E+E传感器
- 格式:doc
- 大小:26.00 KB
- 文档页数:3
EPRO传感器安装原理及应用EPRO传感器是一种检测装置,EPRO传感器能感受到被测量的信息,EPRO传感器并能将感受到的信息,EPRO传感器按一定规律变换成为电信号或其他所需形式的信息输出,EPRO传感器以满足信息的传输、处理、存储、显示、记录和控制等要求。
EPRO传感器EPRO传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。
它是实现自动检测和自动控制的首要环节。
传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。
EPRO传感器通常根据其基本感知功能分为热敏元件、EPRO光敏元件、EPRO气敏元件、EPRO力敏元件、EPRO 磁敏元件、EPRO湿敏元件、EPRO声敏元件、EPRO放射线敏感元件、色敏元件和味敏元件等十大类。
EPRO传感器安装原理及应用EPRO传感器按用途:EPRO压力敏和EPRO力敏传感器、EPRO位置传感器、EPRO液位传感器、EPRO能耗传感器、EPRO速度传感器、EPRO加速度传感器、EPRO射线辐射传感器、EPRO热敏传感器。
EPRO传感器:能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置。
通常有敏感元件和转换元件组成。
1)敏感元件是指传感器中能直接(或响应)被测量的部分。
EPRO传感器2)转换元件指传感器中能较敏感元件感受(或响应)的被测量转换成是与EPRO 传感器传输和(或)测量的电信号部分。
2、测量范围:在允许误差限内被测量值的范围。
EPRO传感器3、量程:EPRO传感器测量范围上限值和下限值的代数差。
4、精确度:被测量的测量结果与真值间的一致程度。
EPRO传感器原装进口 EPRO传感器厂价直销 EPRO传感器中国总代理EPRO传感器型号如下:PR6202/50tC3 PR6202/50tC3E PR6202/50tC4 PR6202/50tC4E PR6202/6tC1PR6202/6tC1EPR6202/6tC3 PR6202/6tC3E PR6202/6tC4 PR6202/6tC4E PR6002/00S PR6002/01S PR6002/02S PR6002/03S PR6002/04S PR6002/05S PR6002/10S PR6002/11SPR6002/20SPR6002/21S PR6207/11C3 PR6207/11D1 PR6207/12C3 PR6207/12D1 PR6207/21C3 PR6207/21D1 PR6207/22C3 PR6207/22D1 PR6207/51C3 PR6207/51D1 PR6007/00N PR6007/00S PR6211/12D1 PR6211/13D1 PR6211/13D1E PR6211/13LT PR6211/14D1 PR6211/14D1E PR6211/22D1 PR6211/23D1 PR6211/23D1E PR6211/23LTPR6211/31D1PR6211/32D1 PR6211/33D1 PR6211/33D1E PR6211/51D1 PR6211/52D1PR6211/52D1EPR6211/52LT PR6211/53D1 PR6211/53D1E PR6211/53LT PR6011/00N PR6011/00S PR6011/03N PR6011/10N PR6011/10S PR6011/11N PR6011/11S PR6011/20NPR6011/20SPR6011/30N PR6011/30S PR6011/40N PR6011/40S PR6221/20tC3 PR6221/20tC3 PR6221/20tC4 PR6221/20tC4E PR6221/20tC5 PR6221/20tC5E PR6221/20tC6 PR6221/20tC6EPR6221/25tC3 PR6221/25tC3E PR6221/25tC4 PR6221/25tC4E PR6221/25tC5PR6221/25tC6 PR6221/25tC6E PR6221/30tC3 PR6221/30tC3E PR6221/30tC4 PR6221/30tC4EPR6221/30tC5 PR6221/30tC5E PR6221/30tC6 PR6221/30tC6E PR6221/50tC3 PR6221/50tC3EPR6221/50tC4E PR6221/50tC5 PR6221/50tC5E PR6221/60tC3 PR6221/60tC3E PR6221/60tC4PR6221/60tC4E PR6221/60tC5 PR6221/60tC5E PR6221/75tC3 PR6221/75tC3E PR6221/75tC4PR6221/75tC4E PR6221/75tC5 PR6221/75tC5E PR6021/00N PR6021/01NPR6021/08EPRO传感器原装进口 EPRO传感器厂价直销 EPRO传感器中国总代理PR6021/68S PR6241/12D1 PR6241/12D1E PR6241/13C3 PR6241/13C3EPR6241/13C6PR6241/13C6E PR6241/13D1 