自动控制原理实验报告时域分析法2
- 格式:doc
- 大小:644.50 KB
- 文档页数:8

实验二 线性系统时域响应分析一、实验目的1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。
2.通过响应曲线观测特征参量ζ和n ω对二阶系统性能的影响。
二、基础知识及MATLAB 函数(一)基础知识时域分析法直接在时间域中对系统进行分析,可以提供系统时间响应的全部信息,具有直观、准确的特点。
为了研究控制系统的时域特性,经常采用瞬态响应(如阶跃响应、脉冲响应和斜坡响应)。
本次实验从分析系统的性能指标出发,给出了在MATLAB 环境下获取系统时域响应和分析系统的动态性能和稳态性能的方法。
用MATLAB 求系统的瞬态响应时,将传递函数的分子、分母多项式的系数分别以s 的降幂排列写为两个数组num 、den 。
由于控制系统分子的阶次m 一般小于其分母的阶次n ,所以num 中的数组元素与分子多项式系数之间自右向左逐次对齐,不足部分用零补齐,缺项系数也用零补上。
1.用MATLAB 求控制系统的瞬态响应1)阶跃响应 求系统阶跃响应的指令有:step(num,den) 时间向量t 的范围由软件自动设定,阶跃响应曲线随即绘出step(num,den,t) 时间向量t 的范围可以由人工给定(例如t=0:0.1:10)[y ,x]=step(num,den) 返回变量y 为输出向量,x 为状态向量在MATLAB 程序中,先定义num,den 数组,并调用上述指令,即可生成单位阶跃输入信号下的阶跃响应曲线图。
考虑下列系统:25425)()(2++=s s s R s C 该系统可以表示为两个数组,每一个数组由相应的多项式系数组成,并且以s的降幂排列。
则MATLAB 的调用语句:num=[0 0 25]; %定义分子多项式 den=[1 4 25]; %定义分母多项式step(num,den) %调用阶跃响应函数求取单位阶跃响应曲线grid %画网格标度线 xlabel(‘t/s’),ylabel(‘c(t)’) %给坐标轴加上说明 title(‘Unit -step Respinse of G(s)=25/(s^2+4s+25)’) %给图形加上标题名 则该单位阶跃响应曲线如图2-1所示:为了在图形屏幕上书写文本,可以用text 命令在图上的任何位置加标注。

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
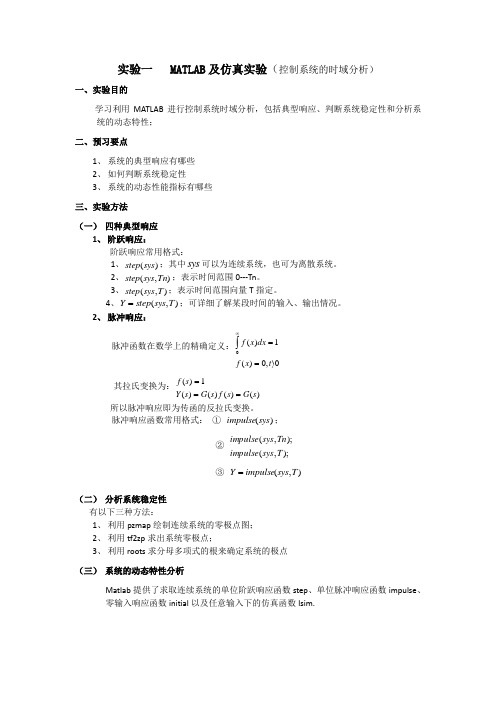
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。

系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:典型系统的时域响应和稳定性分析实验时间:学生成绩:教师签名:批改时间:一、目的要求1.研究二阶系统的特征参量 (ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉 Routh 判据,用 Routh 判据对三阶系统进行稳定性分析。
二、实验设备PC机一台,TD—ACC教学实验系统一套三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图 1.2-1 所示。
图1.2-2(2) 对应的模拟电路图:如图 1.2-2 所示。
图1.2-2系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:(3) 理论分析系统开环传递函数为:;开环增益:(4) 实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻 R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中(图 1.2-2),系统闭环传递函数为:其中自然振荡角频率:2.典型的三阶系统稳定性分析(1) 结构框图:如图 1.2-3 所示。
系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:图 1.2-3(2)模拟电路图:如图1.2-4 所示。
