基于DV-Hop修正的泰勒级数的定位算法
- 格式:docx
- 大小:42.51 KB
- 文档页数:9
基于改进DV-Hop的无线传感器网络定位算法优化基于改进DV-Hop的无线传感器网络定位算法优化摘要:随着无线传感器网络(Wireless Sensor Networks, WSNs)的广泛应用,节点定位的准确性和精度已成为无线传感器网络中的一个重要问题。
DV-Hop是一种经典的无线传感器网络定位算法,但存在定位误差大、能耗高以及稳定性差的问题。
为了改进DV-Hop算法,本文提出了一种基于改进DV-Hop 的无线传感器网络定位算法优化方案。
通过对跳数获取和参考节点选择的改进,提高了定位的准确性和精度,并通过在网络中添加时钟同步机制来提高算法的稳定性。
实验结果表明,所提出的优化算法在定位精度和稳定性方面都有显著的改善。
关键词:无线传感器网络、定位算法、DV-Hop、优化、准确性1. 简介无线传感器网络的节点定位对于许多应用至关重要,如环境监测、目标追踪等。
传统的DV-Hop算法是一种常用的无线传感器网络定位算法,但其存在误差大、能耗高以及稳定性差的问题。
因此,对DV-Hop算法进行改进以提高定位精度和稳定性是一个重要的研究方向。
2. DV-Hop算法原理DV-Hop算法的基本思想是通过测量节点之间的跳数和节点之间的距离,来实现无线传感器网络中的节点定位。
算法流程如下:(1)节点跳数获取:每个节点通过广播消息的方式将其跳数信息传递给周围的节点;(2)参考节点选择:每个节点根据其邻居节点的跳数信息,选择相对跳数最小的邻居节点作为参考节点;(3)定位信息计算:每个节点通过测量与参考节点之间的距离,以及参考节点的位置信息,计算自己的位置。
3. 改进DV-Hop算法为了提高DV-Hop算法的定位精度和稳定性,本文提出了以下改进:(1)跳数获取改进:传统的DV-Hop算法通过广播方式获取节点的跳数信息,容易受到干扰和错误,影响定位的准确性。
本文提出使用局部信息和全局信息相结合的方式来获取节点的跳数信息,减少了干扰和错误的可能性。
基于DV-HOP的改进定位算法孟雯雯;赵建平;王蒙;杨恒耀;张浩【摘要】Node localization technology is one of the key technologies in wireless sensor networks. DV-Hop localization algorithm based on the double communication radius, as compared with the traditional algorithms, could fairly improve the positioning accuracy, and however, this accuracy still has the space to be further improved. Based on the double communication radius location algorithm, the formula for calculating the average hop distance of anchor nodes is improved by using the concept of hop value transformation, and in combination with the weighted average per hop distance. MATALB simulation indicates that the proposed algorithm based on the double communication radius algorithm of DV-Hop algorithm, can improve the positioning accuracy. In addition, this modified algorithm could not increase hardware cost of the node.%节点定位技术是无线传感器网络的关键技术之一.基于双通信半径的DV-Hop定位算法,比传统DV-Hop算法大大提高了定位精度,但是还可以进一步改进.在双通信半径定位算法基础上,用跳数值变换概念改进锚节点计算平均每一跳距离的公式,并结合平均每跳距离进行加权处理.MATALB仿真实验证明,提出的基于双通信半径的跳数变换加权DV-Hop算法能提高基于双通信半径算法的定位精度,且不会增加节点的硬件成本.