PR6241/13D1E PR6241/22C3 PR6241/22C3EPR6241/22C6PR6241/22C6E PR6241/22D1 PR6241/22D1E PR6241/23C3 PR6241/23C3EPR6241/23C6PR6241/23C6E PR6241/23D1 PR6241/23D1E PR6241/32C3 PR6241/32C3EPR6241/32C6PR6241/32C6E PR6241/32D1 PR6241/32D1E PR6241/33C3 PR6241/33C3EPR6241/33C6PR6241/33C6E PR6241/33D1 PR6241/33D1E PR6241/52C3 PR6241/52C3EPR6241/52C6PR6241/52C6E PR6241/52D1 PR6241/52D1E PR6241/53C3 PR6241/53C3EPR6241/53D1PR6241/53D1E PR6041/03N PR6041/30N PR6041/30S PR6041/40N PR6041/40S PR6041/51SPR6043/30N PR6043/30S PR6043/31S PR6043/40N PR6043/40S PR6246/12D1 PR6246/12D1EPR6246/13C3 PR6246/13C3E PR6246/13C6 PR6246/13C6E PR6246/13D1PR6246/13D1EPR6246/22C3 PR6246/22C3E PR6246/22C6 PR6246/22C6E PR6246/22D1PR6246/22D1PR6246/23C3 PR6246/23C3E PR6246/23C6 PR6246/23C6E PR6246/23D1PR6246/23D1EPR6246/32C3 PR6246/32C3E PR6246/32C6 PR6246/32C6E PR6246/32D1PR6246/32D1EPR6246/33C3 PR6246/33C3E PR6246/33C6 PR6246/33C6E PR6246/33D1PR6246/33D1EEPRO传感器原装进口 EPRO传感器厂价直销 EPRO传感器中国总代理PR6246/52C3 PR6246/52C3E PR6246/52C6 PR6246/52C6E PR6246/52D1PR6246/52D1EPR6046/00N PR6046/00S PR6046/11N PR6046/11S PR6251/13L PR6251/13LAPR6251/13LE PR6251/14L PR6251/14LA PR6251/14LAC PR6251/14LE PR6251/23L PR6251/23LA PR6251/23LAC PR6251/23LE PR6251/24L PR6251/24LAPR6251/24LACPR6251/24LE PR6251/33L PR6251/33LA PR6251/33LAC PR6251/33LE PR6251/52L PR6251/52LA PR6251/52LAC PR6251/52LE PR6251/53L PR6251/53LAPR6251/53LACPR6251/53LE PR6051/00S PR6051/02 PR6051/10S PR6051/11S PR6151/05C1 PR6151/05C2PR6151/11C1 PR6151/11C2 PR6151/21C1 PR6151/21C2 PR6151/31C1 PR6151/31C2 PR6151/51C1 PR6151/51C2 PR6130/04N PR6130/08 PR6130/64S PR6130/68S PR6135/01PR6135/01A PR6135/11 PR6135/12 PR6135/21 PR6135/22A PR6135/31 PR6135/32 PR6135/51PR6136/01 PR6136/01A PR6136/12 PR6136/22A PR6136/32 PR6136/51PR6201/13D1PR6201/13L PR6201/13LA PR6201/14C3 PR6201/14C3E PR6201/14D1PR6201/14D1EPR6201/14L PR6201/14LA PR6201/15L PR6201/15LA PR6201/15N PR6201/15NE PR6201/13D1EPR6201/23C3 PR6201/23C3E PR6201/23D1 PR6201/23D1E PR6201/23LPR6201/23LAPR6201/24C3 PR6201/24C3E PR6201/24C4 PR6201/24C4E PR6201/24C5PR6201/24C5EPR6201/24C6 PR6201/24C6E PR6201/24D1 PR6201/24D1E PR6201/24LPR6201/24LAPR6201/25LA PR6201/25N PR6201/25NE PR6201/35N PR6201/35NEPR6201/54D1PR6201/33C3 PR6201/33C3E PR6201/33D1 PR6201/33D1E PR6201/33LPR6201/33LAEPRO传感器安装原理及应用EPRO传感器使用说明EPRO传感器早已渗透到诸如工业生产、宇宙开发、海洋探测、环境保护、资源调查、医学诊断、生物工程、甚至文物保护等等极其之泛的领域。