图 1.2-4(3)理论分析:系统的特征方程为:(4)实验内容:实验前由Routh 判断得Routh 行列式为:系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:为了保证系统稳定,第一列各值应为正数,所以有五、实验步骤1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。
由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。


目录一、根本概念 (2)二、梅森增益公式 (4)三、典型信号的时域分析 (4)四、劳斯稳定判据判定系统的稳定性 (7)五、静态误差系数 (7)六、根轨迹分析法 (8)一、根本概念1、根本限制方式①反应限制系统〔闭环限制系统〕②开环限制系统〔按给定限制、按扰动限制〕③复合限制系统〔闭环限制+按扰动方式的开环限制〕2、线性定常连续系统4〃“〃一】d m他清〔必…+/削=为而刈+4萨«,〕+…+•〕3、线性定常离散系统(/〃4〃)a()c(k + 〃)+?<・(女+ “ ― 1)+・・• + 〃〃_/,(& + \)+a n c(k) =b0r(k + m) + b、r(k + m - 1) + …+ 鬃_/(女 + D + b“j(k)4、拉普拉斯变换及其性质尸(s)=4r(f)]=1/(»—一①线性性质E(s)=山、3]鸟(s)=山'/)]胭.)+ 妨(,)]=丽10 )] + bl\fl Q )]=*(s) + bF2 (s)②微分定理F(5)= £[/(/)]L誓=5F(5)-/(0)4^^]=『尸($)-回(.)+广(.)]£[^?] ='/⑸一卜T/(0)+ $""r(°)+ …+ /(,,-,)(0)]③积分定理F(5)=L[/G)]S S如/(“丽=/()!"⑻」严⑻S S S小]7(“,〃H=y(s)T/叫"叫.)④初值定理/(0+) = lim /(/) = lim sF(s)⑤终值定理理〃)=吧犷⑸⑥位移定理F (5)= £[/(/)]且%-%)] =产/⑸⑺]—4)⑦相似定理尸⑸=力(川L /(' ="(〃$)⑧卷积定理K(S )= L 伉⑹居⑸=山2⑹F {(5)/s (5)=/;(r-T )f 2(T )dT =L £/1(r)/2(/-r )6/r f\⑺* f?a )= [fl= £ /(r)/2(r -r)dt⑨常用拉氏变换 5、传递函数及其性质 c 、— C(s) _ %婢 +『+ …+ 仆 + b m _M ⑸Cr( 5 )= --- = ------------- : -------------- = ------R(s) 3〃 +q[T + ...+(_]$+% N(s)性质:①分母阶次高,小工〃且所有系数为实数②只取决于系统或元件的结构和参数/(/一70)1(,-70) 叭t) f ⑴ t eRfS 演,) 10)t〃T(…! 厂sin cotcoscotf'lef'F")," >0_dF(s)ds[F{s}dsF(s + a)1s 1 """7 “ 1 s" 1 s + a co -5 T s" +少 s -5 r s- + izr ] (s + 〃)"③零初始条件时不可约分二、梅森增益公式1 〞p=Rg 八I-]La:单独回路增益:L h L e:每两个互不接触回路增益乘积;L d L e L f:每三个互不接触回路增益乘枳;P:系统总传递函数:n:前向通路总条数;仆:第k条前向通路总增益:△: 特征式;A&:特征式的余子式,即特征式中去掉与第k条前向通路相接触的回路增益项(包括回路增益的乘积项)后的余子式.三、典型信号的时域分析1、时域分析法典型输入信号单位阶跃r(/) = l(r),r>0 R(s) = \/s单位斜坡r(r) = r,r>0 R(s) = l//单位加速度r(0 = r2/2,r>0 R(s) = l/d 单位脉冲r(f) = 0(f)J = O R(s) = 1正弦函数= Asin cot R(s)= f,s +co~ ①动态过程(过渡过程或瞬态过程)在典型输入信号作用下,系统输出量从初始状态到最终状态的响应过程②稳态过程(稳态响应) 在典型输入作用下,当8时的系统输出它表征系统输出最终复现输入量的程度,用稳态性能指标描述③动态指标在阶跃输入作用下,测定或计算系统的动态性能回上升时间/,:振荡一一第一次上升到终值所需时间非振荡一一从终值的10%上升到终值的90%所需的时间例延迟时间.:第一次到达其终值的一半所需的时间回峰值时间超过其终值后,到达第一个峰值所需的时间回调行时间?:到达并保持在终值±5%终值(或±2%)内所需的最短时间xlOO%回超调量b/?