RD算法_演示
- 格式:pdf
- 大小:1.03 MB
- 文档页数:12
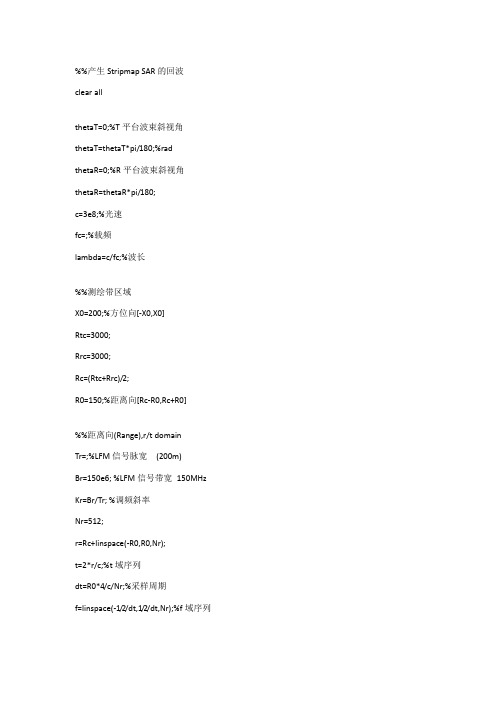
%%产生Stripmap SAR的回波clear allthetaT=0;%T平台波束斜视角thetaT=thetaT*pi/180;%radthetaR=0;%R平台波束斜视角thetaR=thetaR*pi/180;c=3e8;%光速fc=;%载频lambda=c/fc;%波长%%测绘带区域X0=200;%方位向[-X0,X0]Rtc=3000;Rrc=3000;Rc=(Rtc+Rrc)/2;R0=150;%距离向[Rc-R0,Rc+R0]%%距离向(Range),r/t domainTr=;%LFM信号脉宽(200m)Br=150e6; %LFM信号带宽150MHz Kr=Br/Tr; %调频斜率Nr=512;r=Rc+linspace(-R0,R0,Nr);t=2*r/c;%t域序列dt=R0*4/c/Nr;%采样周期f=linspace(-1/2/dt,1/2/dt,Nr);%f域序列%%方位向(Azimuth,Cross-Range),x/u domain v=100;%SAR 平台速度Lsar=300;%合成孔径长度Na=1024;x=linspace(-X0,X0,Na);%u域序列u=x/v;du=2*X0/v/Na;fu=linspace(-1/2/du,1/2/du,Na);%fu域序列ftdc=v*sin(thetaT);ftdr=-(v*cos(thetaT))^2/lambda/Rtc;frdc=v*sin(thetaR);frdr=-(v*cos(thetaR))^2/lambda/Rrc;fdc=ftdc+frdc;%Doppler调频中心频率fdr=ftdr+frdr;%Doppler调频斜率%%目标位置Ntar=3;%目标个数Ptar=[Rrc,0,1 %距离向坐标,方位向坐标,sigmaRrc+50,-50,1Rrc+50,50,1];%%产生回波s_ut=zeros(Nr,Na);U=ones(Nr,1)*u;%扩充为矩阵T=t'*ones(1,Na);for i=1:1:Ntarrn=Ptar(i,1);xn=Ptar(i,2);sigma=Ptar(i,3);rtn=rn+Rtc-Rrc;RT=sqrt(rtn^2+(rtn*tan(thetaT)+xn-v*U).^2);RR=sqrt(rn^2+(rn*tan(thetaT)+xn-v*U).^2);R=RT+RR;DT=T-R/c;phase=pi*Kr*DT.^2-2*pi/lambda*R;s_ut=s_ut+sigma*exp(j*phase).*(abs(DT)<Tr/2).*(abs(v*U-xn)<Lsar/2); end;%%距离压缩p0_t=exp(j*pi*Kr*(t-2*Rc/c).^2).*(abs(t-2*Rc/c)<Tr/2);%距离向LFM信号p0_f=fftshift(fft(fftshift(p0_t)));s_uf=fftshift(fft(fftshift(s_ut)));%距离向FFTsrc_uf=s_uf.*(conj(p0_f).'*ones(1,Na));%距离压缩src_ut=fftshift(ifft(fftshift(src_uf)));%距离压缩后的信号src_fut=fftshift(fft(fftshift(src_ut).')).';%距离多普勒域%%二次距离压缩,距离迁移校正原理仿真src_fuf=fftshift(fft(fftshift(src_uf).')).';%距离压缩后的二维频谱F=f'*ones(1,Na);%扩充为矩阵FU=ones(Nr,1)*fu;p0_2f=exp(j*pi/fc^2/fdr*(FU.