【期刊名称】《通信技术》【年(卷),期】2016(049)011【总页数】6页(P1447-1452)【关键词】无线传感器网络;节点定位;双通信半径DV-Hop;加权DV-HOP【作者】孟雯雯;赵建平;王蒙;杨恒耀;张浩【作者单位】曲阜师范大学物理工程学院,山东曲阜 273165;曲阜师范大学物理工程学院,山东曲阜 273165;曲阜师范大学物理工程学院,山东曲阜 273165;曲阜师范大学物理工程学院,山东曲阜 273165;曲阜师范大学物理工程学院,山东曲阜273165【正文语种】中文【中图分类】TP212.9;TN929.5无线传感器网络(Wireless Sensor Network,WSN)有大量微型﹑低成本的节点,在无人值守的应用环境中,节点一般由飞机等随机抛撒[1]。
基于DV—Hop定位算法的改进作者:夏少波连丽君王鲁娜朱晓丽邹建梅来源:《计算机应用》2014年第05期摘要:针对DV-Hop算法采用跳数乘以平均每跳跳距估算节点间的跳距,利用三边测量法或极大似然估计法估算节点坐标信息,算法过程存在缺陷从而造成定位误差过高的问题。
为此提出一种基于节点密度区域划分的DVHop改进算法(DZDVHop),依据网络的连通度和节点密度限制参与估算的信标节点的跳数,采用加权质心法估算定位坐标。
Matlab仿真测试结果表明,在相同的网络硬件和拓扑结构环境下,改进后的算法能有效地减少节点通信量,且平均定位误差率比传统的DVHop算法减少了13.6%左右,提高了定位精度。
〖BP)〗针对DVHop算法采用跳数乘以平均每跳跳距估算节点间的跳距,利用三边测量法或极大似然估计法估算节点坐标信息,算法过程存在缺陷从而造成定位误差过高的问题。
为此提出一种基于节点密度区域划分的DVHop改进算法(DZDVHop),依据网络的连通度和节点密度限制参与估算的信标节点的跳数,采用加权质心法估算定位坐标。
Matlab仿真测试结果表明,在相同的网络硬件和拓扑结构环境下,改进后的算法能有效地减少节点通信量,且平均定位误差率比传统的DVHop算法减少了13.6%左右,提高了定位精度。
关键词:无线传感器网络;密度区域划分;节点定位;限跳机制中图分类号:TP393文献标志码:A0引言现代电子技术、检测技术和信号处理等技术的进步,促进了低功耗、多功能智能传感器的快速发展[1]。
无线传感器网络(Wireless Sensor Network, WSN)是指由大量成本低廉的具有智能感知能力、计算能力、无线通信能力的传感器节点组成的网络,它可以感知、采集和处理网络覆盖区域内目标对象的信息[2-3]。
作为一种新型信息获取的系统,WSN广泛应用于军事、环境监测、城市交通、灾难防控等众多领域[4]。
节点定位问题是传感器网络进行目标识别、监控、定位等应用的前提,也是传感器网络应用的关键技术之一[5-7]。
DV-Hop 定位算法改进1.DV-Hop 算法原理及性能1.1.算法原理i. DV-Hop 算法是典型的无需测距的定位算法, 基本思想是将未知节点到信标节点之间的距离用网络中节点的平均每跳距离和两节点之间跳数的乘积来表示, 然后再使用三边测量法或极大似然估计法来获得未知节点的位置信息。
DV-Hop 算法定位过程分以下三个步骤:ii. 信标节点位置已知, 计算未知节点与每个信标节点的最小跳数计算未知节点与每个信标节点的最小跳数, 计算公式如下i j i iji j HopSize h ≠≠=∑iii. 利用三边测量法计算自身位置1.2.算法性能DV-Hop 算法依据信标节点间的跳数来计算平均距离, 所以信标节点比例对算法定位精度存在直接的影响。
一方面, 信标节点的位置信息通常依赖于人工部署或者GPS 实现。
人工部署受限于环境同时也限制了网络的可扩展性;而使用GPS 会使得节点费用比普通节点高两个数量级, 成本太高。
另一方面, 无须测距定位算法中, 信标节点比例越高, 定位越精确。
所以信标节点比例和成本需要权衡。
同时, DV-Hop 算法对网络的拓扑结构也十分敏感。
在实际网络拓扑中, 未知节点与信标节点间的路径往往不是直线, 而是存在“空洞”, 使得估算距离远大于实际距离, 定位精度大打折扣, 即DV-Hop 算法仅在各向同性的密集网络中, 校正值才能被合理的估算。
所以DV-Hop 算法的性能在一定程度上取决于网络结构和信标节点比例。
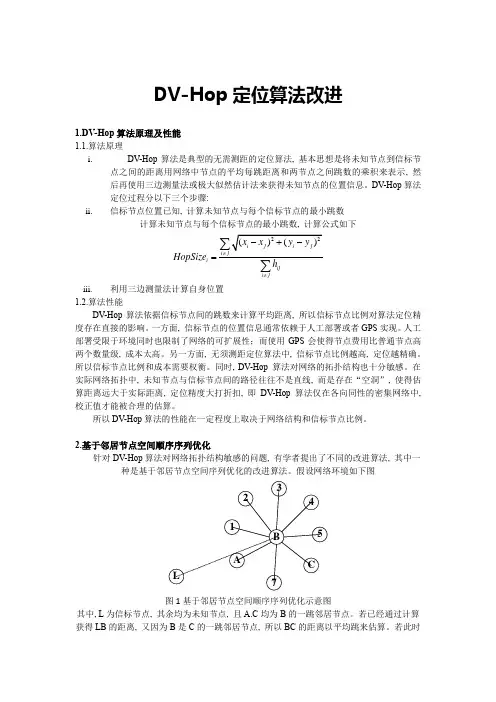
2.基于邻居节点空间顺序序列优化针对DV-Hop 算法对网络拓扑结构敏感的问题, 有学者提出了不同的改进算法, 其中一种是基于邻居节点空间序列优化的改进算法。