(s)假设也)那么响应无超调t r (t p )一评价系统起始段的响应速度bp一评价系统的阻尼程度4—评价系统整个过渡过程的响应速度,是速度和阻尼程度的综合指标④稳态指标描述系统稳态性能的一种性能指标通常在典型输入作用下进行测定或计算单位阶跃输入下的稳态误差也称余差注意:性能指标是就稳定系统而言的2、典型一阶系统传递函数.(s) =」一Ts+\1 1 1 T①一阶系统单位阶跃响应:C(5)=.⑸R(s)= ——•一 =————Ts + \s s Ts+\拉氏反变换,得:c(t) = \-e~ t>0 阶跃响应得特点:i、在t=o时斜率最大,为:-ii、动态性能与时间常数T有关,其指标为:t d =0.697 t r = 2.20T (= 37(5% 误差带)(=47(2% 误差带)iii、c(f)的终值为1,即系统在阶跃愉入作用下,稳态误差为零②一阶系统的单位脉冲响应:1g(t) = r}\G(s)]=-e /响应曲线的斜率在t=0时最大,为-5,在t=0处的切线交时间轴于点(7,0) ③一阶系统的单位斜坡响应:一阶系统跟踪单位斜坡信号的稳态误差为:= lim e(t) = T-8c Ji Y 尸6 = arc tan--1— = arc co 啰c«〕的初始斜率为03、标准二阶系统微分方程 [«) + 2血/") +淳⑺=吟⑺标准二阶系统闭环传递函数.($)= C(s) _ * R(s) s 2 +2的卢 + q : % —自然频率〔无阻尼自然振荡频率〕0 一阻尼比〔相对阻尼系数〕标准二阶系统开环传递函数 G 〔s 〕 = -一一- s 〔s + 2血〕2、欠阻尼二阶系统的单位阶跃响应欠阻尼:0<4<1闭环特征根:>2 =一8〃 ±4 J1-照=-b± jco d其中:b = #y 〃一衰减系数%=4 万一阻尼振荡频率单位阶跃作用下其输出C(s)=.⑸~ s)=可; c(1) = h(t) = 1-1 sin (0/ + 6)上升时间t r=—=~^L=峰值时间/ =—=—£—「叫叫卡调节时间4=卫=兰〔5%的误差带〕血 ..=±1 =出〔2%的误差带〕血 b延迟时间.1匕22£-G、寸万! kb hi(l/b )、k + In ~ bp J/ +(lnl/b〃)2振荡次数N = £ =①?=叼泡二不T a 2乃四、劳斯稳定判据判定系统的稳定性1、如果在扰动消失后,系统仍能自动恢复到原平衡状态,称系统是稳定的.稳定是限制系统能够正常运行的首要条件.对系统进行各类品质指标的分析也必须在系统稳定的前提下进行.在经典限制理论中,临界稳定也归为不稳定.2、设n阶系统的特征方程为£〕〔5〕= a Q s H +6s' - + ・・・ + + a n = 0生=-i> 氏=〔-i〕〞rp, a. /=! "o i=i限制系统稳定的必要条件是各项系数全都大于零.3、劳斯稳定判据的结论:系统稳定O劳斯表的第一列系数全部大于零,而且,劳斯表中第一列元素符号改变次数就等于正实部根的个数.4、劳斯表中某行第一个元素等于零,而该行不全为零,处理方法:以很小的正数,代替零项,继续计算劳斯表,再令£ .0,检查劳斯表第一列元素符号的变化,符号变化次数为正实部根的个数,系统不稳定.5、劳斯表中出现了全零行,处理方法:①用全零行的上一行各元素构造辅助多项式②对辅助多项式求导,用其系数代替全零行,继续算完劳斯表③检验劳斯表第一列元素符号的变化,符号变化次数为正实部根的个数,系统不稳定.假设想进一步了解导致系统不稳定的根的情况,可以求解辅助方程,辅助方程的根也是系统的特征根.五、静态误差系数6、设系统的开环传递函数为m攵口(3 + 1)G(s)“(s) = ^ ------------------s'TI/s + l) j=l定义:开环传递函数包含积分环节.