基于OpenCV的行人检测监控系统研究与实现
- 格式:pdf
- 大小:1.40 MB
- 文档页数:3
摘要行人检测技术是众多领域的基础技术之一。
例如无人驾驶汽车、智能视频监控和人体行为分析等领域。
在智能视频监控领域中,行人检测对系统的实时性和准确性都有较高的要求,然而两者往往不能兼得,在计算能力一定的硬件环境下,高实时性意味着准确性会有所降低,高准确性往往需要降低实时性来获取。
如何同时保证系统的实时性和准确性成为智能视频监控系统的一个难题。
近年来,随着深度学习技术的不断突破,该问题得到了一定程度的解决。
深度学习技术作为人工智能的一个子领域,在计算机视觉中取得了很好的效果,基于深度学习的行人检测系统就是智能视频监控系统的一种。
它是针对油井环境下的行人检测而设计和实现的系统。
该系统将DarkNet框架作为训练时所使用的框架,将Yolo v2作为训练时所使用的网络模型。
对客户提供的真实场景下的视频或图像数据进行标注和训练,将训练好的模型嵌入到四路智能分析设备TX1中,通过网络摄像头获取现场实时监控画面的视频数据,或者直接读取本地的视频数据,经过模型的处理得到视频画面中行人的位置信息,之后将视频信息以及检测结果传输到Web服务器,在网页端进行监控画面以及检测结果的显示。
服务器以及深度学习框架都是在Linux系统下运行的,用户只需打开一个浏览器输入系统IP地址,登录系统即可进行相应的操作。
基于深度学习的行人检测系统能够对获取到的实时监控数据和本地视频数据进行检测,并且能够达到一定的实时性和准确性。
用户操作方便,只需通过浏览器就可以整个系统进行操作。
该系统可以在网页端实时显示视频和检测结果,可以控制系统是否进行检测,可以设置检测结果所发送的目的IP地址等。
关键词:深度学习Yolo v2网络结构DarkNet框架行人检测AbstractPedestrian detection technology is one of the basic technologies in many fields.Such as unmanned vehicles,intelligent video surveillance and human behavior analysis.In the field of intelligent video surveillance,pedestrian detection in real-time and accuracy of the system have higher requirements,but they often have not,in the calculation of the ability of hardware environment,high real-time mean accuracy will be reduced,the high accuracy often need to reduce the real time to get.How to ensure the real-time and accuracy of the system at the same time has become a difficult problem in the intelligent video surveillance system.In recent years,with the continuous breakthrough of deep learning technology,this problem has been solved to a certain extent.As a subfield of artificial intelligence,deep learning technology has achieved good results in computer vision.Pedestrian detection system based on deep learning is one of the intelligent video surveillance systems.It is a system designed and implemented for pedestrian detection under the oil well environment.The system uses the DarkNet framework as the framework used in training and uses the Yolo V2as a network model used in training.The real scene to provide the video or image data were tagged and training,embedding models trained to four intelligent analysis device in TX1,access to the video data monitoring picture through the network camera,or directly read the video data locally,through model processing by the position information of video images of pedestrians then,the video information and the detection result is transmitted to the Web server,display monitoring screen and test results in the end of the page.The server and deep learning framework are running under the Linux ers just need to open a browser to input the IP address of the system,and login the system to do the corresponding operation.The pedestrian detection system based on deep learning can detect the real-time monitoring data and local video data,and