四自由度运动平台
- 格式:docx
- 大小:1.87 MB
- 文档页数:22
六自由度平台控制流程
一、设计阶段
1.确定平台运动范围
(1)确定平台的工作空间尺寸
(2)确定平台的最大移动范围
2.选择控制系统
(1)确定控制系统的类型
(2)选择适合的控制器
二、运动学建模
1.建立平台的运动学模型
(1)确定平台的坐标系
(2)建立运动学方程
2.运动学分析
(1)分析平台的各个自由度运动关系
(2)计算各关节的运动学参数
三、控制器设计
1.PID控制器设计
(1)确定PID控制器参数
(2)进行闭环控制设计
2.轨迹规划
(1)设计平台的运动轨迹
(2)确定平台的运动速度和加速度
四、软硬件实现
1.编写控制程序
(1)使用编程语言编写控制算法(2)软件实现运动控制
2.硬件连接
(1)连接传感器和执行器
(2)配置控制器和驱动器
五、系统调试
1.运动测试
(1)进行平台的手动控制测试
(2)检查各个自由度的运动是否正常2.控制效果验证
(1)进行自动控制测试
(2)验证控制效果和精度
六、性能优化
1.参数调整
(1)调整控制器参数
(2)优化控制算法
2.系统稳定性分析
(1)进行系统稳定性分析(2)确保平台运动稳定可靠。
一种的4自由度全柔性机构的设计和分析作者简介:胡卫华(1969-),男,助工,研究方向:机械制造与机构学。
微动机器人是目前器人研究领域中的热点课题之一。
微动机器人运动精细,可达亚微米甚至纳米级的定位精度,在生物、医疗科学、微细加工、航空航天等领域有着广阔的应用前景。
为此设计分析满足特定要求的新型微动机器人机构就显得尤为重要。
设计一种的4自由度4-RRUR全柔性机构并对其进行了运动学分析、静态结构分析和模态分析。
标签:微动机器人;柔性铰链;4-RRUR全柔性机构;有限元分析1概述柔性机构作为一种高精度的位移传递机构,广泛地应用于各种微位移平台,已成为国内外研究的热点。
而柔性铰链式微位移机构具有结构紧凑、体积小、无机械摩擦、无间、无爬行、机械谐振频率高、抗震动干扰能力强等优点,采用压电陶瓷驱动器进行驱动则很容易实现高分辨率的位移。
全柔性机器人机构是一种具有复杂结构的柔性机构。
它通过用柔性铰链代替所对应的全部传统铰链,并利用柔性铰链的变形产生运动。
该类机构可设计成一体化的结构,进而在降低制造与装配成本的同时还可实现很高的定位精度。
2柔性铰链的选型与设计柔性并联机构是并联微动机器人的主要机构构型之一,在机构学领域,首先要讨论的一个问题就是机构结构即所谓的“型”,具有满足转角最大的椭圆型柔性转动副及相当于轴线相交于一点的两个转动副的虎克铰结构。
其结构图分别如图1和图2。
3一种的4自由度4-RRUR全柔性机构的设计与比较4-RRUR并联机构简图如图3所示。
该并联机构由一个定平台、一个动平台以及四个相同的支链对称放置构成。
其中每条支链有一个转动副和一个万向节并通过转动副分别与定平台和动平台连接,能实现X、Y、Z上移动和绕Z转动4个自由度运动。
图34-RRUR并联机构简图采用替换法将图3简图中的运动副用相应的柔性运动副替换。
柔性转动副采用椭圆弧切口、双轴形运动副及柔性虎克铰来代替简图中的运动副。
考虑使动平台实现4自由度明显运动,在柔性支链与动平台接触较近处的转动副给出两种设计方案如图4所示。
【开题报告】四⾃由度机械臂的运动规划和搬运系统开题报告电⽓⼯程与⾃动化四⾃由度机械臂的运动规划和搬运系统⼀、主要任务与⽬标:任务:设计四⾃由度的机械臂具有三个旋转关节和⼀个平移关节,末端安装有⼀个电磁⼿⽖能够抓取物体的搬运系统。
⽬的:1、了解四⾃由度机械臂的机械和电⽓特性;2、学习机械臂运动学基础知识,能进⾏基本的运动学分析;3、学习和掌握⼀定的运动路径规划⽅法(如:梯形运动,S型曲线运动)实现从指定起始地点到⽬标地点的运动规划;4、在四⾃由度机械臂实验平台上实现多个物体从起始位置到不同⽬标位置的搬运和摆放。
