2YZS烟草移栽机移栽装置的设计
- 格式:pdf
- 大小:256.99 KB
- 文档页数:4
双排移栽机械手联动式高速移栽装置设计与试验双排移栽机械手联动式高速移栽装置设计与试验摘要:双排移栽机械手联动式高速移栽装置是一种在高速生产线上用于快速移栽物料的设备。
这篇论文将介绍该装置的设计构成与工作原理,并对其进行试验验证与优化改良。
关键词:双排移栽机械手;高速移栽装置;联动式设计;试验验证;优化改良。
一、引言双排移栽机械手联动式高速移栽装置是一种应用于生产线上的机器人设备,其主要任务是在物料生产到一定程度时,快速将物料从生产线传送到下一个加工位置。
该设备主要应用于食品、医药、化工等行业的生产线上,能够有效提高生产效率和减少人力成本。
近年来,随着科技的不断发展,机械手的应用越来越广泛,机械手的使用不仅提高了生产效率,降低了生产成本,同时还能有效缓解劳动力短缺和人工成本的问题,因此,机械手设备的研究和应用具有广泛的前景。
本文将主要介绍双排移栽机械手联动式高速移栽装置的构成和工作原理,并通过试验验证和优化改良,为机械手应用提供参考。
二、设计构成双排移栽机械手联动式高速移栽装置主要由下面五部分组成:1.机械手系统:机械手系统包含机械臂、末端执行器和控制器等组件。
机械臂通过控制器控制,可以完成空间中的精确取放操作,末端执行器则用于实现机械手在取放物料时的夹持和释放动作。
2.物料传送系统:物料传送系统由传送带和传送带驱动器组成,主要负责将物品送到机械手夹持的位置。
3.光电感应系统:光电感应系统主要由光电开关和光电传感器组成,可以精确地检测传送带上物料的位置和数量。
4.运动控制系统:运动控制系统是通过PLC控制器和伺服电机实现对机械手的运动控制的。
5.人机界面系统:人机界面系统主要用于显示机器状态,以及实现人机交互功能,使得机器人的操作更加便捷。
三、工作原理双排移栽机械手联动式高速移栽装置的工作原理如下:首先,物料进入机器人的工作范围,通过光电感应系统检测物料位置及数量,传送带驱动器将物料送到机械手夹持位置,接着,机械手对物料进行夹持,然后将物料从传送带上拾取,根据指令,机械手将物料从原始位置移动到目标位置,将物料释放。
移苗装置的设计目 录摘 要 (1)第一章概述 (3)1.1 现代农业知识 (3)1.1.1 现代农业的定义 (3)1.1.2 现代农业的内容 (3)1.1.3 现代农业的特征 (3)1.1.4 我国现代农业发展现状 (4)1.1.5 发展现代农业应注意事项 (5)1.2 移苗装置 (6)1.2.1 概述 (6)1.2.2 移苗装置的应用情况 (6)1.2.3 移苗装置的发展趋势 (6)第二章设计任务书 (7)2.1 设计题目 (7)2.2 设计背景 (7)2.2.1 题目简述 (7)2.2.2 使用状况 (7)2.2.3 生产状况 (7)2.3 设计参数 (7)2.4 设计任务 (7)第三章移苗装置的总体设计方案 (8)3.1 移苗机的工作原理 (8)3.2 传动装置的总体设计方案 (9)3.2.1 移苗装置水平状态设置 (10)3.2.2 进出苗设计方案 (11)第四章轴和轴承的应力校核 (13)4.1 主动轮轴的设计 (13)4.1.1 最小直径 (13)4.1.2 轴上各零件的布置方案 (13)4.1.3 轴的强度校核 (14)4.2 从动轮轴的设计 (16)4.2.1 最小直径 (16)4.2.2 轴上各零件的布置方案 (16)4.2.3 轴的强度校核 (17)4.3 轴承的使用寿命校核 (20)4.3.1 主动轮轴轴承的寿命校核 (20)4.3.2 从动轮轴轴承的寿命校核 (20)第五章 总结 (21)参考文献 (22)致谢 (23)摘 要我国是一个农业大国,农业是国民经济的基础。
新中国成立以来,我国农业 机械化有较大发展,农业生产方式正由人畜力手工劳动向机械化生产不断改变。
随着农机装备数量的增加和结构的进一步优化,农机作业量大幅度增加,农业机 械化水平有了很大提高, 先进的机械化生产方式正在替代落后的传统手工生产方 式。
而且我国的农业机械已在种植业的主要生产环节中得到应用,农业生产方式 已从传统农业向现代农业逐步转变, 总体上机械作业在农业生产中开始居主导地 位。