MS-CRD-PTI-ERev 2 11-08-WEL工业压力传感器用户手册 E 型E 型世伟洛克® (Swagelok)工业压力传感器可在各种各样的工业应用中提供系统压力的电子监测。
E 型传感器是被特殊设计用于满足需要防爆等级的工业应用对耐久性和性能的要求。
®引言世伟洛克工业压力传感器允许在各种工业应用中对系统压力进行电子监控。
该产品的精度为极限点校准量程的 0.5 %(最佳拟合直线量程的 0.25 %),且拥有温度补偿,能在温度波动的应用环境下确保准确性和长期稳定性。
传感器可提供各种压力连接,额定压力,压力单位和信号输出以满足众多应用需求。
■ 安全图标 ............................. 1■ 安全使用说明 ......................... 1■ 机械安装 ............................. 2■ 使用与维护 ........................... 2■ 电气安装 ............................. 2■ 接线图............................... 3■ FM 和CSA 认证 ....................... 3■ 故障排除指南 . (4)目录可能造成生命危险或严重伤害。
可能由于弹射出的部件造成生命危险或严重伤害。
可能由于高热的表面造成燃烧的危险。
注意,重要信息该产品由 CSA International 测试并鉴定。
产品在安全方面满足适用的加拿大标准。
该产品由FM Approvals 测试并鉴定。
产品在安全方面满足适用的美国标准。
警告警告警告安全图标为了正确和安全的使用,必须根据NEC 、适用的本地规范以及本说明安装、使用和维护世伟洛克 E 型 传感器。
否则,可能发生严重的人身伤害和损失。
传感器上的电子连接必须按照初始状态使用,不能添加旁路或修改。
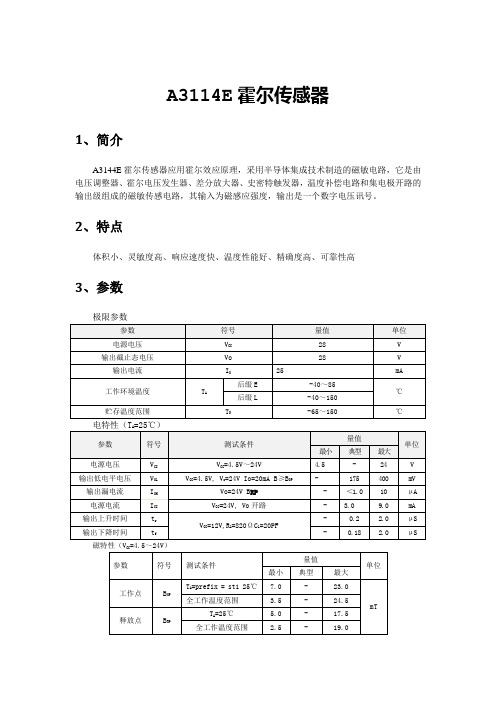
A3114E霍尔传感器
1、简介
A3144E霍尔传感器应用霍尔效应原理,采用半导体集成技术制造的磁敏电路,它是由电压调整器、霍尔电压发生器、差分放大器、史密特触发器,温度补偿电路和集电极开路的输出级组成的磁敏传感电路,其输入为磁感应强度,输出是一个数字电压讯号。
2、特点
体积小、灵敏度高、响应速度快、温度性能好、精确度高、可靠性高
3、参数
极限参数
电特性(T A=25℃)
磁特性(V CC=4.5~24V)
4、应用前景
无触点开关、汽车点火器、刹车电路、位置、转速检测与控制、安全报警装置、纺织控制系统
5、实物图片与接口
VCC:接电源正极3.3-5V
GND:接电源负极
DO:模块数字信号输出,有磁感应是输出低电平
AO:霍尔实时电压输出。


requirements» K nockout for ½” conduit fittingExternal mounting holes Easy and fast mounting withlectronics protected against construction site pollutionBayonet screws »O pen/close with a ¼ rotationEncapsulated electronics Mechanical protection Electronics on the underside of the board ptimum protection against mechanical Protected sensor surface and solder pads Tested according to automotive standard IP65 / NEMA 4EnclosureBACnet is a registered trademark of ASHRAE. ASHRAE does not endorse,approve or test products for compliance with ASHRAE standards. Compliance of listed products to the requirements of ASHRAE Standard 135 is the responsibility of BACnet International (BI). BTL is a registered trademark of BI.Test report according to DIN EN 10204 – 3.1Ordering GuideMODELOUTPUTPASSIVE T-SENSOR 1)TYPE FILTERhumidity + (HT)0-10 V(3x)Pt 100 DIN A (A)wall mount (PA)membrane (B)temperature4-20 mA (6x)Pt 1000 DIN A (C)duct mount (PB)RS485(x3)NTC 10k(E)Ni1000, TK6180 (J)none(x)EE160-OUTPUT SCALINGSCALING 2)UNITtemperature(Tx)°C°Fmetric(M) -20...80 (024) 32...122 (076)non-metric (N)-40...60 (002)-40...140 (083) -10...50 (003) 0...140 (085) 0 (50)(004)20 (120)(015)PROTOCOLBAUDRATEPARITYSTOPBITSUNITModbus RTU 3) (1)9600 (A)odd (O) 1 stopbit (1)metric(M)BACnet MS/TP 4)(3)19200(B)even(E) 2 stopbit (2)non-metric(N)38400 (C)no parity (N)576005) (D)768005) (E)1152005)(F)Hardware configurationAnalogue outputs setupDigital interface setup1) Only with output 3x, 6x / T-sensor details see /R-T_Characteristics 2) Other scaling upon request3) Modbus Map and setup instructions: See User Guide and Modbus Application Note at /EE1604) Product Implementation Conformance Statement (PICS) available at /EE1605) Only for BACnetRecommended mounting scConduit adaptCable adap~55~2.16“Ø 12Ø 0.47“60 ±0.32.36 ±0.11“Ø > 16Ø > 0.63“60.24“90 ±0.33.54 ±0.11“Ø > 13Ø > 0.51“~205~8.07“1013.98“190.75“461.81“50.2“GASKET90 ±0.33.54 ±0.11“80.63.17“341.34“341.34“Ø 12Ø 0.47“50.2“Dimensions (mm/inch)Accessories (see data sheet …Accessories“)Product configuration software EE-PCS (free download: /EE160)Power supply adapterV03Protection cap for 12 mm probeHA010783USB configuration adapter for EE160-HTx3 (RS485)HA011066Product configuration adapter for EE160-HT3x/6x (analogue output)see data sheet EE-PCAEE160-HT6xAPAB-Tx003MModel: humidity + temperature Output: 4-20 mA Passive T-Sensor: Pt 100 DIN A Type: wall mount Filter: membrane Output scaling: temperature Scaling: -10...50 °C Unit: metricEE160-HTx3xPBB-1AE1NModel: humidity + temperature Output: RS485Type: duct mount Filter: membrane Protocol: Modbus RTU Baudrate: 9600Parity: even Stopbits: 1Unit: non-metricOrder Examples。
E+E温湿度传感器广州南创房工E+E温湿度传感器公司是世界上最大的温度测试仪器及相关附件制造商,生产适合各种温度测试要求的热电偶及其插头,产品使用广泛,可用于炉温曲线测试仪、测温仪、返修工作站、回流炉工业用变送器。
奥地利E+E的产品在30多个国家设立了国外办事处及售后服务中心,并在中国设立了广州南创传感器事业部,为奥地利E+E提供最佳的服务与解决方案。
E+E温湿度传感器EE33系列EE33-MFTA5ND05SW/BC3-T02-Td07 EE33-MFTC5025ND05SW/BC3-T02-Td07EE33-MFTB5ND05SW/BC3-T02-Td07 EE33-MFTD5025ND05SW/BC3-T02-Td07EE33-MFTE5025HA03ND05SW/BC3-T02-Td07 EE33-MFTI5025HA07ND05SW/BC3-T02-Td07EE33-MFTJ5025ND05SW/BC3-T02-Td07 EE33-MFTK5025ND05SW/BC3-T02-Td07E+E温湿度传感器EE31系列EE31-MFTA5SW/BC2-T07-Td03 EE31-MFTB55SW/BC2-T07-Td03EE31-MFTD5025SW/BC2-T07-Td03 EE31-PFTA5SW/BC2-T07-Td03EE31-PFTB55SW/BC2-T07-Td03 EE31-PFTC5055SW/BC2-T07-Td03EE31-PFTD5105SW/BC2-T07-Td03E+E温湿度传感器EE30EX系列EE30EX-A3P02/BC3-T05-Td14-60m