achieve real-time and accuracy.The user is easy to operate,and the whole system can be operated only through the browser.The systemcan display video and test results in real time at the webpage end,control whether the system detects and set the destination IP address sent by the test result.Key words:Deep learning Yolo v2network structure DarkNet framePedestrian detection目录摘要 (III)Abstract (II)1绪论1.1研究背景 (1)1.2研究的目的和意义 (2)1.3国内外研究概况 (3)1.4主要工作 (4)2关键技术介绍2.1深度学习框架 (6)2.2深度学习网络Yolo v2 (7)2.3Gstreamer多媒体框架 (10)2.4本章小结 (11)3行人检测系统需求分析3.1系统需求分析总体概述 (12)3.2系统的功能性需求 (14)3.3系统的非功能性需求 (16)3.4本章小结 (17)4行人检测系统的设计4.1系统总体结构设计 (18)4.2系统概要设计 (20)4.3系统详细设计 (25)4.4本章小结 (30)5行人检测系统的实现与测试5.1系统开发运行环境 (31)5.2系统功能实现 (32)5.3系统测试 (41)5.4本章小结 (44)6总结与展望6.1全文总结 (45)6.2展望 (46)致谢 (47)参考文献 (48)1绪论1.1研究背景在工业界和人们的生活中计算机视觉技术的应用越来越广泛。
视频监控系统中的行人检测与追踪算法研究与应用摘要:随着科技的发展,视频监控系统在各个领域中得到了广泛的应用。
其中,行人检测与追踪算法是视频监控系统中的重要研究内容。
本文将探讨行人检测与追踪算法的研究现状以及在实际应用中的意义,并介绍基于深度学习的行人检测与追踪算法的常用方法和技术。
1. 引言视频监控系统已成为现代社会安全领域的重要手段之一。
为了提高视频监控系统的效果和工作效率,行人检测与追踪算法的研究成为一个重要的课题。
2. 行人检测算法的研究现状行人检测算法的研究主要分为两个阶段:基于传统机器学习的算法和基于深度学习的算法。
传统机器学习算法主要包括HOG+SVM、Haar Cascade等。
这些算法在行人检测中取得了一定的成果,但是在复杂环境下仍然存在准确率低和鲁棒性差的问题。
而基于深度学习的算法通过引入卷积神经网络(CNN)和循环神经网络(RNN)等技术,能够提高行人检测的准确率和鲁棒性。
3. 基于深度学习的行人检测与追踪算法基于深度学习的行人检测与追踪算法主要包括以下几种常用方法:(1)Faster R-CNN:通过引入区域建议网络(RPN)来生成候选框,然后对候选框进行分类和回归,实现行人检测和定位。
(2)YOLO:将行人检测任务视为一个回归问题,并通过单个网络直接预测候选框的位置和类别。
(3)SSD:结合了Faster R-CNN和YOLO的特点,通过卷积层和预测层来检测各个尺度的目标。
(4)MC-CNN:通过多通道卷积神经网络将不同尺度的信息整合,提高行人检测的准确性。
4. 行人追踪算法的研究现状行人追踪算法主要分为基于检测与跟踪的方法和基于特征的方法。
基于检测与跟踪的方法主要利用行人检测算法提取出的特征进行行人目标的跟踪,具有较高的准确率和鲁棒性。
基于特征的方法则通过提取行人目标在时间序列中的特征进行跟踪,可以实现更加精细的目标追踪。
5. 行人检测与追踪算法在实际应用中的意义行人检测与追踪算法在实际应用中具有广泛的意义。
监控视频中的行人识别与跟踪技术研究随着互联网和智能技术的迅速发展,监控视频技术在城市安全管理、交通监控、行人识别与跟踪等领域扮演着重要的角色。
行人识别与跟踪技术是指通过监控视频,准确地识别出视频中的行人,并能够在连续的帧中跟踪行人的移动轨迹。
这项技术在安全防控、犯罪侦查以及行人行为分析等方面具有重要的应用价值。
行人识别技术是实现行人跟踪的基础,其目的是从监控视频中准确地识别行人的位置和姿态。
在行人识别的过程中,需要解决以下几个关键问题:一、行人的检测:行人检测是指在监控视频中将行人目标与背景等其他因素准确地分离开来。
传统的行人检测方法主要基于图像特征提取和机器学习算法,如Haar特征、HOG(方向梯度直方图)特征等。
近年来,深度学习的发展极大地推动了行人检测的性能,特别是基于卷积神经网络的方法。
二、行人的识别:行人识别是指根据行人的外貌特征或身体结构特征,将其与数据库中的行人进行匹配,从而实现行人的个体识别。
行人识别方法主要有基于图像特征和基于深度特征的方法。
在行人识别任务中,基于深度学习的方法在准确性和鲁棒性方面更具竞争力。
三、行人的跟踪:行人跟踪是指在连续的监控帧中,准确地追踪行人目标的移动轨迹。
行人跟踪方法主要包括基于特征点的方法、基于轮廓的方法和基于深度学习的方法。
目前,基于深度学习的行人跟踪方法在目标匹配的准确性和鲁棒性方面取得了显著的进展,逐渐成为主流的研究方向。
行人识别与跟踪技术的发展,不仅在提高城市安全管理和犯罪侦查的能力方面发挥了重要作用,还在交通领域具有重要意义。
在交通监控系统中,行人识别与跟踪技术可以用于交通事故预警、行人行为分析等应用。
例如,在交通事故预警系统中,当监控视频中的行人突然出现在马路上时,系统可以及时发出警报,提醒司机注意。
此外,行人识别与跟踪技术在行人行为分析中也起到重要作用。
通过对行人的轨迹分析,可以研究行人的行为规律,为城市规划、交通优化等领域提供数据支持。
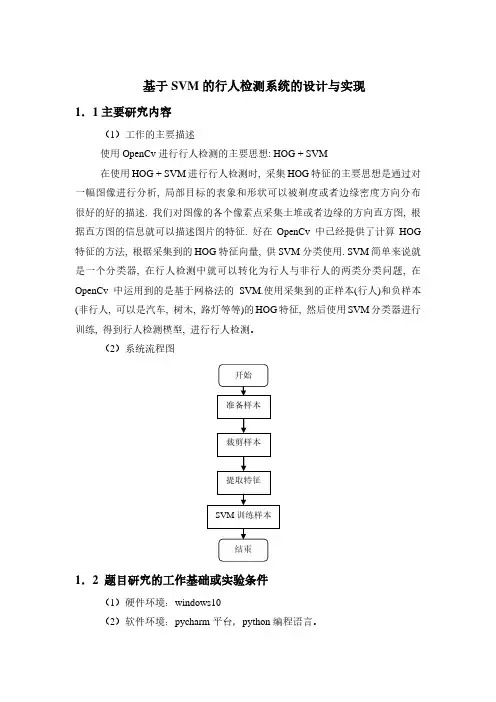
基于SVM的行人检测系统的设计与实现1.1主要研究内容(1)工作的主要描述使用OpenCv进行行人检测的主要思想: HOG + SVM在使用HOG + SVM进行行人检测时, 采集HOG特征的主要思想是通过对一幅图像进行分析, 局部目标的表象和形状可以被剃度或者边缘密度方向分布很好的好的描述. 我们对图像的各个像素点采集土堆或者边缘的方向直方图, 根据直方图的信息就可以描述图片的特征. 好在OpenCv 中已经提供了计算HOG 特征的方法, 根据采集到的HOG特征向量, 供SVM分类使用. SVM简单来说就是一个分类器, 在行人检测中就可以转化为行人与非行人的两类分类问题, 在OpenCv中运用到的是基于网格法的SVM.使用采集到的正样本(行人)和负样本(非行人, 可以是汽车, 树木, 路灯等等)的HOG特征, 然后使用SVM分类器进行训练, 得到行人检测模型, 进行行人检测。
