等,针对这些扰动,仅通过改进精密机械加工和装配等技术并不能取得期望的效果,还需要采用先进的控制方法来抑制。
基于自抗扰控制器的力矩电机伺服系统控制刘洋(桂林电子科技大学电子工程与自动化学院,广西桂林541004)摘要:自抗扰控制器能将被控对象的内、外“总扰动”进行估计并用前馈补偿的方法将其抵消,适于力矩电机因直接驱动所带来干扰的补偿与控制。
针对测量噪声对线性自抗扰控制器观测器带宽的限制,提出了二阶线性自抗扰的相似结构(SLADRC),并结合三阶积分链式微分器对其效果进行了对比仿真验证。
力矩电机的仿真控制实验表明,与二阶线性自抗扰算法相比,基于相似结构的改进的力矩电机控制,能在有测量噪声情况下兼顾系统跟踪精度、突加负载时抗扰动性与抗噪性。
关键词:力矩电机;线性自抗扰控制器;测量噪声;扩张状态观测器Performance Analysis and Improvement on LADRC inDirect Drive TorqueMotor Servo SystemLIU Yang(School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin541004,China)Abstruct: Active disturbance rejection controller(ADRC) have the ability to estimate “total disturbance” of the plant including the internal and external disturbance,and the estimation can offset the total disturbance through the method of feedforward.ADRC is appropriatefor the anti-disturbance requirement of direct drive torque motor servo system.For the observer bandwidth limit caused by measurement noise,a similar linear auto disturbance rejection controller(SLADRC) is proposed.We carried out some simulation contrasts to verify the the algorithm combined with third-order integral chained differentiator subsequently.Results of control simulation experiment of torque motor show that,compared with Second-order LADRC, the improved control of torque motor based on the similar structure,was able to balance the tracking precision of the system, load disturbance and noise tolerance under the circumstance of measurement noise.Keywords:torque motor;LADRC;measurement noise;ESO1 引言力矩电机具有堵转力矩大、空载转速低、过载能力强的特点,适合应用于直接驱动负载的场合。
高精度伺服转台扰动力矩补偿的一种重复自适应控制方法
张德成;杨松
【期刊名称】《自动化技术与应用》
【年(卷),期】2010(029)010
【摘要】摩擦力矩是高精度伺服转台控制系统中最主要的扰动力矩,也是影响系统低速跟踪性能的最主要因素.针对系统中动态摩擦力矩的影响,并且为了进一步提高系统的位置跟踪性能,本文提出一种重复自适应控制方法,仿真研究验证了所提方法的有效性.
【总页数】5页(P32-36)
【作者】张德成;杨松
【作者单位】哈尔滨工业大学控制与仿真中心,黑龙江,哈尔滨,150001;东北林业大学机电工程学院,黑龙江,哈尔滨,150040
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.精密速率控制系统中位置周期扰动的动态补偿——一种有限维重复控制方法 [J], 张东纯;曾鸣;苏宝库
2.高精确度伺服转台控制系统中的扰动力矩补偿 [J], 杨松;王毅;苏宝库
3.一种基于模糊补偿的自适应控制在液压转台伺服系统中的应用 [J], 李军伟;赵克定
4.一种新的重复自适应摩擦补偿方法及其在高精度伺服系统中的应用 [J], 杨松;曾
鸣;苏宝库
5.一种转台伺服系统干扰补偿控制方法研究 [J], 赵回;王雪梅;许哲;杨柱;吴桐;王健永
因版权原因,仅展示原文概要,查看原文内容请购买。