EE30EX-A3P02/BC3-T05-Td14-60mEE30EX-D5056HA03P02/BC3-T05-Td14-60m EE30EX-D3056HA03P02/BC3-T05-Td14-60mEE30EX-E3056HA03P02/BC3-T05-Td14-60m EE30EX-E5056HA03P02/BC3-T05-Td14-60mEE30EX-E6056HA03P02/BC3-T05-Td14-60mE+E温湿度传感器EE23系列EE23-MFTA3025D03/AC2-Td04-M01 EE23-MFTA5025D03/AC2-Td04-M01EE23-MFTB6025D03/AC2-Td04-M01 EE23-PFTB3025D03/AC2-Td04-M01EE23-PFTC5025D03/AC2-Td04-M01 EE23-PFTA6025D03/AC2-Td04-M01EE23-PFTC6025D03/AC2-Td04-M01EE23-PFTC3-02-5C11-AB6-T10EE23-PFTC3-02-5C11/HC01-AB6-T10E+E温湿度传感器EE22系列EE22-MFT1A11D07/T07 EE22-MFT3F13C03/T07EE22-MFT6A26C03/T07 EE22-PFT1F11C03/T07EE22-PFT3F15C03/T07 EE22-PFT3A26C03/T07EE22-PFT6A29C03/T07E+E温湿度传感器暖通空调用变送器EE16系列 EE16-FT3A21 EE16-FT6A21 EE16-F3B21 EE16-F3A21 EE16-F6A21EE16-FP3A21 EE16-FP6A21EE16-FT3B53 EE16-FT6B53 EE21-T6A23/T03EE10-FT6D04E+E温湿度传感器EE08系列EE08-PFT1D602T02 EE08-PFT2E602T22 EE08-PFT7D602T22 EE08-PFP1E602T2 2EE08-PFP2D602T22 EE08-PFP7E602T22 EE08-PFP2E602T22E+E温湿度传感器湿度开关loadcells)EE14-A11 EE14-A16 EE14-A51-SWO1 EE14-A56-SWO1 EE14-B11EE14-B16 EE14-B56-SWO1 EE14-B51-SWO1 EE45-K500E+E温湿度传感器手持表HUMIPORT 05 HUMIPORT 05 IR HUMIPORT 10 HUMIPORT 20 OMNIPORT20E+E温湿度传感器温湿度计EE02-FT01 EE02-FT01-L01E+E温湿度传感器高精度湿度发生器HUMOR 20E+E温湿度传感器温度系列EE10-T3-E01-T04 EE10-T3-D04-T31 EE10-T3-D04-T04EE10-T6-E01-T04 EE10-T6-E01-T55 EE10-T6-D04-T04EE10-PA EE10-PB EE10-PC EE10-PDEE16-T3A21 EE16-T6A24 EE16-T6A24 EE16-T3B21 EE16-T3B51 EE16-T6B5 4EE16-PAA21 EE16-PBA24 EE16-PCB21 EE16-PDB51E+E温湿度传感器露点紧凑型露点温度变送器及开关EE372-TEHA03D08/CD2-Td03 EE372-TEHA07D08/CD2-Td03EE372-TIHA03D08/CD3-Td03 EE372-TIHA07D08/CD2-Td03EE372-SEHA03D08/CD2-Td03 EE372-SIHA07D08/CD2-Td03EE372-SEHA07D08/CD2-Td03……EE375-TEHA03/C3-Td03 EE375-TEHA03/C6-Td03 EE375-TEHA07/D3-Td03 EE3 75-TEHA07/D6-Td03EE375-TEHA07/P3-Td03 EE375-TEHA08/P3-Td03 EE375-TEHA08/P6-Td03E+E温湿度传感器HUMIPORT系列:手持式温湿度表HUMIMAP 20系列:多通道相对湿度、温度、露点、绝对湿度…测量设备HUMLOG10系列:温湿度数据记录仪HUMOR20系列:高精度湿度发生器OMNIPORT系列:多功能手持表THERMOPORT 20系列:手持式温度表VELOPORT 20系列:手持式风速表以上内容技术参数以《OIML60号国际建议》92年版为基础,最新具体变化可查看《JJG669—奥地利E+E广州南创传感器事业部检定规程》。
gp2y0e03传感器技术手册摘要:1.GP2Y0E03 传感器概述2.GP2Y0E03 传感器的技术参数3.GP2Y0E03 传感器的工作原理4.GP2Y0E03 传感器的应用领域5.GP2Y0E03 传感器的优缺点分析正文:【GP2Y0E03 传感器概述】GP2Y0E03 传感器是一款高性能的红外传感器,具有灵敏度高、测量范围广、抗干扰能力强等优点。
它适用于各种需要检测物体存在的应用场景,如自动控制、安防监控、智能家居等。
