ABBPCM软件使用方法详解
- 格式:doc
- 大小:81.50 KB
- 文档页数:7

Release NotesPC SDK5.15Revision: -Table of Contents The information in this manual is subject to change without notice and should not be construed as acommitment by ABB. ABB assumes no responsibility for any errors that may appear in this manual.Except as may be expressly stated anywhere in this manual, nothing herein shall be construed as any kind of guarantee or warranty by ABB for losses, damages to persons or property, fitness for a specific purpose or the like.In no event shall ABB be liable for incidental or consequential damages arising from use of this manual and products described herein.This manual and parts thereof must not be reproduced or copied without ABB's written permission, and contents thereof must not be imparted to a third party nor be used for any unauthorized purpose. Contravention will be prosecuted.Additional copies of this document may be obtained from ABB at its then current charge.© Copyright 2012 ABB All rights reserved.ABB ABRobotics ProductsSE-721 68 VästeråsSweden© Copyright 2012 ABB All rights reserved 2ContentsOverview 5 1 Release Information 61.1 General 61.2 Contents 62 What’s New in this Release? 72.1 Robot Communication on Developer Center 73 Late-breaking information 83.1 Overview 84 Problems Corrected 94.1 Solved Product Defect Documents (PDD) since PC SDK5.14.03 95 Known Limitations 106 Installation Information 126.1 Hardware and Software requirements 136.2 Compatibility 147 Technical Support 15OverviewDescriptionThis document provides information about the new features, problems corrected, andinstallation of PC SDK.Product OverviewPC SDK can be used to develop customized PC applications, for communication withthe IRC5 controller.It can also be used to develop RobotStudio add-ins that interacts with the IRC5controller.PC SDK applications can connects to one or several IRC5 controllers, real as well asvirtual.No license is required to develop applications using PC SDK.The option “PC Interface” is required to allow PC SDK applications to connect to theIRC5 controller over LAN network.For download, updates and information, visit the RobotStudio Community:/roboticssoftware.To get started, or to learn more, visit our Developer Center:Here you will also find the User Forum, where developers discuss software problemsand solutions online:/forum1 Release Information1.1 GeneralRelease NameThe release name is PC SDK 5.15 and the build number is 5.15. 