*F).^2+j*pi*fdc^2/fc/fdr*F-j*pi/fc/fdr*FU.^2.*F); s2rc_fuf=src_fuf.*p0_2f;s2rc_fut=fftshift(ifft(fftshift(s2rc_fuf)));%距离多普勒域%%方位压缩p0_2fu=exp(j*pi/fdr*(FU-fdc).^2);%方位向压缩因子s2rcac_fut=s2rc_fut.*p0_2fu;%方位压缩s2rcac_fuf=fftshift(fft(fftshift(s2rcac_fut)));%距离方位压缩后的二维频谱s2rcac_ut=fftshift(ifft(fftshift(s2rcac_fut).')).';%方位向IFFTsubplot(221)G=20*log10(abs(s_ut)+1e-6);gm=max(max(G));gn=gm-40;%显示动态范围40dBG=255/(gm-gn)*(G-gn).*(G>gn);imagesc(x,r-Rc,-G),colormap(gray)grid on,axis tight,xlabel('Azimuth')ylabel('Range')title('(a)原始信号')subplot(222)G=20*log10(abs(src_fut)+1e-6);gm=max(max(G));gn=gm-40;%显示动态范围40dBG=255/(gm-gn)*(G-gn).*(G>gn);imagesc(fu,r-Rc,-G),colormap(gray)grid on,axis tight,xlabel('Azimuth')ylabel('Range')title('(b)距离多普勒域频谱')subplot(223)G=20*log10(abs(s2rc_fut)+1e-6);gm=max(max(G));gn=gm-40;%显示动态范围40dB G=255/(gm-gn)*(G-gn).*(G>gn); imagesc(fu,r-Rc,-G),colormap(gray) grid on,axis tight,xlabel('Azimuth')ylabel('Range')title('(c)RMC后的RD域频谱')subplot(224)G=20*log10(abs(s2rcac_ut)+1e-6); gm=max(max(G));gn=gm-60;%显示动态范围40dB G=255/(gm-gn)*(G-gn).*(G>gn); imagesc(x,r-Rc,G),colormap(gray) grid on,axis tight,xlabel('Azimuth')ylabel('Range')title('(d)目标图象')。

rd计算公式excel表格【实用版】目录1.引言:介绍 RD 计算公式和 Excel 表格2.RD 计算公式的含义和用途3.如何在 Excel 表格中输入和计算 RD 公式4.Excel 表格的优点和应用场景5.结论:总结 RD 计算公式和 Excel 表格的关系和重要性正文一、引言RD 计算公式,即投资回报率(Return on Investment)与投资风险(Dispersion of Return)的比值,是衡量投资项目风险调整收益的重要指标。
在实际应用中,我们常常需要用到 Excel 表格来计算和分析这个指标。
本文将详细介绍 RD 计算公式和如何在 Excel 表格中应用它。