(2)系统流程图1.2 题目研究的工作基础或实验条件(1)硬件环境:windows10(2)软件环境:pycharm平台,python编程语言。
1.3 数据集描述本实验使用的数据集使用的是百度飞浆平台公开的数据集,选用的数据分为两类,一类是行人行走的照片ppm文件,另一类是环境的照片jpg文件,一共1000张。
如图1、图2所示。
图1 行人数据集图2 环境数据集1.4 特征提取过程描述HOG特征(方向梯度直方图特征)是一种在计算机视觉领域广泛用于物体检测的技术。
局部图像区域特征可以通过图像局部区域的梯度方向表达,即特征可以由梯度方向表达。
HOG特征技术将图像分为小的区域,然后采集区域中各像素点的梯度方向直方图,把这些直方图组合起来就可以构成特征的描述。
计算过程:(1)将线性颜色空间经过Gamma校正转化为非线性空间(2)计算图像梯度(3)为每个区域构建梯度方向直方图(4)把区域合并成大的区间,区间内归一化梯度直方图(5)合并HOG特征1.5 分类过程描述支持向量机SVM是从线性可分情况下的最优分类面提出的。
行人检测与跟踪技术研究近年来,随着智能交通系统的逐渐发展,行人检测和跟踪技术在其中发挥着越来越重要的作用。
这项技术的目的是对行人进行实时监测,实现智能化的路面交通管理,为驾驶员和行人提供更安全、更便捷的交通出行环境。
一、行人检测技术行人检测技术是指在视频监控系统中利用图像处理算法对行人进行准确、高效的检测。
具体而言,这项技术需要在视频流中识别行人的存在性、位置、大小等特征,并通过人体姿态估计和运动分析等方式对行人的动态行为进行分析,从而实现实时的行人监测功能。
在行人检测技术中,目前比较常用的算法包括基于Haar特征的级联分类器算法(如OpenCV中的HOG算法)和DPM (Deformable Parts Model)算法。
这些算法主要通过一些特征提取方法和机器学习算法对行人和背景进行分类,从而实现对行人的检测。
其中,基于级联分类器的算法通过在特征空间中不断筛选准确性更高的特征,逐步提高分类器的准确率;DPM算法则通过对行人的不同部位进行分析和建模,进一步提高行人检测的准确度。
二、行人跟踪技术行人跟踪技术是指在视频监控系统中对行人进行实时追踪的一项技术。
与行人检测技术不同的是,行人跟踪技术需要在行人被检测到后,对其进行实时追踪,以拟合其运动轨迹,并进行有效的遮挡处理,保证行人的连续追踪。
在行人跟踪技术中,主要采用的算法包括卡尔曼滤波(Kalman Filter)算法、粒子滤波(Particle Filter)算法、基于卷积神经网络(CNN)的多目标跟踪算法等。
其中,卡尔曼滤波算法主要基于贝叶斯理论,根据物体位置、速度以及加速度等参数进行预测,在物体目标跟踪上应用广泛;粒子滤波算法利用大量的随机样本对目标运动轨迹进行建模,并通过计算其可信度来实现有效的目标跟踪;基于CNN的多目标跟踪算法则利用深度卷积神经网络对物体位置进行追踪,准确度和鲁棒性都有很大提升。
三、行人检测与跟踪技术在实际应用中的问题虽然行人检测和跟踪技术已经得到了广泛的实际应用,但在实际环境中,这项技术还存在着一些问题:1. 遮挡问题:在行人跟踪过程中,经常会出现部分或整体被其他物体遮挡的情况,这会导致跟踪失败。
《基于OpenCV的人脸识别系统设计》篇一一、引言随着科技的快速发展,人脸识别技术已经成为现代计算机视觉领域的一个重要研究方向。
人脸识别系统能够自动识别和验证人的身份,广泛应用于安全监控、门禁系统、支付验证等众多领域。
本文将详细介绍基于OpenCV的人脸识别系统的设计。
二、系统需求分析1. 功能需求:人脸检测、人脸特征提取、人脸识别比对等。
2. 性能需求:高识别率、实时响应、系统稳定。
3. 环境需求:操作系统兼容性强,设备要求合理。
三、系统设计概述基于OpenCV的人脸识别系统主要包括预处理、特征提取和匹配三个部分。
通过图像处理和机器学习技术,实现人脸检测和识别的功能。
四、系统架构设计1. 数据预处理模块:主要完成图像的输入、格式转换、尺寸调整等操作,以满足后续处理的需球。
同时对图像进行去噪和锐化处理,提高识别的准确性。
2. 人脸检测模块:利用OpenCV中的人脸检测算法(如Haar 级联分类器或深度学习模型)进行人脸检测,确定图像中的人脸位置。
3. 特征提取模块:通过OpenCV的深度学习模型(如OpenCV DNN模块中的卷积神经网络)提取人脸特征,如面部关键点信息等。
4. 人脸比对模块:将提取的特征与数据库中已有人脸特征进行比对,找出相似度最高的匹配结果。
根据设定的阈值,判断是否为同一人。
五、关键技术实现1. 人脸检测算法:采用OpenCV中的人脸检测算法,如Haar 级联分类器或深度学习模型,实现对图像中人脸的快速定位。
2. 特征提取算法:利用OpenCV的深度学习模型(如OpenCV DNN模块中的卷积神经网络)进行特征提取,包括面部关键点信息等。
3. 人脸比对算法:采用相似度算法(如欧氏距离、余弦相似度等)进行人脸比对,找出相似度最高的匹配结果。
六、系统实现与测试1. 系统实现:根据设计架构,逐步实现各模块功能。
采用C++编程语言,利用OpenCV库进行开发。
2. 系统测试:对系统进行严格的测试,包括功能性测试、性能测试和稳定性测试等。
《基于视觉的行人检测和跟踪技术的研究》篇一基于视觉的行人检测与跟踪技术研究一、引言在智能交通系统、安防监控和机器人视觉等多个领域,行人检测与跟踪技术是极其关键的一环。
该技术对于保护行人的安全、提升自动驾驶汽车驾驶效率和加强场景安全监管具有重要意义。
基于视觉的行人检测与跟踪技术通过对摄像头采集到的图像和视频进行分析与处理,达到检测并识别行人位置与动作的目标,是当前人工智能和计算机视觉研究的热点之一。
二、行人检测技术研究1. 技术原理行人检测是计算机视觉中的一项关键技术,它通过对图像中可能存在的行人区域进行提取与识别,进而完成行人的检测任务。
目前的行人检测方法主要包括基于特征的检测方法和基于深度学习的检测方法。
基于特征的检测方法主要通过提取行人的轮廓、形状、纹理等特征,再通过统计学习和模式识别等技术实现行人检测。
而基于深度学习的方法则是利用卷积神经网络(CNN)进行图像的特征提取和识别,以完成行人的检测。
