GPS接收机基带信号处理与导航解算
- 格式:pdf
- 大小:3.38 MB
- 文档页数:64
如何进行GPS信号接收与处理在当今智能手机普及的背景下,GPS(全球定位系统)已经成为我们日常生活中不可或缺的一部分。
无论是导航到目的地还是追踪健康数据,GPS技术无疑给我们的生活带来了便利。
但是,你是否想过GPS信号是如何接收和处理的呢?本文将深入探讨GPS信号的接收与处理过程,带您一窥其中的奥秘。
首先,让我们从GPS信号的接收开始。
GPS接收器是一种可接受卫星信号并将其转换为有用信息的设备。
它由天线、射频前端和数字处理单元组成。
天线负责接收来自卫星的微弱信号,而射频前端则负责对信号进行放大和过滤。
之后,数字处理单元将接收到的信号进行解码并计算相应的位置信息。
在接收到卫星信号后,GPS接收器需要进行一系列的计算和处理,以确定设备的具体位置。
首先,它需要获取至少3颗卫星的信号来进行定位,这被称为三角定位。
通过比较接收到信号的到达时间和卫星信号发射的时间,GPS接收器可以测量出设备和卫星之间的距离。
通过获取3个卫星的距离信息,可以将设备的位置限定在一个球面上,这被称为“伪球面”。
然而,因为接收到的卫星信号可能会受到干扰或误差的影响,GPS接收器需要进行更进一步的处理来提高位置的准确度。
一种常见的处理方法是使用差分GPS 技术。
差分GPS通过同时接收地面上的参考信号,并将其与卫星信号进行比较来校正误差。
这种方法可以大大提高GPS接收器的准确性,使测量误差降至几米以内。
除了准确性,GPS信号的可用性也是一个重要的考虑因素。
在城市中的高楼大厦、山谷或树木繁茂的区域,GPS信号的接受会受到挑战。
因此,GPS接收器通常会使用一种叫做接收机自适应抗干扰处理的技术,以增强接收到的信号。
这种技术通过过滤掉干扰频率和增大接收机的灵敏度,使用户能够在信号弱的环境中仍然获得准确的定位信息。
另外一个值得关注的方面是GPS接收器的定位速度。
尽管我们通常认为GPS 定位是即时完成的,但事实上,它涉及到复杂的计算和处理过程。
辅助GPS(A-GPS)可以帮助加快定位速度。
卫星导航系统信号处理算法卫星导航系统是一种利用卫星进行定位、导航和测量的技术。
信号处理算法在卫星导航系统中起着关键作用。
本文将介绍卫星导航系统信号处理算法的工作原理、应用和发展趋势。
首先,我们来了解一下卫星导航系统信号处理算法的工作原理。
卫星导航系统发送的信号包含时间、位置和卫星信息等关键数据。
接收机通过接收卫星信号,并使用信号处理算法来解析这些信息,从而确定接收机的位置、速度和时间。
卫星导航系统信号处理算法通常包括信号跟踪、码和载波解调以及位置解算等步骤。
首先,信号跟踪算法用于对接收到的信号进行跟踪,并提取出码和载波信号。
然后,码和载波解调算法将提取出的信号进行解调,得到码相位和载波相位等信息。
最后,位置解算算法利用解调后的信号以及卫星的位置和时间信息来计算接收机的位置。
卫星导航系统信号处理算法的应用非常广泛。
首先,它被广泛应用于民用定位导航系统,如全球定位系统(GPS)、伽利略导航系统和北斗导航系统等。
这些系统在民航、航海、交通、农业等领域发挥着重要作用。
其次,卫星导航系统信号处理算法也应用于军事领域,用于精确定位和导航。
此外,信号处理算法还用于科学研究、天文学观测等领域。
随着卫星导航系统技术的不断发展,卫星导航系统信号处理算法也在不断进步。
一方面,信号处理算法的精度和鲁棒性得到了提升。
通过采用更先进的数学模型和算法,可以减小信号传输中的误差,并提高定位的准确性。
另一方面,信号处理算法的实时性也得到了改善。