假设网络环境如下图AB CL 123457图1基于邻居节点空间顺序序列优化示意图其中, L 为信标节点, 其余均为未知节点, 且A.C 均为B 的一跳邻居节点。
若已经通过计算获得LB 的距离, 又因为B 是C 的一跳邻居节点, 所以BC 的距离以平均跳来估算。
无线传感器网络中一种改进的DV-HOP定位算法无线传感器网络(WSN)的定位问题是WSN研究的一个重要问题。
为了解决WSN节点位置信息探测问题,目前已经出现了多种定位算法,其中基于锚节点的距离向量(DV-HOP)算法是一种常用的算法。
然而,随着WSN的不断发展,DV-HOP算法仍然存在一些局限性。
为了提高算法的精度和效率,本文提出一种改进的DV-HOP定位算法。
改进的DV-HOP算法通过计算节点的质心来代替原有算法中的跳数追踪方法。
质心是指节点周围一定半径范围内其他节点的平均位置。
在该算法中,每个节点将根据他们周围的可用锚节点和未知节点,计算出质心的位置。
质心的计算将代替原有算法中的“跳数追踪”方法,从而避免跳数计算所引起的任何误差以及跳数的人为设定。
基于质心的定位方法计算质心位置比跳数追踪更精确,同时也减少了通信开销。
它可以通过与邻近节点共享信息来减少跳数,并且还可以对节点中断连接后的位置进行更准确的计算。
为了进一步减少定位误差,改进的DV-HOP算法引入了一种贪心选择算法,通过这种算法选择在目标节点周围半径内最优的一组锚节点来进行计算。
该算法会考虑到锚节点之间的距离和信噪比等因素来进行选择而不是选择所有可用的锚节点。
这种方法可以有效地降低定位误差。
改进的DV-HOP算法实现简单,可以有效地减少跳数的误差和通信成本,提高定位算法的精度和效率。
在真实环境下的测试结果表明,该算法的准确性在相同条件下优于传统的DV-HOP算法。
总之,改进的DV-HOP定位算法是一种有效的算法。
它可以在无线传感器网络中用于节点的定位,提高其精度和效率。
这种算法的实现简单,可以应用于许多实际的应用程序中。
为了分析改进的DV-HOP定位算法在无线传感器网络中的有效性,我们进行了一组实验,并收集一些相关数据。
在实验过程中,我们使用了30个Mica-2传感器节点,其中6个节点作为锚节点,其余24个节点作为未知节点。
我们在一个15 m x 15 m的区域内布置了这些节点,并在节点上部署了MicaSense传感器,用于收集节点之间的距离信息。
基于坐标改正的改进DV-Hop定位算法节点定位技术作为无线传感网络(Wireless Sensor Network,WSN)最关键的技术之一,是诸多相关应用的基础。
按照定位过程中测距与否,节点定位算法分为基于测距定位算法和免测距定位算法。
前者虽定位精度较高,但成本及能耗较大,对硬件和周围环境要求较高,实用价值较低;后者只需依靠网络连通性或网络拓扑关系进行节点定位,因无需测量节点间距离从而有效的避免了直接测距误差的引入,具有成本低、易实现等优势,在实际应用中更受青睐。
DV-Hop算法作为一种经典的免测距定位算法,具有实现简单、定位精度高、成本和计算开销低等优点,被视为当前WSN实际应用广泛的定位算法。
但该算法在拓扑随机的网络中往往定位误差较大。
针对上述问题,本文深入研究了DV-Hop算法原理及实现过程,详细分析了其误差产生原因,在借鉴前人的优秀研究成果的基础上提出了改进算法。
本文的主要工作如下:1)介绍了DV-Hop算法的原理、实现步骤,通过仿真实验剖析了其误差来源,并对已有DV-Hop改进算法进行全面的概括和分类。
2)提出了名为CC-DV-Hop的改进算法。
首先,定义伪距误差因子筛选K个对平均跳距计算产生较小误差的参考节点,修正平均跳距的同时有效抑制网络拓扑随机分布影响;然后,视锚节点为未知节点,在修正平均跳距的同时,运用三边或多边测量法评估自身定位坐标和坐标改正值,并将修正后的平均跳距与坐标改正值向网络广播;最后,未知节点根据接收到的锚节点信息进行定位,并利用特定锚节点的定位误差来修正自身定位误差,从而有效提高节点定位精度。
3)借助Matlab7.0平台进行仿真分析。
仿真结果表明:CC-DV-Hop算法的每个改进阶段均有效的提升了DV-Hop算法的节点位置估算精度;CC-DV-Hop算法定位精度比DV-Hop算法提升约24%~35%,比部分改进算法具有更高的定位精度和稳定性;当K值为锚节点的1/3~1/2时,CC-DV-Hop算法的节点位置估算最准确;从通信开销和算法复杂度考虑,相同的通信开销下,CC-DV-Hop算法虽算法复杂度略高,但定位精度提升明显。

