基于BP神经网络的船舶航迹控制技术_郭文刚
- 格式:pdf
- 大小:1.08 MB
- 文档页数:7
BP神经网络在船舶与海洋工程中的应用研究
高明正;张火明;金尚忠
【期刊名称】《舰船科学技术》
【年(卷),期】2008(030)001
【摘要】人工神经网络作为一个具有高度非线性映射能力的计算模型,在工程中具有广泛的应用前景.在数值预测方面,它不需要预选确定样本的数学模型.仅通过学习样本数据即可以进行预测.介绍了BP神经网络,并针对实际应用中收敛速度慢,平台效应等问题对网络进行了优化,给出了改进的三层BP神经网络算法.最后结合船舶与海洋工程的一些实际问题.探讨了利用改进的BP神经网络进行数值预测的方法和应该注意的问题,并给出了一些有益的建议.实验表明,神经网络的预测精度在船舶与海洋工程是可以接受的.
【总页数】8页(P34-40,44)
【作者】高明正;张火明;金尚忠
【作者单位】中国计量学院信息工程学院,浙江,杭州,310018;中国计量学院信息工程学院,浙江,杭州,310018;中国计量学院信息工程学院,浙江,杭州,310018
【正文语种】中文
【中图分类】U661.3
【相关文献】
1.改进的BP神经网络在船舶与海洋工程中的应用研究 [J], 张火明;孙志林;高明正
2.PCA算法在银屑病BP神经网络建模中的应用研究 [J], 詹秀菊
3.BP神经网络在跨既有线高速铁路桥梁施工安全风险评估中应用研究 [J], 刘冬冰
4.改进的BP神经网络在车辆目标识别中的应用研究 [J], 刘路
5.人工蜂群算法+BP神经网络模型在短期电力负荷预测中的应用研究 [J], 王天力因版权原因,仅展示原文概要,查看原文内容请购买。
智能制造数码世界 P .263fi done #exitecho `date +"%Y-%m-%d %H:%M:%S"` exit >> /auditd_restart.logexit 02.2.如何保护审计记录审计记录保存在本机显然是不安全的,审计记录可以被人为恶意删除或因设备故障丢失,在安全事件发生后,没有日志记录很难找到事件原因。
因此我们需要在系统中单独搭建日志服务器,将本机日志传送到日志服务器,在日志服务器中保存。
3.恶意代码防护恶意代码防护包括恶意入侵和病毒,在应用程序部署完成后应及时关闭不必要的服务和端口,安装病毒查杀软件,启用入侵检测功能,保持系统补丁和病毒库及时更新。
3.1.是否必须安装杀毒软件安装杀毒软件可能会造成系统性能下降,并引发其他位置风险,顾对于核心业务服务器酌情处理,如未安装则应避免通过USB 及光驱等设备直接拷贝文件,在安全域边界处应采用防毒墙对恶意代码进行查杀。
如果安装杀毒软件则应在系统内部部署恶意代码升级服务器,通过升级服务器保持客户端恶意代码库的更新。
建议系统防病毒网关与杀毒软件采用不同的恶意代码库。
3.2.是否必须对系统补丁进行更新系统补丁补丁与杀毒软件类似,系统补丁的更新会产生一定的潜在风险,建议在实验系统先行部署,如无异常,再进行生产系统部署。
3.3.入侵防护建议在系统边界处部署入侵防护设备,对系统的入侵防护进行整体考虑。
4.结束语因运行应用千差万别,顾服务器有着各自不同的安全需求,在对其进行安全加固时应从易用性、稳定性等多方面进行综合考虑,文中的加固方法并不适用于所有服务器,这里仅是起到抛砖引玉的作用,给服务器管理者提供一些安全加固的思路,文中不妥之处请读者加以指正。
参考文献[1]GB/T 22239-2008 信息安全技术 信息系统安全等级保护基本要求。
作者简介段垚(1980.2-),男,汉族,北京人,硕士,国家广播电视总局监管中心高级工程师,研究方向:广播电视信息安全。
基于神经网络的船舶动态定位与通信技术研究近年来,随着各国经济和科技的发展,海洋运输业获得了快速发展。
船舶定位和通信技术的发展成为了海洋运输业的关键支撑。
目前,基于神经网络的船舶动态定位和通信技术已经成为了一种热门的研究方向,本文将对这一领域进行深入探讨。
一、神经网络在船舶动态定位中的应用船舶动态定位是指根据不同环境、条件下的船舶状况进行动态位置的确定,并实时跟踪船舶,在运输安全和调度中发挥着重要作用。
神经网络技术是一种模拟神经元的计算方式。
利用神经网络算法,可以建立复杂的数学模型,从而实现对船舶动态定位的精确、实时计算。
1.1 神经网络模型建立神经网络模型是船舶动态定位中的核心,其所建立的模型会直接影响到船舶位置的精度和准确性。
目前,神经网络模型主要有三种建立方式:(1)基于BP神经网络的模型BP神经网络结构简单、容易理解,适用于多输入、单输出的动态定位问题。
它通过反向传播算法不断调整权值和偏置,训练网络整体误差,从而不断优化网络的预测精度。
(2)基于RBF神经网络的模型RBF是一种基于径向函数的神经网络,其具有快速收敛、可逆性等优点,适用于小样本数据集的定位问题。
RBF神经网络适合于逼近未知的多变函数并进行预测。
(3)基于FNN神经网络的模型FNN神经网络由多个BP网络组成,能够进行并行计算和预测,适用于大量数据和高精度的动态定位问题。
FNN神经网络需要较长的训练时间和更高的运算能力,但其预测精度更高,适用于复杂环境下的动态定位。
