燃机控制系统讲义
- 格式:doc
- 大小:182.00 KB
- 文档页数:19
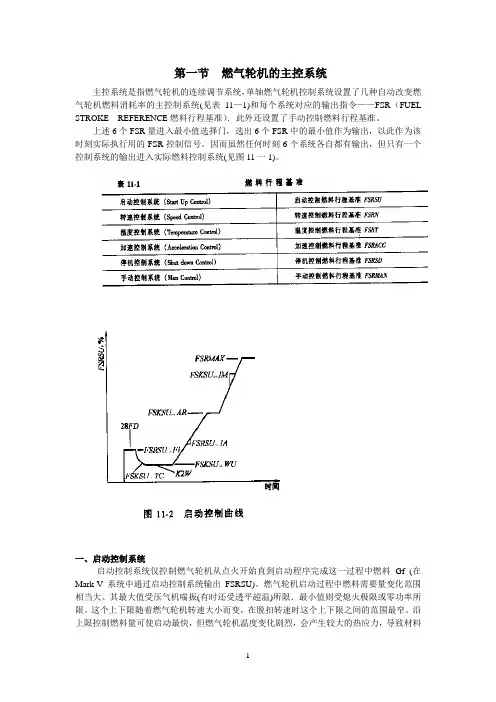
第一节燃气轮机的主控系统主控系统是指燃气轮机的连续调节系统,单轴燃气轮机控制系统设置了几种自动改变燃气轮机燃料消耗率的主控制系统(见表11—1)和每个系统对应的输出指令——FSR(FUEL STROKE REFERENCE燃料行程基准).此外还设置了手动控制燃料行程基准。
上述6个FSR量进入最小值选择门,选出6个FSR中的最小值作为输出,以此作为该时刻实际执行用的FSR控制信号。
因而虽然任何时刻6个系统各自都有输出,但只有一个控制系统的输出进入实际燃料控制系统(见图11一1)。
一、启动控制系统启动控制系统仅控制燃气轮机从点火开始直到启动程序完成这一过程中燃料Gf (在Mark-V系统中通过启动控制系统输出FSRSU)。
燃气轮机启动过程中燃料需要量变化范围相当大。
其最大值受压气机喘振(有时还受透平超温)所限.最小值则受熄火极限或零功率所限。
这个上下限随着燃气轮机转速大小而变,在脱扣转速时这个上下限之间的范围最窄。
沿上限控制燃料量可使启动最快,但燃气轮机温度变化剧烈,会产生较大的热应力,导致材料的热疲劳而缩短使用寿命。
启动控制过程是开环的,根据程序系统来的一组逻辑信号来分段输出预先设置的FSRSU,整个启动控制的过程用图11-2曲线表示。
图11-3则给出了FSRSU的控制算法。
当燃气轮机被启动机带到点火转速(约20%n0 L14HM=1)并满足点火条件L83SUFI=1时,受其控制的伪触点闭合,控制常数FSKSU-F1(典型值为22 .0%FSR)和压气机气流温度系数CQTC(通常为0. 9—1.25)相乘通过NOT MAX最终赋给FSRSU,以建立点火FSR值。
为了点燃火焰并提供燃烧室之间的联焰,在火花塞打火时,点火FSR相对较大。
当下列条件之一满足时,就算作点火成功:①至少两个火焰检测器检测到火焰并超过2s; ②所有4个火焰检测器均检测到火焰。
如果点火成功,控制系统给出L83SUWU=1, L83SU-F1=0。
![[能源化工]燃机三菱控制系统简述.ppt](https://uimg.taocdn.com/529b478b0b4c2e3f56276347.webp)
燃气发电机组控制系统讲座本讲座主要内容包括:发电机组控制系统构建的原因、构建形式及组成部分,并详细介绍了基本控制系统各部分的工作原理及功能,为构建集成化、自动化控制系统做好铺垫,最后提出自动化控制系统的解决方案。
发电机组的控制(屏、箱)系统是机组的配套设备,主要负责机组的控制、调压、配电等,包括自动检测、控制及保护装臵等几大部分功能。
机组是通过控制屏向用电设备进行输配电的,同时操作人员可以从控制屏上直接观察机组的运行状态。
一般小容量机组的励磁调节与控制部分全部集中在控制箱内,直接安装在机组上,例如我公司生产的40GF、60 GF、80 GF、120 GF系列小功率燃气发电机组的控制屏就是采取的这种布局方式;大容量发电机组的控制屏则为落地式,固定在机房的地面或安装在与机组隔离的集中控制室内。
1.小功率燃气发电机组控制系统构建由来燃气发电机组是发动机利用可燃气体作为燃料、带动发电机旋转产生电能的装臵,它由燃气发动机、发电机和控制系统(控制屏)三部分组成,它是一种由燃料内能→发动机动能(与发动机飞轮端轴联的旋转磁极式发电机转子动能)→发电机定子电能的转换装臵。
