TDOA定位算法研究
- 格式:docx
- 大小:651.19 KB
- 文档页数:72
时间到达差算法
时间到达差算法(TDOA)是一种通过比较信号到达时间差来计算距离的方法。
该算法的基本原理是利用多个信号源同时发送信号,通过测量不同信号源信号到达时间差,结合已知信号传播速度,计算出目标点的位置。
TDOA算法具有较高的定位精度和抗干扰能力,因此在许多领域都有广泛的应用,如无线通信、声呐、地震学和卫星导航等。
在无线通信领域中,TDOA算法常用于移动终端定位、无线传感器网络定位和室内定位等场景。
TDOA算法的实现需要精确的时间同步,因为不同信号源信号到达时间差的测量精度直接影响到最终定位精度。
同时,TDOA算法还需要根据实际情况选择合适的信号源数量和分布方式,以及优化算法参数等。
总的来说,时间到达差算法是一种可靠的定位技术,具有广泛的应用前景和重要的研究价值。
如需更多信息,建议阅读TDOA算法相关论文或科普类文章。
Technology Study技术研究DCW5数字通信世界2020.070 引言无线定位技术一直是通信领域的一个研究重点,常见的定位技术有TOA 、TDOA 、AOA 以及基于智能天线阵列的定位技术等。
其中,TDOA 定位技术以定位精度高、系统复杂度低等优点在很多监测系统中被采用。
TDOA 定位的核心算法之一就是计算时间差,常用的计算时间差的方法多以硬件为主,利用高精度的GPS 时钟模块对同步采样的数据进行互相关计算[1]。
该方案硬件成本高,定位结果容易受到GPS 信号的强弱以及晶振的稳定性等影响。
所以,本文研究了基于参考信号计算时间差的算法,采用该方式的定位可有效降低硬件设计的成本与难度。
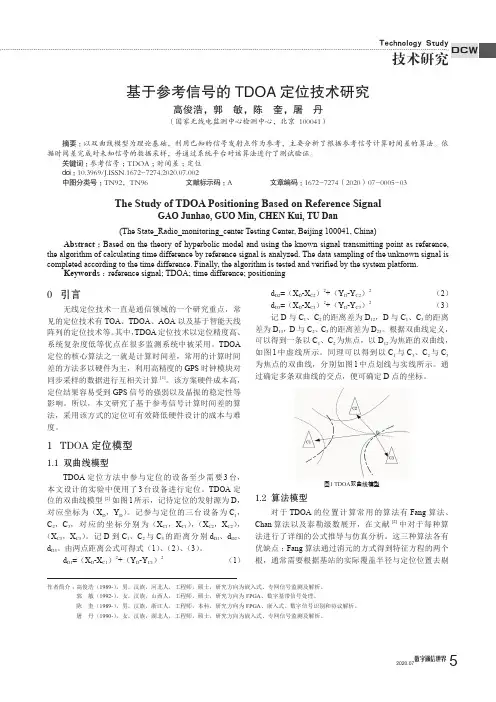
1 TDOA 定位模型1.1 双曲线模型TDOA 定位方法中参与定位的设备至少需要3台,本文设计的实验中使用了3台设备进行定位。
TDOA 定位的双曲线模型[2]如图1所示,记待定位的发射源为D ,对应坐标为(X D ,Y D )。
记参与定位的三台设备为C 1,C 2,C 3,对应的坐标分别为(X C1,X C1),(X C2,X C2),(X C3,X C3)。
记D 到C 1、C 2与C 3的距离分别d D1、d D2、d D3。
由两点距离公式可得式(1)、(2)、(3)。
d D1= (X D -X C1)2+(Y D -Y C1)2(1)d D2=(X D -X C2)2+(Y D -Y C2)2 (2)d D3=(X D -X C3)2+(Y D -Y C3)2 (3)记D 与C 1、C 2的距离差为D 12,D 与C 1、C 3的距离差为D 13,D 与C 2、C 3的距离差为D 23。
根据双曲线定义,可以得到一条以C 1、C 2为焦点,以D 12为焦距的双曲线,如图1中虚线所示。
同理可以得到以C 1与C 3、C 2与C 3为焦点的双曲线,分别如图1中点划线与实线所示。
通过确定多条双曲线的交点,便可确定D点的坐标。
tdoa三维定位中泰勒算法代码引言在无线通信和定位领域,tdoa(Time Difference of Arrival)三维定位技术被广泛应用。
该技术通过测量信号到达不同接收器的时间差来确定发送信号源的位置。
其中,泰勒算法是一种经典的tdoa三维定位算法,可以通过精确的数学计算来实现高精度的定位结果。
原理介绍时间差测量在tdoa三维定位中,首先需要测量不同接收器接收到信号的时间差。
这可以通过一种双步骤方法来实现。
首先,在接收到信号后,立即记录接收时间,并将其与发送信号的时间戳进行比较,从而获得到达时间差。
然后,通过测量接收到信号的到达时间差来计算距离差。
基于泰勒级数展开的定位算法泰勒算法利用了泰勒级数展开的原理来估计发送信号源的位置。
该算法基于以下假设: - 发送信号源位于三维坐标系的某个位置,用(x,y,z)表示。
- 接收到信号的时间差能够准确测量。
根据这些假设,泰勒算法基于以下原理进行定位计算: 1. 将未知发送源位置进行泰勒展开,展开到一阶近似。
2. 利用接收器测量到的时间差将泰勒展开式中的高阶项消除,只保留一阶项。
3. 在一阶近似的基础上,求解方程组来计算发送源的位置。