拟解决的主要问题:1、针对全⾃动机械⼿中“臂”机构进⾏研究,争对四⾃由度机械臂的机械和电⽓特性,建⽴与之相应的机械臂运动型模型;2、在建⽴的机械臂运动路径模型基础上,进⾏基本的运动学分析以及总结出运动路径的规划。
3、使⽤运动路径的算法计算出机械臂的运动路径,实现从指定起始地点到⽬标地点的运动规划。
4、在四⾃由度机械臂实验平台上编程实现多个物体从起始位置到不同⽬标位置的搬运和摆放。
⼆、理论依据、技术问题、研究价值理论依据:19世纪末以来,为了适应不同⽣产需要、完成不同动作的各种机器相继出现并⼴泛使⽤,于是,机构学应运⽽⽣。
机构学的任务是分析机构的运动规律,根据需要实现的运动设计新的机构和进⾏机构的综合。
现代仪器和⾃动化技术的发展⼜促进机构学的进⼀步发展,提出了各种平⾯和空间机构运动分析和综合的问题。
运⽤控制理论的基本原理来解决机械⼯程中的实际技术问题。
技术问题:1、根据机械臂模型的建⽴进⾏机构的设计。
具体的包括运动副型式的合理选择和配置。
传递运动的最佳路线,驱动的最佳速⽐等。
机构设计不合理,可能会出现臂杆的相互⼲涉或驱动装置⽆法运⾏,机构不能运动等问题2、根据简单点到点运动算法计算出机械臂可达空间的范围。
根据设计要求和满⾜各种⼯作的需要,机器⼈前端应能到达⼯作需要的范围内的各个位置,并且基本上没有死区。
多自由度平台控制系统解析摘要:介绍一种由大搭接量电液比例方向阀闭环控制的三自由度模拟舰船平台。
对该平台的结构、电气控制及控制软件作了详细介绍。
研究结果表明,充分利用计算机控制的特性及软件资源,由大搭接量电液比例方向阀构成的闭环控制系统,也可以获得良好的控制性能。
关键词:多自由度平台;电液比例控制;计算机控制舰船在海洋中航行遇到大风大浪时,会造成造舰船的大幅振荡和摇摆,导致人员的眩晕或呕吐。
因此研究如何对有关人员进行陆上的海上训练以及抗眩晕研究,特别是对需要在海上进行短期生活的人员,例如渡海作战的士兵、旅游者进行科学的抗眩晕划”练是有必要的。
为此,我们利用了计算机控制的电液比例控制系统,研制了一个模拟舰船平台,用于在室内模拟舰船在强烈风浪下的海上环境,实验人员坐在一个放置在平台上的模拟的船仓内,感受模拟风浪作用,以便研究人员的身体反应及进行抗眩晕研究。
本研究平台的应用场合,要求有较好的连续运动控制特性,但只需要有一般的控制精度。
在构成这类闭环位置控制系统时,人们首先想到的是利用具有零开口的伺服阀。
它们没有死区,有较好的线性。
但它们价格昂贵,对油液的污染度要求很高,限制了它们在一般场合的广泛应用。
如果选用普通的电液比例阀,它对工作环境要求不高,其价格也较低,容易被接受。
但由于这类比例阀有很大的死区,通常可达最大工作电流的四分之一。
因此,在零位附近其控制特性较差,经常出现动作迟缓和停顿的现象。
这些缺点使得有大死区的普通比例阀如比例方向阀很难构成性能良好的闭环控制系统。
一、多自由度运动平台机械设计方案常见的多自由度运动平台机械结构多设计为Stewart型,但是Stewart型的多自由度运动平台的设计与加工十分复杂,控制系统设计也复杂,体积庞大,价格十分昂贵,少则几十万,多则上百万一台。
本文根据六自由度舰船模拟平台的技术要求,并结合实际情况,在误差允许的前提下设计了多自由度运动平台的机械结构和运动控制系统。
民用飞机工程模拟器设计作者:涂相征来源:《软件导刊》2015年第01期摘要:飞机工程模拟器是人在回路的飞机半实物仿真平台,贯穿于飞机系统研制的各个阶段。
在飞机研制的不同时期,工程模拟器都可以配合飞机研制实现相应的试验和验证功能。
视实际用途的不同,飞机工程模拟器有带运动系统和不带运动系统两种,介绍了具有一定自由度带运动平台的工程模拟器方案设计。