发动机是机组的动力部分,它由点火系统、燃料供给系统、进排气系统、润滑系统、冷却系统这五大系统构成,发电机由定子、转子、励磁系统等构成。
对于燃气发动机而言,启动方式一般分两种:气动(液压)马达启动和电启动,我们与发电机组配套的发动机最常用的是采用结构紧凑、操作方便、启动转矩大的直流24V(10kW机组为12V)串励直流电动机启动,现在启动系一般采用电动机—发电机系统,发动机多余动力通过整流发电机向蓄电池充电,发动机动力不足时蓄电池向发动机控制系统供电,启动线需从控制系统引出,自身不带电压调节器的充电发电机,需将电压调节器安装在控制箱内。
润滑系的主要任务是供应足够数量的具有适当温度的洁净机油到各摩擦面,减小摩擦损失,减小零件磨损,以保证发动机的动力性、经济性、可靠性和耐久性,发电用的小功率发动机一般为额定转速1500RPM的高速发动机,在运行过程中,曲轴主轴承、连杆大头轴承、凸轮轴承、摇臂轴承、增压器轴承等高速重负荷的摩擦面采用的是压力润滑,这样就需使润滑油压力足够大以保证润滑可靠,因此润滑油压力需作为控制系统的监控对象。

燃机控制系统-MARKVThe Gas Turbine Control System—MARKV浙江省电力设计院陈华东(杭州310007)杭州电力教育培训中心黄红艳(杭州310015)摘要介绍了燃机控制系统—Speedtronic MARKV(TMR)硬件及软件的结构及功能,着重分析了该系统的接口,硬件三冗余及软件容错技术。
关键词燃机 MARKV 三冗余软件容错1引言Speedtronic MARKV是美国GE公司生产的燃气轮机控制系统,该系统可以完成燃机主机及辅机的几乎全部自动化控制功能,该系统由60年代的MARKI发展而来,经历了MARKI、MARKII、MARKII+ITS、MARKIV、MARKV等几个发展阶段。
MARKV系统具有成熟、可靠、安全性能高等优点;其采用的三重冗余硬件结构和软件容错(SIFT)技术是MARKV的显著特点。
2 MARKV的硬件结构及功能2.1总结构图MARKV控制系统的硬件结构如图1所示。
2.2数据接口处理器(I)数据接口处理器(I)的主要功能有:(1)提供人机界面;(2)管理报警信号;(3)传输操作员指令;(4)系统配置和加载;(5)就地维修工作站;(6)与DCS接口。
在由燃机构成的联合循环电厂中,一个MARKV只作为全厂DCS的一个子控制系统,故MARKV必须与DCS进行通讯联系,MARKV提供RS-232和Ethernet两种接口作为选择。
因Ether-net采用目前在世界被广泛采用TCP/IP技术协议,因此,在大型联合循环电厂中,Ethernet这种接口方式被广泛采用。
当采用Ethernet时,(I)的内部结构如图2所示,它实际由(I)、(G)两部分组成,每个(I)、(G)均配有CPU卡、Arcnet卡、显示卡、硬盘、软驱各1个;1个(I)/(G)公用1套CRT、CPD(光标定位装置)、键盘和打印机,通过电子开关(键盘)切换。
(G)配Ethernet卡1块,用于与DCS的通讯。
教科版物理九年《内讲义燃机》优质课件一、教学内容本讲义基于教科版物理九年级教材中《内燃机》章节,详细内容涵盖内燃机的工作原理、类型及应用,重点讨论四冲程内燃机的工作循环,包括进气、压缩、做功和排气四个过程。
二、教学目标1. 让学生理解内燃机的工作原理,掌握四冲程内燃机的工作循环。
2. 培养学生运用物理知识解释实际问题的能力,了解内燃机的应用。
3. 培养学生的实验操作能力,通过实践操作加深对内燃机的理解。