DV-Hop测距修正的定位算法研究余科军;张建州【摘要】针对DV-Hop测距定位精度不准问题,提出基于DV-Hop测距修正的对数搜索(improved DV-Hop Ranging-based Logarithmic Search,DH-RLS)定位算法.DH-RLS算法利用锚节点间的真实距离信息估计跳距误差,修正跳距值,提高测距精度.利用质心定位算法估计未知节点的位置,并将此位置作为搜索起点,再利用搜索目标函数进行搜索,直至搜索到具有最小距离误差和的点.仿真数据表明,DH-RLS 定位算法的归一化平均误差低于同类算法.通过对测距修正,降低了测距误差,同时利用搜索目标算法提高了定位精度.%In order to improve the accuracy of localization algorithm based on DV-Hop ranging, an improved DV-Hop Ranging-based Logarithmic Search(DH-RLS)localization algorithm is proposed in this paper. DH-RLS first estimates the error of hop distance by the real distance between anchor nodes, and it corrects the hop distance to improve the ranging accuracy. The position of nodes is estimated by centroid localization algorithm, which is considered to be search initial point. DH-RLS employs search objective function, until the position with minimizing the sum of distance error is searched. Numerous simulation results show that normalized average localization error ratio of DH-RLS algorithm is less than that of traditional DV-Hop algorithm. The ranging error is reduced by correcting ranging value, and accuracy of local-ization is improved by search localization.【期刊名称】《计算机工程与应用》【年(卷),期】2019(055)015【总页数】5页(P123-127)【关键词】无线传感网络;DV-Hop算法;质心定位;跳距;对数搜索【作者】余科军;张建州【作者单位】成都师范学院计算机科学学院,成都 610000 ;四川大学计算机学院,成都 610065【正文语种】中文【中图分类】TP3931 引言由海量传感节点组成,且以无线方式通信所构成的自组织网络称为无线传感网络(Wireless Sensor Networks,WSNs)[1-2]。
目录摘要 (I)Abstract (II)第1章引言 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (1)1.3本文研究内容和结构安排 (2)1.4小结 (3)第2章无线传感器网络定位技术 (4)2.1距离无关的定位算法分析 (4)2.1.1质心算法 (4)2.1.2Sum-dist算法 (5)2.1.3DV-Hop算法 (5)2.2定位性能评价指标 (7)2.2.1定位精度 (7)2.2.2锚节点密度和节点密度 (7)2.2.3功耗与代价 (7)2.2.4容错性和自适应性 (8)2.2.5其他相关评价指标 (8)2.3小结 (8)第3章DV-Hop定位算法及其改进算法的研究 (9)3.1DV-Hop算法流程 (9)3.2DV-Hop算法误差分析 (10)3.3DV-Hop算法改进 (11)3.4小结 (12)第4章MATLAB仿真及结果分析 (13)4.1MATLAB仿真环境简介 (13)4.2网络模型与参数获取 (13)4.3仿真结果与性能分析 (14)4.4小结 (18)第5章总结与展望 (19)5.1总结 (19)5.2展望 (19)致谢参考文献附录基于DV-Hop定位算法的改进及仿真摘要:节点定位技术是无线传感器网络众多研究领域中的核心技术之一,是无线传感器网络用于目标监测、目标识别以及目标跟踪等应用的支撑。
无线传感器网络因为应用环境的特殊性,使得事先将所有节点部署在感知区域中难以实现。