二、RD 计算公式的含义和用途RD 计算公式可以帮助投资者在面临多个投资项目时,有效地衡量项目的风险调整收益,从而做出更明智的投资决策。
计算公式为:RD = (投资回报率 - 无风险收益率) / 投资风险。
三、如何在 Excel 表格中输入和计算 RD 公式1.首先,在 Excel 表格中输入投资回报率、无风险收益率和投资风险的数值。
2.接着,在一个单元格中输入以下公式:`=(投资回报率-无风险收益率)/投资风险`。
3.按 Enter 键,Excel 表格将自动计算出 RD 值。
四、Excel 表格的优点和应用场景Excel 表格具有强大的数据处理和分析功能,可以方便地对 RD 计算公式进行操作。
无论是在进行个人投资分析,还是企业在进行项目评估,Excel 表格都能提供有效的帮助。
同时,Excel 表格易于操作,使得 RD 值的计算变得更加简单快捷。
五、结论总的来说,RD 计算公式和 Excel 表格在投资决策中发挥着重要作用。
第1页共1页。

Y ou jump, I will not jump!断点回归的连续性假设断点回归RD是当代社会科学因果推断的最基本无害的大招之一。
比如我们要研究上一本大学是否能提高一个人的工资,如果直接对比上了一本大学和没上一本大学群体的工资,可能会因为上一本大学的天生能力更强而得出有偏误的结论,而能力等不可观测变量无法控制。
RD给我们提供了一个思想——观察一本线附近上下几分学生的工资。
比一本线低2分、1分的人工资差距不大,高2分、1分的差距也不大,但比一本线低1分的和正好达线的工资上有个跳跃,那这个跳跃就是一本大学对工资的作用。
一本线产生了一个天然的跳跃(两侧的人分别上一本和二本),如果在一本线两侧我们也看到了关注变量(工资)的跳跃,那么就识别了因果效应。
直觉上来看,RD的成立还需要一个关键假设:一本线产生了一个天然的跳跃,但一本线附近学生各特征不能有跳跃!否则就混淆了一本大学对工资的作用。
这就是连续性假设。
1、断点回归背景介绍Thistlethwaite and Campbell(1960)使用了RD方法后的40年,RD并没有在经济学中大规模使用,一大原因就是RD太像自然科学的随机实验了,太不像经济学传统方法了(比如上周我们BLUE_OLS读Black(1999)关于择校会使房价上升的论文(”Do better schools matter? Parental valuation of elementary education”),该文利用学区边界推断因果,应该说思想跟RD 很像,但没有按照RD框架来写,可能的原因是作者写作年代RD还并不流行)。
直到Hahn, Todd, and van der Klaauw(2001)把RD纳入到了我们熟悉的“反事实因果推断”框架下,如下图(原文图2)。
我们把断点看成一种treatment,断点右侧的是处理组,断点左侧的是控制组。
可以观测到处理后的处理组,和未处理的控制组。

雷达成像rd算法积分旁瓣比
雷达成像是一种利用雷达技术进行目标成像的方法,而积分旁
瓣比是评价雷达成像质量的重要指标之一。
积分旁瓣比是指成像过
程中目标信号与旁瓣(或者说杂波)信号之间的比值。
在雷达成像中,旁瓣通常是指由于雷达天线方向图、波束形状等因素引起的非
期望信号。
从技术角度来看,雷达成像中的积分旁瓣比是由雷达系统的性
能参数、成像算法以及目标场景等多个因素共同决定的。
首先,雷
达系统的天线方向图和波束形状会直接影响到旁瓣的产生,因此天
线设计和波束控制是影响积分旁瓣比的重要因素。
其次,成像算法
的设计也会对积分旁瓣比产生影响,比如在成像算法中采用的滤波、聚焦等处理方式会影响到目标信号和旁瓣信号的分离程度。
此外,