移苗装置的设计作者姓名专业指导教师姓名专业技术职务目录摘要 (1)第一章概述 (3)1.1现代农业知识 (3)1.1.1现代农业的定义 (3)1.1.2现代农业的内容 (3)1.1.3现代农业的特征 (3)1.1.4我国现代农业发展现状 (4)1.1.5发展现代农业应注意事项 (5)1.2移苗装置 (6)1.2.1概述 (6)1.2.2移苗装置的应用情况 (6)1.2.3移苗装置的发展趋势 (6)第二章设计任务书 (7)2.1设计题目 (7)2.2设计背景 (7)2.2.1题目简述 (7)2.2.2使用状况 (7)2.2.3生产状况 (7)2.3 设计参数 (7)2.4 设计任务 (7)第三章移苗装置的总体设计方案 (8)3.1移苗机的工作原理 (8)3.2 传动装置的总体设计方案 (9)3.2.1移苗装置水平状态设置 (10)3.2.2进出苗设计方案 (11)第四章轴和轴承的应力校核 (13)4.1 主动轮轴的设计 (13)4.1.1最小直径 (13)4.1.2 轴上各零件的布置方案 (13)4.1.3 轴的强度校核 (14)4.2 从动轮轴的设计 (16)4.2.1最小直径 (16)4.2.2 轴上各零件的布置方案 (16)4.2.3 轴的强度校核 (17)4.3 轴承的使用寿命校核 (20)4.3.1 主动轮轴轴承的寿命校核 (20)4.3.2 从动轮轴轴承的寿命校核 (20)第五章总结 (21)参考文献 (22)致谢 (23)摘要我国是一个农业大国,农业是国民经济的基础。
新中国成立以来,我国农业机械化有较大发展,农业生产方式正由人畜力手工劳动向机械化生产不断改变。
随着农机装备数量的增加和结构的进一步优化,农机作业量大幅度增加,农业机械化水平有了很大提高,先进的机械化生产方式正在替代落后的传统手工生产方式。
而且我国的农业机械已在种植业的主要生产环节中得到应用,农业生产方式已从传统农业向现代农业逐步转变,总体上机械作业在农业生产中开始居主导地位。
![烟草移栽机.ppt [自动保存的]](https://uimg.taocdn.com/c00e132eaf45b307e8719773.webp)
烟草移栽机送苗机构以及试验装置的研究/h11.1课题研究的目的与意义中国是世界上最大的烟叶生产国,约占世界总产量的30%多,但烟草生产机械化水平很低,随着国民经济的发展,农民工进城务工增多,使得大量的农田被相对集中起来,大大提高了人均种烟面积,烟农们通过扩大种植规模增加可能的收入,所以执行机械化移栽自然地成为了我国烟草种植发展过程中迫切需要解决的问题。
积极推动烟草移栽机械化的发展不仅是要解放劳动力,也是为了提高烟草种植的生产效率,更是我们向集约型经济模式发展的重要一步,进行全面地、深入地烟草移栽技术机械化的研究将是中国乃至世界农业发展的重点,现今烟草移栽机设备在市场上己较为常见,但更多的是半自动的烟草移栽机,由于各方面的原因使得实现完全机械化烟草移栽的进程相当缓慢,目前广泛使用的这些半自动移栽机都是依靠人工喂苗,一般以单行人工投苗为主,一般单人投苗速度为40?50株/min,最快可以达到60株/min ⑷,但是劳动强度比较大,移栽速度受到限制,工作效率低。
为了实现移栽机全自动化,达到降低劳动强度、提高移栽效率的目的,解决送苗问题就成为了当务之急。
目前广泛使用的半自动移栽机完成的工作仅仅是将幼苗种植到旱地而已,近些年来,也有不少的自动取苗机构出现但是由于一些技术难题,为这些半自动移栽机配置自动取苗及送苗机构的相关研究偏少。
如果能将半自动移栽机升级为全自动移载机,将大大提高烟草自动移载的工作效率,降低劳动强度,节约劳动力,提高移栽效率。
目前,国内出现了一些旋转式的取苗机构,但只能实现定点取苗,所以设计一种能适应旋转式取苗机构的送苗机构是关键环节。
针对该问题本论文提出的烟草移栽机自动送苗机构及其试验装置的研究,目的是为了实现集自动送苗、取苗及栽植为一体的全自动移栽技术,对推动全自动烟草移栽机技术的发展有一定的作用。
1.2国内外研究现状在20世纪初,一些欧洲国家大面积种植蔬菜等经济作物,开发出一些早期的作物移栽设备。
烟草移栽施肥机的设计与试验研究
滑宏林
【期刊名称】《农村科学实验》
【年(卷),期】2017(000)009
【摘要】在社会不断发展过程中,烟草生产行业也开始向集约化转变,而现代化烟草行业要想得到较为有效的发展就一定要尽快的实现烟草生产现代化,这样才能进一步促进烟草行业的健康发展,烟草移栽施肥作为烟草生产环节中较为重要的一项工作,只有其真正实现了作业的机械化才能有效的加快现代化烟草行业的发展,为此,本文也就烟草移栽施肥机的设计与试验进行研究.