关键词:飞机工程模拟器;六自由度运动系统;仿真平台DOIDOI:10.11907/rjdk.143483中图分类号:TP319文献标识码:A 文章编号文章编号:16727800(2015)0010103020 引言在飞机系统设计初期,工程模拟器可用于飞行控制律、飞行控制系统功能的初步设计与验证;在系统详细设计阶段,工程模拟器可用于飞行控制律的详细设计与验证、飞行品质的评估、飞行控制系统功能的详细设计与验证等;在系统设计后期,工程模拟器可用于驾驶员在环试验、部分适航符合性试验、系统功能危害性试验以及机组培训等,视实际用途的不同,飞机工程模拟器有带运动系系统和不带运动系统的。
具有一定自由度的带运动平台模拟器,不仅为飞行员和操纵者提供了飞行控制环境,还提供了飞机对人员操纵响应过程的加速度、速度和位置等运动感觉。
因此,更有利于飞行体验,并提高对飞行品质评定结论的置信度。
本文将着重介绍带六自由度运动平台的工程模拟器设计,其效果见图1。
1 工程模拟器总体设计飞机工程模拟器[1]贯穿于飞机系统研制的各个阶段,提供飞机不同阶段的工程应用环境,同时为飞行员提供逼真的飞行环境。
工程模拟器具有人在回路的半实物仿真特点,具备以下功能:①工程试验的仿真与验证;②飞行员在环仿真验证;③机组初步培训;④支持飞机改型设计。
工程模拟器目前尚没有明确的标准,其设计可参照CCAR60 部的D 级飞行训练模拟器标准,亦可根据实际需要进行适当调整。
图1 工程模拟器设计2 工程模拟器总体设计2.1 整机组成飞机工程模拟器基本上由以下12个分系统[24]组成:①驾驶舱结构与驾驶舱设备仿真系统;②主飞行仿真系统;③航电仿真系统;④视景系统;⑤六自由度运动系统;⑥操纵负荷系统;⑦声音仿真系统;⑧综合控制台系统;⑨硬件接口系统;⑩计算机实时仿真及网络系统;B11工程师平台;B12环境与支持系统。
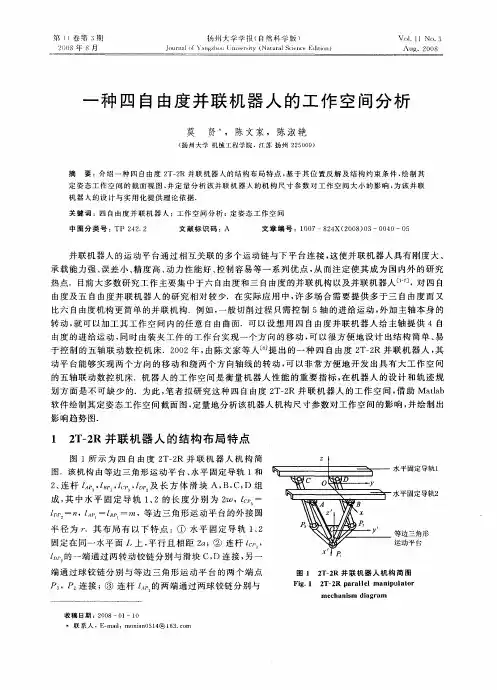
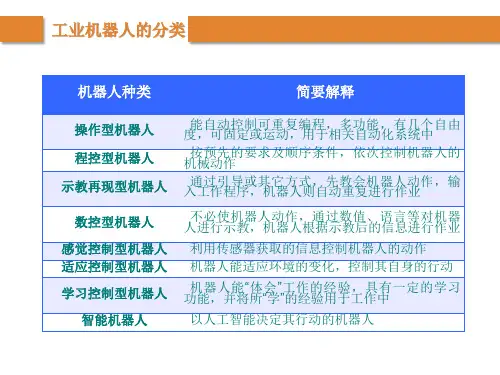
四自由度Delta机械手运动学逆解研究童明浩;王君【摘要】并联机器人的运动学分析是研究并联机构的基础.为使Delta四自由度机械手达到完成工作的目的,根据Delta并联机械手的特点,改进了两种四自由度Delta机器人设计,简化模型,建立数学模型及运动方程,推算出运动学逆解公式.根据机械手末端执行器的位置和姿态,得到伺服电机需要转动的转角.【期刊名称】《湖北工业大学学报》【年(卷),期】2016(031)001【总页数】4页(P42-45)【关键词】并联机器人;运动学;逆解【作者】童明浩;王君【作者单位】湖北工业大学机械工程学院,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068【正文语种】中文【中图分类】TH12工业机械手(又称工业机器人)根据结构形式可以分为并联机械手和串联机械手两大类,串联机械手电机安装在运动关节处,惯量负载较大,在高速运行中易产生振动和细微形变,影响末端执行器的精度;并联机械手电机安装在固定机架上,并且一般以质量较轻的碳纤维材料作为手臂,因此在较高的速度和加速度下可保证末端执行器的精度,对机械手系统的运动性能有显著的提高。
实际生产中,需要高速搬运工作场合一般使用并联机构。
Delta机械手属于并联机械手,它的运动副由3个移动副和1个转动副组成。
因此,对Delta并联机器人的研究成为工业机器人研究的一个重要领域[1-4]。
传统的四自由度并联机械手的3个电机分别控制3个大臂运动,由中间的旋转轴控制末端执行器的旋转[4-7]。
新型四自由度并联机构(如H4型、Par4型机器人)是近年来发明的一种Delta结构。
Delta并联机器人中的复合运动结构使机器人的工作效率高于一般的串联机器人,但同时使其理论研究趋向复杂[8]。