光电稳定平台神经网络自抗扰控制方法朱启轩;张红刚;高军科【摘要】提出了一种采用BP神经网络对自抗扰控制器中的非线性扩张状态观测器进行参数整定的方法,简化了非线性扩张状态观测器繁琐的参数整定过程,并对这种结合了BP神经网络的自抗扰控制系统进行了仿真分析.仿真结果表明,加入BP神经网络的自抗扰控制系统可以显著地提高机载光电稳定平台的扰动隔离度,控制效果明显比传统自抗扰控制方法好,对提高机载光电稳定平台的视轴稳定精度具有重要意义.%A parameter setting method is proposed for the nonlinear extended state observer in the Active Disturbance-Rejection Controller (ADRC) by using Back-Propagation Neural Network (BPNN).This method simplifies the complicated parameter setting process of the nonlinear extended state observer.Simulation is made to the BPNN based ADRC system.The simulation results show that this method can significantly enhance the disturbance isolation of the airborne optoelectronic stabilized platform,and the control effect is obviously superior to that of the traditional active disturbance-rejection control method,which is of great significance for improving the optical-axis stabilizing accuracy of the airborne optoelectronic stabilized platform.【期刊名称】《电光与控制》【年(卷),期】2018(025)003【总页数】5页(P10-14)【关键词】光电稳定平台;自抗扰控制;扩张状态观测器;BP神经网络;扰动补偿【作者】朱启轩;张红刚;高军科【作者单位】光电控制技术重点实验室,河南洛阳471000;中国航空工业集团公司洛阳电光设备研究所,河南洛阳471000;中国航空工业集团公司洛阳电光设备研究所,河南洛阳471000;中国航空工业集团公司洛阳电光设备研究所,河南洛阳471000【正文语种】中文【中图分类】V248.1;TP2730 引言在飞机飞行过程中,光电稳定平台探测器视轴指向会受到各种扰动的干扰,影响视轴稳定精度,进而影响成像清晰度和信息获取准确性。
基于改进型自抗扰控制器的转台伺服系统高精度控制研究孟一博;刘丙友;王力超【摘要】提出一种改进型自抗扰控制器,给出转台伺服控制系统的传递函数模型,在扩张状态观测器中引入新的非线性函数,用Lyapunov函数证明改进型扩张状态观测器的稳定性,实时观测转台速度的各种扰动.仿真实验表明,该方法可以实现高精度速度跟踪,具有较好的鲁棒性和抗干扰性.【期刊名称】《牡丹江师范学院学报(自然科学版)》【年(卷),期】2019(000)002【总页数】6页(P11-16)【关键词】转台;自抗扰控制;改进型扩张状态观测器【作者】孟一博;刘丙友;王力超【作者单位】安徽工程大学电气工程学院 ,安徽芜湖 241000;安徽工程大学电气工程学院 ,安徽芜湖 241000;安徽工程大学电气工程学院 ,安徽芜湖 241000【正文语种】中文【中图分类】TP27航空和宇航技术的高速发展,对机器的机能及精确度的要求不断提高,转台伺服系统的控制精确度也要提升.抵抗转台中各种非线性因素扰动,提高转台控制精度,是优化转台控制性能的最重要方法之一,国内外学者对此进行了大量研究.陈坤、闵斌、于启洋等提出了一种最优自适应参数估计方法,用于估计转台系统的未知扰动,取得较好的控制精度.[1]Liu B提出了一种高精度迭代滑模控制,用于前馈补偿,减弱了抖动产生的静差问题.[2]王璐、苏剑波将模糊控制与PID控制相结合,提高了系统整体的控制精度和静态性能.[3]吕东阳、王显军将神经网络用于辨识系统模型误差,保证了系统跟踪误差的收敛及稳定. [4]白国振、俞洁皓提出了一种动态滑模控制方法,有效地抑制了力矩干扰.[5]针对转台伺服系统中难以精确建模、易受摩擦和外界不确定干扰影响的问题,利用自抗扰控制器不依赖对象模型参数,可以实时估计和补偿内外扰动的特点.本文建立转台的传递函数模型,对原始ADRC中的扩张状态观测器部分进行改进,通过构造新型的非线性函数,提高扩张状态观测器的性能.