2. 技术挑战与解决方案尽管行人检测技术已经取得了显著的进步,但仍然存在许多挑战。
例如,在复杂的环境中,如光照变化、阴影遮挡、不同视角和姿态变化等情况下,如何准确有效地进行行人检测仍是一个难题。
针对这些问题,研究者们提出了多种解决方案,如使用多尺度特征融合、深度学习模型优化等手段来提高行人检测的准确性和鲁棒性。
三、行人跟踪技术研究1. 技术原理行人跟踪技术主要是通过利用图像序列中的时空信息,对目标行人进行连续的定位和追踪。
该技术通常采用基于滤波器的方法、基于模板匹配的方法或基于深度学习的方法等。
其中,基于深度学习的方法由于其强大的特征提取和学习能力,近年来得到了广泛的应用。
2. 技术应用与挑战行人跟踪技术在智能交通、安防监控等领域有着广泛的应用。
然而,在实际应用中仍存在许多挑战,如遮挡问题、目标行人的快速移动以及光照变化等。
为了解决这些问题,研究者们正在尝试使用更先进的算法和模型结构,如使用多模态信息融合、多目标跟踪算法等来提高行人跟踪的准确性和稳定性。
《基于OPENCV的运动目标检测与跟踪技术研究》篇一一、引言随着计算机视觉技术的飞速发展,运动目标检测与跟踪技术已经成为计算机视觉领域研究的热点。
该技术广泛应用于智能监控、交通流量管理、人机交互等众多领域。
OpenCV作为一个强大的计算机视觉库,为运动目标检测与跟踪提供了有效的工具。
本文旨在研究基于OpenCV的运动目标检测与跟踪技术,探讨其原理、方法及实际应用。
二、运动目标检测技术研究1. 背景及原理运动目标检测是计算机视觉中的一项基本任务,其目的是从视频序列中提取出运动的目标。
OpenCV提供了多种运动目标检测方法,如背景减除法、光流法、帧间差分法等。
其中,背景减除法是一种常用的方法,其原理是将当前帧与背景模型进行比较,从而检测出运动目标。
2. 关键技术与方法(1)背景建模:背景建模是运动目标检测的关键步骤。
OpenCV提供了多种背景建模方法,如单高斯模型、混合高斯模型等。
其中,混合高斯模型能够更好地适应背景的动态变化。
(2)阈值设定:设定合适的阈值是运动目标检测的重要环节。
阈值过低可能导致误检,阈值过高则可能导致漏检。
OpenCV通过统计像素值分布,自动设定阈值,从而提高检测的准确性。
3. 实验与分析本文通过实验对比了不同背景建模方法和阈值设定对运动目标检测效果的影响。
实验结果表明,混合高斯模型结合合适的阈值设定能够获得较好的检测效果。
此外,本文还对不同场景下的运动目标检测进行了实验,验证了该方法的稳定性和泛化能力。
三、运动目标跟踪技术研究1. 背景及原理运动目标跟踪是指在视频序列中,对检测到的运动目标进行持续跟踪。
OpenCV提供了多种跟踪方法,如光流法、Meanshift 算法、KCF算法等。
这些方法各有优缺点,适用于不同的场景和需求。
2. 关键技术与方法(1)特征提取:特征提取是运动目标跟踪的关键步骤。
OpenCV可以通过提取目标的颜色、形状、纹理等特征,实现稳定的目标跟踪。
此外,还可以采用深度学习等方法,提取更高级的特征,提高跟踪的准确性。
视频监控系统中的行人检测与追踪技术研究随着科技的不断进步与发展,视频监控系统在监控安全领域扮演着越来越重要的角色。
其中,行人检测与追踪技术是视频监控系统中的关键技术之一,它能够帮助监控系统识别并追踪目标人物。
本文将针对视频监控系统中的行人检测与追踪技术展开研究。
一、行人检测技术行人检测技术是视频监控系统中的基础技术,它能够实现对行人目标的准确识别。
行人检测技术的研究主要包括两个方面:特征提取和行人目标分类。
特征提取是行人检测技术的核心,它通过提取图像中的特定特征来区分行人目标与背景。
目前,常用的特征提取方法主要包括Haar特征、HOG(Histogram of Oriented Gradients)特征和CNN (Convolutional Neural Networks)特征等。
这些方法通过对图像中的灰度、方向梯度等信息进行提取,能够有效地区分行人目标与其他物体。
行人目标分类是基于特征提取的基础上,对行人目标进行分类和识别。
现有的行人目标分类方法主要包括传统机器学习算法和深度学习算法。
传统机器学习算法如SVM(Support Vector Machine)、Adaboost等能够根据提取的特征进行分类,但其性能受制于特征的准确性。
而深度学习算法如卷积神经网络(CNN)通过多层神经网络的组合学习,能够实现更准确的行人目标分类和识别。
二、行人追踪技术行人追踪技术基于行人检测的结果,能够实现对行人目标在连续帧图像中的追踪。
行人追踪技术的研究主要包括目标跟踪和轨迹预测两个方面。
目标跟踪是指在视频监控系统中,实时追踪行人目标并不断更新其位置信息。
目前常用的目标跟踪方法有基于特征点的跟踪方法和基于外观模型的跟踪方法。
基于特征点的跟踪方法主要利用行人目标在连续帧之间的特征点进行匹配,通过跟踪这些特征点来实现行人目标的追踪。
而基于外观模型的跟踪方法则主要通过学习行人目标的外观模型,根据目标和背景之间的相似性来进行跟踪。
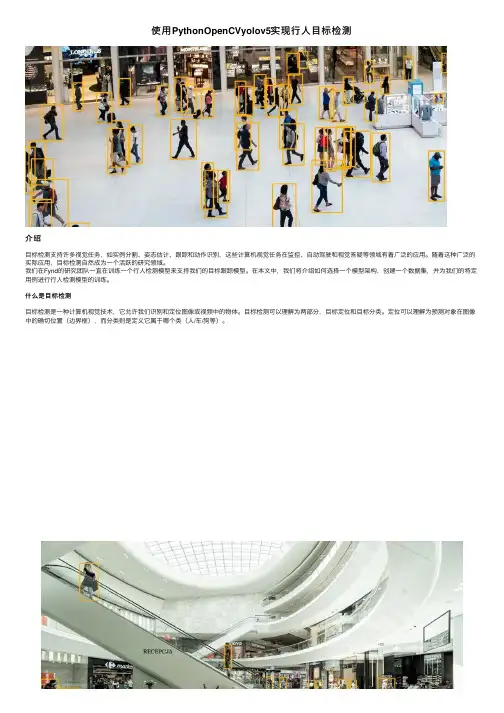
使⽤PythonOpenCVyolov5实现⾏⼈⽬标检测介绍⽬标检测⽀持许多视觉任务,如实例分割、姿态估计、跟踪和动作识别,这些计算机视觉任务在监控、⾃动驾驶和视觉答疑等领域有着⼴泛的应⽤。
随着这种⼴泛的实际应⽤,⽬标检测⾃然成为⼀个活跃的研究领域。
我们在Fynd的研究团队⼀直在训练⼀个⾏⼈检测模型来⽀持我们的⽬标跟踪模型。
在本⽂中,我们将介绍如何选择⼀个模型架构,创建⼀个数据集,并为我们的特定⽤例进⾏⾏⼈检测模型的训练。
什么是⽬标检测⽬标检测是⼀种计算机视觉技术,它允许我们识别和定位图像或视频中的物体。
⽬标检测可以理解为两部分,⽬标定位和⽬标分类。
定位可以理解为预测对象在图像中的确切位置(边界框),⽽分类则是定义它属于哪个类(⼈/车/狗等)。
我们选择YOLOv5是因为它的单级特性(快速推理)和在COCO mAP val上的良好性能,它还有YOLOv5m和YOLOv5s等更快的版本。
YOLOv5YOLO系列属于单阶段⽬标探测器,与RCNN不同,它没有单独的区域建议⽹络(RPN),并且依赖于不同尺度的锚框。
架构可分为三个部分:⾻架、颈部和头部。
利⽤CSP(Cross-Stage Partial Networks)作为主⼲,从输⼊图像中提取特征。
PANet被⽤作收集特征⾦字塔的主⼲,头部是最终的检测层,它使⽤特征上的锚框来检测对象。