的个数〃称为系统的型别(类型)7、稳态误差和静态误差系数①阶跃输入B) = &1 ⑴ R(s) = & S sR(s) & R()e<c = Inn ---------------- = ---------------------- = ----- ---J.1 + G(s)〞(s) l + limG(s)〞(s) \ + K nK,:静态位置误差系数②斜坡输入«) = % R(s) = / 5_1. sR(s) V o r匕匕= lim ---------------- = lim ---------- - ------ = hm --------------- =——D l + G(s)H(s) io s + sG(s)H(s) -.sG⑸"(s) K vK、:静态速度误差系数③加速度输入«) =、" R") =牛2 si* .s/?( .S ) .. % .. 为40e, = lim ----------------- = lun —----- ; ---------- = lim - -------------- =——-.1 + G(s)〞(s) a./ +s-G(s)〞(s) -.s-G(s)〞(s) K a静态加速度误差系数六、根轨迹分析法1、根轨迹定义:当开环系统的某一参数从零到无穷变化时,闭环特征根在s平而上形成的轨迹,叫做根轨迹.根轨迹绘制的两个根本条件/ri"-?.i=l立(S-Pj) 月m /n 卜-zji=ln=-H 口卜-六i=int n)-〃j=(2A + l).180°沁i j=ik = 0,±l,±2,…/w n 、ZN 〔s-Z f 〕-ZN 〔s-P ,〕=2人 180,J=i 六 i 说明: ①判断根轨迹是00根轨迹还是180°根轨迹,不能仅看反应极性,还要看G 〔s 〕〞〔s 〕是否 为标准形式,当G 〔s 〕〞〔s 〕不是标准形式时,应先整理特征方程.②相角条件是绘制根轨迹的充要条件,模值条件通常用于求给定点对应的增益. 2、根轨迹绘制的根本法那么mk“n 〔s-z,〕适用条件:特征方程可整理为i+T --------------- = o,且/从0f8变化n 〔s-Pj 〕六11、根轨迹的分支数="4穴〃,6〕,通常情况下为开环极点个数心2、根轨迹的每一条分支都是连续的,根轨迹对称于实轴.3、根轨迹的起点和终点:根轨迹起始于n 个开环极点,终止于m 个开环零点,当〃7工〃时, _ .. . nn [当〃 > 〃7时,另"-"7条根轨迹终止于S 处用S f30补充,即:当〃7 >九时,另〃7 - 〃条根轨迹起始于S 处4、当〃〉加时,有〃-阳条根轨迹趋于无穷远处,即有〃-〃7条渐近线,他们交实轴于%, 与实轴正方向之夹角为先,且〔2^ + 1〕-180° …S〔P a = ,其中女=0,±1,±2「・n - m 规律是:渐近线把复平面等分为〃-〃?份.5、实轴上的开环零点、极点把实轴分为假设干个区段,假设某段右边的开环零、极点数目之和 为奇数,那么该段就是根轨迹,否那么不是.6、重根点、别离角、会合角〃 1 1重根点坐标d 满足方程z --------- =y — 〔假设没有零点那么右边等于0〕六]d - Pj /=i d - Zj假设从中解出的d 在根轨迹上〔即满足相角条件〕,那么d 是重根点,否那么舍去,根轨迹的别离 角和会合角给出的就是根轨迹离开重根点和进入重根点的方向.共同平分360..计算重根点,还有另一种方法:先从特征方程解出再由公式a =0,用这个公式 小L=dm /口" 一号〕 i=l六 1 k = 0,±l,±2,•-n tn b =2d ________ n - m解出的d也需要进一步验证其是否满足相角条件. 7、假设根轨迹与虚轴有交点,其交点坐标可由如下两种方法得到方法1、把$ = /0带入特征方程,实部、虚局部别等于0,联立解出相应的/和刃.k*为临界根轨迹增益,3为交点坐标.方法2、应用Routh判据,当出现纯虚根时,会出现全为0的行,解由其上一行元素构造的辅助方程,可得交点坐标和临界增益.8、根轨迹的起始角和终止角,p.的起始角斗,, Z.的终止角8、n m%=〔2k + l〕・180.—Z4Pa-P,〕+ Z4Paf〕 r-1 f-1rxn < m ii% =〔2k + l〕480.—Z4q/〕+ Z4z「P,〕 f-1 /-I公式中的P.〔Z fl〕都是单开环极点〔零点〕下推出的,假设P〞〔Z fl〕是重的开环极点〔零点〕,那么公式的右边应除以相应的重数.9、当"一"7 2 2时,无论k〞为何值,都有£〔闭环极点的重心〕,即,闭环极点之和等于开环极点之和.3、归纳180°根轨迹的绘制①写出m=? , n=?