仿真实验表明,该方法可以实现高精度的速度跟踪,具有较好的鲁棒性和抗干扰性.1 转台伺服控制系统建模直流力矩电机具有大转矩、低转速、响应速度较快、高精度、力矩系数大等优点,适用于高精度伺服转台系统.直流力矩电机一般没有中心传动结构,直接作用于电动机负载.因为这种电机不具有传动环节,力矩一般都作用于负载上.因此,可以化简转台的数学方程模型为电机的数学方程模型.一般直流力矩电机的动态电压方程为:(1)式(1)中,Ua是输入电压,Ia是电枢电流,Ra是电枢的等效电阻,Ea是力矩电机电枢的反电势,La是电机的电枢电感.电磁转矩和电磁力会在有电流从电枢绕组流动时产生,电磁转矩的方程为:Tem = KiIa.(2)式(2)中,Tem是输出的电磁转矩,Ki是电机转矩的系数.转矩平衡的方程:.(3)式(3)中,J是电机的转动惯量,ω是电机转速,Tc是干扰的力矩,Kc是粘滞阻尼系数,Tf是电机的阻转矩.电枢绕组中的反电动势方程为:Ea=Keω.(4)式(4)中,Ke是反电动势常数.对(1)(2)(3)(4)四个式子分别作拉普拉斯变换,可以得到:Tem(s)=KiIa(s),Ea(s)=Keω(s).(5)整个系统的输入为电枢的电压Ua,系统的输出为角速度ω(s).控制系统的摩擦力矩为Tc(s),在转台伺服系统中,摩擦力矩会直接降低转台控制系统的位置和速度控制的精度.因此,电机的干扰力矩Tc假设为零,由此得到直流力矩电机的传递函数为:(6)式(6)中,τm为机电时间常数,τm=RaJ/KeKi,τe为电磁时间常数,τe=La/Ra.驱动电路是对控制输出信号进行线性放大,因此,其传递函数近似描述为:Gw(s)=Ku .感应同步器可以将模拟信号转换为数字信号,在系统建模的研究中,可视为反馈元件.即:GA(s)=1.(7)所以,可以得到控制系统的传递函数为:(8)2 改进型自抗扰控制器的设计ADRC是一种根据系统的输入和输出信息,可以对系统的未知干扰进行实时补偿和预计的先进控制技术.自抗扰控制器由非线性跟踪微分器(tracking differentiator,TD)、扩张状态观测器(extended state observer,ESO)和非线性误差反馈控制律(nonlinear state error feedback,NLSEF)模块组成.2.1 TD的结构TD由输入的信号和转台的特性来安排过渡过程,输出的信号为输入信号的跟踪信号和其微分信号.TD可以在系统快速特性与超调特性之间取得平衡.TD常用形式为:(9)式(9)中,yd为系统的输入信号,v1为系统输入的跟踪信号,v2为跟踪信号的微分信号.fhan(v1,v2,r,h)为非线性函数,表达式为:(10)其中,r和h分别是速度因子和滤波因子,r取得值越大,跟踪速度会越快,h值越大,滤波效果越好.但是过高的值会导致高频震颤的产生,可以根据实际系统的性能要求选择合适的参数.2.2 NLSEF的结构NLSEF给出被控对象的控制策略,是跟踪微分器(TD)的输出量和扩张状态观测器(ESO)生成的状态变量估计之间误差的非线性组合,NLSEF的表达式为:(11)式(11)中,α1,α2,δ0为函数的非线性因子,β1,β2为函数的增益.选择合适的参数,即可实现良好的非线性控制,且具有优良的鲁棒性和适应性.2.3 改进型扩张状态观测器的结构ESO是在被控对象数学模型难以建立的情况下,将其看为含未知干扰的积分串联环节,对被控对象进行观测,观测得到的被扩张状态用于观测未知扰动,将其反馈作用于干扰实时补偿,其他观测所得状态为输出信号和其各阶微分信号,用于反馈时计算误差的各阶微分状态.一般二阶含干扰被控对象可以扩张成以下状态空间方程:(12)式(12)中,y是输出,b是增益,ω(t)为对象内部外部未知干扰总和.建立一个三阶扩张状态观测器为:.(13)式(13)中,zi为ESO被扩张状态,e1为 ESO对输出信号的跟踪误差,β3,β4,β5为观测器增益.fal(e1)为非线性函数,形式为:函数fal性能具有缺陷,为分段函数,在区间范围内函数整体为连续,但在分段点δ处函数不可导.其在线性区间内具有较好的控制性能,但高速运动时系统需要将参数δ调节较小,此时函数fal的导数会瞬间降低,使系统的输出发生较大幅度的振荡,降低整体系统的鲁棒性.为了解决上述问题,需要将函数fal改造成在整个区域内光滑可导的函数,从而提高扩张状态观测器的性能.当|e|>δ时,新函数nfal(e,α,δ)的表达式依旧是nfal(e,α,δ)=|e|αsign(e).当|e|≤δ时,令nfal(e,α,δ)函数通过插值拟合的形式为:nfal(e,α,δ)=psine+rtane.选用三角函数的插值拟合方式而不选用多项式拟合,是因为函数中的参数δ一般小于1,在这个区间内sine比e呈现出更好的平稳性,而tane比e3呈现出更好的收敛性,可以使函数在原点处光滑并可导.拟合过程需要满足处处可导的要求,则下式成立:.(15)求解得到:(16)那么,函数表达式为:nfal(e,α,δ)=(17)将改造后的nfal函数作用于扩张状态观测器中,可以使其控制性能明显提高. 