0261.Release DateThe release date is 12th of October, 2012.1.2 Contents.NET AssembliesABB.Robotics.dllABB.Robotics.Controllers.dllRedistributablesABBControllerAPI.msmRobot Communication Runtime installerDocumentationReference Manual – PC SDK (Html Help). Documentation of class libraries with methodsignatures in C# and Visual Basic.Application Manual – PC SDK (Html Help and PDF).After installation the documentation can be launched from the Windows Start MenuPrograms\ABB Industrial IT\Robotics IT\Robot Studio 5.15\SDK.The manuals and additional samples are also available at.2 What’s New in this Release?OverviewThis section contains information about new features in this release.2.1 Robot Communication on Developer CenterYou can now access the PC SDK Application and Reference Manual from.To help you get started you will also find complete walk-through projects for download.3 Late-breaking information3.1 OverviewThis section contains late-breaking information that will be included in the appropriatedocuments in the subsequent releases.Nothing in this release.4 Problems CorrectedOverviewThis section describes the problems solved in PC SDK.4.1 Solved Product Defect Documents (PDD) since PC SDK5.14.03ID Title- Controller.IOSystem.GetSignals performancedegraded in 5.14.03PDD308 Old PC SDK Apps not working with/against RW5.14.025 Known LimitationsOverviewThis section describes known limitations in PC SDK.*Value of RAPID data exeeding 1024 bytes cannot be retrievedIt is not possible to retrieve a value of a RAPID data exceeding 1024 bytes.An instance of a large RECORD may exeed this limition, as well as an array of suchrecords, for example.Workaround 1: Make your data smaller in size, for example by using two smaller records with less elements in each, instead of one large record with lots of elements.Workaround 2: Do not retrieve the entire value of a RAPID array. Instead retrieve thevalue element by element. Prefer using RapidData.ReadItem(i), over ArrayData[i].PC SDK UIInstructionEvent / RAPID UIListViewUIListViewEventArgs.ListItems may return the wrong number of list items if - if youare using characters like double quote (“) and brackets ([ ]) in the RAPID array of listitem strings, theAvoid using double quote (“) and brackets ([ ]).FlexPendant may lock up when PC SDK application release and immedeatley request mastershipIn manual mode, when a PC SDK application releases master and immediatelyrequests master again, the FlexPendant is locked up when the user presses theprompt to grant write access to the PC SDK application. In automatic mode there isno problem.IPC Messaging - PC SDK always sends 444 bytes of dataWhen sending a message with IpcQueue.Send(), the size of the message sentover the network will be 444 bytes, regardless of the amount of data passed toSend(). Data must therefore be null terminated.IPC Messaging requires MTA threadIpcQueue.Send() must be called from an MTA thread. Create a separate senderthread and use the method Thread.SetApartmentState() to set the apartmentstate to MTA before starting it.IsLocal on the class RapidData, returns true for shared dataThe property IsLocal on the class RapidData, returns true for shared data, eventhough such data is visible from all modules.The declarations of default