对于经典四自由度Delta机械手已有较多研究,但对于运动学逆解求解方式普遍较为繁琐。
新型四自由度高速机械手省去了中间的旋转轴,动平台采用平行四边形结构,在电机运动中可实现旋转,因此运动更加快速,其运动学逆解计算同步过程也更为复杂[9-12]。
delta机械臂结构组成Delta机械臂结构组成Delta机械臂是一种常见的并联机器人,它的结构组成主要包括底座、运动平台、连杆以及关节等部分。
本文将围绕这些部分展开介绍,并对其功能和作用进行说明。
一、底座底座是Delta机械臂的基础部分,通常由坚固的金属材料制成,以提供稳定的支撑和固定机械臂的其他部分。
底座上通常还会安装电机、减速器等驱动装置,用于控制机械臂的运动。
二、运动平台运动平台是Delta机械臂的核心部分,由三个平行连杆和一个平行四边形连接构成。
这些连杆通过球节等连接件连接在一起,形成一个平面内的平行四边形结构。
运动平台的主要功能是支撑末端执行器,同时可以通过连杆的运动实现机械臂的各个自由度。
三、连杆连杆是Delta机械臂的重要组成部分,通常由轻质而坚固的材料制成,如铝合金等。
连杆有不同的长度,通过连接在运动平台和关节上,实现机械臂的运动。
连杆的长度和角度的变化可以改变机械臂末端执行器的位置和姿态。
四、关节关节是连接连杆和运动平台的部件,通常由球节等连接件构成。
关节的主要作用是使连杆可以在不同的角度和方向上运动,从而实现机械臂的多自由度控制。
关节通常由电机和减速器驱动,通过运动控制系统控制其运动。
Delta机械臂的结构组成使其具有以下特点和优势:1. 高速度和高加速度:由于Delta机械臂采用并联结构,可以通过运动平台的连杆运动实现高速度和高加速度的控制,从而提高机械臂的工作效率。
2. 高精度和高重复性:Delta机械臂的结构紧凑,连杆和关节的设计精度高,可以实现较高的定位精度和重复性,适用于许多精密操作领域。
3. 较大的工作空间:Delta机械臂的运动平台可以在一个平面内自由运动,因此具有较大的工作空间,可以适应不同的工作需求。
4. 较好的刚性和稳定性:Delta机械臂的结构紧凑,运动平台和连杆的连接紧密,具有较好的刚性和稳定性,可以承受较大的负载和外部力。
总结:Delta机械臂的结构组成包括底座、运动平台、连杆和关节等部分,每个部分都承担着特定的功能和作用。
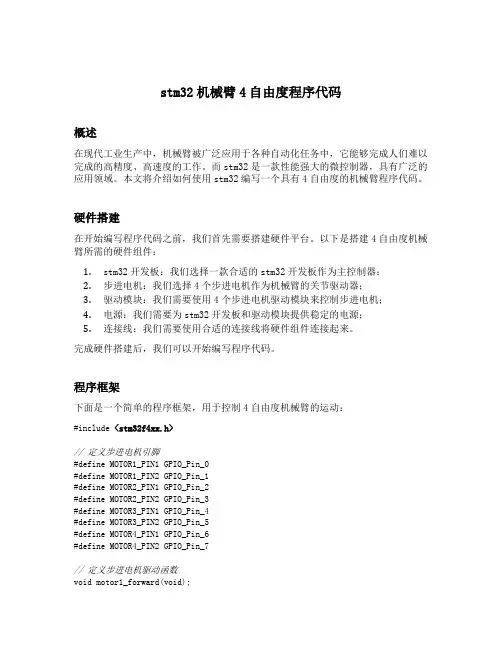
stm32机械臂4自由度程序代码概述在现代工业生产中,机械臂被广泛应用于各种自动化任务中,它能够完成人们难以完成的高精度、高速度的工作。
而stm32是一款性能强大的微控制器,具有广泛的应用领域。
本文将介绍如何使用stm32编写一个具有4自由度的机械臂程序代码。
硬件搭建在开始编写程序代码之前,我们首先需要搭建硬件平台。
以下是搭建4自由度机械臂所需的硬件组件:1.stm32开发板:我们选择一款合适的stm32开发板作为主控制器;2.步进电机:我们选择4个步进电机作为机械臂的关节驱动器;3.驱动模块:我们需要使用4个步进电机驱动模块来控制步进电机;4.电源:我们需要为stm32开发板和驱动模块提供稳定的电源;5.连接线:我们需要使用合适的连接线将硬件组件连接起来。
完成硬件搭建后,我们可以开始编写程序代码。
程序框架下面是一个简单的程序框架,用于控制4自由度机械臂的运动:#include <stm32f4xx.h>// 定义步进电机引脚#define MOTOR1_PIN1 GPIO_Pin_0#define MOTOR1_PIN2 GPIO_Pin_1#define MOTOR2_PIN1 GPIO_Pin_2#define MOTOR2_PIN2 GPIO_Pin_3#define MOTOR3_PIN1 GPIO_Pin_4#define MOTOR3_PIN2 GPIO_Pin_5#define