条件平差算例
- 格式:doc
- 大小:734.50 KB
- 文档页数:23
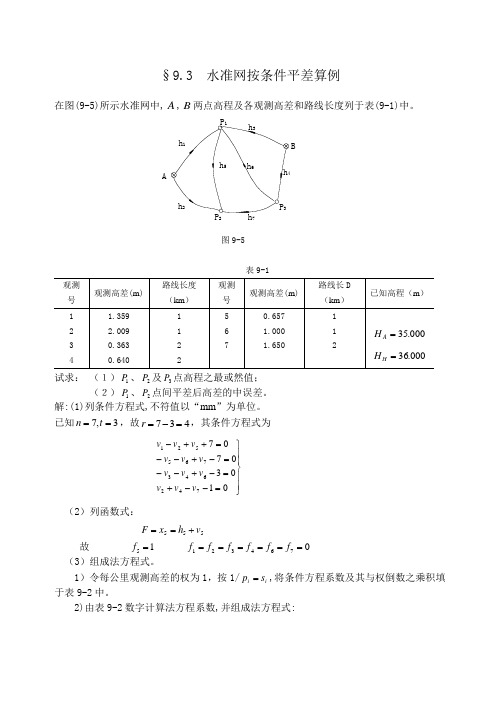
在图 表9-1试求: (1)1P 、2P 及3P 点高程之最或然值; (2)1P 、2P 点间平差后高差的中误差。
解:(1)列条件方程式,不符值以“mm ”为单位。
已知3,7==t n ,故437=-=r ,其条件方程式为⎪⎪⎭⎪⎪⎬⎫=--+=-+--=-+--=++-01030707742643765521v v v v v v v v v v v v(2)列函数式:555v h x F +==故 15=f 0764321======f f f f f f(3)组成法方程式。
1)令每公里观测高差的权为1,按1/i i s p =,将条件方程系数及其与权倒数之乘积填于表9-2中。
2)由表9-2数字计算法方程系数,并组成法方程式:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----------5221251021411013⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡d c b a k k k k +⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---1377=0 表9-2 条件方程系数表(4)法方程式的解算。
1)解算法方程式在表9-3中进行。
2)[]pvv 计算之检核。
[][]wk pvv -= []467.35=-wk由表9-3中解得[]47.35-=pvv ,两者完全一致,证明表中解算无误。
(5)计算观测值改正数及平差值见表9-4。
(6)计算321,,P P P 点高程最或然值。
359.3611=+=x H H A P m 012.3722=+=x H H A P m表9-4 改正数与平差值计算表(7)精度评定。
1)单位权(每公里观测高差)中误差2)21,P P 点间平差后高差中误差mm 0.3447.35±=±=μmmP m FF 2.252.00.31±=±=±=μ。


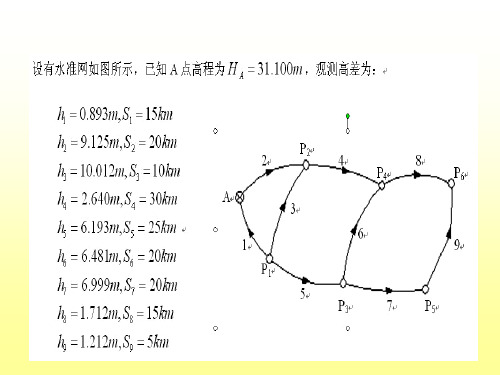

一、水准网条件平差示例 范例:有一水准网(如图8-3所示),已知点A ,B 的高程为: HA=50.000m , HB=40.000 m ,观测高差及路线长度见表8-1。
试用条件平差求:(1) 各观测高差的平差值;(2) 平差后P 1到P 2点间高差的中误差。
图8-3【解】1)、求条件方程个数;由图易知:n=7,t=3,条件式r=4。
故应列4个平差值条件方程,三个闭合环,一个附和路线2)、列平差值条件方程; 所列4个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=-+-=--=-+=+-0ˆˆ0ˆˆˆ0ˆˆˆ0ˆˆˆ31643765521BA H H h h h h h h h h h h h 3)、转换成改正数条件方程;以ii i V L L +=ˆ代入上式可得: ⎪⎪⎭⎪⎪⎬⎫=-+-+-=--+--=-++-+=+-++-00003131643643765765521521B A H H h h v v h h h v v v h h h v v v h h h v v v 化简可得:⎪⎪⎭⎪⎪⎬⎫=--=+--=+-+=++-0403070731643765521mm mm mm mm v v v v v v v v v v v 可知条件方程系数阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----000101010110011100000010011⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2101001000210000210000010000001称对P ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2010010002000020000010000001称对Q ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----=320125100141101300100110001101001100000110010002010102200211000000100114)、组成法方程; 先求权阵P ;以1km 观测高差为单位权观测高差,则: 11=P ,12=P ,213=P ,214=P ,15=P ,16=P ,217=P ,而各观测高差两两相互独立,所以权阵为:,则协因数阵为:则,法方程的系数阵Naa 为:⎥⎥⎦⎤⎢⎢⎣⎡-----⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----==-=00010101011001110000001001120100100020000200000100000010001010101100111000000100111TT AQA T A AP aa N 称对所以,法方程为:043773212510014110134321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----k k k k 5)、解算法方程,求出联系数K⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡34831.213483.002247.177528.2437758427.025843.012360.023596.025843.032584.011236.012360.012360.011236.031461.014607.023596.012360.014608.046067.04377320125100141101314321k