1.2 神经网络模型调参神经网络模型在实际应用中,需要通过调整各层之间节点数、权值、偏置项等参数,以达到更高的预测精度。
模型调参需要遵循以下原则:(1)模型中节点数过多或过少,均会导致模型预测精度下降。
(2)权值和偏置项的调整需要进行多次迭代,以达到更优参数。
(3)训练集和测试集需要充分考虑,以避免模型过拟合或欠拟合。
二、神经网络在船舶通信中的应用船舶通信指的是在摩擦剧烈的海面和复杂的海上环境中,船舶与其他船只或地面通信站之间进行信息交互。
基于改进BP神经网络的船舶轨迹识别方法凡甲甲; 祁云嵩; 葛霓琳【期刊名称】《《计算机工程与设计》》【年(卷),期】2019(040)012【总页数】6页(P3639-3644)【关键词】轨迹识别; BP神经网络; 船舶自动识别系统; 附加动量; 自适应学习【作者】凡甲甲; 祁云嵩; 葛霓琳【作者单位】江苏科技大学计算机学院江苏镇江212000【正文语种】中文【中图分类】TP398.10 引言加强水上交通管理和监控,及时发现安全隐患并采取相应的措施,既是保证船舶安全航行、港口正常作业生产的迫切需要,也是防止各种违法海上活动、保护海洋环境的有效手段。
目前大多数研究是对船舶轨迹信息进行训练建立预测[1,2]或异常[3]模型,由于海上情况多变,船舶的行为预测和异常行为检测并不能有效处理海上未知的状况。
在前人研究的基础上,引入动量因子[4,5]和自适应学习速率[6,7]来优化BP神经网络[8]性能,能够较好地改善BP神经网络的易陷入局部最小值、收敛速度慢等缺点,最后将改进BP神经网络应用到船舶轨迹识别[9]问题中,与传统BP神经网络进行对比实验,达到了预期的识别效果。
1 AIS信息的采集与预处理1.1 AIS信息的采集船舶的AIS信息[10]的动态信息主要为坐标、航速、航向等,静态信息主要为船舶类型、长度、宽度以及吨位,动态信息体现了船舶的轨迹行为特征[11]。
为了区分不同船舶的轨迹,将船舶海上业务识别码(maritime mobile ser-vice identity,MMSI)加入行为表征数据中,船舶在行驶过程中不定时播报位置及速度信息存入数据接收服务器中,定时从服务器中取出所需的AIS信息报文文件。
船舶的AIS信息显示在系统界面中如图1所示。
图1 AIS信息列表1.2 AIS信息预处理采集到的AIS信息的数据庞大,有数据冗余性强、错误数据多等异常情况,对采集到的AIS数据进行预处理,删除MMSI为0,经纬度异常的AIS信息,对删除异常AIS数据后的船舶轨迹进行特征分析和特征点处理,目的是找出轨迹的航速、航向等代表轨迹线空间几何特征的显著快速变化的点,使得船舶特征轨迹不仅可以较大程度地还原原始轨迹,还能减少数据的计算量,如式(1)所示(1)其中,Δv为平均航速变化率,vt1, vt2为t1, t2相邻时刻船舶轨迹点的航速。
基于BP神经网络的船舶航迹控制技术随着船舶制造水平的提高和海洋科技的不断发展,船舶行驶越来越普遍。
在无人驾驶的趋势下,对于船舶航迹控制技术的需求也越发强烈。
基于BP神经网络的船舶航迹控制技术是一种高效、准确的控制方法。
BP神经网络由输入层、中间层和输出层构成。
输入层接收外部信息,通过传递到中间层进行信息处理,最终输出结果。
BP神经网络的训练是通过反向传播算法进行的,即根据输出和实际误差逐层逆向调整各层节点的权值。
在船舶控制中,BP神经网络的输入层可以接收各种传感器测得的水平、垂直方向的速度、角度以及海流等船舶运动状态量;输出层则输出需要调整的舵角等控制量。
在船舶控制方面,BP神经网络的优势在于其能够适应不确定、非线性等复杂系统特性,具有较好的泛化能力,并且具有自适应调整能力。
此外,BP神经网络的训练也非常方便,可以利用历史数据进行训练,减少了对实时控制系统的干扰。
航迹控制过程中,BP神经网络可以根据船舶状态和外部环境实时更新信息,进行快速、准确的控制输出,从而实现预期航迹的维持。
当然,BP神经网络也存在一些问题。
首先,训练过程需要大量的数据,需要有足够的历史数据进行事先编程。
其次,在实际控制过程中,如果船舶状态发生急剧变化,BP神经网络可能需要时间来适应新的船舶状态,导致控制延迟。
此外,BP神经网络的结构也需要根据实际情况进行设计和调试,过于复杂的设计可能导致训练成本过高,实时控制效果不佳。
综上所述,基于BP神经网络的船舶航迹控制技术仍然是未来发展的方向。
作为智能船舶技术的重要组成部分,BP神经网络控制技术具有非常广阔的应用前景和市场空间。
当然,在实际应用过程中,需要特别注意与其他控制系统的配合、调试和优化,以实现更加可靠、稳定的自动船舶控制。
相关数据可以是任何与船舶航迹控制相关的数据,例如海浪、气象、船舶运行状态等。
在这里,我们可以列举以下几类数据并进行简单的分析。
1. 海浪数据:海浪数据是影响船舶运行的重要因素之一。
基于BP神经网络的船舰目标识别分类船舶目标识别是海洋、海上交通、船舶导航、船舶安全管理等领域的基础问题。
传统的基于规则的方法虽然能够对目标进行识别,但在实际应用中面临识别规则的不确定性和难以达到精准度高等问题。