随着计算硬件性能的提升,算法的计算速度得到了大幅提高,从而能够实时地处理大量的信号数据。
此外,卫星导航系统信号处理算法还面临着一些挑战和发展趋势。
首先,室内定位和城市峡谷等特殊环境的定位问题仍然存在。
在这些环境下,卫星信号受到遮挡和多路径效应的影响,导致定位的精度下降。
因此,需要进一步研究和改进信号处理算法,以适应这些特殊环境下的定位需求。
其次,卫星导航系统信号处理算法还可以结合其他传感技术,如惯性导航系统和地面传感器等,来提高定位的精度和稳定性。
GNSS接收机原理1. 概述GNSS(全球导航卫星系统)接收机是使用全球卫星导航系统进行定位和导航的设备。
通过接收来自卫星系统的信号,接收机能够计算出接收位置的经度、纬度和海拔等信息。
本文将详细介绍GNSS接收机的原理及其工作方式。
2. GNSS系统概述全球导航卫星系统目前主要包括GPS(美国)、GLONASS(俄罗斯)、Galileo(欧盟)和BeiDou(中国)等系统。
这些系统由一系列卫星组成,它们围绕地球运行,发射导航信号。
GNSS接收机接收这些信号,并通过计算信号的传播时间和几何关系,确定接收机的位置。
3. GNSS接收机的组成GNSS接收机通常由天线、前置放大器、中频处理器、基带处理器和用户接口等组成。
3.1 天线天线用于接收来自卫星的导航信号。
天线的性能对接收机的定位精度有很大影响,因此选择合适的天线非常重要。
3.2 前置放大器前置放大器用于放大天线接收到的微弱信号,以增强信号的强度和抗干扰能力。
3.3 中频处理器中频处理器用于将接收到的高频信号转换为中频信号,以便后续处理。
3.4 基带处理器基带处理器是接收机的核心组件,它用于提取信号的导航信息,并进行信号处理和解算。
3.5 用户接口用户接口用于与接收机进行交互,显示定位信息和设置接收机参数等。
4. GNSS信号接收原理GNSS接收机的信号接收原理基于卫星导航原理和信号处理技术。
当GNSS接收机收到卫星发送的信号时,它会执行以下步骤来获取位置信息:4.1 信号接收接收机的天线接收卫星发送的导航信号。
4.2 信号处理接收机通过将接收到的信号与接收机内部的时钟信号进行比较,计算出接收信号的传输时间差。
4.3 定位解算接收机使用测距原理和多个卫星信号的时间差来计算接收机位置。
通过接收到的卫星信号的传播时间差,接收机可以确定其与每个卫星之间的距离。
4.4 误差校正为了提高位置定位的精度,接收机还需要对信号进行误差校正。
常见的误差包括大气延迟、钟差和多径效应等。
gps接收机原理GPS接收机是一种能够接收并解析全球定位系统(GPS)信号的设备。
它的原理基于卫星导航技术,利用卫星信号来计算接收机的位置。
本文将详细介绍GPS接收机的原理和工作方式。
GPS接收机的原理可以分为信号接收和信号解析两个部分。
首先,接收机通过天线接收来自GPS卫星的信号。
这些信号包含了卫星的位置信息、时间信息和导航数据。
天线将接收到的信号传输给接收机内部的射频前端模块。
射频前端模块负责放大和滤波接收到的信号,以便进一步处理。
接着,信号会经过频率混频器进行频率转换,将高频信号转换为中频信号。
然后,中频信号通过模数转换器转换为数字信号,进入接收机的数字信号处理模块。
在数字信号处理模块中,接收机会根据卫星发射的导航数据来计算接收机的位置。
导航数据包含了卫星的位置、时钟校正和其他辅助信息。
接收机通过解析导航数据,计算卫星和接收机之间的距离差,进而确定接收机的位置。
为了提高定位的精度和可靠性,GPS接收机通常需要同时接收多颗卫星的信号。
接收机会根据接收到的多个卫星信号进行三角定位,通过交叉计算来确定接收机的位置。
同时,接收机还会使用卫星信号的时间信息来校正接收机的时钟误差,以确保定位的准确性。