同时,传感器节点低成本和低能耗的特点,使得让所有节点直接应用GPS或使用其它外部设施等装置实现定位也有较大难度。
为了能够保证节点定位算法的低误差、低能耗和高效率,对无线传感器网络中节点定位机制的研究就显得至关重要。
本文重点研究了基于非测距的无线传感器网络中的节点定位技术。
在此定位技术中,DV-Hop定位算法应用最为广泛,但此算法的缺点是用跳段距离代替直线距离,因此,只有在各向同性的密集网络中才能得到较高的定位精度,而在随机分布的无线传感器网络中则存在较大的误差。
基于DV-Hop定位算法的改进摘要:提出了一种改进的DV-Hop 定位算法,通过对DV-Hop算法的局部优化,减小了定位计算量,并使得改进的DV-Hop算法对不规则形状的节点分布网络具有较强的适应性,克服了原算法只适用于各向同性网络的不足。
仿真结果表明,改进的DV-Hop 算法减小了用于定位的通信开销,提高了定位精度,从而验证了改进的DV -Hop算法能够适用于节点不规则分布的异性网络。
无线传感器网络是当前在国际上备受关注的、涉及多学科高度交叉、知识高度集成的前沿热点研究领域 .对于传感器网络来说,传感器节点的位置信息至关重要,事件发生的位置或获取信息的节点位置是传感器节点监测消息中所包含的重要信息,没有位置信息的监测数据往往毫无意义。
因受成本、功耗、扩展性等问题的限制,为每个传感器安装GPS模块等这些传统定位手段并不实际,甚至在某些场合可能根本无法实现,而且GPS定位在定位精度、实时性方面有时并不能满足特定的需求,因此针对具体的定位需求,必须采用一定的算法机制来实现传感器节点的定位。
无线传感器网络节点按定位过程中是否需要测距信息,可分为无需测距的定位方法和基于测距技术的定位方法。
近年来,关于传感器网络节点定位技术研究成为无线传感网络技术的一重要研究热点并取得大量的研究成果。
其中,具有代表性算法研究成果有:凸规划算法及其改进算法, APS 算法、Cooperative Ranging 、AHLos 算法、nHopMultilateration Primitive 算法、MDS-MAP 算法等。
无需测距的定位方法被认为是一类具有好的成本效益的解决方案。
在无需测距定位方法中,DV-Hop节点定位方法由于对信标节点比例要求较少,定位精度较高,目前已成为一种经典的无需测距定位方法。
DV-Hop定位方法的主要思想是引入最短路径算法到信标节点的选择过程中,从而在未知节点的位置估计过程中可以有效利用多跳信标节点的位置信息,这种方法可以大大减少实现网络定位所需信标节点的比例(密度),从而大大降低网络的布置成本。
一种基于跳数修正的DV-Hop定位算法肖丽萍;刘晓红【摘要】节点定位技术是无线传感器网络的关键支撑技术之一,传统DV-Hop定位算法中节点间跳数只以整数增加,从而降低了定位精度.针对传统定位算法定位误差较大的问题,提出了一种新的基于跳数修正的DV-Hop定位算法.该算法从两方面进行了改进:对锚节点间的跳数进行修正,使得跳数不再只是整数;对未知节点与锚节点间的跳数进行修正,使得未知节点与锚节点之间的估计距离更加准确.最后,对传统算法和改进算法的性能进行了仿真,结果表明在不增加额外硬件开销的前提下,改进算法可以有效地提高定位精度.%Localization is one of the key supporting technologies in wireless sensor networks. The hops between all nodes of the traditional DV-Hop localization algoritnm were integer, to some extent, that reduced the positioning accuracy. To solve the problem of low positioning accuracy in traditional DV-Hop,a new localization algorithm based on hop amendment is proposed. This paper mainly focuses on two aspects: Firstly, the hops between all archor nodes are refined to make sure that hops between archor nodes are not only integer,but also decimal. Secondly,the hops between