三轴磁传感器快速标定方法研究
- 格式:doc
- 大小:1.86 MB
- 文档页数:9
三轴MEMS陀螺仪标定方法研究摘要 MEMS陀螺仪作为低成本惯性测量单元在载体姿态监测与导航控制中有着广泛应用。
根据三轴光纤陀螺仪标定的数学模型,设计了三轴MEMS陀螺仪标定的数学模型及标定实验;介绍了数学模型中陀螺仪标度因数、安装误差系数以及固定常值漂移的计算与处理方法。
理论分析与实验结果表明:该标定方法原理简单、易于实现,且标定结果精度高,标定后的解算矩阵可为后续姿态解算和导航控制提供较为准确的量测数据。
关键词三轴MEMS陀螺仪;安装误差标定;误差补偿0 引言传统磁罗盘主要由三轴加速度计和三轴磁力计构成(也称为六轴磁罗盘),三轴加速度计主要用于测量地球重力加速度,根据所测得的数据,求解载体的俯仰角和横滚角,利用求出的俯仰角和横滚角,同时结合三轴磁力计测得的地磁场数据,求解出载体的磁方位角[1]。
当载体处于准静态(静止或匀速运动)时,三轴加速度计可准确测量地球重力加速度,从而准确求解出载体姿态角。
当载体处于动态时,三轴加速度计除了测量地球重力加速度外,还会测得载体自身所产生的加速度,导致姿态角计算不准。
因此,六轴磁罗盘只能准确测量准静态下载体的姿态角,而无法用于动态条件时载体姿态角的准确测量。
但在实际应用中,大多数载体都是处于动态,由于载体运动对陀螺仪的影响较小,利用这一特性可以解决动态条件下载体姿态角精确测量问题[2]。
近年来,随着MEMS陀螺仪技术的发展,MEMS陀螺仪技术水平已取得了长足的进步,将三轴MEMS陀螺仪集成到传统磁罗盘中构成九轴磁罗盘(AHRS)已成为现实[3]。
然而,三轴MEMS陀螺仪由于存在固定常值漂移、安装误差、标度因数误差等会直接影响九轴磁罗盘姿态计算[4],因此在使用三轴MEMS陀螺仪之前对其进行精确的标定过程是非常必要的。
1 陀螺仪标定原理MEMS陀螺仪对姿态误差产生直接影响,其主要表现是MEMS陀螺仪固定常值漂移、陀螺仪的安装误差对捷联惯导系统的姿态误差的影响[5]。
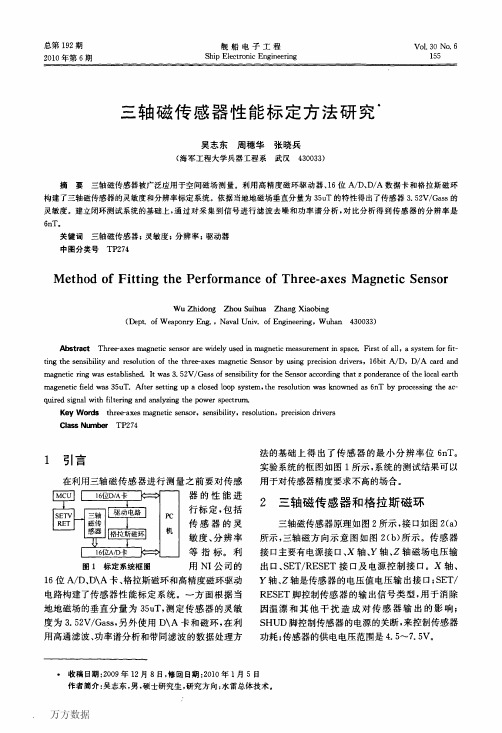



三轴磁传感器系统的在线标定盛蔚;蒋勇【摘要】现有的三轴磁传感器的标定方法对于设备的要求过高,系统不能够独立完成标定工作.针对此种情况,提出三轴磁传感器系统的在线标定算法,建立三轴磁传感器系统误差模型,采用椭球曲面拟合三轴磁场数据,利用递推法计算标定参数.达成了传感器系统本身在线独立完成标定的目的,并对在线标定参数的可信度提出了评价方法.通过实验验证了在线标定方法的有效性和在线标定参数可信度评价方法的有效性.【期刊名称】《弹箭与制导学报》【年(卷),期】2015(035)003【总页数】4页(P179-182)【关键词】磁传感器;在线标定;椭球拟合;递推最小二乘法【作者】盛蔚;蒋勇【作者单位】北京航空航天大学仪器科学与光电工程学院,北京100191;北京航空航天大学仪器科学与光电工程学院,北京100191【正文语种】中文【中图分类】V241.61三轴磁传感器系统是用来测量地球磁场在载体坐标系下三轴磁场分量大小的传感器系统。
既可以与加速度计信息组合起来计算载体姿态[1],又可以当作测量磁场异常的传感器系统用于磁异常定位[2]。
根据三轴磁传感器的输出模型,可将外界干扰等效成三轴磁传感器系统三轴磁场数据的零偏误差和标度因数。
目前对于三轴磁传感器系统的标定,主要有陈伟等人提出的利用GPS信息作为参考进行标定[3],郭鹏飞等人提出的十二位置不对北标定法[4],以及朱建良等人提出的椭球曲面拟合法[5]。
这些方法都有各自的缺点,极大的限制了三轴磁传感器系统在野外的使用,同时也增加了三轴磁传感器系统的使用成本。
文中提出的三轴磁传感器系统在线标定算法,继承了椭球曲面拟合标定法的灵活性以及无需转台就能进行等优点,并针对椭球曲面拟合算法无法独立完成计算的缺点,提出了使用递推算法计算标定过程中需要用到的椭球系数的方法。
使三轴磁传感器系统能够独立完成标定工作,降低了使用成本,也使其使用范围更加广泛。
地磁场的干扰主要来源于周围环境中的磁性材料产生的磁场。

一种三轴加速度传感器的校准方法我折腾了好久一种三轴加速度传感器的校准方法,总算找到点门道。
说实话,一开始我真是瞎摸索,啥也不懂就一头扎进去了。
我最先想到的是按照传感器手册上最基本的步骤来做。
它说要先把传感器放在一个水平静止的平面上,我就找了我家最平的桌子,以为这样就行了。
结果呢,测出来的数据总是不太对。
我当时就懵了,完全不知道哪里出了问题。
后来我才意识到,我家桌子虽然看着平,但可能在微观层面根本就不绝对平。
接着我又试了在不同的放置角度下进行校准。