除了定位功能,GPS接收机还可以提供速度和时间信息。
接收机通过计算接收到的卫星信号的频率差来确定自身的速度。
同时,接收机还可以使用卫星信号的时间信息来同步自身的时钟,提供准确的时间。
GPS接收机利用卫星导航技术实现定位、速度和时间信息的获取。
它通过接收和解析来自GPS卫星的信号,计算接收机与卫星之间的距离差,从而确定自身的位置。
GPS接收机在航海、航空、汽车导航等领域有着广泛的应用。
随着技术的不断发展,GPS接收机的定位精度和功能将会进一步提升。
测绘技术中的导航卫星信号处理方法导航卫星信号处理方法在测绘技术中扮演着至关重要的角色,它们为地理空间数据采集和处理提供了高精度、高效率的解决方案。
本文将探讨几种常见的导航卫星信号处理方法,以及它们在测绘技术中的应用。
一、信号接收与解调信号接收是导航卫星信号处理的第一步。
在测绘技术中,常用的接收设备包括全球定位系统(GPS)接收机和伽利略卫星导航系统接收机。
这些设备通过天线接收来自卫星的信号,并进行解调和解码。
具体而言,接收机首先将接收到的信号从射频(RF)频率转换为中频(IF)频率。
然后,采用数字信号处理技术将中频信号转换为基带信号。
在此过程中,接收机会对信号进行增益控制、滤波和衰减等操作,以提高信号质量和抗干扰能力。
二、信号轨迹重建信号轨迹重建是导航卫星信号处理的核心环节之一。
在接收机解调和解码后,需要通过信号处理方法将接收到的卫星信号转化为三维坐标信息。
最常用的信号轨迹重建方法是距离测量法。
接收机利用飞行时间(即信号传播时间)与电磁波在真空中的传播速度之间的关系,计算接收机与卫星之间的距离。
基于多个卫星的距离测量结果,可以采用三角法或最小二乘法来重建接收机的位置。
除了距离测量法,还有其他信号轨迹重建方法,如相位差测量法和多普勒测量法。
这些方法在特定应用场景下具有独特的优势,可以提供更准确的位置信息。
三、信号质量评估与误差校正在测绘过程中,对导航卫星信号的质量进行评估是必不可少的。
信噪比(SNR)是评估信号质量的主要指标之一。
较高的信噪比表示强信号与背景噪声的比例较高,从而提供更可靠的信号信息。
误差校正是保证测绘精度的关键步骤。
导航卫星信号在传播过程中会受到多种干扰和误差的影响,如大气延迟、多径效应和钟差等。
为了减小这些误差的影响,测绘技术中使用了一系列的校正方法,如差分定位、无人机辅助测绘和卫星导航信号组合等。
差分定位是一种常用的误差校正方法。
它通过同时接收一个参考站和待测站的卫星信号来估计误差,并将这些误差应用于待测站的位置计算中。
卫星导航系统信号处理的基本原理与技术方法研究卫星导航系统信号处理是指通过卫星接收机接收到的导航信号进行处理和解算,获取准确的位置、速度和时间等导航参数。
卫星导航系统主要包括全球定位系统(GPS)、伽利略导航系统(Galileo)和北斗导航系统(Beidou)等,而信号处理是实现这些导航系统正常运行的关键。
卫星导航系统信号处理的基本原理包括信号接收、载波解调、码序跟踪、时间和频率测量、导航参数解算等几个环节。
首先,信号接收是指卫星接收机接收到来自卫星的导航信号,这些信号经过天线接收后,通过前端放大器放大,并通过混频器、低通滤波器等模块进行信号处理,使其适应后续环节的处理。
其次,载波解调是将接收到的信号分离为载波频率和导航信息频率。
在载波解调时,需要利用接收机中的本地振荡器与导航信号的载波频率进行比较,从而获取导航信息的频率进行后续处理。
在完成载波解调后,信号处理则进入码序跟踪阶段。
码序跟踪是指通过跟踪环路跟踪接收到的导航码序列,实现对码信息的保持和跟踪。