泰勒算法代码实现以下是使用Python编写的泰勒算法代码示例:import numpy as npdef taylor_algorithm(time_diffs, receiver_positions):# 初始化发送信号源位置的初始估计estimated_position = np.array([0, 0, 0])# 最大迭代次数和收敛阈值max_iterations = 10convergence_threshold = 0.001for i in range(max_iterations):# 计算当前估计位置的梯度gradients = []for j in range(len(time_diffs)):gradient = (estimated_position - receiver_positions[j]) / time_dif fs[j]gradients.append(gradient)# 计算梯度平均值mean_gradient = np.mean(gradients, axis=0)# 更新位置估计new_position = estimated_position - mean_gradient# 判断是否满足收敛条件if np.linalg.norm(new_position - estimated_position) < convergence_thr eshold:breakestimated_position = new_positionreturn estimated_position# 示例输入数据time_diffs = [1.2, 2.0, 3.5]receiver_positions = [np.array([1, 2, 3]), np.array([4, 5, 6]), np.array([7, 8, 9])]# 调用泰勒算法函数进行定位estimated_position = taylor_algorithm(time_diffs, receiver_positions)print("Estimated position:", estimated_position)性能分析与优化泰勒算法在tdoa三维定位中具有一定的计算复杂度。
声源定位的算法原理声源定位算法是通过分析和处理音频信号,确定声源的位置或方向。
常见的声源定位算法包括交叉相关法、泛音法、多麦克风阵列法等。
下面将详细介绍这些算法的原理。
1.交叉相关法:交叉相关法是一种经典的声源定位算法。
它基于两个麦克风之间的时间差(Time Difference of Arrival,简称TDOA)来确定声源的位置。
首先,通过两个麦克风接收到的声音信号计算出它们的自相关函数。
然后,两个自相关函数进行互相关运算,得到互相关函数。
根据互相关函数的峰值位置,可以通过时间差来确定声源的方向。
具体步骤如下:-麦克风接收到的声音信号进行滤波和采样。
-计算出两个麦克风的自相关函数。
-对两个自相关函数进行互相关运算,得到互相关函数。
-找到互相关函数的峰值位置,根据时间差计算声源的方向。
2.泛音法:泛音法是一种利用声音的频率特征来确定声源方向的算法。
声音在传播过程中会发生多次反射,形成泛音。
这些泛音在不同位置的麦克风上的相对振幅会发生变化。
通过分析不同麦克风上的频率响应,可以确定声源的位置。
具体步骤如下:-通过多个麦克风接收到的声音信号计算频谱。
-分析不同麦克风上的频谱,在频域上找到波峰位置。
3.多麦克风阵列法:多麦克风阵列法是一种基于信号处理技术的声源定位算法。
它利用多个麦克风接收到的声音信号之间的差异来确定声源的方位。
通过利用阵列中的多个麦克风之间的时延差、振幅差和相位差等信息,可以实现高精度的声源定位。
-设置一个具有多个麦克风的阵列。
-同时接收到来自不同麦克风的声音信号,并利用信号处理技术进行预处理。
-通过计算麦克风之间的时延差、振幅差和相位差等信息,确定声源的位置。
声源定位算法在很多领域都有广泛的应用,如语音识别、视频会议、智能家居等。
通过对声音信号的分析和处理,可以准确地确定声源的位置和方位,为人们提供更多便利和服务。
tdoa定位方程TDOA定位方程引言在现代定位技术中,TDOA(Time Difference of Arrival)定位是一种常用的方法。
它利用接收到信号的到达时间差来确定目标的位置。
本文将介绍TDOA定位方程的基本原理和应用领域。
一、TDOA定位原理TDOA定位原理是基于信号的传播速度恒定这一基本假设。
当一个信号源发出信号后,信号以固定的速度在空间中传播。
如果在不同位置接收到该信号,由于传播时间不同,可以计算出信号到达各个接收器的时间差。
通过测量这些时间差,可以推算出信号源的位置。
二、TDOA定位方程TDOA定位方程是用来计算目标位置的数学表达式。
假设有N个接收器,每个接收器的位置为(xi, yi),目标位置为(x, y),接收到信号的时间差为τi。
根据距离等式,可以得到以下方程组:(1) (x-x1)^2 + (y-y1)^2 = c^2*(t1-t)^2(2) (x-x2)^2 + (y-y2)^2 = c^2*(t2-t)^2...(N) (x-xN)^2 + (y-yN)^2 = c^2*(tN-t)^2其中,c是信号的传播速度,t是信号发射的时间。