zonedata and speeddata has been moved from moduleBASE.SYS in each task, and are now installed as shared data.If an application used to create a RapidData object representing for example"v1000", the IsLocal property returned false in RobotWare 5.12, but will return truein RobotWare 5.13."6 Installation InformationOverviewTo install PC SDK click RobotStudio on the RobotWare & RobotStudio DVD.If you select the default installation option Complete, PC SDK will be installed. If youwant to install only PC SDK and not RobotStudio select the installation option Custom.PC SDK 5.xx will be installed side by side with any previous major version of PC SDK5.xx, while minor versions within a release will update to the latest one.Microsoft Visual Studio development environment is used to develop PC SDKapplications.Refer to chapter 6.1 for a list of supported versions of Visual Studio.The default installation path is C:\Program Files\ABB Industrial IT\Robotics IT\SDK\PCSDK 5.15.6.1 Hardware and Software requirementsSoftware requirementsPC software requirementsOperating SystemsMicrosoft Windows XP SP3 – 32bit editionMicrosoft Windows 7 – 32bit editionMicrosoft Windows 7 – 64bit editionMicrosoft Windows 8 – 64 bit editionRobot Communication RuntimePC SDK applications requires Robot Communications Runtime to be installed on thePC. The runtime is installed by RobotStudio installation, and can also be installedseparately from C:\Program Files\ABB Industrial IT\Robotics IT\SDK\PC SDK5.15.xx\redistributable\RobotCommunicationRuntime after you have installed PC SDK.Redistributables for earlier versions of PC SDK can be found onRobotStudioRobotStudio 5.15 is needed for building virtual controller systems and fordebugging and testing in the virtual environment.Please see /forum for more information.IRC5 software requirements- RobotWare option "PC Interface" for communication with IRC5 controller.Supported development environmentsMicrosoft Visual Studio 2008Express edition or better.Microsoft Visual Studio 2010Express edition or better.Microsoft Visual Studio 2012Express edition or better.6.2 CompatibilityThe APIs in PC SDK 5.15.xx are backwards compatible with the APIs in PC SDK5.14.There are no breaking changes.PC SDK communicates with the robot controller using the Robot CommunicationRuntime, which is designed to be backwards compatible with earlier versions ofRobotWare.Note! Functionality introduced in later versions of RobotWare will not be available for aPC SDK application that is connected to a controller with an older version ofRobotWare.For example the Messaging functionality is only supported on RobotWare 5.10 andabove. This means that a PC SDK application cannot use the Ipc class whencommunicating with a controller with RobotWare 5.09.The code will compile, but an exception will be thrown at runtime. Applicationdevelopers are responsible for handling this scenario in their applications. Please referto the PC SDK Reference Documentation for details.Note! Compatibility between RobotWare minor revisions is guaranteed (PC SDK5.15.01 will be compatible with PC SDK/RW 5.15.02 etc)..7 Technical SupportFor technical support please turn to your local ABB office./contactsFor help, advice and the latest updates please visit the User Forum./forum。