YOLO架构使⽤的激活函数是Google Brains在2017年提出的Swish的变体,它看起来与ReLU⾮常相同,但与ReLU不同,它在x=0附近是平滑的。
损失函数是具有Logits损失的⼆元交叉熵性能0.48 mAP@0.50 IOU(在我们的测试集上)分析这个现成的模型不能很好地执⾏,因为模型是在COCO数据集上训练的,⽽COCO数据集包含⼀些不必要的类,包含⼈体实例的图像数量较少,⼈群密度也较⼩。
此外,包含⼈体实例的图像分布与闭路电视视频帧中的图像分布有很⼤不同。
视频监控系统中的行人检测与轨迹分析研究近年来,随着城市发展的加速和安全意识的增强,视频监控系统在公共场所的应用越来越广泛。
视频监控系统不仅可以提高公共安全性,还可以帮助管理者更好地了解人流情况,从而优化城市规划和资源配置。
而视频监控系统中的行人检测与轨迹分析作为其中重要的一环,对于监控区域的安全性和管理效率具有重要的意义。
首先,视频监控系统中的行人检测是一个基础性的任务。
行人检测可以通过计算机视觉和深度学习的方法来实现。
通过对监控视频中的图像进行准确的行人检测,系统可以及时发现异常行为,如潜在的犯罪嫌疑人或者人群聚集等。
行人检测的准确度和实时性对于提高监控系统的效果至关重要。
因此,需要在算法设计和硬件优化方面进行持续的研究和改进。
其次,行人检测的结果可以进一步用于轨迹分析。
轨迹分析可以对行人在监控区域中的行动进行跟踪和记录,从而为管理者提供更详细的信息。
通过对行人的轨迹进行分析,可以了解人流的路径和密度,进而辅助城市规划和公共安全的决策。
轨迹分析可以通过计算机视觉和图像处理的技术,结合人工智能的方法,对行人的运动进行建模和预测,从而更好地了解行人的行为模式和规律。
此外,行人检测与轨迹分析在视频监控系统中还具有其他一些重要的应用。
例如,它可以检测行人的运动方向和速度,从而实现交通流量的监测和管控。
这对于繁忙的城市路口和交通枢纽来说,可以提供有价值的数据支持,帮助交通管理部门进行交通流量优化和拥堵疏导。
此外,行人检测和轨迹分析还可以用于人员聚集的监测和预警,如重要场所的安全控制和人流疏散等。
通过对行人的聚集行为进行分析,可以更好地预测人员密度和人员聚集的可能性,从而更有效地保障公共安全。
为了实现视频监控系统中的行人检测与轨迹分析研究,需要进行算法和技术的不断创新。
首先,算法方面,需要设计高效准确的行人检测和跟踪算法,可以考虑将深度学习技术与传统图像处理技术结合,提高算法在复杂场景下的鲁棒性和性能。
同时,还需要研究行人轨迹分析的算法,如运动模式识别和行为预测等,以提供更全面的人流信息。
基于机器学习的行人检测与识别技术研究随着社会的发展和科技的进步,人工智能技术逐渐得到广泛的应用,其中机器学习作为人工智能的一种技术手段,成为了热门话题。
机器学习的目的是通过对数据进行分析和学习,提高系统的准确性和效率。
其中,基于机器学习的行人检测与识别技术也成为了研究热点。
本文将基于机器学习的行人检测与识别技术进行探讨和分析。
一、基于机器学习的行人检测技术在机器学习中,行人检测技术是一个非常重要的区域。
所谓行人检测,就是通过机器视觉技术对摄像头所捕捉到的图像进行处理和分析,以便快速地判断图像中是否存在行人,进而在一系列应用场景中进行进一步的处理。
其中,机器学习算法中的分类器,在行人检测中扮演了重要的角色,具体来说,可以用以下几种方式进行训练:1. Haar分类器Haar分类器是一种基于特征的分类器,可以根据不同的特征,并通过逐步比较不同的特征值,来按照不同的类型分类。
其分类器中的各种特征,包括了眼睛、嘴巴、鼻子等。
行人检测中使用的Haar分类器,可以有效地识别和分类行人的形象特征,并进行相关的处理和判断。
2. 随机森林分类器随机森林分类器是一种有效的分类器,可以通过随机产生多个属性集合,进行分类和判断。
其主要特点是可以避免样本过度拟合的问题,同时可以提高分类器的准确性和稳定性。
在行人检测中,随机森林分类器可以有效地避免过度拟合的问题,提高分类器的鲁棒性和准确性。
3. 卷积神经网络卷积神经网络是近年来快速发展的一种神经网络结构,其可以通过对输入的图像进行特征提取和深度学习,来进行行人检测的分类和判断。
通过卷积神经网络的处理和学习,可以提高行人检测的准确性和效率,同时也可以适应各种不同的应用场景。
二、基于机器学习的行人识别技术在行人检测的基础之上,行人识别是对特定行人进行识别和记录的过程。
例如,在视频监控、人脸识别等应用场景中,行人识别是非常重要的环节。
基于机器学习的行人识别技术,主要应用于以下几种环节:1. 特征提取特征提取是行人识别的基础,可以通过图像分析和学习,提取出不同行人的特征信息。
《基于视觉的行人检测和跟踪技术的研究》篇一基于视觉的行人检测与跟踪技术的研究一、引言随着计算机视觉技术的飞速发展,基于视觉的行人检测与跟踪技术在智能交通、安防监控、机器人导航等领域得到了广泛应用。
本文旨在探讨基于视觉的行人检测与跟踪技术的原理、方法及其应用,以期为相关领域的研究与应用提供参考。
二、行人检测技术行人检测是计算机视觉领域的一个重要研究方向,其主要目的是在图像或视频中准确地检测出行人的位置。
目前,基于视觉的行人检测技术主要分为基于特征的方法和基于深度学习的方法。
1. 基于特征的方法基于特征的方法主要通过提取图像中的颜色、纹理、形状等特征来检测行人。
其中,Histogram of Oriented Gradients (HOG)是一种常用的特征描述符,可以有效地描述行人的形状和轮廓。
此外,还有Haar特征、SIFT特征等方法,通过训练分类器对图像进行分类,从而检测出行人。
2. 基于深度学习的方法随着深度学习技术的发展,基于深度学习的行人检测方法逐渐成为主流。
卷积神经网络(CNN)在特征提取方面具有强大的能力,可以自动学习到更具有代表性的特征。
此外,还有一些专门为行人检测设计的网络结构,如R-CNN系列、YOLO系列和SSD等。
三、行人跟踪技术行人跟踪是指在视频序列中,对检测到的行人进行持续跟踪,以获取其运动轨迹和动态行为。
目前,常用的行人跟踪方法包括基于滤波的方法和基于深度学习的方法。
1. 基于滤波的方法基于滤波的方法主要通过卡尔曼滤波、光流法等算法对行人的位置进行预测和跟踪。
其中,卡尔曼滤波通过不断迭代更新行人的位置信息,实现行人的稳定跟踪。
光流法则通过计算图像中像素的运动信息,实现对行人的跟踪。
2. 基于深度学习的方法基于深度学习的行人跟踪方法主要利用神经网络对行人的外观特征进行学习和建模,从而实现更准确的跟踪。
