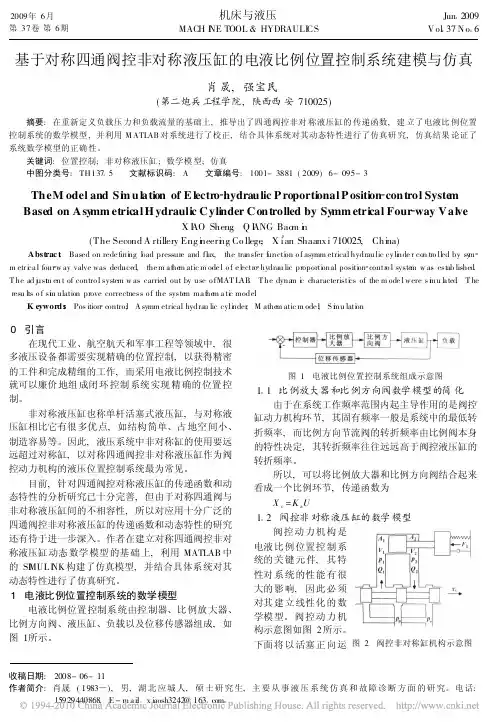
比例阀控制非对称液压缸系统的非线性建模与仿真
- 格式:pdf
- 大小:314.46 KB
- 文档页数:5
基于Simulink的比例阀控液压缸的建模与仿真张兵;邓子龙【摘要】By improving the hydraulic system of the clamp experiment table to make it a closed-loop control system, and taking the system as the research object, the mathematical model and simulink simulation model are established. The dynamic performance in time and frequency domains is analyzed. Aiming at the improvement of the dynamic performance ofthe system, the damping ratioδh , the hydraulic cylinder frequency wh ,and the open loop gain Kc , of the close-loop control ing system, and their effect on the dy-namic performance of the system are analyzed by using MATLAB so as to provide reference for the design, calibration and optimiza-tion of the hydraulic system.%通过对夹具实验台液压系统进行改进,使其成为闭环控制系统并以此系统为研究对象,建立数学模型和Simulink仿真模型,分析了系统在时域和频域的动态性能。
从提高系统动态特性的角度出发,应用MATLAB分析了液压缸频率wh、阻尼比δh 和闭环控制系统开环增益Kc 对系统动态性能的影响,从而为液压系统的设计、校正、优化提供借鉴。
液压缸动力学特性的建模与仿真液压缸是一种常见的执行元件,广泛应用于各类工业设备中。
在工程设计和优化过程中,了解液压缸的动力学特性对于提高其性能和可靠性至关重要。
本文将探讨液压缸动力学特性的建模与仿真方法。
液压缸的动力学特性是指其在工作过程中受到的力和力矩对速度、加速度和位移的影响。
建立液压缸的动力学模型可以帮助工程师更好地理解其运动规律,并据此进行优化设计。
基于这样的考虑,建模和仿真成为了研究液压缸动力学特性的重要手段。
在液压缸的建模过程中,最常用的方法是基于物理原理的方法。
这种方法通过对液压缸内部液体流动、活塞运动和密封摩擦等因素的分析,建立数学方程描述液压缸的动力学行为。
其中,液体流动方程、动量守恒方程和力矩平衡方程是建立液压缸动力学模型的重要基础。