k k k 6)、求V 及高差平差值Lˆ 所以4210.212.118.3213.0214.418.214.0ˆ22222220⨯+⨯-+⨯-+⨯-+⨯-+⨯+⨯-==)()()()()(r PV V T σ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡==045.2157.1798.3270.0427.4775.2427.034831.213483.002247.177528.2002001100011020022000001100134831.213483.002247.177528.200001010101100111000000100112010010002000020000010000001m m T K T QA V 称对mmmm v v v v v v v h h h h h h h h h h h h h h L ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=5020.108548.56472.45007.143556.200028.153556.100.22.18.33.04.48.24.0500.10856.5651.4501.14360.20000.15356.10ˆˆˆˆˆˆˆˆ7654321765432176543217)、精度评定1)、单位权方差估值计算mm 98.24605.35±==2)、建立所求精度的平差值函数的算式,并按误差传播律求平差值函数的精度 依题意列平差值函数为: 5ˆh =ϕ 则:[]Tf 0010000=[][][][]51687.048313.01)16853.3146.0(1001111236.001124.016853.03146.0100110011111ˆˆ=-=+-=⨯---=-=-=--TTT T T aaaa N AQf N QA f Qf fQ ϕϕ所以:mm Q 14.251687.098.2ˆˆ0ˆ±=⨯==ϕϕϕσσ【答】:各观测高差的平差值为:}{m m m m m m m5020.108548.56472.45007.143556.200028.153556.10平差后P1到P2点间高差的中误差为:±2.14mm987654321ACPB 图8-11二、测角网条件平差 范例:有一测角网(如图8-11所示),A 、B 、C 三点为已知三角点,P 为待定点。
起算数据及观测数据见表8-4。
试用条件平差求:(1) 各观测角值的平差值;(2) 待定点P 的坐标及其点位中误差; (3) 平差后A 到P 点间边长的相对中误差。
表8-4C C AA1)、求条件方程个数;由图易知:n=9,t=2×1=2,条件式r=7。
故应列7个平差值条件方程,3个三角形条件,1个圆周角条件, 1个极条件及2个固定角条件。
2)、列平差值条件方程; 所列3个三角形条件为: ⎪⎪⎭⎪⎪⎬⎫=︒-++=︒-++=︒-++0180ˆˆˆ0180ˆˆˆ0180ˆˆˆ987654321L L L L L L L L L 1个圆周角条件为:0360ˆˆˆ851=︒-++L L L 1个极条件为:1=⋅⋅PA PC PC PB PB PA ,即1ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin 672493=L L L L L L2个固定角条件为:⎭⎬⎫=∠-+=∠-+0ˆˆ0ˆˆ7342CBA L L BAC L L 3)、转换成改正数条件方程;将1ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin 672493=L L L L L L 线性化得:11sin sin sin sin sin sin 493672997766443322=''--+--++-ρ)(L L L L L L v ctgL v ctgL v ctgL v ctgL v ctgL v ctgL再以ii i V L L +=ˆ代入上面的线性式可得: ⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎬⎫=''--+--++-=--∠-+=--∠-+=---︒-++=---︒-++=---︒-++=---︒-++11sin sin sin sin sin sin 0)(0)(0)360(0)180(0)180(0)180(49367299776644332273734242851851987987654654321321ρ)(L L L L L L v ctgL v ctgL v ctgL v ctgL v ctgL v ctgL L L CBA v v L L BAC v v L L L v v v L L L v v v L L L v v v L L L v v v 化简可得:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫=''++--++-=''-+=''++=''-++=''-++=''+++=''+++033609.2501.1272.2847.1100.1672.105031010702099764327342851987654321v v v v v v v v v v v v v v v v v v v v v v 可知条件方程系数阵和常数项阵为:⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---=609.20501.1272.20847.11000.1672.100010010000001010010010001111000000000111000000000111A , []"----=335131729T W4)、组成法方程;各角值的观测为等精度观测,则权阵及协因数阵为:⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=1010010001000010000010000001称对P ,⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=1010010001000010000010000001称对Q 则,法方程的系数阵Naa 为: T AA T AQA T A AP aaN==-=1⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---=609.20501.1272.20847.11000.1672.100010010000001010010010001111000000000111000000000111T⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---⨯609.20501.1272.20847.11000.1672.100010010000001010010010001111000000000111000000000111⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------=639.21401.0175.00108.1425.0572.0401.020011175.00200110003111108.1101300425.0011030572.0111003所以,法方程为:0335131729639.21401.0175.00108.1425.0572.0401.020*******.00200110003111108.1101300425.0011030572.01110037654321="⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------k k k k k k k 5)、解算法方程,求出联系数K⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----="⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------------------="⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-5864.19442.10212.62217.03451.21895.18696.13351317290483.00200.00115.00037.00257.00095.00052.00200.02083.15952.06015.06106.03961.07979.00115.05952.02028.15991.03939.06023.08012.00037.06015.05991.09003.05020.04993.06996.00257.06106.03939.05020.07137.02950.04972.00095.03961.06023.04993.02950.07019.05010.00052.07979.08012.06996.04972.05010.01006.135131729639.21401.0175.00108.1425.0572.0401.0200101175.00200110003111108.1101300425.0011030572.011100317654321k k k k k k k6)、求V 及高差平差值Lˆ K T A K T QA V ==T⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---=609.20501.1272.20847.11000.1672.100010010000001010010010001111000000000111000000000111"⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----⨯8.11.27.68.40.18.77.12.51.25864.19442.10212.62217.03451.21895.18696.1 则:⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡'''︒'''︒'''︒'''︒'''︒'''︒'''︒'''︒'''︒=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡'''︒'''︒'''︒'''︒'''︒'''︒'''︒'''︒'''︒=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡="2.2385201.40021257.5604338.1554230.40841272.0462283.3861428.4125309.39051068.11.27.68.40.18.77.12.51.2528520830212505043311542393841272162280461427425302405106ˆˆˆˆˆˆˆˆˆˆ987654321987654321987654321v v v v v v v v v L L L L L L L L L L L L L L L L L L L7)、待求点坐标计算;可根据B 、A 两已知点及角3和角2的平差值,按照前方交会定点的方法计算出待求点P 的坐标。