这时,基于BP神经网络技术的目标识别分类能够提供一种新的解决方案。
BP神经网络是一种重要的人工神经网络,由于其学习和分类能力优异而广泛应用于目标识别领域。
将这种方法应用于船舶目标识别分类,我们需要采取以下步骤:1. 数据集的准备:选择一定数量的船舶图片,包括不同类别的船只,如货轮、客轮、救援船、油轮等。
并且对这些图片进行预处理:图像去噪、灰度化、二值化等,以便磨炼神经网络的学习能力。
2. BP神经网络的建立:在读取并处理好数据集后,需要对BP 网络进行设置。
其包括输入层、隐藏层和输出层。
输入层用来接受已处理好的图像数据,隐藏层是为了将输入信号转换成处理后的中间结果,输出层则负责识别不同类别的船只。
3. 数据训练:利用已准备好的数据集对神经网络进行训练。
将数据集中的图片输送给输入层,经过隐藏层处理后,输出层将船只的类别输出。
利用BP神经网络反向传播调整神经元之间的连接权值,直至输出结果符合预期结果,即实现了对不同类别船只的准确识别。
4. 数据验证:对训练好的BP神经网络进行测试验证。
采用另一组测试数据,将测试数据输入到神经网路中,并输出结果。
通过比对测试结果和真实结果,评估神经网络的识别性能以及是否存在过拟合的问题。
BP神经网络不仅可以用于船舶目标的识别分类,还可以应用于其他多种目标识别分类场景中。
它是一种有效的人工智能技术,可以大幅提高目标识别精度和自动化程度。
作为人工智能技术之一,未来的发展趋势也指向越来越智能化,未来将有更多的AI技术被应用于目标识别分类领域。
船舶目标识别分类需要大量的数据进行训练和验证。
下面将列出与船舶目标识别相关的数据并进行分析。
1. 船舶图片数据集:用于训练和测试船舶目标识别的数据集。
基于HHT和BP神经网络的船舶电力系统故障定位陈显云;施伟锋;卓金宝【摘要】针对船舶电力系统故障难以精确定位的情况,将Hilbert-Huang变换(HHT)和BP神经网络应用于船舶电力系统故障节点定位.首先,采集各节点电流信号,经过EMD分解得到若干IMF分量,对第一个IMF分量进行Hilbert变换得到其瞬时振幅向量.然后,将各节点的瞬时振幅向量之和作为电流信号的特征量输入到带有动量因子的BP神经网络中进行训练,利用训练好的神经网络进行故障节点定位.最后,通过仿真实验验证了所提方法的有效性.【期刊名称】《船电技术》【年(卷),期】2018(038)006【总页数】5页(P26-30)【关键词】船舶电力系统;故障定位;HHT;瞬时振幅向量;BP;神经网络【作者】陈显云;施伟锋;卓金宝【作者单位】上海海事大学,上海 201306;上海海事大学,上海 201306;上海海事大学,上海 201306【正文语种】中文【中图分类】TP277目前船舶电力系统朝着大型化、集成化和模块化的方向发展,船舶的电气化程度越来越高,同时对船舶电力系统的安全性也提出了更高的要求[1]。
系统在发生故障时如果能够迅速找出故障位置,对提高系统稳定性和电能质量有重要意义。
船舶电力系统的故障定位主要分为两个步骤:第一步为故障特征提取;第二步为故障定位。
特征提取的方法主要有傅里叶变换、小波变换和Hilbert-Huang变换等[2]。
傅里叶变换(FFT)适用于处理线性、平稳信号,但处理非平稳信号却存在很大缺陷;短时傅里叶变换(STFT),虽然可以同时获得信号的时域和频域图形,但由于其窗口固定,分析的精度较低;小波变换虽然可以处理非线性、非平稳信号,但是它是非适应性的,小波基函数一旦选取就无法更改[3]。
HHT是目前研究比较多的一种能够自适应的处理非线性、非平稳复杂信号的方法。
它既具有小波变换的多分辨率的特性,同时还不像小波变换那样受到小波函数和尺度函数的限制[4]。
基于BP神经网络的船舱温度预警系统船舱温度控制是保障船舶安全和乘客安全的关键因素之一。
随着科技的不断发展,人们希望能够通过智能技术来实现对船舱温度的自动监测和控制。
BP神经网络是一种常用于数据预测和分类的机器学习算法,可以通过对历史数据的学习来预测未来温度值。
因此,本文将基于BP神经网络构建一套船舱温度预警系统。
系统架构本系统基于客户端/服务器模型,分为两个部分:温度采集模块和预测模块。
温度采集模块负责实时采集船舱的温度数据,并将其发送给预测模块。
预测模块通过BP神经网络算法来训练历史数据,从而预测未来的温度趋势。
当预测模块检测到船舱温度可能超过安全范围时,将发出报警信号提醒操作人员及时采取措施。
功能模块1. 数据采集模块:该模块负责采集船舱内的温度数据,并实现数据的实时传输,以便预测模块进行处理分析。
2. 数据处理模块:该模块是整个系统的核心,使用BP神经网络算法对历史温度数据进行学习,形成预测模型,并根据输入的实时温度数据输出相应的温度趋势预测结果。
3. 预警提示模块:该模块用于监测船舱温度是否达到预警值,当温度接近或超过预警值时,系统将自动进行报警提示,并通过界面上的警告灯等方式提示操作人员及时采取措施。
4. 手动控制模块:该模块用于手动调节船舱内的温度,当预警提示模块发生警告时,运营人员可以通过该模块进行手动控制。