三、教学难点与重点教学难点:四冲程内燃机工作循环的理解,特别是压缩比、热效率等概念。
教学重点:内燃机工作原理,四冲程循环的进气、压缩、做功和排气过程。
四、教具与学具准备1. 教具:内燃机模型,挂图,多媒体教学设备。
2. 学具:实验操作器材,包括小型内燃机模型、测量工具(如温度计、压力计)。
五、教学过程1. 实践情景引入:展示一辆摩托车,引导学生思考摩托车发动机的工作原理。
2. 理论讲解:a. 简介内燃机的概念、类型及应用。
b. 详细讲解四冲程内燃机的工作原理,配合挂图和多媒体动画。
3. 例题讲解:通过例题讲解内燃机工作过程中的能量转换,压缩比、热效率的计算。
4. 随堂练习:让学生完成与内燃机相关的练习题,巩固理论知识。
5. 实验操作:a. 演示内燃机模型的启动、运行和停止。
b. 学生分组操作,观察内燃机工作过程,测量相关数据。
六、板书设计1. 内燃机2. 主要内容:a. 内燃机的概念、类型及应用。
b. 四冲程内燃机工作原理。
c. 内燃机的能量转换、压缩比、热效率。
七、作业设计1. 作业题目:a. 解释内燃机的工作原理,画出四冲程内燃机的工作循环图。
b. 计算给定内燃机的压缩比和热效率。
2. 答案:见附录。
八、课后反思及拓展延伸1. 反思:本节课的教学效果,学生的掌握程度,教学方法的有效性。
2. 拓展延伸:a. 了解内燃机的未来发展,如电动汽车对内燃机的影响。
b. 探究内燃机的排放问题,了解环保型内燃机的原理。
燃机的控制和保护[转载]燃气轮机控制与保护系统包括启动控制系统、调速装置和燃料调节系统、报警保护系统、转速指示器、测量仪表、电源控制等,用来控制、保护、监视燃气轮机的运行状况,并有效控制相关的关键参数(如速度、温度、压力、功率输出等)。
燃机控制一)主要控制1. 启动燃气轮机启动控制系统(包括启动前盘车等)有手动、半自动和自动三种形式。
手动启动要求操作者启动辅助设备并逐步完成启动、清吹、点火等程序,使转子加速到调速器的最小整定转速;半自动启动可以手动启动辅助设备,但操作者应通过一次操作使机组进入全套的启动控制程序,使转子达到调速器的最小整定转速;自动启动仅需操作者通过一次操作即可启动辅助设备并完成燃气轮机进入全套启动控制程序,使转子达到调速器的最小整定转速。
对驱动发电机的机组.三种方式都还应达到同步转速并作好同步并网准备。
2.加负荷可以手动、半自动或自动地给燃气轮机逐渐加负荷,直至达到规定的功率。
自动加负荷可直接跟随自动启动程序完成后进行而不需要再单独进行操作。
对驱动发电机的机组在加负荷前,要求手动或自动操作的方式完成同步并网。
任何一种加负荷方式,均可在一些预定负荷下停留一段时间以达到暖机的要求 3.停机可以用手动、半自动或自动的方式完成。
发电机组的一般性停机操作程序如下:同步转速下,有控制地卸载到零输出;打开电路断路器;降低转速并适当冷机;切断燃料,并将与盘车尤关的辅机停机;如需要则进行盘车;停掉其他辅机,如滑油泵;恢复到启动状态。
机组应具有应急停机的功能,必须同时能手动操纵和由保护系统自动控制。
两种方式均必须能直接关闭燃料截止阀,切断对燃气轮机的燃料供应。
在应急停机时应自动将被驱动的装置与所连接的系统分隔开,接着应进行正常的盘车和停机程序,对装有自动再启动的装置的机组,应采取措施防止不经手动复位就自动再启动. 4.清吹当燃用气体燃料时,在启动过程中(不管是手动或自动启动),启动控制系统一般均应提供足够长时间的自动清吹,使在机组点火之前,燃气轮机内空气置换至少三次,置换空气量为整个排气通道(包括烟筒)容积的三倍。