MOTOR4_PIN1 GPIO_Pin_6#define MOTOR4_PIN2 GPIO_Pin_7// 定义步进电机驱动函数void motor1_forward(void);void motor2_forward(void); void motor2_backward(void); void motor3_forward(void); void motor3_backward(void); void motor4_forward(void); void motor4_backward(void);int main(void){// 初始化stm32开发板// 初始化步进电机引脚while (1){// 控制机械臂的运动 }}void motor1_forward(void) {// 控制步进电机1正转}void motor1_backward(void) {// 控制步进电机1反转}void motor2_forward(void) {// 控制步进电机2正转}void motor2_backward(void) {// 控制步进电机2反转}void motor3_forward(void) {// 控制步进电机3正转}{// 控制步进电机3反转}void motor4_forward(void){// 控制步进电机4正转}void motor4_backward(void){// 控制步进电机4反转}程序详解初始化stm32开发板在程序的main函数中,我们需要初始化stm32开发板。
(一)
六自由运动平台介绍
六自由度液压平台技术参数
六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,
借助六只油缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ, X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动
数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是液压和控制领域水平的标志
性象征。
主要包括平台的空间运动机构、空间运动模型、液压系统、控制系统。
1 六自由度平台空间机构技术参数
六自由度平台结构效果图如图1所示。
图1 六自由度平台
六自由度运动平台由上下平台和六个液压油缸组成。
六个液压缸上端点两两组成上平台三个支点,六个液
压缸下端点两两组成下平台三个支点。
上下三个支点分别在假设的圆周上,并且是120o等分,既分别是两个等边三角形的顶点。
根据不同的运动范围,油缸的行程和上下平台半径不同。
结构如图2所示。
图2 六自由度平台结构图
根据标书要求,六自由度平台结构参数如下:
上平台半径: 0.8m;。
delta机器人工作原理Delta机器人工作原理Delta机器人是一种特殊类型的工业机器人,主要用于高速、高精度运动的应用场景,如装配、包装、拣选和加工等。
Delta机器人具有优异的速度、精度和稳定性,成为了许多工业生产线上不可或缺的重要工具。
那么,Delta机器人工作原理是什么呢?下面,我们来一步步解析。
一、Delta机器人的定义Delta机器人是一种由三个并联机械臂组成的运动平台机器人,其中一个跟随其中一个轴线固定且相互垂直的臂作为基础,还有两个直线型平移臂相对地连在基础臂的两旁,三个臂基于关节和连接处具有一定范围的转动和伸缩,从而带动末端执行器在三维空间内实现精准定位和高速运动。
二、Delta机器人臂的结构Delta机器人的三个臂都是由一系列小型的连杆和转动关节组成的,这些关节和连杆也称为连轴器,关节带动连杆转动,连杆的长度和调整可以控制机械臂的位置。
这个连杆和转动关节的结构既紧凑又坚固,具有较高的稳定性和承载能力。