在码序跟踪阶段,需要利用相关器对接收到的导航码信号进行相关运算,从而获取最佳跟踪点,以保证接收机对导航码信号的高精度跟踪。
同时,信号处理还需要进行时间和频率测量,以获取准确的时间和频率信息。
在时间测量中,通常采用计数器等设备对导航码序列的周期进行测量,进而求得导航信号的时间信息。
在频率测量中,需要利用频率锁定回路对导航信号的频率进行测量,以得到导航信号的频率信息。
最后一步是导航参数解算。
导航参数解算是通过对接收到的导航信号进行解算和计算,得到定位、速度和时间等导航参数的过程。
在解算过程中,首先需要根据载波相位差、码子时差等信息计算卫星与接收机之间的距离。
然后,通过收集多个卫星的导航信号,利用三角定位原理计算用户位置。
最后,通过对导航码信号进行不同的处理,得到速度和时间等导航参数。
除了以上基本原理,卫星导航系统信号处理还需要应用多种技术方法来提高定位精度和信号强度。
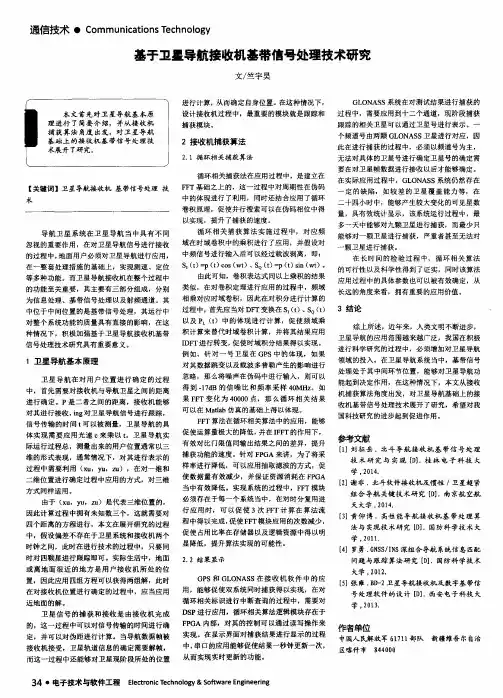
基于卫星导航接收机基带信号处理技术研究本文首先对卫星导航基本原理进行了简要介绍,并从接收机捕获算法角度出发,对卫星导航基础上的接收机基带信号处理技术展开了研究。
【关键词】卫星导航接收机基带信号处理技术导航卫星系统在卫星导航当中具有不同忽视的重要作用,在对卫星导航信号进行接收的过程中,地面用户必须对卫星导航进行应用,在一整套处理措施的基础上,实现测速、定位等多种功能。
而卫星导航接收机在整个过程中的功能至关重要,其主要有三部分组成,分别为信息处理、基带信号处理以及射频通道。
其中位于中间位置的是基带信号处理,其运行中对整个系统功能的质量具有直接的影响,在这种情况下,积极加强基于卫星导航接收机基带信号处理技术研究具有重要意义。
1 卫星导航基本原理卫星导航在对用户位置进行确定的过程中,首先需要对接收机与导航卫星之间的距离进行确定。
P是二者之间的距离,接收机能够对其进行接收,ing对卫星导航信号进行跟踪,信号传输的时间t可以被测量,卫星导航的具体实现需要应用光速c来乘以t。
卫星导航实际运行过程总,测量出来的用户位置通常以三维的形式表现,通常情况下,对其进行表示的过程中需要利用(xu,yu,zu),在对一维和二维位置进行确定过程中应用的方式,对三维方式同样适用。
由于(xu,yu,zu)是代表三维位置的,因此计算过程中拥有未知数三个,这就需要对四个距离的方程进行,本文在展开研究的过程中,假设偏差不存在于卫星系统和接收机两个时钟之间,此时在进行技术的过程中,只要同时对四颗星进行跟踪即可。
实际生活中,地面或离地面很近的地方是用户接收机所处的位置,因此应用四组方程可以获得两组解,此时在对接收机位置进行确定的过程中,应当应用近地面的解。
卫星信号的捕获和接收是由接收机完成的,这一过程中可以对信号传输的时间进行确定,并可以对伪距进行计算。
当导航数据帧被接收机接受,卫星轨道信息的确定需要解帧,而这一过程中还能够对卫星现阶段所处的位置进行计算,从而确定自身位置。
GNSS(全球导航卫星系统)基线解算是通过使用多个接收器接收来自卫星的信号,利用测量数据计算出接收器之间的相对位置。
以下是GNSS基线解算的一般过程:
1. 数据采集:同时在两个或多个接收器上收集GNSS数据。
每个接收器接收来自卫星的信号,并记录下信号到达时间,以及接收器的位置和其他相关信息。
2. 数据预处理:对采集到的GNSS数据进行预处理。
这包括对信号进行时序调整,以校正不同接收器的时钟偏差,并对数据进行质量控制,剔除可能存在的异常数据。
3. 伪距观测值计算:利用接收器记录的信号到达时间和卫星的广播星历信息,计算出每个接收器与每颗卫星之间的伪距观测值。
伪距观测值是从接收器到卫星的距离的近似值。