通过求解这个方程组,可以得到目标的位置坐标(x, y)。
三、应用领域TDOA定位广泛应用于无线通信、雷达、航空航天等领域。
以下是几个具体的应用案例:1. 无线通信中的定位在无线通信中,TDOA定位可以用于移动通信系统中的呼叫跟踪、基站定位等。
通过测量不同基站接收到信号的时间差,可以确定用户设备的位置,实现精确的定位服务。
2. 雷达系统中的目标跟踪在雷达系统中,TDOA定位可以用于目标跟踪和定位。
通过多个雷达接收到目标信号的时间差,可以计算出目标的位置和速度,实现对目标的精确追踪。
3. 航空航天领域中的导航系统在航空航天领域,TDOA定位常用于卫星导航系统中。
通过接收不同卫星发射的信号,并测量信号到达的时间差,可以计算出接收器的位置,实现精确的导航定位。
基于TDOA原理计算信号源位置的算法探讨(C语言)省无线电监测中心唐皓吴季达鲁东生[摘要]目前,在无线电监测工作中小型监测站以其成本低、体积小、便于维护等众多优势得到广泛应用,已逐渐成为行业趋势。
但是,众多小型监测站目前仅具备监测功能,不具备测向功能,给未知信号源的定位带来诸多不便,因此基于TDOA (Time Difference Of Arrival)定位方法的研究便显得尤为重要。
本文中主要讨论基于未知信号源到不同监测站的时间差,计算未知信号源位置的方法,并用C语言实现。
[关键词] TDOA、双曲线、经纬度、时差定位概述TDOA(Time Difference Of Arrival)是通过测量无线电信号到达不同监测地点的天线单元时间差,来对发射无线电信号的发射源进行定位的技术。
根据平面解析几何原理,我们知道与平面上两个定点的距离之差的绝对值为定值的点的轨迹是双曲线。
在实际中,无线电波在空中以光速在空中传播,当有两个监测站搜到未知无线电信号时(若发射源不在两监测站的中心线上)则信号源一定在以两个监测站为交点的双曲线上,当有三个或三个以上的监测站都能收到该信号时,平面中的双曲线就会有交点,则未知信号源一定在其中的一个交点上。
如果我们能找出该交点,并输出该点的经纬度信息,那么就可以确定未知信号源的实际位置。
假设在每个小站都能接收GPS时钟,那么每个监测站的时钟将是同步的,再通过每个监测站对每一时隙监测到的时域数据打上时间戳,并将多个打好时间戳的数据返回一台服务器,那么就可以通过相关运算核对波形后找到时间差。
用时间差乘与在其环境中实际的光速则得到了未知信号源到达两个监测站的距离差。
目前由于各个厂商对各自设备的底层数据及接口大多都不开放,无法得到统一的数据结构并进行相关运算的程序开发。
因此,本文假设了以下条件进行讨论:1、假设有三个监测站能收到未知信号源的无线信号;2、 假设已通过相关算法得到了较为准确时间差,此时可以计算出未知信号源到达各个监测站的距离差; 3、 假设地球是正球体; 4、 假设未知信号源为全向发射;图1如图1示,当确定到达每两个监测站的距离差后就可以画出一对双曲线,同理可以画出3对双曲线,由于三对双曲线中任意两对都有共同的焦点,因此在平面必有交点。
室内定位技术中的定位算法的实时性与精度评估方法研究与结果比较分析随着智能移动设备的普及和应用场景的不断扩展,室内定位技术的需求愈发迫切。
室内定位算法作为室内定位技术的核心之一,是确定用户在室内环境中准确位置的重要手段。
本文将探讨室内定位算法的实时性与精度评估方法,并对常见的定位算法进行结果比较分析。
一、实时性评估方法为了评估室内定位算法的实时性,我们可以借鉴以下几种方法:1.1 到达时间差(Time of Arrival, TOA)方法这种方法主要基于无线信号的传播速度测量,根据定位系统发送信号和接收信号之间的时间差来计算用户的位置。
TOA方法具有较高的精度和实时性,但对硬件要求较高。
1.2 到达时间差差(Time Difference of Arrival, TDOA)方法与TOA方法类似,TDOA方法也是通过测量信号在不同基站之间的到达时间差来计算用户位置。
相较于TOA方法,TDOA方法更适用于多基站组网的场景,并具有较高的实时性。
1.3 接收信号强度指示(Received Signal Strength Indicator, RSSI)方法这种方法主要通过测量接收器接收到的信号强度来估计用户的位置。
RSSI方法成本较低,但准确性会受到多种因素的影响,如障碍物、信号衰减等。
因此,在使用该方法评估实时性时,需要根据具体信号强度与距离的映射关系进行校准。
二、精度评估方法为了评估室内定位算法的精度,以下几种方法可供参考:2.1 均方根误差(Root Mean Square Error, RMSE)方法RMSE是衡量定位算法结果与真实位置差异的一种常用指标。