其中,Siamese 网络、孪生网络等是常用的跟踪算法。
这些算法通过学习行人的外观特征和运动信息,实现对行人的精确跟踪。
视频监控系统中的行人检测与追踪算法设计与实现视频监控系统是现代安防领域中重要的技术应用之一。
其中,行人检测与追踪算法是视频监控系统中的一个关键问题,它能够实现对行人的实时检测与追踪,为安防工作提供便利。
本文将对视频监控系统中的行人检测与追踪算法进行设计与实现的相关内容进行讨论。
一、行人检测算法设计与实现行人检测算法是视频监控系统中的基础模块之一,它能够通过分析视频图像中的像素信息,判断出图像中的行人目标。
传统的行人检测算法主要采用了基于图像特征的方法,如Haar特征、HOG特征和LBP 特征等。
Haar特征是运用了多尺度窗口技术的一种特征描述方法。
它通过将图像窗口分为多个区域,并计算出每个区域内像素值的差异,从而得到一个代表该窗口的积分图。
通过比较不同窗口间的积分图差异,就能够实现对行人目标的判定。
HOG特征是直方图梯度描述符的一种变种,它通过计算图像局部区域内的梯度直方图,来表示该区域的图像特征。
在行人检测算法中,HOG特征能够有效地描述行人的形状和轮廓信息,从而实现对行人目标的检测。
LBP特征是局部二值模式的一种特征描述方法,它通过计算图像局部区域的灰度值与周围像素灰度值的差异,来表示该区域的纹理信息。
在行人检测算法中,LBP特征能够有效地描述行人的纹理信息,从而实现对行人目标的检测。
不论是Haar特征、HOG特征还是LBP特征,它们都通过构建分类器来实现对行人目标的检测。
常用的分类器包括AdaBoost算法和支持向量机(SVM)等。
这些算法在行人检测领域中都有着良好的效果,并且能够满足实时性的要求。
二、行人追踪算法设计与实现行人追踪算法是视频监控系统中的进一步应用,它能够实现对行人目标的跟踪,从而实现对行人运动轨迹的可视化和分析。
常见的行人追踪算法有卡尔曼滤波算法、粒子滤波算法和多目标跟踪算法等。
卡尔曼滤波算法是一种递归滤波算法,它通过状态预测和观测更新两个步骤,来估计行人目标的位置和速度信息。
基于行人检测与跟踪的视频监控系统设计与研究视频监控系统是目前广泛应用于公共安全、交通管控等领域的重要技术工具。
其中,行人检测与跟踪是视频监控系统中的一个关键技术,可以用于实时监测和识别出图像中的行人,并跟踪其运动轨迹。
本文将详细讨论基于行人检测与跟踪的视频监控系统的设计与研究。
一、引言随着城市化进程的加快以及人口的不断增长,对公共安全和治安的需求也进一步提高。
视频监控系统作为一种高效的手段,被广泛应用于各种场所和环境中。
而行人检测与跟踪技术在视频监控系统中起着至关重要的作用,可以有效地辅助人员对图像中的行人进行实时监测和跟踪,提供精准的安全保障。
二、行人检测技术1. 特征提取方法行人检测的第一步是通过提取图像的特征来识别行人。
常用的特征提取方法有Haar特征、HOG(Histograms of Oriented Gradients)特征以及深度学习方法等。
Haar特征通过计算图像中不同区域的像素差异来进行特征提取,该方法计算简单且执行速度相对较快。
HOG特征则通过计算图像中梯度的方向直方图来表征图像特征。
深度学习方法通过在大规模图像数据集上进行训练,可以从图像中自动学习出特征表达。
2. 分类器设计与训练在特征提取后,需要设计并训练分类器来对图像中的行人进行分类。
常用的分类器有SVM(Support Vector Machine)、AdaBoost(Adaptive Boosting)以及深度学习方法等。
SVM是一种二分类模型,可以通过将行人特征与非行人特征进行分类训练来实现行人检测。
AdaBoost是一种整合多个弱分类器的方法,通过以一定的权重组合这些弱分类器,进而得到一个强分类器进行行人检测。
深度学习方法则通过构建深度神经网络来进行行人分类,可以实现更加准确的行人检测结果。
三、行人跟踪技术1. 目标跟踪方法在行人检测完成后,需要利用跟踪算法对行人进行跟踪,以获取行人的运动轨迹。
常用的目标跟踪方法有卡尔曼滤波器、粒子滤波器以及深度学习方法等。
基于深度学习方法的视频行人检测系统的研究与实现摘要:本文提出了一种基于深度学习方法的视频行人检测系统,在该系统中,采用了最新的深度学习算法,并结合了一些经典的计算机视觉技术,实现了对于视频流中行人的实时检测和跟踪。
在实验中,采用了多个数据集,分别是Caltech Pedestrian Dataset、CityPersons Dataset和CUHK-SYSU Pedestrian Detection Benchmark,实验结果表明,该系统在检测准确率和检测速度方面都达到了前沿水平,同时还具有良好的鲁棒性和实用性。
本文的研究成果对于提高视频监控领域的行人检测效果具有重要意义。
关键词:深度学习、视频行人检测、实时跟踪、计算机视觉、检测准确率、检测速度1.引言随着计算机视觉技术的不断发展,视频监控技术正逐渐成为人们日常生活中不可或缺的一部分。
而视频行人检测系统作为其中的重要组成部分,具有着极大的应用前景。
因此,如何提高视频行人检测系统的性能和实用性成为一个重要的研究方向。
2.深度学习深度学习是目前计算机视觉领域中最为热门的研究方向之一。
它通过构建和训练深度神经网络,实现了对于海量数据的有效学习和处理,且在许多任务上都取得了突出的成果。
在视频行人检测领域中,利用深度学习算法可以有效地提高检测准确率和检测速度。
3.视频行人检测系统的设计与实现本文提出的视频行人检测系统主要分为两个部分:行人检测与跟踪。
在行人检测部分,采用了目前最为先进的深度学习算法——YOLOv3作为检测模型,并根据数据集的特点进行了一些优化和改进,使得检测效果更加优秀。
在行人跟踪部分,采用了SORT算法,实现了对于视频流中行人的实时跟踪和识别。
实验结果表明,本系统在各项指标上具有优秀的表现。
4.实验与结果分析本文采用了三个数据集,分别是Caltech Pedestrian Dataset、CityPersons Dataset和CUHK-SYSU Pedestrian Detection Benchmark,在这些数据集上进行了实验。
安防监控视频中的行人检测与自动跟踪随着科技的不断发展,安防监控系统在各个领域得到广泛应用,为了提高监控系统的效能,行人检测与自动跟踪成为了安防监控系统中的重要功能之一。
本文将详细介绍安防监控视频中的行人检测与自动跟踪技术以及其在实际应用中的优势与挑战。
一、行人检测技术的原理与方法行人检测技术是指通过计算机视觉技术,识别和检测监控视频中的行人目标。