【GP2Y0E03 传感器的技术参数】GP2Y0E03 传感器的主要技术参数如下:- 工作电压:3.3V-5V- 工作电流:10mA- 检测距离:2cm-30cm- 输出方式:数字输出(高电平或低电平)- 响应时间:1ms- 抗干扰能力:强- 工作温度:-20℃-70℃【GP2Y0E03 传感器的工作原理】GP2Y0E03 传感器的工作原理基于红外热释电原理。
当有物体靠近传感器时,物体会吸收传感器发射的红外光,使传感器的温度升高,从而导致传感器的热释电电流增大。
传感器通过检测热释电电流的变化,判断物体是否存在。
【GP2Y0E03 传感器的应用领域】GP2Y0E03 传感器广泛应用于以下领域:1.自动控制:用于自动开关、自动门禁等场景。
2.安防监控:用于入侵报警、视频监控等场景。
3.智能家居:用于智能家居设备、智能灯具等场景。
4.工业自动化:用于生产线自动检测、机器人导航等场景。
【GP2Y0E03 传感器的优缺点分析】优点:1.灵敏度高,能够检测到距离较远的物体。
2.测量范围广,适用于各种应用场景。
3.抗干扰能力强,不受环境光、温度等因素影响。
4.响应速度快,能够实时检测物体变化。
缺点:1.对环境温度敏感,温度变化会影响传感器的性能。
第14卷第1期2008年2月上海大学学报(自然科学版)JOURNAL OF SHANGHA IUN I V ERSI TY (NAT URAL SC I E NCE )Vol .14No .1Feb .2008收稿日期:2006211214 基金项目:上海市科委重大科技攻关项目(05dz15004)通信作者:施惠昌(1954~),男,教授,博士生导师,研究方向为信号与信息处理、在线检测等.E 2mail:shcshui@staff .shu .edu .cn 文章编号:100722861(2008)0120001206无线传感器网络E 2Eucli dean 集中式定位算法欧阳宇, 王 潮, 施惠昌(上海大学通信与信息工程学院,上海200072)摘要:针对无线传感器网络特点,在算法初始阶段,增加计算信标点到待定位点Euclidean (欧几里德)距离,用最大似然粗略估计节点位置,根据此初始位置用最小二乘的加权融合思想循环求精.提出多跳Euclidean 距离计算方法,对其多解提出解决方案.在对加权矩阵的求解提出新看法的基础上,搜索满足定位条件的待定位节点,定位后的节点升级为辅助信标点.仿真结果表明,在网络连通度为8的条件下,这是一种精度高、覆盖率高的实用性算法.关键词:无线传感器网络;定位;集中式;增强型欧几里德中图分类号:TP 393 文献标识码:AE 2Eucli dean Cen tra li zed L oca li za ti on i n W i reless Sen sor NetworksOUY ANG Yu, WANG Chao, SH I Hui 2chang(School of Communicati on and I nfor mati on Engineering,Shanghai University,Shanghai 200072,China )Abstract:W e devel op an alg orithm that computes the Euclidean distance bet w een beacon node and or phan node,esti m ates the positi on of or phan node by maxi m u m likely 2hood algorithm s,and acquires a more p recise positi on by the WLS calculating iteratively .Three methods are given t o s olve the p r oble m s of multi 2hop s Euclidean distances .Based on a ne w op ini on over the weighted matrix,the algorithm makes overall p lans t o l ook f or or phan nodes up t o the l ocalizati on conditi ons .The or phan node becomesassistant beacon node t o aid l ocalizati on after being l ocalized .Si m ulati on results de monstrate that the average err or of positi oning is l ower and coverage is better when connectivity is 8.Key words:wireless sens or net w orks;l ocalizati on;centralized computati on;E 2Euclidean 无线传感器网络(W ireless Sens or Net w orks,W S N )是由一组传感器构成的无线网络,节点间以Ad Hoc 方式进行通信,每个节点都可以充当路由器的角色,并且每个节点都具备动态搜索、定位和恢复连接的能力,其目的是协作地感知、采集和处理网络覆盖的地理区域中感知对象的信息,并发送给观察者[1].