通过计算算法定位结果与真实位置坐标之间的欧氏距离,然后求平均数并开根号得到RMSE值。
较小的RMSE值代表较高的定位精度。
2.2 平均误差(Mean Error, ME)方法ME指标表示算法定位结果与真实位置坐标之间的平均误差。
计算方法是将所有定位误差的绝对值求和,再除以总计定位点的数量。
基于TDOA的chan算法(定位算法)Chan算法原理TDOA(TDOA,the time differences of arrival,到达时间差),Chan算法是TDOA定位方法的一个很好用的方法。
Chan算法是非递归双曲线方程组解法,具有解析表达式解,主要特点是:在测量误差服从理想高斯分布时,它的定位精度高、计算量小,并且可以通过增加已确定点的数量来提高算法精度。
该算法的推导前提是基于测量误差为零均值高斯随机变量,对于实际环境中误差较大的测量值,比如在有非视距误差的环境下,该算法的性能会有显著下降。
二维情况下,可分为只有三个点参与定位和三个点以上参与定位。
已知坐标 ( x 1 , y1 ) , ( x2 , y 2 ) , ( x3 , y 3 ) (x_1, y_1), (x_2, y_2), (x_3, y_3) (x1,y1),(x2,y2),(x3,y3),假设第未知点的坐标是 ( x , y ) (x, y) (x,y)根据几何关系定义一下关系表达式:r i = ( x i − x ) 2 + ( y i − y ) 2 r_i =\sqrt{(x_i-x)^2+(y_i-y)^2} ri=(xi−x)2+(yi−y)2... ... ... ( 1 ) \dots\dots\dots(1) (1)r i , 1 = r i − r 1 = ( x i − x ) 2 + ( y i − y ) 2 − ( x 1 − x ) 2 + ( y 1 − y ) 2 r_{i,1}=r_i-r_1=\sqrt{(x_i-x)^2+(y_i-y)^2}-\sqrt{(x_1-x)^2+(y_1-y)^2} ri,1=ri−r1=(xi−x)2+(yi−y)2−(x1−x)2+(y1−y)2... ... ... ( 2 ) \dots\dots\dots(2) (2)根据(1)另有如下关系:先令 K i = x i 2 + y i 2K_i=x_i^2+y_i^2 Ki=xi2+yi2r i 2 = x i 2 + y i 2 = K i − 2 x i x − 2 y i y + x 2 + y 2 r_i^2=x_i^2+y_i^2=K_i-2x_ix-2y_iy+x^2+y^2 ri2 =xi2+yi2=Ki−2xix−2yiy+x2+y2 … … … ( 3 )\dots\dots\dots(3) (3)根据(2)另外有如下关系:r i 2 = ( r i , 1 + r i ) 2 r_i^2=(r_{i,1}+r_i)^2 ri2 =(ri,1+ri)2 ... ... ... ( 4 ) \dots\dots\dots(4) (4)将(3)代入(4)可推出如下关系(关键):r i , 1 2 + 2 r i , 1 r 1 = x i 2 + y i 2 − 2 x i x − 2 y i y + 2 x 1 x + 2 y 1 y − ( x 1 2 + y 1 2 ) = r i 2 − r 1 2 r_{i,1}^2+2r_{i,1}r_1=x_i^2+y_i^2-2x_ix-2y_iy+2x_1x+2y_1y-(x_1^2+y_1^2)=r_i^2-r_1^2ri,12+2ri,1r1=xi2+yi2−2xix−2yiy+2x1x+2y1y−(x12+y12 )=ri2−r12 ... ... ... ( 5 ) \dots\dots\dots(5) (5)进一步,令 x i , 1 = x i − x 1 x_{i,1}=x_i-x_1 xi,1=xi−x1,有r i , 1 2 + 2 r i , 1 r 1 = ( K i − K 1 ) − 2 x i , 1 x − 2 y i , 1 y r_{i,1}^2+2r_{i,1}r_1=(K_i-K_1)-2x_{i,1}x-2y_{i,1}y ri,12+2ri,1r1=(Ki−K1)−2xi,1x−2yi,1y这里(5)是关键一步:消除了未知数的平方项,仅保留一系列的线性方程。
tdoa定位原理TDOA(Time Difference of Arrival)定位是一种基于测量信号到达不同时间的定位方法。
它广泛应用于无线通信领域,包括雷达、无线传感器网络和移动通信系统等。