【总页数】1页(P72)
【作者】滑宏林
【作者单位】平陆县优质烟开发服务中心,山西运城 044000
【正文语种】中文
【相关文献】
1.2ZY-1型烟草移栽机移栽立苗试验研究
2.石城县多功能烟草作物打穴施肥机的应用推广试验研究
3.2 YZS 烟草移栽机移栽装置的设计
4.一种自走式烟草移栽机的试验研究
5.烟草打窝施肥机打窝轮设计及其有限元分析
因版权原因,仅展示原文概要,查看原文内容请购买。
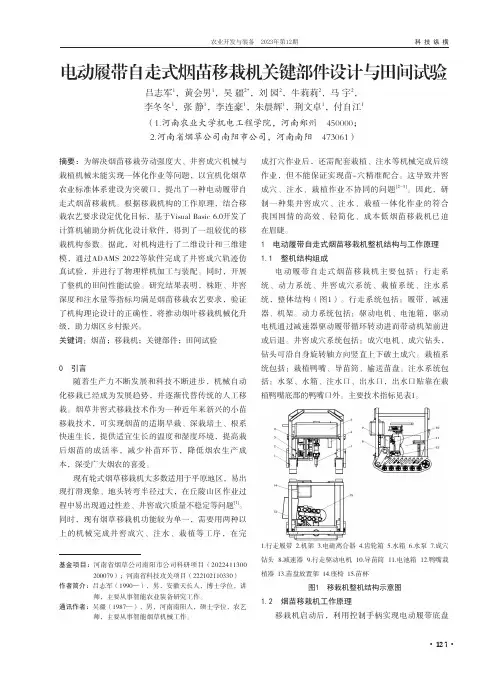
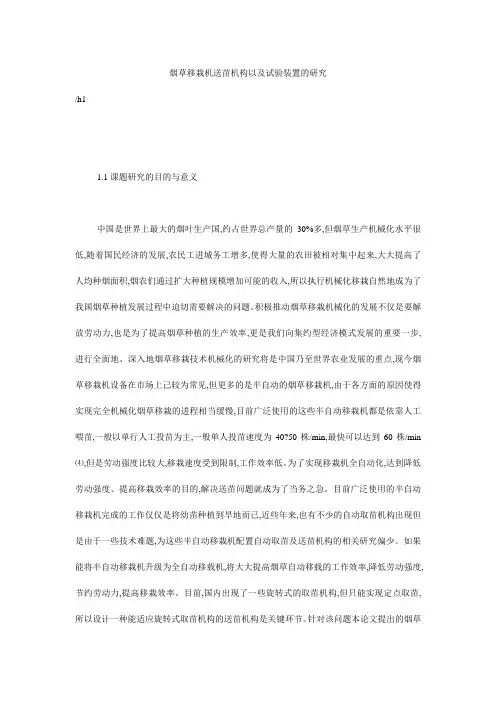
电动履带自走式烟苗移栽机关键部件设计与田间试验吕志军1,黄会男1,吴 疆2*,刘 园2,牛莉莉2,马 宇2,李冬冬1,张 静1,李连豪1,朱晨辉1,荆文卓1,付自江1(1.河南农业大学机电工程学院,河南郑州 450000; 2.河南省烟草公司南阳市公司,河南南阳 473061)摘要:为解决烟苗移栽劳动强度大、井窖成穴机械与栽植机械未能实现一体化作业等问题,以宜机化烟草农业标准体系建设为突破口,提出了一种电动履带自走式烟苗移栽机。
根据移栽机构的工作原理,结合移栽农艺要求设定优化目标,基于Visual Basic 6.0开发了计算机辅助分析优化设计软件,得到了一组较优的移栽机构参数。
据此,对机构进行了二维设计和三维建模,通过ADAMS 2022等软件完成了井窖成穴轨迹仿真试验,并进行了物理样机加工与装配。
同时,开展了整机的田间性能试验。
研究结果表明,株距、井窖深度和注水量等指标均满足烟苗移栽农艺要求,验证了机构理论设计的正确性,将推动烟叶移栽机械化升级,助力烟区乡村振兴。
关键词:烟苗;移栽机;关键部件;田间试验0 引言随着生产力不断发展和科技不断进步,机械自动化移栽已经成为发展趋势,并逐渐代替传统的人工移栽。
烟草井窖式移栽技术作为一种近年来新兴的小苗移栽技术,可实现烟苗的适期早栽、深栽培土、根系快速生长,提供适宜生长的温度和湿度环境,提高栽后烟苗的成活率,减少补苗环节,降低烟农生产成本,深受广大烟农的喜爱。
现有轮式烟草移栽机大多数适用于平原地区,易出现打滑现象、地头转弯半径过大,在丘陵山区作业过程中易出现通过性差、井窖成穴质量不稳定等问题[1]。
同时,现有烟草移栽机功能较为单一,需要用两种以上的机械完成井窖成穴、注水、栽植等工序,在完成打穴作业后,还需配套栽植、注水等机械完成后续作业,但不能保证实现苗-穴精准配合。