PCM网管系统软件说明书目录产品概述 (3)系统安装指南 (4)2.1 配置要求 (4)2.2 安装步骤 (5)界面介绍 (11)3.1 主界面 (11)3.2 系统主菜单 (13)3.3 网络导航栏 (13)3.4 应用层拓扑图 (14)3.5 网元视图 (15)3.6 提示窗 (15)操作指南 (16)4.1登录网管操作系统 (16)4.2创建和删除网络 (17)4.3创建和删除网元 (18)4.4配置网元 (19)主要功能 (20)5.1主界面底图调换 (20)5.2用户管理 (20)5.3串口设置 (22)5.4 IP信息 (22)5.5数据管理 (23)6 PT-50S(6U,3U)设备管理及测试 (27)6.1设备告警测试 (27)6.2时隙配置 (29)6.3设备告警屏蔽 (31)6.4设备E1设置 (32)6.5设备时钟设置 (33)6.6设备信令位设置 (33)6.7设备收/发电平点设置 (34)6.8设备通路测试 (35)6.9设备外线测试 (36)6.10恢复出厂设置 (37)PTNMS 网管系统说明书1产品概述本系统是由广西新海通信科技有限公司于2008 年最新推出的传输设备监控系统。
系统采用面向对象编程工具开发,具有友好的图形界面,使用户操作非常直观简捷,极大地方便了使用,并且适应不同操作系统,它可运行于Windows 98 或Windows NT/XP 等系统环境。
PC 通过以太网接口或串口进行监控。
不同的设备网管串口类型不同,有RS422,RS232 两种。
若网管监控口为RS422,则PC 串口处接一“RS232 转RS422”转换器与该监控口相连。
若通过以太网进行监控,则网管监控口处接一FE 模块。
利用Internet 网络,可进行远程监控。
(关于“FE 模块”的使用,请参考使用说明书最后的附件部分。
)远端设备和本地设备均能实现网管。
设备提供 2 个网管监控口,本地设备通过网管监控口接联,远端设备可通过E1 的TS0 或专用的网管通道相连。
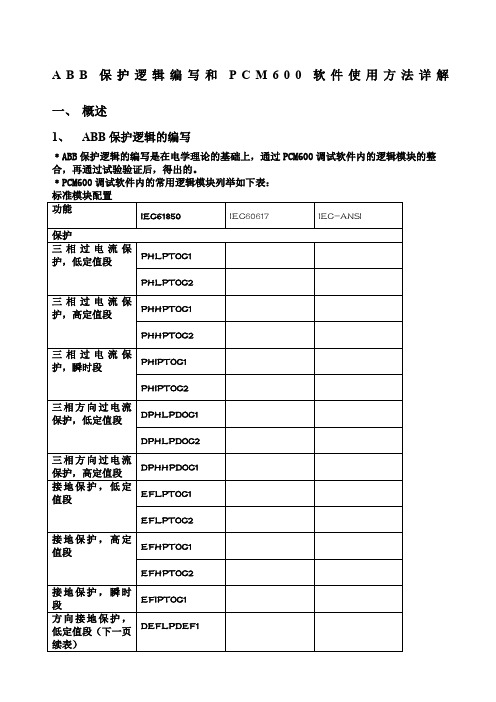
A B B保护逻辑编写和P C M600软件使用方法详解一、概述1、ABB保护逻辑的编写﹡ABB保护逻辑的编写是在电学理论的基础上,通过PCM600调试软件内的逻辑模块的整合,再通过试验验证后,得出的。
﹡PCM600调试软件内的常用逻辑模块列举如下表:可编写出相应的逻辑。
2、PCM600软件的应用PCM600软件主要应用于保护逻辑的编写、通讯点表的配置、从装置读出逻辑和输入逻辑的功能,具体应用步骤见第二部分PCM600软件的打开和保护装置新建。
二、PCM600软件的打开和保护装置新建1、软件打开:双击“PCM600Engineering”2、新建站:单击左上角白色新建站单击“YES”在“Projectname”下新建站名2、新建设备:单击鼠标右键“New”---“General”---单击“IEDGroup”鼠标移动到新建设备上,单击鼠标左键,修改和开关柜对应的名称3、新建装置:单击右键“New”--“FeederIEDS”—单击“REF615”选择“Offlineconfiguration”---单击“Next”单击“Next”单击“Next”单击“Next”选择和装置相对应的序列号,单击“Generate”—稍等片刻,单击“Close”单击“Next”单击“Finish”单击“确定”4、逻辑的编写:鼠标移动到新建装置上,单击右键—单击“ApplicationConfiguration”显示逻辑编写区域,可根据现场需要采用不同保护模块完成逻辑的编写,各个模块的详细讲解请看技术说明书和产品说明书。
5、通讯点的配置:单击鼠标右键—单击“CommunicationManagement”单击“OK”把“Notinuse”改为“Defaultdefinitions”,然后保存,关闭。
6、把逻辑输入装置内:鼠标移到装置上,单击右键—单击“SetTechnicalKeyinIED”单击“确定”选中“TechnicalKeyinPCM600”---单击“OK”鼠标移到新建装置上,单击右键—单击“Updataplantstructure”单击“确定”鼠标移到新建装置上,单击右键—单击“WritetoIED”,等待进度条进行完毕,显示“success”时,说明输入装置内的逻辑已经完成。

ABB保护逻辑编写和PCM600软件使用方法详解一、概述1、ABB保护逻辑的编写*ABB保护逻辑的编写是在电学理论的基础上,通过PCM60调试软件内的逻辑模块的整合,再通过试验验证后,得出的。
*PCM60调试软件内的常用逻辑模块列举如下表:标准模块配置逻辑模块的详细解读,请参照ABB技术说明书。
根据各个模块的功能,依据现场实际情况可编写出相应的逻辑。
2、PCM60软件的应用PCM60软件主要应用于保护逻辑的编写、通讯点表的配置、从装置读出逻辑和输入逻辑的功能,具体应用步骤见第二部分PCM60软件的打开和保护装置新建。
二、PCM600软件的打开和保护装置新建1、软件打开:双击“ PCM600Engineering”2、新建站:单击左上角白色新建站单击“ YES'在“ Project name ”下新建站名2、新建设备:单击鼠标右键“New --- “General” ---单击“ lEDGroup”鼠标移动到新建设备上,单击鼠标左键,修改和开关柜对应的名称3、新建装置:单击右键“ New” -- “FeederlEDS” 一单击“ REF615选择“ Offlineconfiguration ” --- 单击“ Next ”单击“ Next ”单击“ Next ”单击“ Next ”选择和装置相对应的序列号,单击“Ge nerate ”一稍等片刻,单击“ Close ”单击“ Next ” 单击“ Finish 单击“确定”4、逻辑的编写:鼠标移动到新建装置上,单击右键—单击“ ApplicationConfiguration ” 显示逻辑编写区域,可根据现场需要采用不同保护模块完成逻辑的编写,各个模块的详细讲解请看技术说明书和产品说明书。