由于传感器节点微型化和有限的电池供电能力,使其在硬件的选择上受到限制,如成本、能量和体积等方面的限制,低功耗的节点是其最主要的设计目标.这些也使无线传感器网络的定位受到了新的挑战.全球定位系统(Gl obal Positi oning Syste m ,GPS )是目前使用最广泛且精度最高的定位服务,但是GPS 的功耗和成本是传感器节点无法接受的.因此必须针对其密集性,以及节点的计算、存储和通信等能力都有限的特点设计有效的低功耗的定位算法.近年来,国内外的大学和研究机构提出了许多专用于无线传感器网络的定位算法和系统.王福豹等对这些算法的原理和特点作了较详尽的分析和描述[1],总结了定位系统和算法的性能评价标准以及分类方法.1 集中式计算分析集中式计算是指把所需信息传送到某个中心节点(例如一台服务器),并在那里进行节点定位计算的方式.与集中式计算相对应的分布式计算是指依赖节点间的信息交换和协调,由节点自行计算的定位方式.集中式计算的优点在于从全局角度统筹规划,计算量和存储量几乎没有限制,可以进行迭代运算实现细定位.它的缺点包括与中心节点位置较近的节点会因为通信开销大而过早地消耗完电能,导致整个网络与中心节点信息交流中断,无法实时定位等.目前已有的集中式定位算法[1]包括凸优化(convex op ti m izati on)、MDS2MAP等.N2hop multilate2 ralti on p ri m itive定位算法可以根据应用需求采用两种不同的计算模式.在实际应用中,完全对等的无线传感器网络,即没有中心或汇聚节点的网络是没有意义的网络,因为无线传感器网络的目的就是将感知对象的数据通过Ad Hoc,观察者就是网络的中心,所以W S N中必定有控制中心.因此集中式定位系统是可行的.为了实现集中式定位,需要对网络层路由协议做以下修改:(1)增加用于检测邻居信息的HELLO 数据包;(2)每个节点增加邻居链表,用于保存其邻居节点信息,包括邻居节点I D,通过RSSI(Received Signal Strength I ndicat or)或T OA(Ti m e of A rrival)或T DOA(Ti m e D ifference of A rrival)等测距方法获得与此邻居节点间的距离值;(3)将邻居链表附加在数据包后随数据报文一起传送到中心.综上所述,中心节点可以知道网络的已知条件: (1)任一节点的邻居节点I D,所以网络的拓扑图可以得到,由拓扑图可以计算出两点之间的最小跳数;(2)任一节点知道与其1跳邻居节点间的距离;(3)信标节点的数量及其实际位置,一般信标节点数大于等于3个,且为网络节点总数的10%左右;(4)节点的最大射频距离;(5)测距误差服从零均值的高斯分布[2].2 算法分析为实现无线传感器网络定位,待定位点首先需要找到3个或3个以上的到其距离已知的信标点,然后由平面几何的关系列出方程并解此二元方程组.然而,由于W S N节点是随机布置的,且节点间是以Ad Hoc方式组网,在信标节点有限的情况下,大部分待定位节点1跳范围内并没有3个或更多的信标节点距离已知,因此本算法根据Euclidean(欧几里德)算法的思想,计算多跳节点间的距离.如果由待定位点寻找2跳、3跳里的信标点并计算距离值,并不一定能找到信标点,因此本算法由信标点寻找满足Euclidean距离条件的待定位点,由待定位点记录下此信标点及距离值.如果仅仅依靠有限的信标点实现W S N所有节点定位,几乎是不可能的,因此定位算法充分利用已定位点的信息,提高定位覆盖率.将已定位的节点升级为辅助信标点.但已定位点的位置信息不是真实的,因此赋予已定位点低于信标点的权值,以减少此已定位点对方程组求解的影响.同时,已定位点将作为辅助信标点参与定位,如果此已定位点误差较大,累积误差将非常严重,因此对每个节点采用加权最小二乘的思想迭代求精,减小定位的累积误差.又由于对于二元方程,加权矩阵是二阶方阵时,迭代是无意义的,因此,算法初始阶段由待定位点找4个或4个以上信标点参与定位.根据以上分析,我们提出E2Euclidean (Enhanced Euclidean,增强型欧几里德)集中式定位算法.信标节点指位置已知的节点;位置未知节点定位后升级为辅助信标节点;定位精度用定位误差值与节点无线射程的比例表示;定位覆盖率指可定位节点与总的待定位节点比例;网络连通度指单个节点的无线电波传输范围内的其他节点数量.3 提高定位覆盖率前面已经提出需要提高定位算法的覆盖率,每个节点1跳范围内很难满足有3个以上的信标节点参与定位,这样无法进行求精.Euclidean[324]为我们提供了一种计算多跳节点间距离的方法.3.1 2跳Eucli dean距离2跳Euclidean距离指信标节点与待定位节点最小跳数是2跳,如果求得它们之间的距离,待定位节点将增加一个信标节点参与定位.计算2跳2 上海大学学报(自然科学版)第14卷 Euclidean 距离节点需要满足的条件如图1,可以表述为:待定位节点与信标节点间最小跳数为2跳,此2点有2个共同的邻居节点nb 1、nb 2,且nb 1、nb 2互为邻居.例如图1中,信标节点3和待定位节点7最小跳数为2跳,共同邻居4和8又互为邻居,因此满足Euclidean 距离条件.图1 Eucli dean 距离示意图F i g .1 Exam ple of Eucli dean 图1中用实线相连的表示两相邻节点,距离通过RSSI 、T OA 或T DOA 已知,虚线是为方便讨论而添加的辅助线(下同),对于信标点3、7是其2跳节点.L 38(3和8间的距离,下同)、L 87、L 47、L 34、L 48已知,则根据平面几何关系,可以确定L 37.