第一节燃气轮机的主控系统主控系统是指燃气轮机的连续调节系统,单轴燃气轮机控制系统设置了几种自动改变燃气轮机燃料消耗率的主控制系统(见表11—1)和每个系统对应的输出指令——FSR(FUEL STROKE REFERENCE燃料行程基准).此外还设置了手动控制燃料行程基准。
上述6个FSR量进入最小值选择门,选出6个FSR中的最小值作为输出,以此作为该时刻实际执行用的FSR控制信号。
因而虽然任何时刻6个系统各自都有输出,但只有一个控制系统的输出进入实际燃料控制系统(见图11一1)。
一、启动控制系统启动控制系统仅控制燃气轮机从点火开始直到启动程序完成这一过程中燃料Gf (在Mark-V系统中通过启动控制系统输出FSRSU)。
燃气轮机启动过程中燃料需要量变化范围相当大。
其最大值受压气机喘振(有时还受透平超温)所限.最小值则受熄火极限或零功率所限。
这个上下限随着燃气轮机转速大小而变,在脱扣转速时这个上下限之间的范围最窄。
沿上限控制燃料量可使启动最快,但燃气轮机温度变化剧烈,会产生较大的热应力,导致材料的热疲劳而缩短使用寿命。
启动控制过程是开环的,根据程序系统来的一组逻辑信号来分段输出预先设置的FSRSU,整个启动控制的过程用图11-2曲线表示。
图11-3则给出了FSRSU的控制算法。
当燃气轮机被启动机带到点火转速(约20%n0 L14HM=1)并满足点火条件L83SUFI=1时,受其控制的伪触点闭合,控制常数FSKSU-F1(典型值为22 .0%FSR)和压气机气流温度系数CQTC(通常为0. 9—1.25)相乘通过NOT MAX最终赋给FSRSU,以建立点火FSR值。
为了点燃火焰并提供燃烧室之间的联焰,在火花塞打火时,点火FSR相对较大。
当下列条件之一满足时,就算作点火成功:①至少两个火焰检测器检测到火焰并超过2s; ②所有4个火焰检测器均检测到火焰。
如果点火成功,控制系统给出L83SUWU=1, L83SU-F1=0。
允许FSKSU-WU (典型值为10.9%FSR/s)赋给FSRSU,以建立暖机FSR值。
FSR水平的降低是为了减少转子的热应力。
在从点火FSR到暖机FSR的转变过程中.用了一个一阶滤波器,使得过渡过程变得缓和,该滤波器时间常数为FSKSU—TC(典型值1s)。
燃气轮机暖机过程中FSRSU值保持不变,转速则在逐渐上升,实际燃料流量Gf也随之缓慢增加,使处于冷态的燃气气透平逐渐被加热。
一般暖机持续60s结束,由启动程序给出暖机完成逻辑,即L2WX=1。
暖机完成后,程序启动加速逻辑L83SUAR=1。
受其控制的4个伪触点动作,使FSKSU —IA控制常数[典型值为0.05%FSR(s)]作为斜升速率进入积分器的输入端,使得FSRSU 输出在暖机值的基础上逐渐增加。
随着燃油量的增加.燃气轮机转速逐步升高。
控制常数FSKSU一AR(典型值为24。
8%)规定了FSRSU积分斜升的上限值。
一但达到该值.图中上部比较器条件成立,使RISING置1,受控触点动作切断积分器的输入。
FSKSU-AR的常数值通过NOT MAX直接送人下部作为FSRSU输出。
在合闸后L83SUMX置1,又通过积分器输入斜升速率FSKSU-IM(典型值为5%FSR/S).使FSRSU继续上升。
一直斜升到控制常数FSRMAX给定的最大FSR值作为FSRSU输出。
至此启动控制系统自动退出。