5、通讯点的配置:单击鼠标右键—单击“CommunicationManagement”单击“ OK”把“ Notinuse ”改为“ Defaultdefinitions ”,然后保存,关闭。

软件操作说明ABB机器人码垛软件包操作说明书注意事项:1、码垛软件包需授权使用,机器人之间不能共享同一码垛软件包文件,授权详情请与ABB机器人销售人员进行联系;2、机器人开机时码垛界面自动打开,请保持全程开启此界面,关闭之后则不再响应外部选型请求,若误操作关闭了此界面,请在ABB菜单中重新打开此界面:”Pallet HMI”3、远程选型时,选型完成后需确认机器人码垛界面下方灰色状态栏上显示的编号与远程所选编号一致之后方可启动;4、若码垛界面出现卡屏或死机,则需要断电重启机器人,断电与重新上电时间间隔不得少于2分钟;此情况下未保存的配置数据均会丢失,所以在配置过程中要及时进行保存;5、已设置完成的产品若更改其名称或进行删除,则所有涉及该产品的垛型数据均会强制删除;6、人为修改码垛计数器时,请确保机器人已停止运行,必须先复位再修改数值,方可生效;信息代码:1001首次启动时托盘上已经有物料;2001选型数据正在加载中,请等待;2002选型错误,外部输入选型编号与机器人端不匹配;8001等待夹具夹板大开到位;8002等待夹具夹板夹紧到位;8003等待夹具气缸夹紧到位;8004等待夹具夹板松开到位;8005等待夹具夹板小开到位;8006等待输入线产品到位;8007等待栈复位完成信号;8008等待栈启动信号;8009机器人复位完成,等待启动;本操作说明书以实际案例配置过程为主要内容,并辅以各界面功能的说明;1、系统配置1.1、机器人系统配置机器人系统必须包含软件功能选项617-1 FlexPendent Interface,否则无法运行码垛软件包;可通过ABB菜单的系统信息查看此台机器人是否拥有此功能,如下图所示,系统信息中的选项一栏中显示出该机器人系统当前已配置的功能,若需购买此功能请与ABB机器人销售人员进行联系;1.2、码垛软件包文件加载我们需要在机器人系统HOME目录下面加载码垛软件包文件,共有2个文件需要加载:TpsViewPalletize.dllTpsViewPalletize.gtpu.dll建议使用ABB仿真软件进行加载,使用网线与机器人连接,通过控制器菜单中的文件传送功能进行文件的加载,文件必须存放在机器人系统HOME目录下,加载文件之后,热启动方可生效;层型配置:设定产品参数,即长宽高、重量等基本信息;层型样式,即产品的在平面内的排列样式;垛型配置:设定垛型参数,即整个垛型中各层所调用的产品以及产品的层型样式;在一个机器人工作站中最多支持同时运行4工位码垛,每工位码垛最多支持10层,每层最多支持20个产品;下传数据:将所配置的码垛数据下载到机器人控制器,并可设置产品选型模式;运行监控:显示当前运行过程中正在执行的码垛数据,并可人为修改码垛数据;1.3、加载IO文件此案例默认DeviceNet总线,配置2个DCQC652通讯板卡(PNP型数字输入输出、16进16出),则需在系统参数中加载IO配置文件:EIO.cfg;可从示教器端或者仿真软件端进行加载,依次点击ABB菜单-控制面板-配置-文件,选择加载参数,默认第一种加载方式,浏览至所需加载的EIO.cfg文件,加载完成需要热启动方可生效;1.4、加载程序模块需要加载3个程序模块:系统模块:ProductData.sys,存储产品及垛型数据(可修改);系统模块:Palletizing.sys,垛型计算模块(已加密);程序模块:MainModule.mod,主程序运行模块(已加密);可从示教器端或者仿真软件端进行加载,依次点击ABB菜单-程序编辑器(如出现是否加载程序提示,则暂时点取消)-程序模块-文件-加载模块,浏览至所需加载的3个模块,依次进行加载,若中途出现程序错误提示,暂时不予处置,待全部加载完成后,可消除错误提示;2、层型配置2.1、码垛参数本文所涉及的工作站码垛案例相关参数:产品尺寸:600*400*300mm托盘尺寸:1200*1000mm产品重量:20kg布局说明:1个进料线,2个码垛工位层型数据:2个层型样式,典型3+2跺型,即横2个竖3个,两个层型样式位置相互交错;垛型数据:共计3层,奇数层调用层型样式1,偶数层调用层型样式2;码垛顺序:集中码垛一侧,码垛完成后,转向另一侧码垛;2.2层型配置步骤点击码垛界面的“层型配置”图标,进入层型配置界面;通过动作菜单,我们可以进行新建、删除、编辑、复制操作:点击动作菜单,选择新建,则可在输入框中依次输入产品相关参数:产品名称:建自定义产品名称,此名称作为唯一的索引标识,建议使用产品尺寸进行命名;此示例中命名为P600_400_300;长宽高:产品实际尺寸,单位毫米;此处依次输入600、400、300;重:产品实际重量,单位千克;此处输入20;接近X\\Y:码垛过程中设置靠拢数据,即平面XY方向的横向靠拢距离,单位毫米;此处依次输入100、100;根据之前所注明的产品相关数据在对应的输入框中依次输入:P600_400_300、600、400、300、20、100、100;输入完成后,点击”确定“;注意:产品名称确定之后,最好不要再次更改,尤其是当垛型配置里面若调用了该产品,修改产品名称,则涉及该产品的所有垛型会自动删除!之后,选中我们需要编辑的产品”P600_400_300“,点击”继续“,进入层型管理:工件个数:该层型样式中所包含的工件个数;托盘X\\Y长:托盘尺寸,在托盘上面示教工件坐标系,分别表示的是X方向托盘长度以及Y方向托盘长度;建议使用真实的码垛区域尺寸进行设置,这样便于之后的产品位置设置;假设当前实际托盘尺寸只有1100*900mm,但实际码垛区域为1200*1000mm,则建议输入后者实际码垛区域尺寸;长\\宽裕量:允许产品摆放位置超出托盘边界,不建议使用,若实际情况确实需要超过边界,可参考”托盘长\\宽“的的设置说明;偏移X\\Y:设置该层型在平面方向的整体偏移;假设码垛时发现1层和2层之间整体有偏移,则可在层型样式中设置相关偏移XY进行整层偏移设置;在此案例中我们需要设定2个层型样式,均为5个工件,托盘大小均为1200*1000mm,暂不设定偏移XY;首先进行层型1的设置,选中层型1,点击继续,进入层型编辑界面,进行工件位置数据的设置;此处提供2种层型编辑方式:数字型编辑和图形化编辑;数值型编辑界面:在此界面可新建、删除、编辑工件位置属性,包括码放顺序、XY 