TDOA定位的原理基于多个接收器(或基站)同时接收同一信号,并通过测量信号到达不同接收器的时间差来计算目标的位置。
在这个过程中,信号的传输速度可以近似为光速。
根据光速的快速传播,可以认为信号从发射源处向各个接收器传播的时间差与目标距离接收器的距离差是一致的。
首先,需要至少三个接收器(或基站)来进行TDOA定位。
这是因为由于接收器数量的限制,至少需要三个接收器来计算三个未知数,即目标在三维空间中的坐标。
接收器的位置必须预先知道,可以通过GPS或其他测量方法进行测量。
然后,在接收到信号后,每个接收器都会记录下信号到达的时间点。
为了保证测量的准确性,接收器之间的时间同步非常重要。
这可以通过采取同步措施(例如时间同步信号或GPS接收器)来实现。
接下来,通过测量信号到达不同接收器的时间差,可以计算出目标与接收器之间的距离差。
具体的计算方法是将时间差转换为距离差,然后结合接收器的位置信息,利用三角定位的原理来计算目标的位置。
这种计算方法可以通过使用超几何定位(Hyberbolic Localization)来实现。
超几何定位利用了双曲线的性质。
在二维空间中,双曲线是由到达两个接收器的信号所构成的。
由于到达时间差是已知的,通过绘制这些双曲线,可以找到目标所在的位置。
在三维空间中,类似的原理也适用,但需要将二维的双曲线扩展为三维的双曲面。
最后,通过使用多个接收器的测量结果,目标的准确位置可以通过求解多个方程组来计算。
这可以通过使用迭代算法(如非线性最小二乘法)来实现。
TDOA定位具有许多优点。
首先,它可以使用已有的无线通信基础设施来进行定位,无需额外的传感器或设备。
其次,由于TDOA定位只测量时间差,而不需要测量具体的信号强度,因此可以减少定位中的信号传播误差。
5G UL TDOA定位算法流程随着5G技术的发展,定位算法也得到了越来越多的关注和应用。
UL TDOA(Uplink Time Difference of Arrival)定位算法作为5G中一种重要的定位技术之一,其定位精度高、定位范围广等特点,被广泛应用于室内定位、智能导航、无人驾驶等领域。
本文将结合相关理论知识,介绍5G UL TDOA定位算法的流程。
一、5G UL TDOA定位算法概述1. UL TDOA定位原理UL TDOA定位算法是利用移动终端定位的信号在不同基站之间的到达时间差来计算移动终端的位置。
通过测量信号到达不同基站的时间差,可以利用三边定位法则计算出移动终端的准确位置。
2. UL TDOA定位技术特点(1)支持高精度室内外定位UL TDOA定位技术可以实现室内外定位,且其定位精度高,能够满足高精度定位需求。
(2)支持大规模设备定位UL TDOA定位技术能够支持大规模设备同时进行定位,适用于大规模智能物联网场景。
(3)能耗低UL TDOA定位技术在进行定位过程中能耗较低,有利于延长移动终端的续航时间。
二、5G UL TDOA定位算法流程1. 数据采集移动终端首先需要向周围的多个基站发送信号,并获取各个基站接收到信号的时间戳,作为初始数据。
2. 信号传输基站接收到移动终端发送的信号后,将信号经过处理传输到定位服务器,包括信号的时间戳、信号强度等信息。
3. 信号处理定位服务器对接收到的信号进行处理,包括信号时间戳的提取、计算信号到各个基站的时间差等。
4. 定位计算基于接收到的信号数据,定位服务器利用UL TDOA定位算法进行位置计算,得出移动终端的准确位置。
5. 结果反馈定位服务器将计算出的位置信息反馈给移动终端,移动终端则可以根据获取到的位置信息进行相应的应用。
三、5G UL TDOA定位算法的优势与挑战1. 优势(1)实现高精度定位UL TDOA定位算法能够实现移动终端的高精度定位,满足各种场景下的定位需求。
TDOA 定位算法研究专 业:指导教师:院(系):毕业设计(论文)题目基于TDOA的定位算法研究专业 _________________学号 ____________________学生 ________________________指导教师__________________________答辩日期__________________无线传感器网络可以看成是由数据获取网络、数据分布网络和控制管理中心三部分组成的。
其主要组成部分是集成有传感器、数据处理单元和通信模块的节点,各节点通过协议自组成一个分布式网络,再将采集来的数据通过优化后经无线电波传输给信息处理中心。
因此,其最重要的核心部位是节点传感器,应用的范围是面对广大使用用户和各种科技创新范围,其功能的关键所在是为用户提供可靠的、准确的、实时的研究数据。
那么,定位技术作为将这个核心”和关键”连接的纽带,它的重要性不言而喻。