三、Delta机器人运动原理Delta机器人的运动原理是基于三个运动平台的协同运动,每个平台内部由6个运动自由度(三个旋转和三个伸缩)构成,每个运动平台上装有弹性杆、转动关节和执行器,通过单独控制每个平台的状态来实现机器臂的高速和点精度运动。
其中,每个弹性杆安装在一个伸缩套筒上,并连接到运动平台的两个转动关节上,整个弹性杆组成一个三角形。
通过控制下方的三个伸缩套筒的深度调整三角形的形状,从而在三维空间内实现各种姿态和位置的改变。
当前三个运动平台的平面相交,可以实现更高层次的速度和精度控制。
四、Delta机器人的控制系统Delta机器人的控制系统主要由硬件和软件两部分组成,硬件包括运动平台、传感器、运动控制器和执行器等,而软件则是指运动学算法和路径规划算法。
其中,运动学算法是描述机器人姿态和位置的数学模型,可以通过传感器采集的数据信息,反推机器人的运动状态;路径规划算法则是根据物体的坐标和机器人对该物体的加工场景,生成机器人的动作路径,以完成某种加工工艺。
毕业设计(论文)题目模拟飞机驾驶舱运动控制机构设计专业工业工程班级工程123班学号**********学生方圆指导教师高峰职称教授二○一六年摘要本课题的研究对象是飞行模拟器运动控制机构的设计,但是实现其功能的是一个并联三自由度运动平台,作为运动控制机构的重要组成部分,它是实现飞行模拟器功能的运动载体,在本课题中主要是实现飞行模拟器的三个自由度运动的功能,即模拟飞行模拟器驾驶舱的升降、俯仰、滚转、偏航等运动姿态。
并联机构的机构研究学近几年发展迅速,愈来愈多的研究学者和该专业爱好者都投身于并联机构的研究中,尤其是少自由度并联机构的研究,随着其应用领域的扩展已逐渐成为该领域的热门课题之一。
因此随着并联机构研究的发展狂潮,学者们也开发出很多新型机构,这些新型机构还需要长时间的理论研究和工程实践中的应用才能进一步证明其结构的合理性和优越性,因此新机构还需要进行大量的综合研究,包括分析、设计、计算。
本课题主要研究对象是一种新型的四自由度并联机构,它与传统的六自由度并联机构相比,在很多方面都具有得天独厚的优势,尤其是在其结构设计、制造加工方面都相对简单且易控制;除此之外,该并联机构各分支完全相同、结构对称,在应用潜力方面是其他机构所不能相比的。
对于目前国内外少自由度并联机构的研究状况,通过查阅文献我们发现国内对二、三自由度并联机构的研究较多且形成了一定的理论基础,基本走向成熟阶段,并在很多领域都有广泛的应用,而国内对四、五自由度并联机构的研究相对要欠缺很多,其主要原因是因为四、五自由度并联机构的研究相对较为复杂,而且起步较晚,研究成果也相对较少,故而在一定程度上限制了该类并联机构在实际工程中的发展和应用。
本课题基于此对目前已有的一种三自由度并联机构3-RPS的机构情况、某些运动特性进行了理论分析。
本课题对一种新开发的少自由度并联机构3-RPS进行了大量的理论分析,描述了机构的运动特性,根据螺旋约束理论求解了该并联机构的自由度,基于此理论可以进一步判别机构的输入选取能否确定实现工作平台的输出,进而判断输入选取是否合理;其次,分析了3-RPS并联机构的运动学,参考螺旋约束理论推导出了位置反解的算法,带入进行了数值验证。
最后,用solidedge三维绘图软件对3-RPS并联机构绘图和装配。
本论文的工作主要是为了进一步研究三自由度并联机构的运动特性,在其工程实践领域奠定了一定的基础,也为今后在该领域的发展提供了一些理论上的支持。