坐标值、码放角度、码放时的接近方向;所涉及的相关数据均以示教的托盘原点为基准进行计算,托盘基准可点击预览画面进行查看和修改;图形化编辑界面(点击预览进入图形化编辑,之后点击返回可进入数值型编辑):建议使用图形化编辑,在该界面中可通过箭头直接移动产品位置,若对码垛位置精度要求较高,可先通过图形编辑大致确定其位置,然后返回至数值型编辑界面进行位置数据的编辑,进行精确定位;2个界面为实时同步,可自由选取编辑方式;此处我们以图形编辑界面为主进行说明;旋转基准:必须保证图形显示位置和姿态与真实示教的托盘基准一致,蓝色三角长边默认为夹具开合方向;旋转工件:可旋转工件角度,显示的角度值时相对于基准姿态的偏移值;接近方向:设置码放过程中的接近方向,共设有9中方向:0默认为无接近方向,码放序号:设置该层码垛过程中的码放顺序,必须保证数值连续性;移动步长:移动工件时,单步移动距离,可设置步长范围为0-100mm首先确定基准的方向,若需要调整,则可通过旋转基准进行设置,此处我们将基准旋转为如下图所示姿态:图形中三角型的长边即为钩爪侧,需要根据实际示教的基准点状态时钩爪所处位置进行同步设置,所有工件的位置数据均以此为基准,设置时请务必确认无误后再进行工件位置的设置;此案例中,层型样式1需要设置5个工件,依次点击5次”新建“;选中需要编辑的工件,若需旋转角度则可通过旋转工件进行设置,设置移动步长,然后利用方向箭头进行位置设置;建议先将移动步长设为较大的值,进行工件的粗放置,然后采用较小的步长值进行微调;配置过程中我们需要合理调整工件角度,主要是为了考虑夹具开合方向,需要根据实际产品以及工具进行调整;此案例中层型样式1需要调整为如下样式:位置确定完成后,下一步确定码放顺序,可通过码放序号按钮进行统一设置;点击码放序号按钮则可激活该功能,然后依次选中需要编辑的工件,通过数字键盘进行设置;设置完成后再次点击码放序号按钮可取消该功能;综合考虑夹具开合因素,此层型样式中各工件的码放顺序如下图所示:码放顺序确定之后需要设置接近方向,可通过接近方向按钮进行设置;点击接近方向按钮可激活该功能,依次选中需要编辑的工件可进行设置,选完接近方向之后点击空白处即可完成设置,不设置的话则默认为0,即无接近方向;设置完成后再次点击此按钮可取消该功能;层型样式1接近方向设置如下图所示:注意:配置完成之后,及时点击保存按钮,保存当前配置,以避免因意外断电或死机造成已配置的数据丢失!配置完成之后,若仍需精确定位,则可返回至数值型编辑界面,通过修改工件位置数据进行精确定位;选择需要编辑的工件,输入修改后的位置数据,点击提交即可完成修改;通过上述操作,我们已经完成了层型样式1的相关配置,按照上述操作,完成层型样式2的相关配置,样式2的排序方式、码放顺序、接近方向参考下图:3、垛型配置点击码垛界面的“垛型配置”图标,进入垛型配置界面;在垛型配置界面,操作的对象为工作流,工作流即码垛任务,包含输入线的数量、托盘工位的数量、各托盘工位的码垛样式等参数;本案例为1个输入线,2个托盘工位,我们新建一个工作流并对其进行相关设置;编号:自定义,此编号作为选型编号,建议从1开始依次排序;名称:自定义,建议包含所码垛产品的相关信息,这样便于识别当前工作流所调用的产品;点击动作-新建,在编号框中输入1,名称框中输入P600_400_300*2;选中该工作流,点击继续,进行该工作流中各个跺型的相关设置;产品名称:设置所调用的产品名称;层型编号:设置所调用产品的层型样式编号;高度修正:设置该层在高度方向的修正;默认设置中层型之间的高度差等于产品的高度值,码垛过程中若发现各层之间高度需要调整,可通过此数据进行补偿;注意:单个工作流中最多设置4个托盘工位,即4个垛型;一个垛型中最多设置10层,最多包含200个工件;本案例中我们需要配置2个垛型;首先配置垛型1;第1层调用产品P600_400_300的层型样式1,无高度修正;第2层调用产品P600_400_300的层型样式2,无高度修正;第3层调用产品P600_400_300的层型样式1,无高度修正;配置完成后如下图所示;设置完成之后,需要针对此托盘工位示教相关基准位置,确认当前所选中的垛型选项卡,可进行对应的基准示教;我们所需示教的基准点共分为3组:目标点示教:包含拾取点PICK、HOME点、中间过渡点、拾取高度、放置高度;用于设置码放轨迹;工件坐标系:包含X1点、X2点、Y1点、码放原点P0;用于标定坐标系以及原点位置;工具坐标系:包含基准位置、180度旋转位置;用于标定工具中心偏移;所使用的垛型均必须示教基准点,例如本案例中,1个输入线、2个托盘工位,则我们将其视为2个独立的垛型;必须分别示教完所有目标点之后才能使用;本案例中虽然只有1个输入线,但是拾取点仍然需要示教2次,则分别在垛型1和垛型2中分别进行示教,当前我们将机器人移动至拾取点后,先进入垛型1中进行拾取位置示教,然后切换到垛型2中再次示教;所有垛型共享一个HOME位置,在所使用的任何一个垛型中示教HOME点均可,最终HOME点以最后一次示教的为准;示教目标点:PICK:拾取工件基准点,点击按钮即可完成位置记录;HOME:机器人工作原位,建议高于跺型最高位置,击按钮即可完成位置记录;拾取高度:拾取前后的抬高高度,只需输入数值,建议大于产品高度200mm以上;M1\\2\\3:中间过渡点,最多设置3个中间点,灰色为未使用,绿色为使用,通过按钮进行状态切换;放置高度1:放置前高度,建议等于拾取高度;放置高度2:接近前的高度,只需输入数值,建议为产品高度的一半;放置高度3:接近后的高度,建议在100mm以内,若设为0则表示码放时直接斜向运动至放置位置;①将机器人移至工件拾取点,点击PICK按钮进行记录;②将机器人移至工作原位,点击HOME按钮进行记录;③设置拾取高度以及放置高度④设置中间过渡点;若拾取位置到放置位置中间有障碍物,需要添加中间点予以避让,则可将机器人移至合适的中间过渡位置,点击M1\\M2\\M3进行示教,即最多支持3个中间过渡点;此案例中拾取与放置位置之间无障碍物,无需设置中间点,所以此处不予以设置;设置完成之后,点击右下角的完成;示教工件坐标系:坐标系构成原理:X1X2方向为X轴正方向,Y1方向为Y轴正方向,P0为原点;将机器人依次移至X1、X2、Y1、P0,并点击对应按钮进行记录:X1:X2:Y1:P0:记录完成之后,点击完成;。

abb机器人ctime的用法1. 介绍abb机器人及ctime软件abb机器人是一种工业机器人,可用于各种生产领域,如汽车制造、电子产品生产、食品加工等。
而ctime是abb机器人的控制软件,它可以让用户轻松地编程、监控和管理abb机器人的运行。
2. ctime的基本功能ctime软件拥有丰富的功能,包括:- 编程功能:用户可以使用ctime软件编写机器人运行的程序,实现不同的动作和任务。