我就跟个摆弄小玩具的小孩似的,把传感器翻来覆去各种放,30度角、60度角等等。
可得到的数据乱成一团麻。
我这才明白,毫无规律的乱试是不行的,还是要有一个系统的方法。
然后我仔细研究了一下三轴加速度传感器的原理。
我感觉它就像一个小眼睛,在三个方向上去敏锐地感知加速度。
那校准的话,是不是就像给这个小眼睛戴上合适的眼镜呢?这么一想,我就又有了新的尝试方向。
我想,如果有一个更精准的参照平台就好了。
于是我找了一块从实验室拿来的校准板,这个校准板是专门用来校准一些精密仪器的,精确度很高。
我把传感器小心翼翼地放在上面之后,按照手册上的标准流程重新做了一次校准。
并且我在每一步都记录下了详细的数据。
这个过程就像走钢丝一样,每个环节都得特别小心。
我还学到了一点,就是校准的时候环境要尽可能安静而且温度要相对稳定。
有一次我在一个开着空调且旁边有人走来走去的地方校准,得到的数据就偏差很大。
因为我觉得周围的空气震动就像是小怪兽一样,干扰了传感器这个小卫士的正常工作。
其实我也还不是完全确定自己这个校准方法就是完美无缺的,但目前这么做得到的数据确实稳定多了。
我大概总结一下哈,首先要有一个精准的基准平台,像我用的那个校准板就很好;然后严格按照标准流程细心地操作,还得注意环境因素,别让那些干扰因素捣乱。
当然了,如果能多做几次校准,然后取一个平均值,我感觉会更加准确可靠一些。
这就是我目前折腾这个三轴加速度传感器校准方法的一些收获啦。
三轴加速度传感器安装误差标定方法研究张辉;柴伟;罗强;刘漫霞【摘要】For the important role of three-axis acceleration sensor in the vehicle state measurement, the installation error was studied when the acceleration sensor installed in the vehicle. A calibration method based on a mathematical model is proposed. Without any other measuring instruments, the calibration process can be completed by the model calculating several measurement data from the fixed sensor. Experiments result proves the validity of this method,and the calibration error is less than 3%.%针对三轴加速度传感器在车辆行驶状态测量方面的应用,研究了三轴加速度传感器在车辆上的安装误差问题,提出了一种通过数学解算模型对安装误差进行标定的方法.标定过程无需借助其他测量仪器,只需要使用安装后的传感器进行多次测量,通过数学模型解算这组测量数据即可实现安装误差的测量与标定.通过实验验证,此方法方便有效,标定误差小于±3%.【期刊名称】《传感技术学报》【年(卷),期】2011(024)011【总页数】5页(P1542-1546)【关键词】加速度传感器;误差标定;欧拉定理;车辆姿态【作者】张辉;柴伟;罗强;刘漫霞【作者单位】中山大学智能交通研究中心,广东省智能交通系统重点实验室,广州510006;中山大学智能交通研究中心,广东省智能交通系统重点实验室,广州510006;中山大学智能交通研究中心,广东省智能交通系统重点实验室,广州510006;中山大学智能交通研究中心,广东省智能交通系统重点实验室,广州510006【正文语种】中文【中图分类】TP212.9近年来微机电系统(MEMS)的研究发展迅速,加速度传感器在汽车电子领域的应用日益广泛[1]。
三轴磁力计校准三轴磁力计是一种用于测量磁场强度的仪器,它可以在三个不同轴向上测量磁场的分量,并通过校准来确保测量结果的准确性和可靠性。
本文将介绍三轴磁力计的校准方法和步骤。
为了进行校准,我们需要了解三轴磁力计的工作原理。
三轴磁力计通常由三个磁场感应器组成,分别测量X、Y和Z轴上的磁场分量。
在没有外部磁场干扰的情况下,三轴磁力计的输出应为零。
然而,由于外界磁场的存在,三轴磁力计的输出可能会发生偏移。
为了校准三轴磁力计,我们需要将其暴露在已知磁场下,并记录其输出值。
校准的目标是通过调整磁力计的输出,使其与已知磁场值相匹配。
以下是三轴磁力计校准的步骤:1. 设置实验环境:将三轴磁力计置于一个无磁场的环境中,远离任何可能产生磁场干扰的物体。