archor nodes and unknown nodes are refined to make the estimated distance more accurate. The simulation results show that the proposed improved algorithm has obviously better locating performance in positioning accuracy than that of the traditional localization algorithm without additional hardware.【期刊名称】《传感技术学报》【年(卷),期】2012(025)012【总页数】5页(P1726-1730)【关键词】无线传感器网络;DV-Hop;跳数修正;定位误差;定位精度【作者】肖丽萍;刘晓红【作者单位】燕山大学信息科学与工程学院,河北秦皇岛066004;燕山大学信息科学与工程学院,河北秦皇岛066004【正文语种】中文【中图分类】TP393无线传感器网络WSN(Wireless Sensor Networks)是由部署在监测区域内的大量廉价微型传感器节点通过无线通信方式形成的一个多跳的自组织的网络系统[1],其中节点定位技术是其关键技术之一。
基于进化算法的多通信半径DV-Hop改进定位算法陈业海;郑日荣;许亮【摘要】定位是无线传感器网络中最重要的问题之一.针对DV-Hop算法定位精度低问题,提出基于进化算法的多通信半径DV-Hop改进定位算法.该方法在多通信半径定位算法基础上,使用蛙跳算法对锚节点跳距进行优化,并对其适应值函数进行改进,让跳距值更接近真实值,然后在DV-Hop算法最后阶段利用遗传算法求解未知节点坐标.实验仿真结果表明,改进算法在不增加额外硬件情况下,大大降低了定位误差,相比于传统DV-Hop算法,定位精度提高了大约69%,相比其他文献,定位精度提高了大约21%.【期刊名称】《计算机工程与应用》【年(卷),期】2019(055)001【总页数】7页(P89-95)【关键词】无线传感器网络;DV-Hop算法;改进蛙跳算法;遗传算法【作者】陈业海;郑日荣;许亮【作者单位】广东工业大学自动化学院,广州 510900;广东工业大学自动化学院,广州 510900;广东工业大学自动化学院,广州 510900【正文语种】中文【中图分类】TP3931 引言无线传感器网络(Wireless Sensor Network,WSN)是由大量小而便宜的基于微机电系统的节点所组成。
这些传感器节点是随机分布在监测区域,根据需求收集环境信息和进行信息处理[1]。
每个传感器节点包含传感单元、处理单元、通信单元和电源部分,具有有限的计算能力、存储能力和通信范围,是一种低能耗的节点[2]。
无线传感器网络在军事侦察、环境监测和工业生产等前沿领域有着广泛的应用[3]。
在无线传感器网络的大多数应用中,节点的位置和数据的获取一样重要。
例如,在目标跟踪[4]、医疗保健[5]和智能社区[6]应用中,如果节点只获得信息而没有地理位置是没意义的。
未知节点获得位置信息最简单的解决方案之一是使用全球定位系统(GPS)。
但是,不可能把它应用到所有的传感器节点中,因为使用GPS增加节点的大小,功耗和成本,而且GPS设备在室内基本不能工作。
基于DV-Hop修正的泰勒级数的定位算法臧景才;延玉莲【摘要】To improve the localization accuracy of DV-Hop,improved DV-Hop ranging-based Taylor series expansion localization (I-DV-HOP-R-TSE) algorithm was proposed.In ranging phase,hop thresholds were calculated,the average hop distance was computed in four ways,and the distance was estimated by adeptly choosing average hop distance according to hop number,to reduce the ranging error.In localization phase,the positioning estimation was realized using the linear least square method based on Taylor series expansion.Numerous simulation results show that normalized average localization error ratio of I-DV-HOP-R-TSE algorithm is about 14%-16% less than that of traditional DV-Hop algorithm.