此外,还需要考虑活塞与缸体之间的摩擦力和液压系统的非理想性等因素。
建立液压缸动力学模型的另一个重要问题是选择适当的仿真工具。
目前,常用的仿真软件有MATLAB/Simulink、LabVIEW和AMESim等。
这些软件具有强大的仿真功能和友好的用户界面,可以同时模拟液压系统和液压缸的动力学行为。
通过这些仿真工具,工程师可以直观地观察液压缸的运动轨迹、力矩曲线和速度变化等,从而优化设计方案。
除了基于物理原理的建模方法,还有基于系统辨识的方法可以用于液压缸的动力学建模。
系统辨识是一种通过实验数据来估计系统的数学模型的方法。
在液压缸建模中,可以通过对其施加不同的输入信号,并记录输出信号的变化来进行系统辨识。
常用的系统辨识方法有ARX模型、ARMAX模型和State Space模型等。
通过系统辨识可以获得更加准确的液压缸动力学模型,进而进行仿真和优化设计。
液压缸动力学特性的仿真研究不仅有助于优化设计,还可以用于故障诊断和故障预测。
通过对液压缸的模拟仿真,可以分析其在不同工况下的性能变化,并预测潜在故障的出现。
这对于维护人员来说是非常有价值的,可以提前采取相应的维护措施,避免设备故障对生产过程造成影响。
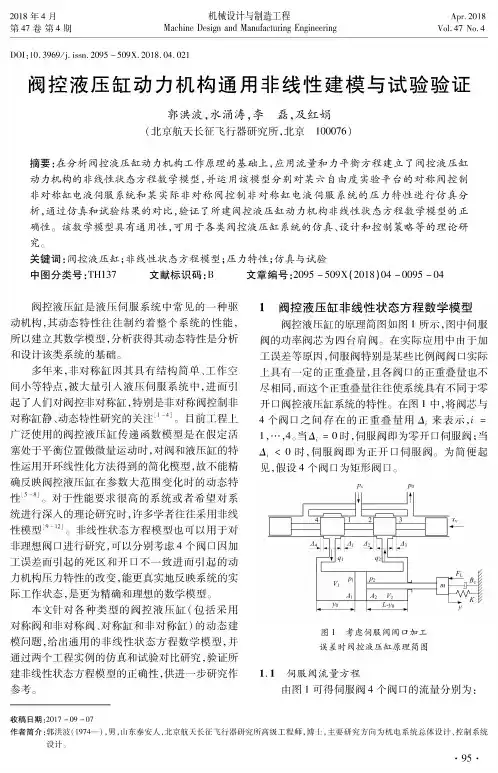
2018年4月第47 第4期机械设计与 工程Machine Design and Manufacturing EngineeringApr.2018Vol.47 No.4DOI:10. 3969/j.issn.2095 - 509X.2018.04. 021阀控液压缸动力机构通用非线性建模与试验验证郭洪波,水涌涛,李磊,及红娟(北京航天 飞行器研究所,北京100076 $摘要:在分析阀控液压缸动力机构工作原理的基础上,应用流量和力平衡方程建立了阀控液压缸 动 构的非线性状态方程数学模型,并运用该模型分别对某六自由度实验平台的对称阀控制非对称缸电液伺服系统和某实际非对称阀控制非对称缸电液伺服系统的压力特性进行仿真分析,通过仿真和试验结果的对比,验证了所建阀控液压缸动力机构非线性状态方程数学模型的正 确性。
该数学模型具有通用性,可用于各类阀控液压缸系统的仿真、设计和控制策略等的理论研 究。
关键词:阀控液压缸;非线性状态方程模型;压力特性;仿真与试验中图分类号:T H137 文献标识码:B 文章编号:2095 -509X(2018)04 -0095 -04是 伺服系统中常见的一种驱动机构,其动 性 约着整个系统的性能,所以建立其数学模型,获其动性是和设 统的 &,对 因其具 构 、工作空 间 点,被大量引入伺服系统中,进而引 对 对 ,是对对 、动 性研究的 [1_4]。
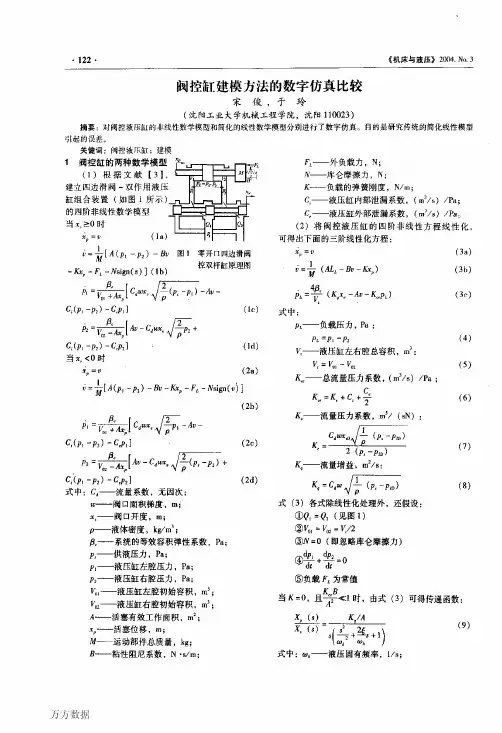
前工程上广泛使用的 模型是在假定活位置做微量运动时,对和的特性运用开环线性化 的简化模型,故不能精确反映 在参数大化时的动 :性[5_8]。
对性能要求很高的系统或者对系 统进行深入的理论研究时,学者 用非线性模型[9-12]。