2. 建立坐标系:确定三轴磁力计的坐标系,通常选择X轴为水平方向,Y轴为竖直方向,Z轴为与地球磁场垂直的方向。
3. 校准零点:将磁力计置于无磁场环境中,记录其输出值。
如果输出值不为零,可通过调整磁力计的零点偏移校准参数将其调整为零。
4. 水平校准:将磁力计水平放置,记录其输出值。
根据水平方向的已知磁场值,调整磁力计的水平校准参数,使其输出与已知值相匹配。
5. 竖直校准:将磁力计竖直放置,记录其输出值。
根据竖直方向的已知磁场值,调整磁力计的竖直校准参数,使其输出与已知值相匹配。
6. 水平旋转校准:将磁力计围绕竖直轴进行水平旋转,记录其输出值。
根据旋转角度和已知磁场值,调整磁力计的水平旋转校准参数,使其输出与已知值相匹配。
7. 垂直旋转校准:将磁力计围绕水平轴进行垂直旋转,记录其输出值。
根据旋转角度和已知磁场值,调整磁力计的垂直旋转校准参数,使其输出与已知值相匹配。
通过以上步骤,我们可以完成对三轴磁力计的校准工作。
校准后的磁力计将能够更准确地测量磁场强度,并消除由于外界磁场干扰引起的误差。
需要注意的是,三轴磁力计的校准应在无磁场干扰的环境中进行,并且校准参数应根据实际需求和具体应用进行调整。
基于迭代算法的三轴磁传感器标定与误差补偿技术研究王萌夏;吴益飞;于斌【期刊名称】《兵工自动化》【年(卷),期】2015(000)002【摘要】In the magnetic navigation system, according to the long computation time and big error of the magnetic sensor calibration, an iterative algorithm for tri-axial magnetic sensor calibration and measurement error compensation is put forward. By analyzing the sources of error in tri-axial magnetic sensor in the process of measurement, a parameterized mathematical model comprising sensor’s calibrating and measurement error is given. At the same time, this paper analyzes how the process of iterative algorithm is applied to determine the error parameters. Simulation and experimental results show that this algorithm can effectively compensate the three-dimensional measurement error, and also can eliminate influence of the interference caused by the hard magnetic material.%针对现有地磁导航系统中磁传感器标定方法存在的计算时间过长和误差较大等问题,给出一种可以标定与补偿三轴地磁分量的迭代算法。
三轴磁传感器快速标定方法研究作者:王庆宾张晓明来源:《中国测试》2017年第07期摘要:针对现有的三轴磁传感器标定过程比较复杂,而且对环境要求较高等问题。
提出基于椭球拟合的三轴磁传感器标定方法,利用绕“8”字的方式实现三轴磁传感器快速标定。
采用基于最小二乘的椭球拟合方法标定三轴磁传感器的零点误差、灵敏度误差、不正交角误差。
建立绕“8”字方式标定准确度的评价指标角度覆盖度,通过实验研究得到角度覆盖度必须达到1.3以上才能得到高准确度的标定参数。
通过标定朝向与角度覆盖度综合实验,得到提升标定准确度的绕“8”字操作方法,简化标定过程。
关键词:三轴磁传感器;标定补偿;椭球拟合;绕“8”字文献标志码:A 文章编号:1674-5124(2017)07-0035-05Abstract: Aiming at the complicated calibration process of existing three-axis magnetic sensor and higher requirements for environment, a calibration method of three-axis magnetic sensor based on ellipsoid fitting that used an 8-shaped figure