目标场景的复杂程度也会对积分旁瓣比产生影响,比如目标的反射
特性、背景干扰等因素都会影响到成像质量。
另外,从应用角度来看,积分旁瓣比的大小直接关系到雷达成
像的清晰度和目标分辨率。
较高的积分旁瓣比意味着目标信号相对
于旁瓣信号更突出,成像质量更高,目标的细节信息能够更加清晰
地呈现出来。
因此,在实际的雷达成像应用中,工程师们通常会根
据具体的成像要求和场景特点来调整雷达系统参数和优化成像算法,以获得更好的积分旁瓣比,从而获得更高质量的雷达成像结果。
总之,雷达成像中的积分旁瓣比是一个综合了技术、算法和应
用等多方面因素的重要指标,对于评价雷达成像质量和优化成像效
果具有重要意义。

rd成像算法通俗讲解同学们!今天咱们来聊聊超酷的RD 成像算法。
这玩意儿听起来挺高深莫测的吧?别担心,听我用大白话给你讲讲。
咱们得知道RD 成像算法是干啥的。
它就是一种能让我们看到很厉害的图像的方法。
就好像是一个魔法,能把一些我们看不到或者看不清楚的东西变得清晰可见。
那它到底是怎么做到的呢?咱们可以把它想象成一个大侦探在破案。
这个大侦探呢,就是我们的RD 成像算法。
一开始,它会收集各种线索。
这些线索就像是从不同地方传来的信号。
比如说,在医学上,可能是从人体内部反射回来的超声波信号;在雷达上,可能是从目标物体反射回来的电磁波信号。
收集到这些信号后,RD 成像算法就开始分析它们。
它会像一个聪明的数学家一样,用各种公式和计算方法来处理这些信号。
比如说,它会根据信号的时间差来判断物体的距离。
就好像我们听到声音从不同地方传来的时间不一样,就能知道那个地方离我们有多远。
RD 成像算法也是这样,通过分析信号的时间差,就能确定物体在空间中的位置。
然后呢,它还会根据信号的强度来判断物体的性质。
比如在医学超声成像中,如果一个地方的信号很强,可能就说明那里有一个比较硬的组织;如果信号很弱,可能就是一个比较软的组织。
在这个过程中,RD 成像算法还会用到一些很厉害的技术。
比如说,快速傅里叶变换。
这个名字听起来很吓人吧?其实它就是一种能让我们更快地处理信号的方法。
就像我们做数学题的时候,如果有一个好的方法,就能做得又快又准。
经过一系列的分析和处理,RD 成像算法就能画出一幅图像啦。
这幅图像就像是大侦探破案后画出的犯罪现场图一样,能让我们清楚地看到物体的形状、大小和位置。
在医学上,RD 成像算法可以帮助医生看到人体内部的情况,比如肝脏、心脏、血管等等。
这样医生就能更好地诊断疾病,制定治疗方案。
在雷达上,RD 成像算法可以帮助我们探测飞机、船只、导弹等目标物体。
这样我们就能更好地保卫国家的安全。
同学们,RD 成像算法是不是很厉害呢?虽然它的原理有点复杂,但是只要我们多学习、多思考,就一定能理解它。
rd值的计算方法RD值(RelativeDensity),又称相对密度,是指比率衡测量结果与相同量纲的标准结果间的比值。
多用于物理和化学实验测量中,是一个重要的参数。
它的唯一准备就是要知道量纲和标准结果。
一、计算RD值的公式RD值的计算公式很简单:RD值 =量结果/标准值例如计算某物体质量时,其RD值为:RD值 =量质量/标准质量二、RD值的意义RD值的意义在于它可以比较出不同测量结果与标准值之间的差异。
在物理和化学实验中,人们通常都会根据实验结果推算出所测东西的实际值,若未知测量单位,可以通过RD值来推算出相应的实际值,从而获得较为准确的实验结果。
RD值的计算还能帮助实验者准确地计算出物体的重量和体积,即便参考标准由于温度或其他因素而发生了变化,也能获得准确的结果。
另外,计算RD值时还可以用来比较不同实验结果之间的差异,以判断出实验的成功与否。