各开环零点,开环极点是多少,并把它们标在图上②写出实轴上存在根轨迹的区段,并把他们标在图上③当时,求出渐近线的倾角及与实轴的交点,并把它们标在图上④求重根点当然并非所有的根轨迹都存在重根点,如果能明确肯定不存在时也可不求⑤当有复数的开环极点时,应计算起始角〔出射角〕当有复数的开环零点时,应计算终止角〔入射角〕⑥当根轨迹与虚轴有交点时,求出交点坐标和相应的增益值⑦概略绘出根轨迹图,绘制过程中要注意到是连续且对称于实轴当〃-"?22时,如果有一些根轨迹分支向左,那么必有另一些根轨迹分支向右.4、参量根轨迹通常是指增益以外的其他变量变化所对应的根轨迹.。
自动控制原理实验报告实验名称:基于MATLAB的线性系统的时域分析院(系):电子科学与工程姓名:何艳康学号:06008337同组人员:蔡秋顺实验时间:2010年11月18日实验二 基于MATLAB 的线性系统的时域分析一、 实验目的:1. 观察学习控制系统的时域(阶跃、脉冲、斜坡)响应;2. 记录时域响应曲线;给出时域指标;3. 掌握时域响应分析的一般方法。
二、 实验内容:1、 二阶系统为10/();计算系统的闭环根、阻尼比、无阻尼振荡频率并做记录。
计算实际测取的峰值大小Cmax (tp )、峰值时间tp 、过渡时间ts 并与理论值比较。
2、 试作出以下系统的阶跃响应,并比较与原系统响应曲线的差别与特点,做出相应的实验分析结果。
(a ) H1(s )=(2s+1)/(2210s s ++),有系统零点情况。
(b ) H2(s )=(20.5s +)/2(210)s s ++,分子、分母多项式阶数相等。
(c ) H3(s )=s/2(210)s s ++,分子多项式零次项系数为零。
3、 判断3265432316411411052814942117112s s s s s s s s s ++++++++的稳定性并计算稳态误差。
三、 实验结果:1、 程序:clc; clear; num=[10]; den=[1,2,10];r=roots(den)%闭环根;[w,z]=damp(den)% w 为无阻尼震荡频率,z 是阻尼比; [y,x,t]=step(num,den); plot(t,y)%阶跃响应;finalvalue=dcgain(num,den)%稳态值; [Cmax,n]=max(y)%峰值;Mp=100*(Cmax-finalvalue)/finalvalue%超调量; tp=t(n)%峰值时间; n=1;while y(n)<0.1*finalvalue n=n+1; end m=1;while y(m)<0.9*finalvaluem=m+1;endrisetime=t(m)-t(n);k=length(t);while (y(k)>0.98*finalvalue)&(y(k)<1.02*finalvalue)k=k-1;endts=t(k)%过渡时间;实验结果:闭环根:r1=-1.0000+3.0000ir2=-1.0000-3.0000i阻尼比:ζ=0.3162无阻尼振荡频率:ωn=3.1623由上可知:ζ=0.3162,0<ζ<1,即统为欠阻尼系统,无阻尼振荡频率ωn=3.1623,则阻尼振荡频率为ωd=ωn=3;理论计算:峰值大小Cmax(tp)=1+Mp=1+ =1.332理论峰值时间计算tp=π/ωd=1.047s在±2%误差宽度时,理论过渡时间估算ts=4/ζωn=4s时间的实验值和理论值的误差较大,因为理论计算是有估算的来的,而实际影响调节时间的各个因素和变量较多,实际的理论计算方法要比较复杂。
实验二 控制系统稳定性分析和时域响应分析一、实验目的与要求1、熟悉系统稳定性的Matlab 直接判定方法和图形化判定方法;2、掌握如何使用Matlab 进行控制系统的动态性能指标分析;3、掌握如何使用Matlab 进行控制系统的稳态性能指标分析。
二、实验类型设计三、实验原理及说明1. 稳定性分析 1)系统稳定的概念经典控制分析中,关于线性定常系统稳定性的概念是:若控制系统在初始条件和扰动共同作用下,其瞬态响应随时间的推移而逐渐衰减并趋于原点(原平衡工作点),则称该系统是稳定的,反之,如果控制系统受到扰动作用后,其瞬态响应随时间的推移而发散,输出呈持续震荡过程,或者输出无限偏离平衡状态,则称该系统是不稳定的。