2.4 改进型扩张状态观测器的稳定性证明如果令e1(t)=z1-x1,e2=z2-x2,e3=z3-x3,同时假定ω(t)=ω0为常数,则改进型扩张状态观测器和系统的误差为:(18)误差方程可以转化成如下形式:(19)其中,显然,且有界.当满足下列条件时:可以得由正数构成主对角线的矩阵D,即为了将DF(e(t))构成正定对称矩.其中λ,φ1,φ2是无穷小的正数,且h(e1(t))=g(e1(t))=假设误差方程的Lyapunov函数为={-[β3e1(τ)-e2(τ)]2-λ[β4nfal(e1,α2,δ)-e3(τ)]2-λ[β5nfal(e1,α3,δ)+ω0]2}dτ+C.其中.t > 0,C为无穷大正数.在误差系统的局部平衡点,V(t)中的第1项的被积函数值有界,因此只需C取足够大的正数,就可以保证V(t) > 0.Lyapunov函数的导数为:λ[β4nfal(e1,α2,δ)-e3(τ)]2-λ[β5nfal(e1,α3,δ)+ω0]2≤0.所以,当且仅当方程取零解时,才会有故整体系统在平衡点附近渐进稳定.根据nfal函数的曲线特性,在e1(t) = 0的临域内,条件可以转化成仿真结果表明,只要ESO的参数满足上述条件,就可以使整个系统渐进稳定.2.5 系统的整体结构ADRC的各个模块按照上述设计方法,组成改进型ADRC,使用转台系统作为被控对象,改进后的系统整体结构图如图1所示.图1 系统整体结构图3 仿真分析仿真转台参数见表1.将参数带入转台传递函数中,可以得到转台传递函数方程为:(21)为满足一直渐进稳定性的条件,参数的选择见表2.在MATLAB中进行仿真实验,结果见图2.输入为1rad的阶跃输入时,两种ADRC的响应曲线如图2所示.从图中可以看出,原始ADRC的超调量为9.762%,调节时间为0.692 7 s;优化ADRC的超调量为0,调节时间为0.258 5 s.可以得出以下结论:优化ADRC比传统ADRC具有更快的调节速度和更小的超调量.表1 转台参数反电动势常数Ke0.082 57转矩常数Ki1.366 N·m/A额定电流Ia3.15 A电阻Ra5.65 Ω电感La17.875 H转子惯量J0.003 5 kg·m2表2 ADRC各模块参数选取ADRC模块符号名称符号参数TD速度因子r10滤波因子h0.02ESO非线性因子α10.5非线性因子α20.25非线性因子α30.125步长宽度δ0.01增益β360增益β4240增益β5889补偿因子b02.485NLSEF增益β15增益β225非线性因子δ01图2 阶跃输入响应曲线输入为5sin(t)的正弦输入时,两种ADRC的响应曲线见图3.从图中可以看出:传统ADRC达到第一个峰值时间为1.723 2 s,优化ADRC达到第一个峰值的时间为1.537 2 s.所以,优化ADRC可以更快地形成正弦稳定输出,也证明了优化ADRC比传统ADRC具有更快的响应速度.图3 正弦输入响应曲线输入幅值为1、周期为1的阶梯信号时,两种ADRC的响应曲线见图4.从图中可以看出:原始ADRC永远比改进型ADRC更慢到达所有稳定点,这充分证明了改进型ADRC比原始型ADRC具有更快的响应速度和更小的超调量.图4 阶梯输入响应曲线输入单位阶跃信号,在2秒时加入幅值为5的扰动,两种ADRC的响应曲线见图5.从图中可以看出:原始型ADRC的瞬间跳变达到160%左右,而改进型ADRC 基本无跳变;原始型ADRC需要两秒左右的时间重新回到稳定状态,而改进型ADRC基本一直处于稳定状态.说明改进型ADRC比原始型ADRC具有更好的抗扰能力.图5 干扰响应曲线4 结论伺服转台的跟踪性能作为雷达天线和望远镜的重要组成部分,对伺服转台的性能提出了很大的挑战.本文介绍了转台伺服系统的建模与控制方法,给出了改进型的控制算法.用Lyapunov函数证明了系统的稳定性.该改进型控制策略弥补了原始控制算法的高频震颤等缺点,对转台的控制性能有了极大的提升.仿真结果也证明了该控制算法对转台跟踪性能的有效性.参考文献【相关文献】[1] 陈坤,闵斌,于启洋,等.转台伺服系统的动态滑模控制研究[J].上海航天,2015,32(5):35-38.[2] Liu B. Speed control for permanent magnet synchronous motor based on an improved extended state observer[J]. Advances in Mechanical Engineering,10,1(2018-1-01), 2018, 10(1):168781401774766.[3] 王璐,苏剑波.基于干扰抑制控制的飞行器姿态跟踪 [J].控制理论与应用,2013,30(12):1609-1616[4] 吕东阳,王显军.基于模糊PID控制的电机转台伺服系统[J].计算机应用,2014(1):166-168.[5] 白国振,俞洁皓.基于神经网络补偿的转台伺服系统控制研究[J].计算机应用研究,2016,33(6):1676-1681.。