%为提高DV-Hop算法的定位精度,提出基于DV-Hop测距修正的泰勒级数扩展的定位算法I-DV-HOP-R-TSE (improved DV-Hop ranging-based Taylor series expansion localization).在测距阶段,计算跳数阈值,采用4种不同方式计算平均跳距,依据跳数值择优选择平均跳距去估算距离,缩小测距误差;在定位阶段,利用泰勒级数扩展线性最小二乘法估计节点位置.仿真结果表明,与传统的DV H.p算法相比,I-DV-HOP-R-TS E算法的归一化平均误差率下降了约14%-16%.【期刊名称】《计算机工程与设计》【年(卷),期】2017(038)011【总页数】5页(P3036-3040)【关键词】无线传感网络;节点定位;DV-Hop;平均跳距;阈值;泰勒级数扩展【作者】臧景才;延玉莲【作者单位】青海广播电视大学继续教育学院,青海西宁810008;青海广播电视大学继续教育学院,青海西宁810008【正文语种】中文【中图分类】TP393无线传感网络WSNs(wireless sensor networks)是通过无线通信技术连通监测区内的海量传感节点[1,2],节点定位技术是WSNs的核心技术之一。
尽管利用全球定位系统GPS(global positioning system)可以获取节点位置信息,但给所有节点安装GPS系统是不现实。
一方面,传感节点体积小,是微型器件[3,4];另一方面,经济成本较大。
通常,只考虑给监测区内少数节点安装GPS,安装GPS系统的节点能够知晓自己位置,这些节点也称为锚节点。
相应地,未安装GPS系统的节点,且不知道自己位置坐标的节点,称为未知节点。
所谓定位算法就是通过系统信息估计未知节点的位置。
现有的定位算法主要由测距定位算法和非测距定位算法两类。
从定位精度性能方面,测距定位算法的精度优于非测距定位算法,但从软硬设备成本方面,非测距定位算法对软硬设备要求较低,更适合低功耗、低成本的大规模传感网络。
在非测距定位算法中,DV-Hop定位算法因简单、经济等特点被广泛应用。
然而,DV-Hop定位算法在测距过程中仍存在较大的误差,为此,研究人员提出了缩小误差的不同方案。
文献[5]提出基于人工蜂群的DV-Hop定位算法ABDV-Hop(artificial bee colony DV-Hop),将人工蜂群算法应用于DV-Hop中;文献[6]提出了基于RSSI测距的DV-Hop定位的改进算法,利用RSSI测距代替传统DV-Hop算法的测距;有研究团队利用最小二乘优化了单跳距离,使得平均定位误差较传统算法降低了大约13%[7];李长庚团队对跳数设计了相应的加权矩阵,利用加权最小平方法求解方程对未知节点进行修正有效的,提高了定位精度,减少误差[7];文献[8]利用接收信号强度指示(RSSI)修正节点间跳数,相比传统算法定位精度也有了较大提升。
为此,本文针对DV-Hop定位算法的不足,提出改进算法I-DV-HOP-R-TSE。
I-DV-HOP-R-TSE算法分别从DV-Hop测距阶段和定位阶段进行改进。
在测距阶段,引用阈值机制,并对测距进行校正;而在定位阶段,利用泰勒级数扩展的线性最小二乘法估计未知节点位置,降低了定位复杂度。
仿真结果表明,I-DV-HOP-R-TSE定位算法能够提高定位精度,有效降低定位误差。
1.1 DV-Hop测距原理DV-Hop测距主要由跳数估算和距离测算两个阶段。
在跳数估算阶段,锚节点先以洪泛式广播信息包,其包括锚节点位置和初始跳数,且初始跳数为零。
一旦接收到信息包,未知节点就记录离该锚节点跳数最少的跳数值NHop,并NHop+1,再存入信息包中,并向其它邻居节点转发信息包。
而在距离测算阶段,首先由锚节点估算平均跳距Hopsize,然后通过平均跳距Hopsize和跳数值的乘积测算距离。
锚节点获取了其它锚节点位置信息和跳数值后,便可计算平均跳距Hopsize。
具体而言,假定除锚节点At外,有m个其它锚节点,则锚节点At所估计的平均跳距Hopsizet其中,(xt,yt)表示锚节点At的位置坐标,而(xk,yk)表示除锚节点At外的第k个锚节点Ak位置坐标。
而htk表示At离Ak最小跳数值。