to achieve rapid calibration of three-axis magnetic sensoris was proposed. A calibration experiment was conducted in an 8-shaped figure and three errors, offset and sensitivity and nonorthogonality, were calibrated by using ellipsoid fitting method based on least squares. The angular coverage of the evaluation index around an 8-shaped calibration precision was established. The experimental results show that the angle coverage must reach 1.3 or above to obtain high accuracy calibration parameters.Through the comprehensive experiment of calibration orientation and angle coverage, the operation method of raising the calibration precision around an 8-shaped is obtained, and the calibration process is simplified.Keywords: three-axis magnetic sensor; calibration and compensation; ellipsoid fitting; an 8-shaped figure0 引言目前获取高准确度的地磁场数据信息是完成精准导航的前提条件,有必要采用合理的方法完成三轴磁传感器的标定以获取较为准确的地磁场数据。
现有的磁传感器标定方法有:十二位置法与加速度信息相结合的方法[1-2],其优点是操作起来会比较方便;采用迭代算法对三轴磁传感器标定补偿[3-4],可用于在线标定,但该方法标定的准确度较低;使用共轭梯度法[5]标定磁传感器,其优点是标定的准确度高;利用外加磁场法进行标定[6-7],可以得到比较合适的误差参数,但所需外界条件的要求比较高;椭圆假设法[8-9]要求载体在一个平面内运动,对于载体的运动姿态具有一定的限制。
以上方法都有各自的优点,但是其标定过程对外界环境的要求相对较高,不易于现场标定的实现[10]。
本文提出基于最小二乘椭球拟合法的绕“8”字三轴磁传感器快速标定方法。
相比于以上方法,不需要载体的姿态基准并且易于完成[6-10],具有所需数据量小、算法简单、得到的标定参数准确度较高等优点[11]。
3 实验结果3.1 标定朝向因素分析研究绕“8”字标定朝向的影响因素时,在实验的过程中选择了6个朝向进行研究,分别为(0,0)、(90°,0)、(180°,0)、(270°,0)、(0,90°)、(0,-90°)。
在6个朝向分别绕“8”,为避免出现偶然误差每组重复做3次,其结果如表1所示。
由表中数据可以看出在朝向为(90°,0)磁场误差比传统标定方式的准确度高,其他朝向上的磁场误差较大,即在朝向为(90°,0)标定质量最高。
3.2 角度覆盖度因素分析角度覆盖度直接影响着标定质量,对其影响情况做了相应的实验,实验结果如表2所示。
由表可知,随着角度覆盖度的增大,磁场误差减小,当角度覆盖度达到1.3时标定的质量保持稳定,即标定时尽量保证角度覆盖度在1.3以上。
为了探究标定朝向与角度覆盖度之间的关系,做了以下研究。
3.3 朝向因素与角度覆盖度因素综合分析在单个朝向的情况下其角度覆盖度的结果如表3所示。
在单个朝向的情况下角度覆盖度都不能达到1.3以上,其标定的质量也相对较低。
对两个任意朝向进行组合,每个组合进行3次实验,其结果如表4所示。
任意两个朝向组合后磁场误差明显变小,相比于传统标定方法,其磁场误差更小,而且角度覆盖度基本接近于2。
分别用3种方法对三轴磁传感器进行多次标定,其误差平均值如表5所示。
可以看出,绕“8”字法得到的磁场误差值要小于其他方法,综上使用绕“8”字标定方法时要采用两个朝向画“8”字,才能得到较高准确度的标定参数。
4 结束语对于三轴磁传感器的快速标定,本文提出的绕“8”字法具有所需数据量小、标定过程简单,得到的标定参数准确度较高等优点,适合于三轴磁传感器现场快速标定。
并得出以下结论:1)角度覆盖度必须达到1.3以上才能得到高准确度的标定参数。