三、应用示例1.比较重量假设有一物体的实际重量为1kg,经测量得出的重量数据为900g,此时可以计算出此物体的RD值为:RD值=900g/1kg=0.9可以看出,两个数据之间的差距只有10%,说明测量结果是相当可靠的。
2.比较体积假设有一个物体的实际体积为1000 mL,经测量得出的体积数据为800 mL,此时可以计算出此物体的RD值为:RD值=800 mL/1000 mL=0.8可以看出,两个数据之间的差距有20%,说明测量结果虽然不太可靠,但仍可用于大概估计实际的体积数值。
四、结论RD值是用来衡量测量结果与实际结果之间差距的重要参数,是物理和化学实验中常用的测量手段,使用它可以有效地比较测量结果与标准值之间的差异以及计算出物体的准确重量和体积,但也需要注意实验环境中未知因素对测量结果可能造成的影响。
偏差RD计算公式
1 引言
偏差RD计算公式是通常用于计算统计数据拟合的精确度的一种公式。
通常,它用于测量模型是否真正拟合数据,也用于评估统计模型的准确性。
2 计算公式
RD计算公式的定义是:
RD=(E2-E1)/E2
其中,E1是对模型的预测误差,E2是对真实数据的预测误差。
也就是说,它通过将模型和真实数据预测误差的比值作为衡量指标,来评估模型预测精度。
3 计算步骤
首先,将指定数据划分为实际数据和模型预测数据。
由于这些数据是实时计算的,所以可以从这两个数据集中,计算对实际数据和模型预测数据所做出的预测误差。
接下来,将这两个误差之间的比值计算出来,然后根据RD计算公式计算出RD值。
4 结论
偏差RD计算公式可以用来评估模型生成的数据和实际数据之间的相对误差程度,从而对模型准确度进行评估。
然而,由于它仅涉及两个误差之间的比较,因此仅能在较小程度上评估模型拟合效果。
RD成像算法分析数据采集是RD成像算法的第一个步骤,它是通过将X射线束传递通过被测物体,收集经过物体后的射线。
在数据采集过程中,可以采用不同的配置,如平行束、锥形束和扇形束等。
在数据采集过程中,可以通过调整射线束的角度和入射点的位置来获取多个投影数据。
相比传统的X射线成像方法,RD成像算法通过多个视角的数据采集,能够提供更丰富的信息。
数据采集完成后,下一步需要进行图像重建。
图像重建是通过利用采集到的数据来推断物体的内部结构和形状的过程。
RD成像算法中常用的图像重建方法是反投影算法。
具体来说,反投影算法首先将采集到的数据进行相对应的补偿,比如去除背景噪声和伪影等。
然后,根据采集到的数据以及射线在物体中的传播路径,计算每个像素点上的衰减系数。
最后,将这些衰减系数映射到图像空间中,即可得到重建的图像。
相比传统的X射线成像方法,RD成像算法具有以下几个优点。
首先,它能够产生高分辨率的图像。
由于RD成像算法是利用多个视角的数据进行重建,因此可以显著提高图像的分辨率。
其次,RD成像算法的辐射剂量相对较低。
由于可以通过多个视角的数据进行重建,可以降低辐射剂量,减少对被测物体的伤害。
此外,RD成像算法还具有非侵入性。
由于RD成像是一种非接触性的成像方法,可以对生物组织进行非侵入性的检测。
RD成像算法在医学影像处理中有着广泛的应用。
首先,它可以用于疾病诊断和治疗。
比如在肺癌的早期诊断中,RD成像算法可以提供高分辨率的三维图像,帮助医生定位病灶和评估肿瘤的大小和位置,提高治疗的准确性和效果。
其次,RD成像算法还可以用于血管造影。
通过获取视觉上鲜明的血管图像,可以检测血管病变如狭窄或阻塞,并为血管手术提供导航。
此外,RD成像算法还可以用于关节病变的检测和分析、心血管疾病的诊断和评估等。
总而言之,RD成像算法是一种用于医学影像处理的先进技术。
它通过多个视角的数据采集和图像重建,可以生成高分辨率、低辐射剂量、非侵入性的三维图像。