关键词:并联机构;3-RPS机构;螺旋约束理论;运动学分析;AbstractAs motion-base of flight simulator, parallel three-DOF motion system is one of the chief part in the flight simulator. Its motion nature is one kind mechanism, which can provide heave, pitch, roll, yaw.The lower-mobility parallel mechanisms are presently hot topics in the field of robotics research. A lot of scholars have open out varieties of novel mechanisms. But before they enter into the field of actual engineering applications comprehensive investigations must be done. Spatial imperfect-DOF parallel robots have received much attention for the advantages of their simple mechanism, low cost in designing, manufacturing, and controlling, comparing with traditional six-DOF parallel mechanism. Especially symmetric imperfect-DOF parallel mechanism with identical branch, symmetric construction, isotropy have great applicable potentiality. The research of two, three-DOF parallel mechanism have basically been finished, however the research of four, five-DOF parallel mechanism just begin, which limit the development and application of this kind of parallel mechanism to some extent. In this dissertation, some kinematics characteristics of one three-DOF parallel mechanism that have existed are theoretically studied.In this paper firstly a new type lower-mobility parallel symmetrical mechanisms-3-RPS has been discussed chiefly including its mechanistic characteristic and its motion based on screw theory. The accuracy of choosing input is considered. Secondly, the kinematics of the four-DOF parallel mechanism are developed. The solution of the inverse position kinematics and corresponding numerical examples are given. Finally, the kinematics of the three-DOF parallel mechanism is simulated by using ADAMS.The research work of this thesis establishes theoretical basis for the further research of the three-DOF parallel mechanism practically and given the theoretical support for the future application.