这导致井窖成穴、注水、栽植作业不协同的问题[2-3]。
因此,研制一种集井窖成穴、注水、栽植一体化作业的符合我国国情的高效、轻简化、成本低烟苗移栽机已迫 在眉睫。
石河子大学机械电气工程学院毕业设计开题报告课题名称:移栽机自动取苗装置的设计研究学生姓名:***学号:**********学院:机械电气工程学院专业、年级: 07机制(3)班指导教师:**职称:副教授毕业论文起止时间:2011-3至2011-6栽植机械出现。
但总体来讲,目前我国研制使用的栽植机械仍处于起步阶段,以半自动为主。
目前,国内正在加紧移栽机的研制工作,主要有:黑龙江省白桦耕作机厂研制2YZ一2,2YZ一4和2YZ一6移栽机;苏州金果实农业技术装备有限公司生产的多功能移栽机和2ZM一1型秧苗栽植铺膜机;内蒙古农业大学机械厂研制的2ZT一2型甜菜移栽机;北京京鹏有限公司生产的PCI0移栽机;辽宁省鞍山市农业机械厂与中国农业机械化科学研究院合作进行研制的国家“九五”科技攻关项目一玉米、蔬菜移栽机等[]3。
2自动取苗装置的发展现状目前移栽机自动取苗装置的研究还较少,本人通过大量文献收集概括有以下几种,从实现机构分为机械式和气吸式,从取苗类型分为机械夹苗取苗式、机械夹土取苗式和气吸气吹自动排苗式。
下面从典型的四杆机构型、机械臂型、移栽抓型、顶杆式和气吸式简要说明各自特点。
2.1 四杆机构型采用平面四连杆机构来实现取苗动作( 图2.11) , 其原理为: 随着曲柄AB 绕A 点的转动, 固定在四连杆机构上的苗指插入苗钵中将苗取出, 当苗运到导苗管口上方时, 由固定在机组上的排苗杆EF 将苗拨下, 使苗脱离苗指, 进入导苗管, 完成取苗过程。
在自动取苗机构中, 苗指端点的运动轨迹取决于四连杆机构中4 个连杆的长度及其连接点的位置[ 2] , 它们的组合有无穷多种。
在进行多次试验后, 选取合适的连杆长度和连接点的位置, 可得到苗指端点的运动轨迹, 如图2.12 所示。
这种曲线的特点是: 形状狭长, 一边近似为直线,另一边为曲率半径较大的圆弧, 苗指的这种运动轨迹有利于平稳取苗[]4。
图2.11 四连杆自动取苗机构图2.12 苗指端点的运动轨迹2.2 机械臂型随着工业机器人技术的日益成熟和广泛应用,该技术在农业中的应用越来越广泛, 它的应用将极大提高农业生产率和自动化程度。