优点1. 预测准确:基于BP神经网络算法的预测模型,在对历史数据进行学习的情况下,可以预测出较为准确的未来趋势,以便运营人员及时采取灵活措施。
2. 可自主控制:整个系统采用客户端/服务器模型,可以进行自主控制。
3. 面向未来:BP神经网络算法是一种面向未来的学习算法,具有很好的实时性和预见性。
缺点1. 数据需求量大:BP神经网络算法需要大量的历史数据进行训练,否则其预测效果不佳。
2. 计算成本高:BP神经网络算法需要进行大量的运算才能得到预测结果,因此需要较高的计算资源支持。
结论本系统基于BP神经网络算法构建的船舱温度预警系统具有明显的优越性。
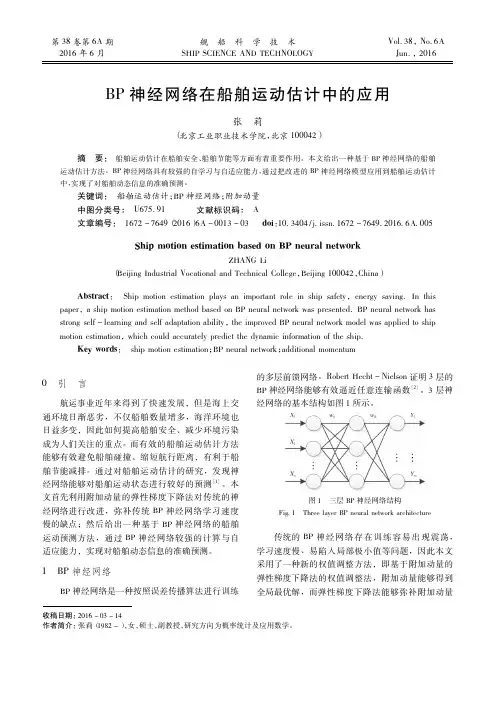
山东科学SHANDONGSCIENCE第31卷第4期2018年8月出版Vol.31No.4Aug.2018DOI:10.3976/j.issn.1002 ̄4026.2018.04.002ʌ海洋科技与装备ɔ收稿日期:2017 ̄12 ̄04基金项目:山东省科技重大专项(2015ZDZX08001)ꎻ国家重点研发计划(2016YFE0205700)作者简介:李小峰(1983 )ꎬ女ꎬ硕士ꎬ工程师ꎬ研究方向为自动化控制系统㊁嵌入式系统与智能控制ꎮ∗通信作者ꎬ于慧彬ꎮE ̄mail:binbinyu@163.comꎮ基于BP神经网络的船舶航向智能PID控制研究李小峰ꎬ于慧彬(齐鲁工业大学(山东省科学院)ꎬ山东省科学院海洋仪器仪表研究所ꎬ山东省海洋监测仪器装备技术重点实验室ꎬ国家海洋监测设备工程技术研究中心ꎬ山东青岛266001)摘要:针对船舶航向控制非线性的特性ꎬ以船舶航向运动一阶KT模型为研究对象ꎬ设计了基于BP神经网络的自整定PID算法航向控制器ꎮ将传统PID与BP神经网络结合ꎬ对被控对象由BP神经网络进行辨识ꎬ给出PID控制参数ꎬ由PID控制算法进行控制并优化收敛速度ꎮ根据真实渡轮船舶特征参数ꎬ利用MATLAB/Simulink仿真软件建立船舶航向运动控制系统模型ꎮ仿真结果表明ꎬ基于BP神经网络的PID控制系统超调小㊁鲁棒性好ꎬ可长时间稳定工作ꎬ几乎无稳态误差ꎬ控制算法的实用性以及动态控制系统的优越性得到验证ꎮ关键词:船舶操纵ꎻPID控制ꎻBP神经网络ꎻMATLAB仿真中图分类号:TP273㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002 ̄4026(2018)04 ̄0008 ̄07ResearchonintelligentPIDcontrolofshipcoursebasedonBPneuralnetworkLIXiao ̄fengꎬYUHui ̄bin(ShandongProvincialKeyLaboratoryofMarinemonitoringinstrumentequipmenttechnologyꎬNationalEngineeringandTechnologicalResearchCenterofMarineMonitoringEquipmentꎬInstituteofOceanographicInstrumentationꎬQiLuUniversityofTechnology(ShandongAcademyofSciences)ꎬQingdao266001ꎬChina)AbstractʒAccordingtothenonlinearcharacteristicsofshipcoursecontrolꎬandtakingthefirst ̄orderKTmodelofshipcoursemotionastheresearchobjectꎬtheself ̄tuningPIDalgorithmcoursecontrollerbasedonBPneuralnetworkwasdesigned.CombiningthetraditionalPIDandtheBPneuralnetworkꎬthecontrolledobjectwasidentifiedbytheBPneuralnetworkꎬthePIDcontrolparametersweregivenꎬandthePIDcontrolalgorithmwasusedtocontrolandoptimizetheconvergencespeed.BasedonatrueferryᶄscharacteristicparametersꎬtheshipᶄscoursemotioncontrolsystemmodelwasestablishedusingMATLAB/Simulinksimulationsoftware.Thesimulationresultsshowthatthedesignhassmallovershootꎬgoodrobustnessꎬcapabletoworksteadilyforalongtimeꎬandalmostnosteady ̄stateerror.ThepracticabilityofthecontrolalgorithmandthesuperiorityofthePIDcontrolsystemwereverified.KeywordsʒshipmanoeuvringꎻPIDcontrolꎻBPneuralnetworkꎻMATLABsimulation㊀㊀船舶航向控制是船舶航行操纵的重要组成部分ꎬ其性能的优劣决定了航行的安全性和经济性ꎬ船舶航向控制系统是船舶的关键设备之一ꎮ船舶航向运动模型是一种典型非线性时变系统ꎬ为便于进行控制系统设计ꎬ在船舶航行保持阶段可将此运动模型进行简化ꎬ用一阶KT模型对船舶航向运动进行描述ꎬ这种传统PID第4期李小峰ꎬ等:基于BP神经网络的船舶航向智能PID控制研究控制系统结构简单ꎬ易于实现[1]ꎮ对于船舶航向运动这种大惯性系统而言ꎬ控制系统的稳定性是系统设计时需重点考虑的问题ꎮ常规的自适应算法参数整定困难ꎬ一般都是凭借操作人员的经验ꎬ根据驾驶船舶的航速㊁海况㊁船舶装载情况以及船体吃水等诸多因素ꎬ进行人工航向调整ꎬ缺乏对船舶动态及海况变化的自适应能力ꎬ易受主观人为因素的影响ꎮ由于船舶自身的非线性特性ꎬ控制效果与稳定性难以保证ꎮ为改善上述传统控制系统的局限性ꎬ本文利用BP神经网络自身具备的良好逼近非线性系统的能力ꎬ再结合传统的PID船舶控制理论ꎬ针对某型渡轮航行时的航向特性ꎬ设计了基于BP神经网络的自适应控制策略ꎮ运用神经网络的自学习能力ꎬ辨识出PDI控制系统所需的三个关键参数ꎬ通过动态调整控制参数并优化神经网络的收敛速度ꎬ实现自整定的PID控制器ꎬ在MATLAB/Simulink环境下对所设计系统的性能进行了软件仿真验证ꎮ1㊀船舶运动数学模型对于直线稳定的船舶ꎬ根据一阶KT方程描述出的船舶操纵运动响应能够满意地逼近船舶的实际运动ꎮ为达到工程应用的要求ꎬ将一阶KT方程用于船舶控制系统控制器的设计中ꎬ把船舶整体看成刚体ꎬ并假定船舶在回转时只受到转艇时受到的力矩和水的阻力力矩的作用ꎬ船舶舵机采用下式模型表示:Ṫr+r=Kδꎬ(1)式中ꎬK称为回转性指数ꎬ为转舵首力矩系数与阻尼力矩系数之比ꎬ表示回转性优劣ꎬK值越大ꎬ表示回转性越好ꎻT称为应舵指数或追随性指数ꎬ为惯性力矩系数与阻尼力矩系数之比ꎬ表示追随性优劣ꎬT值越小ꎬ追随性越好ꎬ若T为负值ꎬ则船舶航向不稳定ꎻr为旋回角速度ꎻδ为命令舵角[2]ꎮ建模时还需考虑船舶舵机的实际情况ꎬ应满足舵角δɤ35ʎꎬ舵速̇rɤ3ʎ/sꎮ2㊀传统航向控制原理航向控制系统是一种典型的自动控制系统ꎬ系统以船舶航向角为控制对象ꎬ接收电罗经等航向测量设备输出的船舶航向信号㊁舵角反馈机构反馈的舵角信号㊁航向指令设定信号等输入信号ꎬ经过航向控制系统综合运算给出指令舵角信号ꎬ并控制舵机转动ꎬ实现对船舶航向的有效控制ꎮPID控制属于线性控制方法ꎬ传统PID控制系统原理如图1所示[3]ꎮ根据航向操作给定指令r(t)与实际舵机输出值y(t)构成的方向控制偏差e(t)ꎬ对实际输出与预设值之间的差值分别进行积分运算㊁比例运算及微分运算ꎬ然后将前述各个运算结果相加ꎬ如图所示ꎬ即可得到对船舶舵机的控制输出结果u(t)ꎬ并将该结果输出到舵机ꎮ反复此过程实现对船舶航向的控制ꎮ图1㊀PID控制系统原理框图Fig.1㊀PrincipleblockdiagramofPIDcontrolsystem传统航向PID控制器的输入输出关系为:u(t)=Kp [e(t)+1Tiʏt0e(t)dt+de(t)dt]ꎬ(2)式中ꎬu(t)为输出值ꎬe(t)为取样偏差值ꎬ即e(t)=r(t)-y(t)ꎻKp为比例系数ꎬTi为积分时间常数ꎻTd为微分时间常数[4]ꎮ9山㊀东㊀科㊀学㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2018年3㊀船舶航向智能PID控制器设计根据传统PID(proportion(比例) ̄integral(积分) ̄derivative(微分))系统控制理论ꎬ需要调配PID控制系统中积分㊁微分以及比例运算三个环节的控制作用ꎬ使各运算环节相互制约又相互配合ꎮ三种运算环节不能仅仅进行简单的线性组合叠加ꎬ而是需要在各种多样化的非线性组合中找出符合实际船舶操控的最佳组合方式[5]ꎮ神经网络在处理非线性函数时具有极强的逼近能力ꎬ同时自身还具备自学习能力ꎬ依据船舶的实际参数情况设定最优指标ꎬ神经网络能够学习船舶航向操纵控制系统的反馈结果ꎬ根据反馈情况自动调整神经网络系统内部的设计参数ꎬ重复此过程直至控制结果达到航向PID控制的预设误差要求范围内为止ꎮ使PID控制器能够快速响应船舶结构㊁相关运行参数以及输入信号的变换ꎬ并在有外界扰动输入时能够抵御其对控制系统的影响ꎮ应用BP神经网络理论ꎬ设计基于船舶控制参数Kd㊁Ki㊁Kp的具有自学习能力的PID控制器[6]ꎮ基于BP网络设计的具备自学习能力的PID控制系统结构框图如图2所示ꎮ该控制系统以传统经典PID控制系统为基础ꎬ经典PID船舶航向控制器直接对舵机进行闭环控制ꎬ系统内3个主要参数:积分系数Ki㊁微分系数Kd及比例系数Kp均为在线调整方式ꎮ在该基础上设计增加BP神经网络控制单元ꎬ该单元将接收系统的运行状态ꎬ结果自学习后输出用于Kp㊁Ki㊁Kd这三个用于航向控制调整的参数到PID控制器中作为控制器的输入ꎮ通过BP神经网络的自学习及加权调