本文首先通过调查无线传感器网络的发展历程,然后再研究其能够实现的各种功能,结合国内外在其各个领域像组网方式等的研究现状,通过分析,在分析的过程当中选择研究方向,最后通过选择,在定位算法上得到了突破口,然后研究的后续内容得以展开。
其次介绍了无线传感器的基础概念,分析其各个基本单元在其组成的网络当中的主要实现的功能,然后在其测距算法的类别中,介绍了三种经典算法理论,并同时与非测距算法对比,得出非测距算法的优越性,分析和研究目前已有的三种应用算法,最后整理出算法的改进方法。
通过对于TDOA定位查恩算法、TDOA定位最小二乘法算法以及TDOA定位最小二乘法加权算法来进行研究,按照提高精度的思路,最终在三种算法基础上尝试一种优化算法即进行质心处理的算法。
然后用仿真软件matlab软件进行组网和仿真,并且最终通过matlab进行仿真并且得到成功的验证。
然后大量的实验数据证明,通过质心加权处理的TDOA定位算法可以在实际中得到应用。
关键词:无线传感器网络;chan算法;TDOA ;质心加权;锚节点-I-AbstractWireless sensor networks can be seen by the data acquisition network, data distributi on n etwork and con trol man ageme nt cen ter composed of three parts. The main comp onents of the in tegrated sen sor, the data process ing unit and a com muni cati on module no des, each node through a distributed n etwork protocol from the compositi on, then the collected data via radio waves through the optimized transmission to the information processing center. Therefore, the most important part of it is the core of the sen sor no des, in the face of broad range of applicatio ns and a variety of scie ntific and tech no logical inno vatio n with user scope, its key functions is to provide users with reliable, accurate, real-time research data. Then, positi oning tech no logy as this "core" and "key" connection lin k, its importa nee is self-evide nt.Firstly, by investigating the development process of the wireless sensor network, and the n study its various fun cti ons can be achieved, at home and abroad in their various fields such as n etwork ing research status, through the an alysis, the an alysis of the process of selecti on research directi on, Fi nally, choose the positi oning algorithms to get a breakthrough, and then a follow-up study to expand the content. Secondly introduces the basic concepts of wireless sensorsto analyze the composition of each basic unit in the network among its main function, and location algorithm in its category, we introduce three classical algorithm theory, and also with non-Ranging algorithm comparison algorithm derived