2)使用绕“8”字标定方法时,采用两个朝向画“8”字能保证角度覆盖度都在1.9以上,并得到较高准确度的标定参数,达到指标要求。
参考文献[1] 张娇,陈静,杨栓虎. 三轴磁阻式传感器标定方法的研究[J]. 弹箭与制导学报,2010,30(6):46-48.[2] 陈文荣,张婧. 三轴磁传感器制造误差补偿方法研究[J].现代防御技术,2015,43(6):190-193.[3] 盛蔚,蒋勇. 三轴磁传感器系统的在线标定[J]. 弹箭与制导学报,2015,35(3):179-182.[4] 王萌夏,吴益飞,于斌. 基于迭代算法的三轴磁传感器标定与误差补偿技术研究[J]. 兵工自动化,2015,34(2):81-85.[5] SABER T, RAJESH R. Magnetic sensor-based large distance position estimation with disturbance compensation[J]. IEEE Sensors Journal,2015,15(8):4249-4257.[6] 范玉宝,李杰,张晓明,等. 基于椭球拟合的微惯性测量组合现场快速标定方法[J]. 传感技术学报,2011,24(11):1547-1550.[7] 朱建良,王兴全,吴盘龙,等. 基于椭球曲面拟合的三维磁罗盘误差补偿算法[J].中国惯性技术学报,2012,20(5):562-566.[8] FANG J C H, SUN H W, CAO J J, et al. A novel calibration method of magnetic compass based on ellipsoid fitting[J]. IEEE Transactions on Instrumentation and Measurement,2011,60(6):2053-2061.[9] ZHANG X M, GAO L Z. A novel auto-calibration method of the vectormagnetometer[C]∥IEEE International Conference on Electronic Measurement & Instrument,2009.[10] MARKOVSKY I, KUKUSH A, HUFFEL S V. Consistent least squares fitting of ellipsoids[J]. Numerische Mathematik,2004,98(1):77-194.[11] FITZGIBBON A, PILU M, FISHER R. Direct least-square fitting ofellipses[C]∥Process International Conference on Pattern Recognition,1996:253-257.[12] 杨晓东,王炜. 地磁导航原理[M]. 北京:国防工业出版社,2009:67-80.[13] VOJT?魫CH P, VIKTOR F, ANTOIN P. Cross-field effect in a triaxial AMR magnetometer with vector and individual compensation of a measured magnetic field[J]. IEEE Transactions on Magnetics,2016(76):1-5.[14] PANG H F, PAN M C, CHEN J F, et al. Integrated calibration and magnetic disturbance compensation of three-axis magnetometers[J]. Measurement,2016(93):409-413.[15] FITZGIBBON A, PILU M, FISHER R B. Direct least square fitting of ellipses[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1999,21(5):476-480.[16] ZHANG Q, PANG H F, WAN C B. Magnetic interference compensation method for geomagnetic field vector measurement[J]. Measurement,2016(91):628-633.(编辑:李妮)。