性 程模型也可以用于对理想阀口进行研究,可以 考虑4个口因加工误差而引起的死区和开口不一致进而引起的动力机构压力特性的 ,能更真实地反映系统的实际工 ,是 确和理想的数学模型。
本 对各种类型的(包括采用对 和非对 、对 和非对称缸)的动态建模 ,给出通用的 性 程数学模型,并 通过两个工程实例的仿真和试验对比研究,验所建 性 程模型的正确性,供进一步研究作 参考。
煤矿机械Coal Mine MachineryVol.32No.10Oct.2011第32卷第10期2011年10月引言随着水下机器人技术的不断发展,水下机器人的作业范围和作业水深不断增加。
在恶劣的海洋环境下,要完成复杂的水下作业任务,水下机器人上搭载的机械手的作用显得尤为重要。
没有机械手,水下机器人充其量只是一个观察探测台架。
目前,水下机械手多为液压驱动关节式,主要包括线性关节和转动关节,线性关节主要依靠直线液压缸的伸缩实现有限范围内的摆动,转动关节则依靠液压马达实现有限范围的转动或连续回转,每个关节都可以通过液压伺服系统精确控制,实现机械手自身的作业动作。
阀控非对称缸是水下液压机械手的重要驱动环节,由于其结构的不对称及非线性等特点,可能产生跳跃谐振或等幅振荡,直接影响整个机械手液压伺服系统的动态特性。
本文主要研究水下液压机械手线性关节的阀控非对称缸位置伺服系统,在具体分析阀控非对称缸控制特性的基础上进行动态特性的推导、建模及仿真,为各线性关节伺服控制系统的设计和分析提供参考。
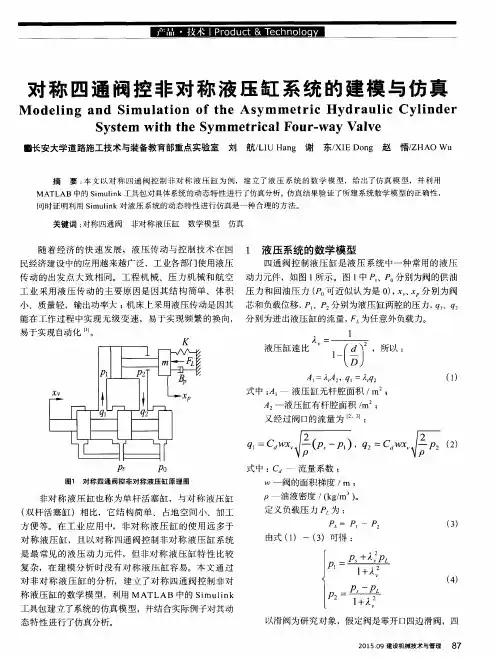
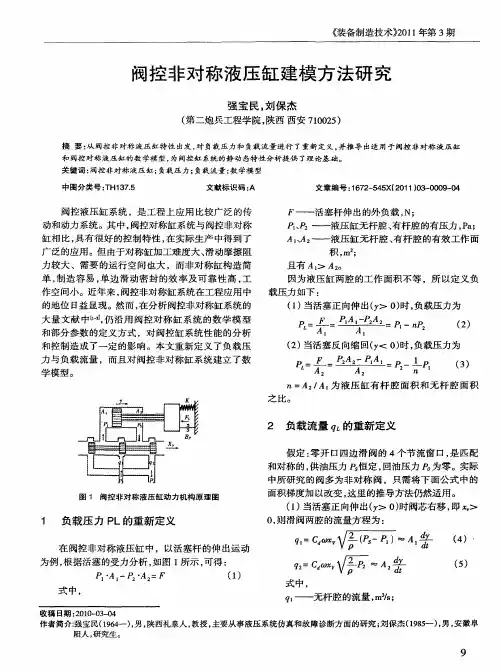
1阀控非对称液压缸位置伺服系统建模以非对称液压缸为研究对象,进行动态特性分析和数学建模,系统物理模型如图1所示。
图1伺服阀控非对称液压缸模型(1)伺服阀的负载压力-流量特性图1中,各物理量以箭头方向为正,以液压缸正向移动Y >0为例,伺服阀的流量方程为Q 1=C d WX v 2(p s -p 1)/r 姨=A 1d y(1)Q 2=C d WX v 2p 2/r 姨=A 2d yd t(2)式中Q 1———液压缸无杆腔流量,m 3/s ;Q 2———液压缸有杆腔流量,m 3/s ;C d ———阀的流量系数,取c d =0.7;W ———窗口面积梯度,m ;X v ———伺服阀位移,m ;p 1———伺服阀无杆腔压力,MPa ;p 2———伺服阀有杆腔压力,MPa ;p s ———油源压力,MPa ;r ———液压油密度,kg/m 3。
MECHANICAL ENGINEER阀控非对称液压缸数学模型及建模方法研究炘李晓园,陈,叶鹏,李鑫,徐祥,蒋辉,李琼柱(红塔烟草(集团)有限责任公司玉溪卷烟厂,云南玉溪653100)摘要:非对称液压缸两腔结构参数不同,给阀控非对称缸数学建模带来了较大的困难。
文中针对现行阀控非对称液压缸数学模型及简化方法作了分析比较,提出了一种新的简化方法,并据此导出了较为精确的数学模型。