行人检测的主要目标是从视频中准确地识别出行人,并将其与其他背景进行区分。
现如今,行人检测主要基于深度学习技术,如卷积神经网络(Convolutional Neural Network,CNN)或其变种网络,如Faster R-CNN、YOLO以及SSD等。
这些深度学习算法可以通过大量的训练数据学习到行人的特征,并能在实时视频中准确地检测出行人。
行人检测技术的方法主要分为两类:基于深度学习的方法和传统的图像处理方法。
基于深度学习的方法在检测准确度和处理速度上表现出色,但对计算资源的要求较高。
而传统的图像处理方法则主要基于特征提取和目标分类等传统计算机视觉技术,其优势在于对计算资源的要求相对较低,但在复杂场景下的检测精度可能较低。
二、行人自动跟踪技术的原理与方法行人自动跟踪技术是基于行人检测的基础上,通过实时更新目标位置信息,实现对行人目标的跟踪。
自动跟踪技术主要包括目标匹配和目标预测两个关键步骤。
目标匹配是指通过目标检测得到的目标位置信息,与前一帧或多帧中的目标位置进行比较,以确定目标的运动轨迹。
常用的目标匹配方法有卡尔曼滤波器、卡尔曼粒子滤波器和相关滤波器等。
这些方法能够根据历史位置信息和运动模型对目标位置进行预测,从而实现对行人的跟踪。
目标预测是指在目标匹配的基础上,通过分析目标的运动轨迹和行为特征,对未来目标位置进行预测。
目标预测常常利用机器学习算法,如支持向量机、决策树等,来建立目标运动的模型,进而对未来运动进行预测。
三、行人检测与自动跟踪的应用优势行人检测与自动跟踪在安防监控系统中具有诸多应用优势,包括以下几个方面:1. 实时性:行人检测与自动跟踪技术能够在实时视频流中准确地检测和跟踪行人,可以及时发现异常行为和危险情况。
过程中对动态场景中的感兴趣目标进行检测、分类、跟踪、识别和分析,实现犯罪预防、交通管理、意外防范和医疗监护等功能,成为当前智能视频监控技术重要研究和关注点[2]。
国内外的学术研究机构和安防产业针对行人检测技术的研究和应用做过大量工作,其检测核心问题是如何在复杂环境中提取行人特征与分类定位,目前行人检测特征中使用最为广泛的行人特征描述子为HOG(Histogram Oriented of Gradient)梯度方向直方图[3]。
本论文研究了通过HOG 特征提取和SVM分类器在视频监控系统中利用计算机视觉的OpenCV建立行人检测模型,实现运动目标检测、识别和分析的智能监控系统方案。
1 视频监控系统行人检测总体结构行人检测监控系统包括监控系统网络硬件部分和行人检测监控软件两个部分。
系统硬件部分包括:(1)前端高清摄像头,主要安装在出入口、大楼门厅、通道、电梯、停车场、外围等人员出入频繁的公共区域;(2)网络部分,通过网络和交换机级联接入至监控中心,如果距离较远还可以利用光纤和光纤收发设备;(3)监控中心,包括机房交换机、电视墙、存储服务器;(4)视频显示,摄像头集中显示供人随时查看,还可以通过服务器远程监控或手机监控。
监控系统网络拓扑结构如图1所示。
行人检测监控软件部分利用Visual Studio 2017和OpenCV视觉库开发环境实现检测功能,其整体设计如图2所示。
首先通过网络高清摄像头实时采集监控视频图像,不断截取视频帧图像并分析和提取每一帧图像中的行人的HOG特征,利用已经训练好的SVM(基于支持向量机)分类模型对图像中提取的HOG特征进行判断,实现运动目标的实时检测与识别。
图2 行人检测软件系统整体结构框图2 HOG特征提取与SVM分类器方向梯度直方图(HOG)特征是当前广泛使用的行人检测特征描述子,在计算机视觉和图像处理中通过计算和统计图像局部区域的梯度方向直方图可有效地将运动人体和图1 监控系统网络拓扑结构图58 | 电子制作 2018年5月软件开发复杂背景区分出来,并且HOG特征在几何和光学变化环境都能保持很好的不变性。
HOG算法具体实现过程:(1)获取视频监控的帧图像进行标准化处理,使用所有图片具有相同的标准、颜色和灰度,有助于实现对行人有效特征提取,因为图像的颜色信息对目标检测影响较小,为减少特征提取的复杂度可先对检测图像进行灰度化处理;(2)使用伽马(Gamma)变换对图像进行归一化处理,调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时还可以抑制噪音干扰;(3)计算图像横坐标和纵坐标方向的梯度,图像局部特征不连续(如颜色、纹理等特征的突变)的边缘位置灰度值的梯度较大,据此计算每个像素的梯度方向值可用来捕获轮廓、人影和纹理信息并进一步弱化光照的影响;(4)将图像划分成一个cell单元,将cell单元内的每一个点的梯度角度将其离散化为9个bin来计算梯度方向,再对cell内每个像素用梯度方向在直方图中进行加权投影便能够计算出cell的梯度直方图,由于局部光照和前景背景对比的影响使得视频图像的梯度绝对值变化范围很大,需要对图像梯度进行归一化处理,即可形成每个cell 的描述子;(5)将每几个cell(例如3×3个cell)组成一个block,一个block内所有cell的特征描述子串联起来便得到该block的HOG特征描述子;(6)采用滑动窗口获取图像内的所有block的HOG特征描述子,串联起来就可以得到检测目标的HOG特征描述子[4-5]。
HOG特征提取后需要通过合适的机器学习算法从大量的训练样本数据中获得相应的分类器,只有配上合适的训练器才能够达到真正的机器学习统计分类的目标。
行人检测算法处理过程为将待检测的目标图像中获得的HOG特征作为分类器的输入,分类器给出行人判断的一个概率值,通过设定概率阈值来判断检测目标是否为行人。
目前比较常用的分类算法有基于神经网络(Neural Network, NN)的方法、基于Adaboost的方法以及基于支持向量机(SVM)的方法等。
SVM方法能够通过非线性映射将原来的样本空间映射到高维以至于无穷维的特征空间,若在原始空间是非线性不可分的,通过SVM非线性映射可以使之变成高维空间线性可分,同时SVM方法利用对于核函数的展开定理能够很容易解决提高维度情况下带来的计算复杂度高的难题,计算复杂度不会增加,某种程序上也可以避免“维数灾难”。
一般提取窗口的HOG特征都有比较高的维数,常用的检测窗口大小是64×128,从中提取的HOG特征维数高达3780维,而SVM在处理高维图像数据时有很大优势,因此图像识别中的行人检测广泛应用HOG特征结合SVM分类器。
3 Visual Studio 2017和OpenCV实现行人检测行人检测算法程序实现较为复杂,借助于功能强大的开源平台进行系统的快速实现是应用软件开发的一种常用手段,本论文中系统实现采用开源计算机视觉库OpenCV,适合监控视频系统的二次开发。