逻辑控制算法(未列出)保证L83SUFI、L83SUWU、L83SUAR和L83SUMX在任何时刻都仅有一项可能为“真”.以此保证了有序的输出和对FSRSU的控制。
而且FSRSU输出的变化必须在主保护允许逻辑L4为“真”的条件下才能实现.否则上述所有控制信号为零,FSRSU将直接被箝位于零。
二、转速控制系统转速控制是燃气轮机最基本的控制系统,Mark-V系统有“有差控制”(Droop Speed)与无差控制”(Isoch speed)两种控制方式。
当发电机并网运行时应选用“有差”控制方式。
当发电机单机运行时可选用“无差”控制方式。
这里仅介绍“有差”控制。
有差转速控制简图见图11_4。
有差转速控制算法根据要求的转速基准信号(Speed reference)TNR与实际转速TNH之差,正比例地改变FSR,实现FSRN—FSRNo=(TNR—TNH)×K Droop(11-1)式中FSRN——有差转速控制的输出FSR;FSRN0——燃气轮机在额定转速下空载的FSR值(在这里作为控制常数存人存储单元);图11-4有差转速控制系统原理图K Droop——决定有差转速控制不等率的控制常数(调峰的燃气轮机δ一般取4%)。
式(11-1)用曲线来表示就是有差转速调节静态特性。
当FSRN=FSRN0时,由式(11.1)可知,此时TNH=TNR,即转速基准TNR正好就是空载时的转速TNH。
当FSRN由FSKN。
值变到额定负荷值FSRNB时,转速的变化是额定负荷下的(TNR—TNH),它正好就是有差转速控制的不等率δ。
所以有δ=(FSRNB—FSRN0)/K Droop转速基准TNR信号增减时,静态特性线作上下平移。
若机组尚未并网。
则轮机转速TNH随之变动(此时TNH=TNR)。
若机组已经并网.则TNR变化只改变轮机出力:TNR升.出力就增加;TNR降。
出力就减小。
所以TNR又称为转速负荷基准。
图11—4(b)表示控制转速基准TNR的变化.TNR由中间值选择输出。
TNR的最大值限制是107%。
这保证若δ=4%,即使电网频率高达103%时,机组仍能带满负荷。
若机组要做超速试验,则把此上限改为113%·,以便在空载时燃气轮机可以把转速升高到这个数值。
TNR的最小值限制由逻辑信号来确定。
若L83TNROP=l,则STARTUP(启停值60%)进人中间值选择,作为TNR的下限,这时转速控制就有可能在60%n0起介入启动控制。
运行状态L83TNROP=0,此时OPERATING(运行值95%)输人中间值选择作为TNR的下限,95%的下限可以保证即使电网频率低到95%,仍能通过TNR把轮机负荷降到零。
通常就是图11—4(b)中间的输入通过中间值选择器成为输出的TNR。
图中z-1与加法器组成数字积分器,.L83JDn给出积分速率(L83JDn:n=0,l,2,…,5,相应于不同的速率),L70R和L70L决定积分的方向。
L70R=1、L70 L=0时,积分升高TNR(升转速/负荷);反之积分降低TNR(降转速/负荷);L70R与L70L都为“假”时。
积分中止,TNR保持不变。
当燃气轮机启动程序完成以后,逻辑量L83TRESI=1,则切除积分器,将预置控制的常数PRESET=100. 3%赋给TNR,以备同期并网。
一经并网L83TRESI=0.而TNR则停留在100 .3%(略带负荷,以免电网频率波动造成发电机逆功率)。
以后就可以通过升(或降)TNR 来增(或减)机组出力。
当发电机断路器跳闸时,则L83TRESI置“1”.TNR复位到100. 3%,为下次并网作准备。