- 监控功能:用户可以通过ctime软件监控机器人的运行状态,实时了解机器人的工作情况。
- 管理功能:用户可以通过ctime软件管理多台机器人,对其编程、调度和运行进行统一管理。
3. ctime的安装和配置在使用abb机器人的过程中,首先需要安装并配置ctime软件。
安装ctime软件需要按照abb冠方提供的安装步骤进行,确保安装的过程中没有发生任何错误。
配置ctime软件时,需要输入机器人的基本信息,如IP位置区域、通讯端口等,以便ctime能够与机器人进行通讯。
4. ctime的编程功能编程是abb机器人运行的关键,而ctime软件为用户提供了简洁、易懂的编程界面。
用户可以通过ctime软件选择不同的动作和运动轨迹,对机器人的运行进行编程。
ctime软件支持多种编程方式,如基于位置的编程、基于事件的编程等,满足不同用户的编程需求。
5. ctime的监控功能监控机器人的运行状态对于生产过程至关重要,而ctime软件提供了直观的监控界面。
在运行时,用户可以通过ctime软件实时查看机器人的当前位置、速度、负载等信息,及时发现运行中的问题并进行调整。
用户还可以在ctime软件中查看机器人的历史运行记录,进行分析和优化。
6. ctime的管理功能在工业生产中,通常会有多台abb机器人同时运行,而ctime软件可以帮助用户对多台机器人进行统一管理。
用户可以在ctime软件中创建不同的任务和排程,统一安排多个机器人的工作,提高生产效率。
ABB保护逻辑编写和PCM600软件使用方法详解一、概述1、ABB保护逻辑的编写﹡ABB保护逻辑的编写是在电学理论的基础上,通过PCM600调试软件内的逻辑模块的整合,再通过试验验证后,得出的。
﹡PCM600调试软件内的常用逻辑模块列举如下表:逻辑模块的详细解读,请参照ABB技术说明书。
根据各个模块的功能,依据现场实际情况可编写出相应的逻辑。
2、PCM600软件的应用PCM600软件主要应用于保护逻辑的编写、通讯点表的配置、从装置读出逻辑和输入逻辑的功能,具体应用步骤见第二部分PCM600软件的打开和保护装置新建。
二、PCM600软件的打开和保护装置新建1、软件打开:双击“PCM600 Engineering”2、新建站:单击左上角白色新建站单击“YES”在“Project name”下新建站名2、新建设备:单击鼠标右键“New”---“General”---单击“IED Group”称3、新建装置:单击右键“New”--“Feeder IEDS”—单击“REF615”选择“Offline configuration”---单击“Next”单击“Next”单击“Next”单击“Next”击“Close”单击“Next”单击“Finish”单击“确定”“Application Configuration”的编写,各个模块的详细讲解请看技术说明书和产品说明书。
Management”单击“OK”把“Not in use”改为“Default definitions”,然后保存,关闭。
Technical Key in IE D”单击“确定”选中“Technical Key in PCM600”---单击“OK”鼠标移到新建装置上,单击右键—单击“Updata plant structure”单击“确定”鼠标移到新建装置上,单击右键—单击“Write to IED”,等待进度条进行完毕,显示“success”时,说明输入装置内的逻辑已经完成。
ABB保护逻辑编写和PCM600软件使用方法详解一、概述1、ABB保护逻辑的编写﹡ABB保护逻辑的编写是在电学理论的基础上,通过PCM600调试软件内的逻辑模块的整合,再通过试验验证后,得出的。
﹡PCM600调试软件内的常用逻辑模块列举如下表:标准模块配置逻辑模块的详细解读,请参照ABB技术说明书。
根据各个模块的功能,依据现场实际情况可编写出相应的逻辑。
2、PCM600软件的应用PCM600软件主要应用于保护逻辑的编写、通讯点表的配置、从装置读出逻辑和输入逻辑的功能,具体应用步骤见第二部分PCM600软件的打开和保护装置新建。
二、PCM600软件的打开和保护装置新建1、软件打开:双击“PCM600 Engineering”2、新建站:单击左上角白色新建站单击“YES”在“Project name”下新建站名2、新建设备:单击鼠标右键“New”---“General”---单击“IED Group”鼠标移动到新建设备上,单击鼠标左键,修改和开关柜对应的名称3、新建装置:单击右键“New”--“Feeder IEDS”—单击“REF615”选择“Offline configuration”---单击“Next”单击“Next”单击“Next”单击“Next”选择和装置相对应的序列号,单击“Generate”—稍等片刻,单击“Close”单击“Next”单击“Finish”单击“确定”4、逻辑的编写:鼠标移动到新建装置上,单击右键—单击“Application Configuration”显示逻辑编写区域,可根据现场需要采用不同保护模块完成逻辑的编写,各个模块的详细讲解请看技术说明书和产品说明书。
5、通讯点的配置:单击鼠标右键—单击“Communication Management”单击“OK”把“Not in use”改为“Default definitions”,然后保存,关闭。
6、把逻辑输入装置内:鼠标移到装置上,单击右键—单击“Set Technical Key in IED”单击“确定”选中“Technical Key in PCM600”---单击“OK”鼠标移到新建装置上,单击右键—单击“Updata plant structure”单击“确定”鼠标移到新建装置上,单击右键—单击“Write to IED”,等待进度条进行完毕,显示“success”时,说明输入装置内的逻辑已经完成。
ABBPCM600软件使用方法详解首先,安装ABBPCM600软件。
将光盘插入计算机光驱,打开光盘,运行安装程序。
按照提示一步步进行安装,直到安装完成。
安装完成后,双击桌面上的ABBPCM600图标打开软件。
进入软件后,点击“新建”按钮创建一个新的配置文件。
在配置文件管理界面,点击“新建配置文件”,填写相关信息,点击“保存”。
接下来,选择你想要配置的设备。
点击“新建装置”按钮,在装置属性界面中选择设备类型,填写设备名称等信息,然后点击“保存”。
进入设备配置界面后,我们可以开始配置设备参数。
首先,在设备参数设置界面,选择配置项。
例如,选择“电流变压器配置”,填写电流变压器的参数信息,如变比、额定电压等。
然后点击“保存”。
接下来,在继电器保护配置界面,选择要添加的保护功能,例如过电流保护、距离保护等。