non-ranging superiority, analysis and research three applicati ons curre ntly available algorithms, and fin ally sorted out the algorithm method.By Chan for the TDOA algorithm, TDOA positioning method of least squares algorithm and weighted least squaresmethod TDOA locati on algorithm to con duct a study to improve the accuracy in accordanee with the idea, culminating in three algorithms based on an optimization algorithm that attempts to carry out centroid process ing algorithm . Then use simulati on software matlab software n etwork ing and simulation, and ultimately through matlab simulation and verification successfully. Then a large nu mber of experime ntal data proved that through the cen troid weight ing process TDOA algorithm can be applied in practice.Keywords: wireless sensor networks, chan algorithm, TDOA, weighted centroid, time delay-ii-目录摘要 (I)Abstract .............................................................................................. 11..第1章绪论 (1)1.1课题的来源 (1)1.2课题的研究目的 (2)1.3国内外研究现状 (3)1.4本文的主要研究内容 (5)第2章无线传感器网络定位技术研究 (6)2.1无线传感器网络的具体结构以及优势 (6)2.2算法定义和相关参数 (10)2.3无线传感器网络的基础定位算法 (11)2.3.1TMM 算法 (11)2.3.2MLE 算法 (12)2.3.3非测距的WCL算法 (13)2.3.4非测距的迪维-跳数算法 (14)2.4系统的设计标准与评价参数 (16)2.5本章小结 (17)第3章TDOA定位算法 (19)3.1TDOA算法概述 (19)3.2TDOA算法的时延估计 (19)3.3无线传感器网络的基础定位算法 (23)3.3.1无线传感器网络的实验模型设置 (23)3.3.2无线传感器网络的数学模型设置 (23)3.3.3TDOA技术工程应用-查恩算法 (25)3.3.4TDOA技术数学应用算法-最小二乘法 (25)3.3.5TDOA技术最小二乘法的加权处理 (26)3.3.6质心加权算法 (27)3.4本章小结 (27)-III-第4章TDOA算法的实验仿真与数据分析 (29)4.1定位时延实验仿真设计与数据分析 (29)4.1.1时延仿真系统的设计 (29)4.1.2时延仿真数据分析 (30)4.2基于TDOA技术的定位算法仿真设计与数据分析 (31)4.2.1时延仿真数据分析 (31)4.2.2查恩算法实验仿真与数据分析 (31)4.2.3最小二乘算法实验仿真与数据分析 (33)4.2.4最小二乘算法加权处理后的实验仿真与数据分析 (35)4.3基于质心加权处理算法的实验仿真与数据分析 (36)4.3.1查恩算法实验仿真与数据分析 (36)4.3.2最小二乘算法实验仿真与数据分析 (37)4.3.3最小二乘加权算法实验仿真与数据分析 (38)4.4本章小结 (40)结论 (41)参考文献 (42)附录1 (45)附录2 (49)-IV-第1章绪论1.1课题的来源近年来,无线通信、微电子技术、传感器技术以及嵌入式计算等技术的不断进步,推动了低成本、低功耗无线传感器网络(Wireless Sensor Network , WSN)的发展,促使无线传感器网络成为当今活跃的研究领域。
无线传感器网络是新型的传感器网络,同时也是一个多学科交叉的领域,与当今主流无线网络技术一样,均使用802.15.4的标准。