2)系统特征多项式以线性连续系统为例,设其闭环传递函数为nn n n mm m m a s a s a s a b s b s b s b s D s M s ++++++++==----11101110......)()()(φ 式中,n n n n a s a s a s a s D ++++=--1110...)(称为系统特征多项式;0...)(1110=++++=--n n n n a s a s a s a s D 为系统特征方程。
3)系统稳定的判定对于线性连续系统,其稳定的充分必要条件是:描述该系统的微分方程的特征方程具有负实部,即全部根在左半复平面内,或者说系统的闭环传递函数的极点均位于左半s 平面内。
对于线性离散系统,其稳定的充分必要条件是:如果闭环系统的特征方程根或者闭环传递函数的极点为n λλλ,...,21,则当所有特征根的模都小于1时,即),...2,1(1n i i =<λ,该线性离散系统是稳定的,如果模的值大于1时,则该线性离散系统是不稳定的。
4)常用判定语句2.动态性能指标分析系统的单位阶跃响应不仅完整反映了系统的动态特性,而且反映了系统在单位阶跃信号输入下的稳定状态。
自动控制原理实验报告实验一、典型环节的时域响应一.实验目的1.熟悉并掌握TD-ACC+(TD-ACS)设备的使用方法及各典型环节模拟控制电路的构成方法。
2.熟悉各种典型环节的理想阶跃曲线和实际阶跃响应曲线。
对比差异、分析原因。
3.了解参数变化对典型环节动态特性的影响。
二.实验设备PC机一台,TD-ACC+(TD-ACS)实验系统一套。
三.实验内容1.比例环节2.积分环节3.比例积分环节4.惯性环节5.比例微分环节6.比例积分微分环节四、实验感想在本次实验后,我了解了典型环节的时域响应方面的知识,并且通过实践,实现了时域响应相关的操作,感受到了实验成功的喜悦。
实验二、线性系统的矫正一、目的要求1.掌握系统校正的方法,重点了解串联校正。
2.根据期望的时域性能指标推导出二阶系统的串联校正环节的传递函数二、仪器设备PC 机一台,TD-ACC+(或 TD-ACS)教学实验系统一套。
三、原理简述所谓校正就是指在使系统特性发生变接方式,可分为:馈回路之内采用的测点之后和放1.原系统的结构框图及性能指标对应的模拟电路图2.期望校正后系统的性能指标3.串联校正环节的理论推导四、实验现象分析校正前:校正后:校正前:校正后:六、实验心得次实验让我进一步熟悉了TD-ACC+实验系统的使用,进一步学习了虚拟仪器,更加深入地学习了自动控制原理,更加牢固地掌握了相关理论知识,激发了我理论学习的兴趣。
实验三、线性系统的频率响应分析一、实验目的1.掌握波特图的绘制方法及由波特图来确定系统开环传函。
2.掌握实验方法测量系统的波特图。
二、实验设备PC机一台,TD-ACC+系列教学实验系统一套。
三、实验原理及内容(一)实验原理1.频率特性当输入正弦信号时,线性系统的稳态响应具有随频率(ω由0变至∞)而变化的特性。
频率响应法的基本思想是:尽管控制系统的输入信号不是正弦函数,而是其它形式的周期函数或非周期函数,但是,实际上的周期信号,都能满足狄利克莱条件,可以用富氏级数展开为各种谐波分量;而非周期信号也可以使用富氏积分表示为连续的频谱函数。
系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:典型系统的时域响应和稳定性分析实验时间:学生成绩:教师签名:批改时间:一、目的要求1.研究二阶系统的特征参量 (ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉 Routh 判据,用 Routh 判据对三阶系统进行稳定性分析。
二、实验设备PC机一台,TD—ACC教学实验系统一套三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图 1.2-1 所示。
图1.2-2(2) 对应的模拟电路图:如图 1.2-2 所示。
图1.2-2系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:(3) 理论分析系统开环传递函数为:;开环增益:(4) 实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻 R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中(图 1.2-2),系统闭环传递函数为:其中自然振荡角频率:2.典型的三阶系统稳定性分析(1) 结构框图:如图 1.2-3 所示。