4. 电离层延迟校正:GNSS信号在穿过电离层时会发生延迟,需要对观测数据进行电离层延迟校正。
这可以通过使用双频接收器并利用L1和L2频率的信号进行差分处理来实现。
5. 基线求解:利用伪距观测值和校正后的数据,使用GNSS 基线解算算法计算出接收器之间的相对位置。
常用的基线解算算法包括最小二乘法(Least Squares)和精确估计法(Precise Point Positioning)等。
6. 结果评估:对基线解算结果进行评估和分析。
可以计算解算出的接收器之间的距离、相对位置的精度和不确定度等指标,以评估解算结果的可靠性和准确性。
需要注意的是,GNSS基线解算的准确性和稳定性受多种因素影响,包括卫星几何分布、接收器的性能和配置、信号遮挡和干扰等。
因此,在进行GNSS基线解算时,需要仔细选择合适的接收器和观测条件,并进行适当的数据处理和质量控制,以获得可靠和准确的结果。
gnss基带算法GNSS基带算法是全球导航卫星系统(GNSS)中的关键技术之一,它在接收机端对接收到的卫星信号进行解调、解调、伪距计算等处理,从而实现定位、导航和时间同步等功能。
本文将从基带算法的基本原理、常见算法以及应用领域等方面进行介绍。
一、基带算法的基本原理GNSS基带算法的基本原理是将接收到的卫星信号进行分析和处理,从中提取出有关卫星位置、接收机位置和时间等信息,以实现定位和导航功能。
基带算法主要包括信号捕获、跟踪和解调、伪距计算等过程。
1. 信号捕获:接收机接收到的卫星信号是非常微弱的,需要通过信号捕获技术将其从背景噪声中提取出来。
信号捕获是通过对接收到的信号进行相关运算,从而得到与接收机位置相关的初始伪码延迟值。
2. 跟踪和解调:在信号捕获之后,接收机需要跟踪和解调接收到的信号。
跟踪是指在接收机端精确跟踪卫星信号的相位和频率,解调是指将接收到的信号解调为基带信号。
跟踪和解调过程是通过对信号进行相位锁定环(PLL)和频率锁定环(FLL)的运算来实现的。
3. 伪距计算:伪距是指接收机与卫星之间的距离,通过测量伪距可以计算出接收机的位置。
伪距计算是基于接收到的卫星信号的传播时间来进行的,通过测量接收机与多颗卫星之间的伪距差异,可以确定接收机的位置。
二、常见的GNSS基带算法1. 码相位测量算法:码相位测量算法是GNSS中常用的基带算法之一,它通过对接收到的信号进行码相位测量,从而得到接收机与卫星之间的伪距差异。
码相位测量算法主要包括码延迟估计、码相位测量和伪距计算等过程。
2. 载波相位测量算法:载波相位测量算法是GNSS中另一种常用的基带算法,它通过对接收到的信号进行载波相位测量,从而得到接收机与卫星之间的相位差。
载波相位测量算法主要包括载波相位锁定和载波相位差计算等过程。
三、GNSS基带算法的应用领域GNSS基带算法在各个领域都有广泛的应用,主要包括以下几个方面:1. 定位和导航:GNSS基带算法可以实现对接收机位置的测量和定位,从而实现导航和导航功能。
gps接收机原理GPS接收机原理GPS(全球定位系统)接收机是一种能够接收并解码卫星信号以确定位置的设备。
它利用卫星发射的信号和三角测量原理来确定接收机所在的位置,从而实现导航和定位功能。
本文将详细介绍GPS接收机的工作原理以及其相关技术细节。
一、卫星信号接收GPS系统由一组运行在地球轨道上的卫星组成,每颗卫星都带有高精度的原子钟。
这些卫星通过无线电波将时间和位置信息广播到地面上的GPS接收机。
GPS接收机接收到卫星发射的信号后,利用内置的天线将信号接收进来。
二、信号处理接收到的GPS信号经过天线传输到接收机的射频模块,射频模块将高频信号转换为中频信号。
接着,中频信号进入基带模块进行信号处理。