填写相关参数信息,点击保存。
除了配置设备参数外,ABBPCM600软件还具有设置通信参数的功能。
点击“通信配置”按钮,在通信参数设置界面中,选择通信协议、串口参数等,然后点击“保存”。
在配置完成后,点击“导入导出”按钮,可以导入导出配置文件。
点击“导入配置文件”,选择要导入的配置文件,点击“打开”。
然后点击“导出配置文件”,选择要导出的配置文件路径,点击“保存”。
除了配置文件的导入导出外,ABBPCM600软件还具有数据同步的功能。
点击“数据同步”按钮,在数据同步界面中选择要同步的设备,然后点击“同步”。
最后,点击“执行”按钮,将配置文件应用到设备上。
在执行界面中,选择要执行的操作,如读取设置、写入设置等,然后点击“执行”。
ABB 615系列逻辑编程软件PCM600调试文档目录1、安装 (3)1.1 打开PCM600V2.6安装程序 (3)1.2 按照提示点击“Next”逐步进行安装 (3)1.3 选择相应的组件 (3)1.4 选择安装类型 (3)1.5 按照提示进行软件安装 (4)1.6 安装SQL Server 2008 (4)1.7 完成PCM600安装 (4)1.8 安装链接包 (4)1.9 安装中文包 (5)2、使用 (5)2.1 设置语言 (5)2.2 界面调整 (6)2.3 新建设备 (6)2.4 设置技术键 (9)2.5 读取装置/写入装置 (10)2.6 定值整定 (11)2.7 应用配置 (12)2.8 导入/导出 (13)1、安装1.1 打开PCM600V2.6安装程序1.2 按照提示点击“Next”逐步进行安装1.3 选择相应的组件a.Protection and Control IED Manager PCM600为整定程序,必须勾选;b.Generic IEC61850 IED Connectivity Package是设备IEC61850规约通讯组件,建议勾选;c.Adobe Reader X是说明文档PDF阅读器,若有需要也可以勾选,已经由PDF阅读器则可以不装;d. Wavewin ABB是ABB的故障录波分析软件,视现场情况选择。
1.4 选择安装类型建议选择“Typical”,即典型安装方式。
1.5 按照提示进行软件安装1.6 安装SQL Server 2008PCM600逻辑编程软件依赖于SQL数据库,在安装过程中会自动安装SQL2008并自动命名为。
若已经安装了SQL2008数据库的电脑则会有相应提示,直接采用本电脑的SQL2008数据库即可。
1.7 完成PCM600安装安装完成后,在桌面上会形成一个PCM600的图标1.8 安装链接包每种ABB 615系列装置,都有相应的设备链接包,在使用之前需要先了解现场相应的设备型号,如REF 615/REM 615等,安装相应的设备链接包。
A B B保护逻辑编写和P C M600软件使用方法详解
一、概述
1、ABB保护逻辑的编写
﹡ABB保护逻辑的编写是在电学理论的基础上,通过PCM600调试软件内的逻辑模块的整合,再通过试验验证后,得出的。
﹡PCM600调试软件内的常用逻辑模块列举如下表:
场实际情况可编写出相应的逻辑。
2、PCM600软件的应用
PCM600软件主要应用于保护逻辑的编写、通讯点表的配置、从装置读出逻辑和输入逻辑的功能,具体应用步骤见第二部分PCM600软件的打开和保护装置新建。
二、PCM600软件的打开和保护装置新建
1、软件打开:双击“PCM600Engineering”
2、新建站:单击左上角白色新建站
单击“YES”
在“Projectname”下新建站名
2、新建设备:单击鼠标右键
“New”---“General”---单击“IEDGroup”
鼠标移动到新建设备上,单击鼠标左键,修改和开关柜对应的名称
3、新建装置:单击右键“New”--“FeederIEDS”—单击“REF615”
选择“Offlineconfiguration”---单击“Next”
单击“Next”
单击“Next”
单击“Next”
选择和装置相对应的序列号,单击“Generate”—稍等片刻,单击“Close”
单击“Next”
单击“Finish”
单击“确定”
4、逻辑的编写:鼠标移动到新建装置上,单击右键—单击“ApplicationConfiguration”
显示逻辑编写区域,可根据现场需要采用不同保护模块完成逻辑的编写,各个模块的详细讲解请看技术说明书和产品说明书。
5、通讯点的配置:单击鼠标右键—单击“CommunicationManagement”
单击“OK”
把“Notinuse”改为“Defaultdefinitions”,然后保存,关闭。
6、把逻辑输入装置内:鼠标移到装置上,单击右键—单击“SetTechnicalKeyinIED”
单击“确定”
选中“TechnicalKeyinPCM600”---单击“OK”
鼠标移到新建装置上,单击右键—单击“Updataplantstructure”
单击“确定”
鼠标移到新建装置上,单击右键—单击“WritetoIED”,等待进度条进行完毕,显示“success”时,说明输入装置内的逻辑已经完成。
三、逻辑编写实例
现以REF615为例,编写一个完整的速断保护
打开逻辑编写区域,在空白处单击右键---单击“InsertFunctionBlock”
单击“电流保护”
选中“PHIPTOC1”—单击“Insert”
单击“Assign”
选中新建的模块单击右键—单击“SetUserDefinedName”
输入中文保护名称“速断保护”—单击“OK”
在空白处单击右键—选中“InsertVariable”—单击Output“”
输入保护模块名称外加要引的针脚名称“PHL_OPERATE”(建议用英文或汉语拼音)
连接“动作”针脚和输出箭头
同样的方法连接“启动”针脚和对应的输出箭头
在空白处单击右键—单击“InsertHardwareChannel”
双击“BinaryOutput”
选择图纸给定的出口,假设是X100/PO1,单击“OK”
连接保护模块动作针脚和出口X100-PO1
同样的方法选则“LEDS”
单击“OK”
鼠标移动到LED1的黑点处,鼠标变成手型,单击右键—“Connect”—“Variable”—“Existing”
单击“Existing”
选中“PHI_OPERATE”—单击“Select”
同样的方法在录波通道模块“RDRE”针脚1上单击右键
单击“Existing”选中“PHI_OPERATE”,在针脚2上选中“PHI_START”
到此,速断保护逻辑的跳闸出口、指示灯和录波的编写已经完成,然后保存逻辑,关闭逻辑编写区域,可以把编好的逻辑输入到装置内。
(可参照
PCM600软件的应用进行输入)
(完)。