图1描述了DV-Hop测距原理。
L1、L2、L3为3个锚节点,其它节点为未知节点。
图中标出3个锚节点间的距离以及最小跳数值。
假定由锚节点L2计算平均跳距。
由于它离L1、L3的距离分别40 m、75 m,相应地,最小跳数分别为2、5。
则平均跳距Hopsizet未知节点得到平均跳距后,便可计算离锚节点间的距离。
仍以图1为例,未知节点A离L1、L2、L3的距离分别为1.2 问题描述从1.1节的测距过程,不难发现:基于DV-Hop测距存在误差。
首先,在估算平均跳距时是从全局考虑,既然是通过全局信息估计的平均跳距,它必然反映了全局范围内的节点分布情况,而忽略局部节点分布的差异性。
若节点分布不均匀,则计算出的平均跳距必然存在大的差距。
此外,当跳数增加时,即NHop≥2时,误差就会累加。
最终,导致测距误差越来越大。
目前,研究人员针对DV-Hop测距误差,提出不同的改进算法,例如,文献[9]提出基于最小均方误差准则的平均跳距,而文献[10]引用跳数区域划分来改进测量平均跳距误差。
这些策略能在一定程度上抑制测距误差,但仍存在改进的空间。
2.1 系统模型考虑二维(2-D)网络,定位区域为L×L。
n个未知节点,其位置坐标为θi=[xi,yi]T,且θ∈2。
通过m个锚节点估计未知的位置。
第k个锚节点的位置分别表示αk=[xk,yk]T,且k=1,2,…,m。
定位算法就是利用与锚节点间距离信息,估计θi的值,记为2.2 基于跳数分级的DV-Hop测距由于传统的DV-Hop测距算法在计算平均跳距时,未考虑到节点分布情况,只是从全局角度计算平均跳距。
为此,本文引用基于跳数分级策略估算平均跳距。
首先,考虑到锚节点分布密度信息,并据此计算跳数阈值Hopth。
结合文献[11],定义了跳数阈值Hopth其中,R表示节点通信半径。
ρ为锚节点分布密度。
本文从4种不同角度计算平均跳距。
第一种,就是传统的计算平均跳距方法,如式(1)所示。
第二种,就是通过引入误差,修正由式(1)所计算的平均跳距。
为此,首先,计算跳距误差。
具体而言,先利用锚节点的位置坐标,计算它们间的真实距离,然后再利用式(1)所计算的平均跳距与跳数的乘积估算它们间的距离,最后计算这两者的误差,如式(5)所示利用对Hopsizet进行修正,可得到第二种平均测距值,称为校正平均跳距为了更好地运用跳数分布信息,降低测距误差,引用单跳的平均跳距,即计算第三种跳距方法。
首先,记录所有锚节点间的通信跳数,并依据跳数Hop进行分类,且Hop≤Hopth,最后计算每一类的单跳跳距最后,计算第四种跳距方法。
引用参数估计理论,先计算误差代价函数f1再对式(8)求偏导数,求误差代价函数最小的点。
即=0,可得基于最小均方就误差准则的平均跳距最后,依据不同的跳数值,采用不同的方式计算跳距,即分级计算跳距,如式(10)所示2.3 定位算法在获取了测距值后,便进行位置估计,首先利用泰勒级数扩展建立测距模型[12],如式(11)所示其中,rk表示未知节点离锚节点Ak的距离估计值,而dk(p)表示它们间的真实欧式距离。
nk为测量噪声。
假定锚节点Ak的位置坐标为(xk,yk),而未知节点坐标为(x,y),则dk(p)将dk(p)在初始位置P0=[x0,y0]上进行泰勒级数扩展,如式(13)所示其中将式(13)代入(11),可得其中将式(14)写成最小二乘的形式其中为误差矢量。
而矩阵A最后,可得未知节点θ的估计值其中,W=cov(υ)为矢量υ的协方差矩阵。
2.4 定位算法实现流程首先由锚节点广播信息包,其包含ID号和位置信息。
未知节点接收后,判断是否是第一次接收该数据包,如果是,就保存该数据,并记录离该数据包的跳数值。
否则,就与缓存区内记录的跳数值进行比较,并保存最小跳数值Hop。
然后,分别计算4类平均跳距值,最终依据式(11)进行测距。
再利用泰勒级数扩展的线性最小二乘法估计未知节点的位置,整个流程如图2所示。
利用MATLAB建立仿真平台,分析I-DV-HOP-R-TSE定位性能。
考虑100m×100 m的区域内随机分布150个节点,其中锚节点所占比例为p%。
而节点通信半径为30 m。
每次实验独立重复100次,取平均值作为最终数据。
此外,为了更好地分析I-DV-HOP-R-TSE算法的定位性能,选择传统的DV-Hop定位算法作为参照,并进行比较。
同时,选用归一化的平均定位误差作为性能指标,其定义如式(18)所示其中,N表示未知节点数,而分别表示未知节点的真实位置、估计位置。
而R表示节点通信半径。
3.1 通信半径对归一化的平均定位误差率的影响首先,考查通信半径对归一化的平均定位误差的影响。