整ꎬ使输出参数对应于预设工况情景下的最优控制PID参数[7]ꎮ图2㊀基于BP神经网络的航向PID控制系统原理框图Fig.2㊀PIDcontrolsystemblockdiagrambasedonBPneuralnetwork经典的PID控制器算法我们采用增量式数字PID控制算法ꎬ该算法在控制过程中每次输出的控制值仅是控制的增量ꎬ执行器每次变化量较小ꎬ被控对象参数变化平缓ꎬ控制系统相对稳定ꎮ其控制算法公式为:u(k)=u(k-1)+Δu(k)ꎬ(3)式中ꎬΔu(k)为PID控制器第k次相对于第(k-1)次控制量的增量ꎬ即Δu(k)=Kp(e(k)-e(k-1))+Kie(k)+Kd(e(k)-2e(k-1)+e(k-2))ꎮ(4)认为Kp㊁Ki㊁Kd为随系统运行状态的可调系数ꎬ则有:u(k)=f[u(k-1)ꎬKpꎬKiꎬKdꎬe(k)]ꎬ(5)即u(k)是与u(k-1)ꎬy(k)ꎬKpꎬKiꎬKd相关的非线性函数ꎬ可通过样本训练ꎬ利用BP神经网络获得最优解ꎬ从而得到船舶航向控制的最优控制系统ꎮ此次的BP神经网络设计采用结构如图3所示的三层BP网络结构ꎮ网络分为输入层㊁隐含层与输出层三层ꎮ其中ꎬ输入层设置有输入节点M个ꎬ隐含层设置有运算节点N个ꎬ输出层设置有网络节点Q个ꎮ船舶航行控制系统的运行状态数据通过输入节点录入神经网络ꎬ数据在输入神经网络时需预先进行归一化处理ꎮ设计BP神经网络的输出节点分别对应于PID航向控制系统的调节参数Ki㊁Kd㊁Kpꎮ考虑到航向PID控制系统中上述三个参数的取值范围均不能为负ꎬ因此在输出层神经元激活函数设计时ꎬ该函数设计选取非负的Sigmoid函数ꎮ对于BP神经网络隐含层神经元激活函数ꎬ在设计时则相应地选取了正负对称的Sigmoid函数[8]ꎮ01第4期李小峰ꎬ等:基于BP神经网络的船舶航向智能PID控制研究图3㊀BP神经网络单元组成结构图Fig.3㊀StructurediagramofBPneuralnetworkunit由BP神经网络单元组成结构图可知ꎬ输入层为:Oj=Xjꎬj=1ꎬ2ꎬ3ꎬ ꎬMꎬ其中ꎬOj为输入层第j个节点的输出ꎬ输入节点的数量M取决于被控系统的复杂程度ꎮ网络隐含层的输入输出为:φi(2)(k)=ðMj=1ωij(2)Oj(1)(k)-θi(2)ꎬOi(2)(k)=f(φi(2)(k))ꎬi=1ꎬ2ꎬ3ꎬ ꎬNìîíïïïï(6)式中ꎬφ(k)为神经网络某一层的输入函数ꎻ上标(1)ꎬ(2)ꎬ(3)分别代表神经网络的输入层㊁隐含层及输出层ꎻωij(2)为神经网络隐含层加权系数ꎬθi(2)为神经网络隐含层神经元阈值函数ꎻfx[]为神经网络隐含层神经元激活函数ꎬ如前所述取正负对称的Sigmoid函数ꎮ即:fx[]=tanh(x)=(ex-e-x)/(ex+e-x)ꎮ(7)BP神经网络输出层的输入输出为:φl(3)(k)=ðQi=1(ωli(3)Oi(2)(k)-θ(3)j)ꎬOl(3)(k)=gφl(3)(k)()ꎬl=1ꎬ2ꎬ3ꎬìîíïïïï(8)其中ꎬO1(k)=KpꎬO2(k)=KiꎬO3(k)=Kdꎻθ(3)j为神经网络输出层神经元阈值函数ꎻgx[]为神经网络输出层神经元激活函数ꎬ如前所述ꎬ激活函数选用非负的Sigmoid函数ꎮ即:gx[]=121+tanh(x)[]=ex/(ex+e-x)ꎮ(9)BP神经网络的性能指标函数则设计选取为:E(k)=12rin(k)-yout(k)()2ꎬ(10)其中ꎬrin(k)为期望输出ꎬyout(k)为实际输出ꎮ为能够快速获得自学习结果ꎬ设计采用梯度下降法来修正BP神经网络的加权系数ꎮ将E(k)对加权系数的负梯度方向设定为该法的搜索方向ꎬ考虑到该方法越接近目标值ꎬ步长越小ꎬ收敛速度越慢ꎬ故设置一个使搜索快速收敛的全局极小的常数阈值ꎬ则有:Δωli(3)(k+1)=-η∂E(k)∂ωli(3)+αΔωli(3)(k)ꎬ(11)11山㊀东㊀科㊀学㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2018年其中ꎬη为学习速率ꎬη>0ꎬα为惯性系数ꎬ其通常取值范围在0~1之间[9]ꎮ∂E(k)∂ωli(3)=∂E(k)∂y(k) ∂y(k)∂u(k) ∂u(k)∂Ol(3)(k) ∂Ol(3)(k)∂φl(3)(k) ∂φl(3)(k)∂ωli(3)(k)ꎮ(12)其中∂E(k)∂y(k)=e(k)ꎻ∂y(k)∂u(k)为未知项ꎬ用符号函数sign[∂y(k)∂u(k)]进行近似代替ꎬ由此通过调整学习速率η补偿对计算的影响ꎻ∂u(k)∂Ol(3)(k)由增量式PID控制算法可知:∂u(k)∂O1(3)(k)=e(k)-e(k-1)ꎬ∂u(k)∂O2(3)(k)=e(k)ꎬ∂u(k)∂O3(3)(k)=e(k)-2e(k-1)+e(k-2)ꎮìîíïïïïïïïï(13)∂Ol(3)(k)∂φl(3)(k)=g'(φl(3)(k))ꎮ(14)∂φl(3)(k)∂ωli(3)(k)=Oi(2)(k)ꎮ(15)由以上各式可推导BP神经网络输出层的加权系数计算公式为:Δω(3)li(k)=ηδ(3)lO(2)i(k)+αΔω(3)li(k-1)ꎬδ(3)l=e(k) sign∂y(k)∂Δu(k)éëêêùûúú ∂Δu(k)∂O(3)l(k) g'φ(3)l(k)()ꎮìîíïïïï(16)BP神经网络隐含层加权系数的计算公式可参考前述输出层的推导过程ꎬ进行推算可得:Δω(2)ij(k)=ηδ(2)iO(1)j(k)+αΔω(2)ij(k-1)ꎬδ(2)i=f'φ(2)i(k)()ð3l=1δ(3)lω(3)li(k)ꎬi=1ꎬ2ꎬ3ꎬ ꎬNꎮìîíïïïï(17)4㊀仿真实验本次仿真以粤海铁三号轮渡为研究对象ꎬ将该船尺度参数作为仿真输入ꎬ其具体参数为船长188mꎬ船宽22.6mꎬ仿真航速设置为经济航速17nmile/hꎬ额定载重量为6500tꎬ将根据上述参数进行控制器的设计与仿真ꎮ经计算得惯性力矩系数T=122.05ꎬ阻尼力矩系数K=0.0549ꎮ结合前面章节描述的船舶运动模型ꎬ该船模型舵角δɤ35ʎꎬ舵速̇rɤ3ʎ/sꎬ建立船舶航向控制Simulink仿真模型框图如图4所示[10]ꎮ设定初始航向为0ʎꎬ期望航向为30ʎꎬ仿真时间长度为300sꎬ并在100s时添加干扰y=2ˑrand(1)-1ꎬ用于模拟海面风的影响ꎮ仿真结果如图5所示ꎬKp㊁Ki㊁Kd的变化趋势如图6所示ꎮ从图中可以看出ꎬ基于BP神经网络的PID控制器可以实现舵的实时控制ꎬ使船舶航向角跟踪上给定值ꎬ只要预定航向角实时航向角存在误差ꎬ舵机就能不断工作ꎬ直至误差为零ꎬ此时舵角归零ꎮ航向角在约100s时有外界干扰介入ꎬ舵角一开始迅速下降ꎬ之后迅速上升ꎬ最后舵角误差归零ꎬ船舶达到预定航向角ꎮ系统的超调很小ꎬ鲁棒性好ꎬ可以长时间稳定工作ꎬ稳态误差可控ꎮ从仿真结果看ꎬ与周蓉[3]㊁霍星星等[8]㊁彭秀艳等[9]在该领域进行实验取得的相关仿真结果一致ꎬ表明该方法应用到实船工程设计中后ꎬ可以有效减少船舶舵机的损耗ꎮ21第4期李小峰ꎬ等:基于BP神经网络的船舶航向智能PID控制研究图4㊀船舶航向控制系统仿真框图[10]Fig.4㊀Simulationdiagramofshipcoursecontrolsystem[10]图5㊀航向变化图Fig.5㊀Vesselheadingcurve图6㊀KpꎬKiꎬKd变化图Fig.6㊀KpꎬKiꎬKdcurve3141山㊀东㊀科㊀学㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2018年5㊀结语本文针对船舶航向运动特性建立了基于一阶KT模型的船舶航向控制系统模型ꎬ根据航向控制系统特性给出基于BP神经网络的PID控制参数的训练获取方法ꎮ控制系统设计完成后ꎬ根据真实渡轮船舶特征参数ꎬ利用MATLAB/Simulink仿真软件建立船舶航向运动控制系统模型并进行航向控制仿真模拟运算ꎮ仿真结果表明ꎬ基于BP神经网络的PID航向控制系统具有自学习能力ꎬ超调小㊁鲁棒性好ꎬ控制系统可长时间稳定工作ꎬ几乎无稳态误差ꎮ仿真结果显示设计的船舶航向控制系统实现了对船舶航向的有效控制ꎬ证明基于BP神经网络的PID控制算法对船舶航向控制的有效性ꎮ由于BP神经网络自学习速度不够迅速ꎬ收敛速度还需要调整ꎬ虽然仿真结构较为理想ꎬ但在仿真时没有考虑加入海浪对控制的影响ꎬ这与实际航向环境也有较大差距ꎬ需在今后进一步地加以研究ꎮ目前此项工作还处在仿真实验阶段ꎬ并未真正应用于船舶舵机设备ꎬ随着算法研究的不断深入和提高ꎬ以及神经网络方法的日趋完善ꎬ该设计方法将能够通过硬件设计应用于船舶自动舵设备中ꎬ未来将具有广阔的应用前景ꎮ参考文献:[1]冯嘉仪ꎬ刘教瑜ꎬ黄珍.船舶航向控制器设计与仿真[J].工业控制计算机ꎬ2015ꎬ28(6):64 ̄66.[2]边信黔ꎬ付明玉ꎬ王元慧.船舶动力定位[M].北京:科学出版社ꎬ2011.[3]周蓉.船舶航向自适应PID控制器的设计与应用[D].大连:大连海事大学ꎬ2012.[4]林海波ꎬ王晓曦ꎬ刘奭昕.一种基于增量式数字PID算法的智能温度控制器[J].长春工程学院学报(自然科学版)ꎬ2011ꎬ12(3):86 ̄89.[5]詹月林.基于BP神经网络的PID参数自整定的船舶操纵控制器研究[J].舰船科学技术ꎬ2003ꎬ25(5):20 ̄23[6]柳晨光ꎬ初秀民ꎬ谢朔等.船舶智能化研究现状与展望[J].船舶工程:智能船舶ꎬ2016ꎬ38(3):77 ̄84.[7]王敬志ꎬ任开春ꎬ胡斌.基于BP神经网络整定的PID控制[J].工业控制计算机ꎬ2011ꎬ24(3):72 ̄73.[8]霍星星ꎬ余婷ꎬ孙帅.基于BP神经网络的PID船舶自动舵[J].中国水运ꎬ2013ꎬ13(12):165 ̄167.[9]彭秀艳ꎬ张文颖ꎬ贾书丽.基于BP算法的船舶航向模糊PID控制研究[J].控制工程ꎬ2013ꎬ20(4):623 ̄626[10]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社ꎬ2016.。
基于BP神经网络技术开发港口设备故障诊断专家系统摘要:针对港口设备故障诊断的复杂性,提出了将BP神经网络技术引入设备故障诊断专家系统的思想,并对基于神经网络的专家系统的原理进行探讨。