基带模块主要包括信号放大、滤波、下变频等环节。
通过这些信号处理步骤,接收机能够提高信号的质量和可靠性。
三、解码定位解码是GPS接收机中最重要的步骤之一。
在解码过程中,接收机将接收到的信号转换成数字信号,并提取出所需的导航数据。
这些导航数据包括卫星位置、时间信息以及其他辅助信息。
通过解码,接收机能够确定卫星的位置和时间,从而实现位置的计算和导航功能。
四、位置计算接收机通过收集多颗卫星的信号并计算其位置,进而确定接收机自身的位置。
这个过程是通过跟踪至少四颗卫星信号并使用三角测量原理来实现的。
通过测量接收机与卫星之间的信号传播时间差,接收机可以计算出自身与每颗卫星之间的距离。
通过多次测量和计算,接收机可以确定自身的位置坐标。
五、误差校正GPS接收机的精度受到多种误差的影响,包括大气延迟、钟差、多径效应等。
为了提高定位精度,接收机需要进行误差校正。
误差校正的方法主要有差分GPS、RTK(实时动态定位)以及基站辅助等。
这些方法通过引入辅助数据和技术手段,可以有效降低定位误差,提高精度。
六、应用领域GPS接收机在现代导航和定位领域有着广泛的应用。
除了汽车导航系统和航空导航系统外,GPS接收机还被广泛应用于军事、航海、地理勘测、测绘、野外探险等领域。
GPS接收机基带信号处理与FPGA实现的开题报告一、选题背景随着全球卫星定位系统(GPS)技术的快速发展,GPS接收机在军事、航空、航海、导航等领域的应用越来越广泛。
在GPS接收机中,基带信号处理系统是实现GPS信号检测和解调的关键部分之一,对GPS接收机的性能和功耗有着重要的影响。
目前,GPS接收机基带信号处理系统通常采用数字信号处理器(DSP)或现场可编程逻辑门阵列(FPGA)实现。
相比于DSP,FPGA具有更高的灵活性和并行处理能力,能够实现更复杂的算法和信号处理任务。
本课题旨在研究GPS接收机基带信号处理系统的FPGA实现方法,重点研究GPS信号的数字化、接收机的通道化、码跟踪、相位跟踪等关键技术,实现一个高性能、低功耗的GPS接收机基带处理系统。
二、研究内容本课题主要研究以下内容:1. GPS信号数字化技术的研究与实现。
采用数字信号处理技术对GPS信号进行采样、量化和滤波,实现对GPS信号的数字化处理。
2. GPS接收机通道化技术的研究与实现。
设计和实现GPS接收机的前端通道化模块,包括载频和载波同步、频率偏移校正、信号增益控制等功能。
3. GPS码跟踪技术的研究与实现。
采用数码滤波器和相关器等技术实现GPS码跟踪,提高接收机对GPS信号的解调灵敏度和精度。
4. GPS相位跟踪技术的研究与实现。
采用数字锁相环(PLL)等技术实现GPS相位跟踪,提高接收机对GPS信号的相位捕获和跟踪能力。
5. FPGA实现方法的研究与实现。
探索采用FPGA实现GPS接收机基带信号处理系统的方法和技术,优化系统性能和功耗。
三、研究意义本课题研究的GPS接收机基带信号处理系统的FPGA实现方法,具有以下意义:1. 增强我国在GPS领域的技术实力。
通过自主研发高性能、低功耗的GPS接收机基带处理系统,提高我国在卫星导航领域的技术实力和国际竞争力。
2. 推动GPS技术在民用领域的应用。
研究并实现高性能、低功耗的GPS接收机基带处理系统,将有助于推动GPS技术在民用领域的广泛应用,如智能交通、物流配送等领域。
如何进行卫星定位和导航数据处理卫星定位和导航技术在现代社会中发挥着越来越重要的作用。
无论是航空航天、军事作战还是智能交通,卫星定位和导航都是不可或缺的。
在这篇文章中,我将探讨如何进行卫星定位和导航数据处理的方法和技巧。
1. GPS和GNSS技术GPS(全球定位系统)是卫星定位和导航的重要技术之一。