OpenCV(Open Source Computer Vision Library)是一个采用C/C++为主要编程语言的跨平台计算机视觉库,主要应用于人机交互、图像区分、人脸识别、动作识别、运动跟踪等领域。
在OpenCV 库中已包含一个预先训练好的HOG+线性SVM的检测算法,HOG提取的具体方法为训练过程中正样本统一为64×128,同时也为检测窗口的大小,在8×8的cell单元中统计每一个像素点的HOG特征,并通过投影形成9维特征向量,在cell单元所属的16×16的block单元中进行组合,每个block形成36维特征,由于每个图像包含有105个block所以最后每一幅样本图形成3780维的HOG特征。
其行人检测过程采用的是滑动窗口法,其过程为获取视频图像并对图片按照算法进行尺寸缩放,使用128×64的检测滑动窗口在每一层的图像上滑动,每个滑动窗口内计算并提取出HOG特征,再将HOG特征输入已训练好的SVM分类器中,即可检测该图层是否存在行人目标,如果该层检测到目标则存储下目标区域,如无则继续滑动,最后在图像上标识出检测到的行人目标区域[6-7]。
软件开发平台使用Visual Studio 2017社区版和OpenCV3.4.1版本。
OpenCV的核心模块中CV模块包含基本的图像处理函数和高级视觉算法。
检测程序主要使用视频采集类VideoCapture、HOG特征结构体HOGDescriptor、SVM模型设置函数setSVMDetector()以及行人检测函数detectMultiScale()。
首先使用HOGDescriptor定义HOG特征描述子并默认参数初始化该结构体,即检测窗口winSize(64,128)、块大小blockSize(16,16)、块步长blockStride(8,8)、细胞单元大小cellSize(8,8)、bin数nbins(9)。
然后利用setSVMDetector(HOGDescriptor::ge tDefaultPeopleDetector())为SVM分类器设置默认的训练模型,最后利用detectMultiScale(img, found_locations)函数采用多尺度的窗口进行检测,该函数作用为将大于64×128的图像进行分层使得每层都满足检测窗口大小,通过循环调用detect()函数实现大尺寸图像的行人检测。
检测结果通过参数found_locations返回,该参数为vector 类型的矩形结构,即可在图像中标识出行人位置,同时可以检测结果导入监控预警系统做进一步处理,本系统中将检测(下转第9页)www�ele169�com | 59电子电路设计与方案触。
特别要注意蓝牙模块的接地端与功率放大器的接地端连接,容易产生噪声干扰,不能通过插座直接连接,而是采用一条导线(R0)来连接,这样可以有效的消除干扰,最后在电路板的底板下面再安装一块相同尺寸的有机玻璃,电路板的安装就完成了,实物图如图8所示。
电路板安装完成后,在通电前一定要认真检查有无焊错的地方,特别要注意引线有无焊接短路,有无元件引脚焊反,例如二极管、电解电容。
检查完毕后准备通电调试,在交流220V输入端接上变压器,先不接入音箱,而是把数字万用表接入音频输出端,万用表置于直流2V档。
然后接通电源,此时观察万用表的读数,读数如果在30mV以内,表明该功率放大器功能基本正常,才能接入音箱。
如果电压不在这个范围内,电路可能存在问题则需马上断电检查电路。
一切准备就绪,首先操作手机打开蓝牙功能,操作搜索蓝牙设备,当出现“BH-BT3706”设备后,然后选择连接“BH-BT3706”,当听到音箱发出“嘟”的一声,表明手机与功率放大器已经正常连接,然后播放手机音乐,调节手机音量按键,音箱音量大小应该有变化,经过实际测试,该蓝牙功率放大器输出高音清晰,低音震撼,音质非常好,电路调试成功。
5 总结从设计方案到电路制作,一个小型、便携的、基于蓝牙技术的功率放大器破茧而出,经过长时间测试,蓝牙模块BH-BT3706配上发出NE5532和LM1875的组合,以其音质优美,还有成本低的优点,用它来长时间欣赏高保真音乐不会感到浮噪刺耳朵,是制作蓝牙功率放大器的理想选择。
参考文献* [1]陆鑫潮,蒋敏兰,李慧芬.基于NI无线传感器网络的智能家居监控系[J].计算机系统应用,2013.22(9):64-69.* [2]常兴,赵婷婷.音频功率放大器的设计[J].电子技术与软件工程,2016(21):132-132.* [3]葛中海,吕秋珍,陈芳.音频功率放大器[M].北京:电子工业出版社2017.到的行人利用矩形框标识出来,其检测结果如图3所示。
图3 视频监控系统行人检测结果4 结束语本论文中利用OpenCV中的HOG+SVM的行人检测算法实现的视频监控系统,基本满足在背景固定的视频监控系统中行人检测和跟踪要求。
由于行人的多变性和背景的复杂性,在检测过程中还存在着许多技术难点。
在今后的研究中需要关注两个问题:(1)准确性问题,实际应用场景中行人姿态和着装、环境背景、动态遮挡以及拍摄因素等影响着行人检测的准确性,因此可尝试在行人检测时采用多特征结合的方法以增强特征描述,分类器能够更加高效地检测人体目标;(2)实时性问题,由于动态视频中行人检测对实时性要求非常高,需要具有较高的计算精度和计算速度。
因此实现较高的准确性和较快的检测速度的实时行人检测监控系统在未来很长一段时间内还是一个非常具有挑战性的研究课题。
参考文献* [1]吴群,王田,王汉武等.现代智能视频监控研究综述[J].计算机应用研究,2016,33(6):1601-1606.* [2]黄凯奇,陈晓棠,康运锋,谭铁牛.智能视频监控技术综述[J].计算机学报,2015,38(6):1093-1118.* [3]徐渊,许晓亮,李才年,姜梅,张建国.结合SVM分类器与HOG特征提取的造价检测[J].计算机工程,2016,42(1):56-60.* [4]刘文振.基于HOG特征的行人检测系统的研究[D].南京邮电大学,2016.* [5]单仁光.智能视频监控中行人检测与跟踪技术的研究与实现[D].浙江工业大学,2015.* [6]夏红丽.中小学校视频监控中的行人检测方法研究[D].苏州大学,2014.* [7]汪成龙,陈广财,陈治明.基于Opencv的行人检测方法[J].惠州学院学报,2016,36(3):55-57.(上接第59页)图8 制作完成的实物图www�ele169�com | 9。