三、加速控制系统加速控制系统将转子实际转速信号TNH对时间求导,计算出转子角加速度TNHA,若角加速度实测值超过了给定值TNHAR,则减小加速控制FSR值FSRACC,以减小角加速度,直到该值不大于给定值为止。
若角加速度值小于给定值,则不断增大FSRACC,迫使加速控制系统自动退出控制。
角加速度为正值时就是转速增加的动态过程。
加速控制系统仅限制转速增加的动态过程的加速度,对稳态(静态)不起作用,对减速过程也不起作用。
由此可见加速控制系统其实质是角加速度限制系统。
加速控制系统主要在两种加速过程发挥作用。
(1)在燃气轮机突然甩去负荷后帮助抑制动态超速。
燃气轮机甩去负荷后的过渡过程中,初期转速还未上升多少,FSRN下降也不多,但此时加速度却很大,使FSRACC降得很小,其介人主控系统后就能在此期间快速地降低FSR,减小转子动态超速。
(2)在启动过程中限制轮机的加速率,以减小热部件的热冲击。
前已阐明,启动过程中,暖机完成以后,启动控制系统输出FSRSU,在暖机值FSKSUWU (10. 9%FSR)的基础上以FSKSUIA(0.5%FSR/s)的速率斜升到FSKSUAR(24 .8%FSR)。
然后以更高的速率FSKSUIM(5%FSR/s)继续斜升。
而转速控制系统在启动过程中以TNKRl- 0(9%TNH/min)的速率斜升TNR(直到TNH到达95%)。
转速控制系统输出FSRN为FSRN=(TNR—TNH)×FSKRN2+FSKRN l式中FSKRNl——轮机全速空载FSR值(典型值=14 .7%FSR)。
若TNH完全跟上TNR的变化,则FSRN=FSKRNl。
实际由于转子的惯性。
TNH总是滞后于TNR.因此启动过程中TNH总是大于FSKRN1。
在到达运行转速(95%n0)附近,由FSRSU或FSRN经最小值选择后的FSR可能超过FSRN1不少,因此温度将比空载值高不少,也具有较大的加速度。
而到达运行转速.TNR 启动斜升立即停止。
FSR回到全速空载值,温度相应下降。
此温度变化较剧烈,将造成热冲击。
加入加速度控制则通过限制加速度延缓到达运行转速前的加速过程,间接地抑制了这个过程中的温度上升,缓和了启动结束阶段的温度变化。
加速控制系统控制算法见图11-5.最终经中间值选择门输出FSRACC信号。
它有三个输人:(1)控制常数FSRMAX(100%FSR)——给定的最大极限。
(2)FSRMIN——一个可变的最小极限FSR值。
根据启停过程各个不同阶段所给定的限制曲线,经过压气机进气温度修正系数∞形修正后的输出。
给出最小FSR极限的目的在于防止过渡过程中燃烧室贫油熄火。
(3)通过一系列运算后经加法器的输人。
一般情况下,它就是这三个值的中间值而作为FSRACC输出。
下面专门讨论这个值的由来。
转速信号TNH经微分器和加速基准TNHAR在减法器中相减,其输出为△ω=TNHAR一△TNH/△t在燃气轮机未进人加速控制前,也就是转速的上升速率未超出加速基准TNHAR前其角速度差值△ω>0,那么FSR的差值为正。
即△FSR=FSKACC2×△ω>0使加法器的输出值大于原有FSR值,也就是FSRACC>FSR,从而使得加速控制系统处于退出控制状态。
当燃气轮机加速度大于加速基准TNHAR时,△ω<0,△FSR <0,此时FSRACC<FSR,加速控制系统投入控制,再次把FSR值压低,直到新的△ω等于零为止。
在启动过程中,TNHAR是从一张5个点的对照表中计算出来的(见图11-6和表ll-2),这张表是燃气轮机转速TNH的一个函数。