它通过将多颗卫星的信号接收和处理来确定接收器的位置。
GPS系统由美国建立,但现在已经成为全球通用的定位系统。
除了GPS技术,还有GNSS(全球导航卫星系统)技术,如俄罗斯的GLONASS系统、欧洲的Galileo系统和中国的北斗系统。
2. 接收和处理卫星信号为了进行卫星定位和导航,首先需要接收卫星信号。
现代的定位设备通常使用全球导航卫星系统(GNSS)来接收信号。
这些信号可以通过天线或内置天线接收。
接收到卫星信号后,需要进行信号处理,以确定位置和导航信息。
3. 数据采集和处理在进行卫星定位和导航数据处理之前,首先需要进行数据采集。
数据采集可能包括接收器位置、卫星信号强度、时间戳和其他相关信息。
这些数据可以通过接收器的软件界面或其他设备进行记录。
一旦完成数据采集,就可以进行数据处理。
数据处理主要分为两个方面:卫星定位和导航解算。
卫星定位是确定接收器的位置,而导航解算是计算接收器的航向、速度和方向等导航信息。
4. 卫星定位算法卫星定位算法是进行卫星定位和导航数据处理的核心。
常见的卫星定位算法包括最小二乘法、加权最小二乘法、扩展卡尔曼滤波等。
这些算法可以根据不同的应用需求选择。
5. 数据校正和滤波在进行卫星定位和导航数据处理时,常常会遇到一些误差和干扰。
为了提高定位和导航的准确性,需要进行数据校正和滤波。
数据校正可以通过外部参考源、地图信息和其他传感器数据来进行。
而滤波则可以通过滑动窗口滤波、卡尔曼滤波等方法来减少误差和干扰的影响。
6. 数据可视化和应用最后,进行卫星定位和导航数据处理之后,可以将结果进行可视化和应用。
导航工程技术中的导航信号处理与解调技术导航工程技术是指通过各种设备和技术手段,对航行、定位和导航进行处理和解调,以实现精确的导航和定位功能。
其中,导航信号处理与解调技术是导航工程技术中至关重要的一部分。
一、导航信号处理技术导航信号处理技术通过对接收到的导航信号进行处理和分析,提取有用的信息,以实现导航和定位的功能。
导航信号一般包括全球卫星导航系统(GNSS)的信号和惯性导航系统(INS)的信号。
1. GNSS信号处理GNSS是目前最常用的导航系统,包括美国的GPS、俄罗斯的GLONASS、欧洲的Galileo和中国的北斗。
GNSS信号处理的主要目标是实现对导航信号的接收、解调、导航数据提取和误差校正等一系列处理步骤。
这些步骤需要精确的算法和高效的计算能力来完成。
2. INS信号处理INS通过测量姿态角、加速度和角速度等参数来估计导航状态。
INS信号处理的主要任务是对传感器测量值进行滤波和融合,得到准确的导航状态估计。
常用的滤波算法有卡尔曼滤波和粒子滤波等。
二、导航信号解调技术导航信号解调技术是对接收到的信号进行解调,将其转换为数字信号进行进一步处理和分析。
导航信号解调技术需要解调器来实现,解调器一般包括频率解调、相位解调和码元解调等功能。
1. 频率解调频率解调是将接收到的载波信号从高频信号转换为中频或基带信号。
常用的频率解调方法有锁相环(PLL)和数字频率合成(DDS)等。
2. 相位解调相位解调是将接收到的相位调制信号转换为基带信号。
常用的相位解调方法有鉴相器和相位锁定环(PLL)等。
3. 码元解调码元解调是将接收到的数字信号转换为二进制数据。
常用的码元解调方法有差分解调和卷积码解码等。
综上所述,导航工程技术中的导航信号处理与解调技术在实现导航和定位功能方面起着重要的作用。
通过对导航信号进行处理和解调,可以提取有用的信息,并最终实现准确的导航和定位。
随着技术的不断发展,导航信号处理与解调技术将不断提升,为导航工程技术的发展提供更加可靠和高效的支持。