系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:图 1.2-3(2)模拟电路图:如图 1.2-4 所示。
图 1.2-4(3)理论分析:系统的特征方程为:(4)实验内容:实验前由 Routh 判断得 Routh 行列式为:系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:为了保证系统稳定,第一列各值应为正数,所以有五、实验步骤1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。
由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。
自z ì动d òng 控k òng 制zh ì原yu án 理l ǐ实sh í验y àn 报
b ào
告g ào
——之zh ī时sh í域y ù分f ēn 析x ī法f ǎ2èr
(运行环境:MATLAB 6.5)
班级:200715w1 学号:20073558
PID 控制作用
●熟悉典型环节
●组合典型环节按题完成相应曲线
●已知开环传递函数如下,采用PID控制器,使得控制系统
的性能达到最优
Gk=1/(s+4)s(s+2)
●如下图所示的系统,请调节PID参数,使是系统的输出状
态达到最优
相关PID知识
PID控制规律:比例、积分、微分规律。
用P表示比例,
用I表示积分,用D表示微分。
P控制(比例):其作用为最基本的负反馈控制作用。
当
Kp越大,即越小,将使比例控制作用增
强,系统稳态误差变小,控制周期缩短,
抗干扰能力减弱,系统稳定性变差。
I控制(积分): 其作用是消除稳态偏差,偏差不为零积
分不停止,Ti越大,积分愈慢。
无差系
统必有积分环节,或在控制器中或在被
控过程中。
I作用将使误差趋于零,但使
系统稳定性变差。
易震荡。
D控制(微分):抑制动态偏差。
因为与偏差的导数成正
比,所以偏差变化D作用越强。
而偏差
不变时,D作用为零。
D作用有预测含义,
有利于系统稳定性。
衰减曲线经验公式法
Ts:出现4:1衰减比时,第一个波峰到达第二个波峰所需的时间
积分时间:Ti=0.3Ts
微分时间:Td=0.1Ts
典型环节的特性
五、实验过程
第一题
第一步:建模。
首先加入PID控制器的系统模型。
Transfer fcn对应积分环节,transfer fcn1对应微分环节。
对应图如下
在未加 PID控制器的情况下,获取输出波形如下:
图中,稳态误差较大,非理想
状态
第二步:整定。
首先令积分环节和微分环节不发生作用,单独调节比例参数,大约在k=18.44的时候,出现了所谓的4:1的衰减
比。
获取输出波形如下:
易得Ts=3.5,则Ti=1.05,
Td=0.35
然后直接设定积分和微分环节的相关参数。
第三步:微调,直到达到最佳状态。
第四步:结果分析。
稳态误差为0,超调量为4%左右。
接近理想系统的输出状态
及最终Simulink图如下:
第二题
第一步:在原系统中,获取输出波形如下:
图中,稳态误差较大,非理
想状态
第二步:整定。
首先令积分环节和微分环节不发生作用,单独调节比例参数,大约在k=0.14的时候,出现了所谓的4:1的衰减
比。
获取输出波形如下:
第三步:微调,直到达到最佳状态。
第四步:结果分析。
稳态误差为0,超调量为4%左右。
接近理想系统的输出状态
及最终Simulink图如下
此类试验再次上手时,仍不知所措。
瞎鼓捣了半天,二阶震荡环节也没出现,更不用说传说中的4:1的震荡衰减率。
仔细复习了一下实验书上的PID,汗!做此类题是有顺序步骤的。
而且,Ti、Td的值是由Ts算出的,而并不是瞎凑凑,再拼拼人品就能搞出来的。
第一题中,先调节k的值,使二阶震荡环节出现并产生传说中的4:1,这样第一步就完成了。
随后查看并记录下衰减周期Ts,之后就可以算出Td和Ti了。
直接代入积分和微分环节,再实行微调,稳态误差为0,超调量为4%的系统就出现了。
第二题中,与第一题情形相类似,就不重复讲了。
小结结束了。