给出了一基于三层BP网的设备故障诊断专家系统的诊断过程。
关键词:神经网络;专家系统;故障诊断0 引言在港口生产作业中,保证设备的完好率和故障及时解决是非常重要的;在设备发生故障后,能第一时间诊断故障类别将加速故障排除,为生产作业争取作业时间,保证了船舶的及时装卸。
由于设备故障现象的多样性和复杂性,通过线形分析是无法确定的,我们引进BP神经网络技术设计开发一套故障诊断专家系统。
1 BP神经网络技术原理1.1 BP神经网络概述BP神经网络(Back Propagation Neural Network)是一种按误差逆向传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一,通过学习和存贮大量的输入——输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。
它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小包括输入层(input)、隐层(hide layer)和输出层(output layer)。
1.2 BP神经网络模型及算法输入层T1、T2....Tn,通过相互之间联系,计算出各自的系数值,在输出层中,在已知H1、H2......Hi-1值,通过算出的系数值,预测出Hi-Hn值。
BP神经网络诊断系统算法:在正向计算进程中, 输入信息从输入层经过隐层逐层处理, 传向输出层。
每一层神经状态只影响下一层神经状态。
BP神经网络主要用于模式识别、系统辨识、图像处理等。
1.3 运用MATLAB进行训练和预测MATLAB神经网络工具箱中包含了许多用于BP神经网络分析与设计的函数,通过MATLAB运行模拟BP算法,首先设置BP神经网络,然后利用已知的样本对网络进行训练,最后就可以利用训练好的BP神经网络对未知的样本进行预测。
基于BP神经网络的船舶管系CAPP研究
郭敬;薛开;钟宇光;杨继志
【期刊名称】《应用科技》
【年(卷),期】2004(031)008
【摘要】介绍了一种新的舰船管系柔性编码方法和加工工艺推理方法.即利用成组技术原理,编制舰船管系特征码和加工码,并利用BP神经网络进行加工工艺推理,在总结BP神经网络推理方法的基础上,给出了利用BP神经网络开发船舶管系CAPP 的方法,并论述这种方法的优点.这种推理方法极大地提高了船舶管系CAPP系统的柔性,开发了一种应用于不同厂家的CAPP系统.
【总页数】3页(P8-10)
【作者】郭敬;薛开;钟宇光;杨继志
【作者单位】哈尔滨工程大学,机电工程学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,机电工程学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,机电工程学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,机电工程学院,黑龙江,哈尔滨,150001
【正文语种】中文
【中图分类】TP31
【相关文献】
1.基于知识库的船舶管系定额工时测算研究 [J], 潘燕华;树健;史恭波
2.基于SIPM/CAPP的CAPP技术应用研究 [J], 徐立平;沈荣辉;伍丽峰;卢海燕
3.基于CAPPFramework的CAPP专家系统研究与实践 [J], 贾晓亮;许建新;张振
明;孔宪光;朱名铨
4.基于TRIBON船舶管系加工工费测算方法的研究 [J], 葛世伦;袁友泽
5.基于超声波流量计调试船舶管系流量的技术研究 [J], 李传来; 陈志农; 冯帅; 石磊因版权原因,仅展示原文概要,查看原文内容请购买。
BP神经网络和卡尔曼滤波相结合的船舶运动跟踪
朱广华
【期刊名称】《舰船科学技术》
【年(卷),期】2016(0)10X
【摘要】在海洋运输中,船舶是重要的物资运送平台。
船舶运动跟踪作为优化海洋交通环境的前提之一,正受到越来越多的研究。
由于海洋情况越来越复杂,沿海运输船舶数量增多,导致传统的船舶跟踪方法不再适用,急需一种高性能的船舶运动跟踪方法。
本文正是基于这项需求,开发出BP神经网络和卡尔曼滤波相结合的船舶运动跟踪算法,并对其进行仿真验证。
此方法具有速度快、噪声抑制能力强和自动化程度高的特点。
从仿真结果看,本方法的性能优越,易于推广使用。
【总页数】3页(P82-84)
【关键词】噪声抑制;预测;自适应网络;滤波算法
【作者】朱广华
【作者单位】南通大学研究生院
【正文语种】中文
【中图分类】U675.6
【相关文献】
1.无迹卡尔曼滤波和扩展卡尔曼滤波辨识船舶运动模型的性能比较 [J], 蔡安新;朱坤;唐风文
2.S—修正的自适应卡尔曼滤波与模糊卡尔曼滤波相结合的汽车状态估计算法 [J],
黄超;林棻
3.BP神经网络在线优化卡尔曼滤波算法在钒电池SOC估算中的应用 [J], 曹弘飞;朱新坚
4.基于BP神经网络补偿卡尔曼滤波的UWB精定位算法 [J], 陈皓; 何杰; 马凯; 黄琴
5.基于惯性卡尔曼滤波的户外运动跟踪定位模型 [J], 修艳
因版权原因,仅展示原文概要,查看原文内容请购买。