目录第1章绪论 (5)1.1研究的背景及意义 (5)1.2六自由度并联机构研究概况 (6)1.3少自由度并联机构研究概况 (8)1.4少自由度并联机构的发展前景 (9)第2章基础知识介绍 (11)2.1坐标变换的基础一姿势矩阵的欧拉角表示法 (11)2.2并联机构的运动学分析 (13)2.3运动平台的自由度分析 (15)第3章并联机构4-RPUR的基础分析 (16)3.1引言 (16)3.2 4-RPUR的结构与约束特征 (16)3.3 运动学分析.................................. 错误!未定义书签。
3.4并联机构的位置反解分析....................... 错误!未定义书签。
3.5机构的约束情况............................... 错误!未定义书签。
3.6数值分析..................................... 错误!未定义书签。
第4章总结与展望. (20)参考文献 (21)致谢 (22)第1章绪论1.1研究的背景及意义飞行模拟器按顾名思义就是可以模拟飞行器飞行的设备,它与真实的飞行器相比,能很大程度上模拟出飞行器在空中的飞行状态,基于此种特性,飞行模拟器近几年已经被广泛的应用在各种飞行试验和娱乐设施中了,这样就大大的提高了飞行试验方面的安全性和经济性,因此对于飞行模拟器的研究据有很大的现实意义。
飞行模拟器作为一种重要的航空航天仿真设备【1】,其最大的优势是可以实现在地面上很大程度地模拟出飞行器在空中的飞行状态,同早年用真实飞机进行实际的飞行试验相比,在安全、经济、可靠性方面都要远高于真实的飞行器,更重要的是,它的仿真几乎完全是可控的。
现在的飞行试验基本都由飞行模拟器执行,特别是进行最危险的飞行科目训练,能够最大程度上的保护飞行员的人身安全,还可以避免了飞行设备的意外损坏,现在无疑是进行飞行试验的最佳途径。
目前,飞行模拟器已经能基本实现飞行器研究和飞行试验的功能,广泛地应用在飞行器的研究、设计、试验等各个方面,同时也是飞行员和航空员接触飞行训练和教学的主要途径。
因为不管气候条件有多么恶劣、训练场地多么狭小,都能在飞行模拟器上进行常规操作训练,还能处理一些事故以提升训练者的应变能力【2】,这样极大程度地提高了训练的效果和质量。
作为现代航空科学的重要组成部分,目前仍以高速的状态发展,在众多学者的研究下,其在该领域的发展也愈加成熟。
模拟飞机驾驶舱的运动控制机构是一个少自由度并联运动平台,而运动平台是在相应的运动模拟机构上,用来模拟仿真飞行器的运动特性的,运动平台的运动模拟功能可以大幅度降低航空、航天、航海等作业的训练成本,使航空航天事业多快好省的发展,近几年的研究发展也表明,运动平台在海陆空众多运载工具中扮演着极其重要的角色。
纵观现在的飞行训练,几乎所有的飞行试验都是在飞行模拟器上完成的。
在并联机构的几大应用领域中,运动平台是近几年新兴起来的。
反观其发展历史,之所以能发展如此迅速,正是由于并联机构的结构特点在其实践工程领域的优越性,具体来说,主要是它的结构简单、控制复杂多变,因此对并联机构各方面性能的研究将显得极其重要。
目前国内外学者对并联机构的研究领域极为广泛,其中对并联机构的运动学分析和机构学分析内容主要研究机奇异位形、工作空间等问题。
运动平台分为串联机构运动平台和并联机构运动平台,它们的运动方式在本质上有着根本的不同。