关键词:非对称液压缸;数学模型;建模方法;辅助方程中图分类号:TH137文献标志码:A文章编号:1002-2333(2020)08-0104-04 Research on Mathematical Model and Modeling Method of Valve Controlled Asymmetric Hydraulic Cylinder LI Xiaoyuan,CHEN Xin,YE Peng,LI Xin,XU Xiang,JIANG Hui,LI Qiongzhu (The Second Workshop of Cigarette Packaging of Yuxi Cigarette Factory,Hongta Tobacco(group)Co.,Ltd.,Yuxi653100,China) Abstract:The structural parameters of the two chambers of the asymmetric hydraulic cylinder are different,which brings great difficulties to the mathematical modeling of the valve-controlled asymmetric cylinder.This paper analyzes and compares the current mathematical models and simplified methods of valve-controlled asymmetric hydraulic cylinders, proposes a new simplified method,and derives a more accurate mathematical model based on this.Keywords:asymmetric hydraulic cylinder;mathematical model;modeling method;auxiliary equation0引言液压控制系统的种类及分类方法很多,根据液压放大器与执行元件的不同组合,可分成阀控缸、阀控马达、泵控缸、泵控马达4种[1-2],其中阀控缸响应快、精度高、应用最广。
非对称油缸控制系统仿真及控制
李从心
【期刊名称】《中国机械工程》
【年(卷),期】1993(000)003
【总页数】1页(P4)
【作者】李从心
【作者单位】无
【正文语种】中文
【中图分类】TH137.51
【相关文献】
1.挖掘机非对称动臂油缸动态特性检测分析 [J], 陈刚;胡勇
2.非对称油缸受力方向对停位保持的影响 [J], 孙天健;李军
3.阀控非对称油缸正反向速度比的分析 [J], 周士昌;周恩涛
4.非对称油缸施力系统状态变量模型的建立 [J], 田富俊;周恩涛;周士昌
5.两串联非对称油缸的同步控制 [J], 刘庆和;陈斌
因版权原因,仅展示原文概要,查看原文内容请购买。