令α=∠384°,β=∠487°,ω=α+β.则[324] cos α=L238+L248-L2342×L 38×L 48, cos β=L 248+L 278-L 2472×L 48×L 78, cos ω=co s αco s β-sin αsin β, L 237=L 238+L 278-2×L 38×L 78cos ω,(1)σ2L 37=∑5L 375e2σ2e , e =L 38,L 78,L 47,L 48,L 34.(2)按式(1)可以确定L 37,式(2)是其方差.由几何关系可以知道cos ω有两个值,所以L 37有两个值,即节点7关于直线48对称有另外一个7号点,如图1所示.我们必须从这两个值中选择一个正确的距离值.我们提出以下3种方法对计算出来的Euclidean 距离进行筛选:(1)由网络的拓扑关系知7号对于信标点3是2跳节点,所以L 37必定满足R <L 37<2×R (R 为最大射频距离),根据此条件,图1中就可以排除虚线处的7号节点.如果L 37的两个值均满足这个条件,如图2中的7号节点就属于这种情况,则开始第二次筛选.(2)比较图2与图3,图2中只能通过3、4、8计算L 37,而图3比图2中多了一个节点6.通过点3、4、8,可以计算出两个L 37值L 137、L 237,通过3、6、8同样可以计算出两个L 37值L 337、L 437.前后两组解分别比较,选出两个最接近的值.假如L 137与L 337的接近度大于其他3种组合,则取L 37=(L 137+L 337)/2.甚至如果存在6点Euclidean 距离,求出3组解,比较这3组解,L 37将更精确.如果不存在这样的条件多次计算L 37,则开始第三次筛选.图2 4点计算Eucli dean 距离F i g .2 Eucli dean co m put a ti on w ith 4nodes图3 5点计算Eucli dean 距离F i g .3 Eucli dean co m put a ti on w ith 5nodes (3)每个节点都记录到参与定位的信标点的最新距离值,计算出来的Euclidean 值和记录中的距离值比较,根据距离值不能突变的原则,从中选择其一,如果仍不能判断,则放弃该待定位点,搜索新的待定位点.实验表明,网络连通度在5.6以上时,满足Euclidean 距离条件的节点很多,网络连通度是6.5时,结合下面3.2节所讲,按我们提出的定位算法,定位覆盖率可以达到80%以上.3.2 3跳Eucli dean 距离3跳Euclidean 距离及多跳Euclidean 距离与3.1节中定义相同,且3.1节是本节基础.如图4所示,对于信标点2,7和4是其2跳节点,6是其3跳节点.根据3.1中的方法,由2、8、5、4节点关系可以确定L 24,既然2到4的距离求得,那图4 3跳Eucli dean 距离F i g .4 Eucli dean propaga ti on when m i n i m u m hops are 3between beacon node and orphan node3 第1期欧阳宇,等:无线传感器网络E 2Euclidean 集中式定位算法么由2、8、4、7节点关系可以确定L27,所以同理由2、7、4、6节点关系可以确定L26,这样待定位点6到信标点2的距离就求得. 图4示例只是计算3跳Euclidean距离的一种情况,实际应用中有多种情况可以计算出多跳Euclidean距离,但计算2跳Euclidean距离是基础.实验表明,如果测距误差较小,多跳Euclidean距离接近真实值,但测距误差比较大的情况下,3跳以上的Euclidean距离将不再合理.4 测距误差情况下粗2细定位设第i个信标节点到待定位点的真实距离为d i,测距误差为e i,所以测量值d0i=d i+e i,其中, i=1,2,…,n(n>3),可得方程组(x1-x)2+(y1-y)2=(d1+e1)2,(x2-x)2+(y2-y)2=(d2+e2)2,…(xn-x)2+(y n-y)2=(d n+e n)2.(3)存在测距误差的定位方程组如式(3),假设ei偏大,则应该使第i个方程对整个方程组的求解影响最小.将此非线性方程组转化为线性的,从第二个方程开始减去第一个方程并整理得[(d1+e1)2-(d2+e2)2]+ (x22+y22)-(x21+y21)= 2(x2-x1)x+2(y2-y1)y,[(d1+e1)2-(d3+e3)2]+ (x23+y23)-(x21+y21)= 2(x3-x1)x+2(y3-y1)y, …[(d1+e1)2-(d n+e n)2]+ (x2n+y2n)-(x21+y21)= 2(xn -x1)x+2(y n-y1)y.(4)将误差移到等式右边整理得 (d21-d22)+(x22+y22)-(x21+y21)=2(x2-x1)x+2(y2-y1)y+(e22-e21)+2(d2e2-d1e1), (d21-d23)+(x23+y23)-(x21+y21)=2(x3-x1)x+2(y3-y1)y+(e23-e21)+2(d3e3-d1e1),(5) … (d21-d2n)+(x2n+y2n)-(x21+y21)=2(xn-x1)x+2(y n-y1)y+(e2n-e21)+2(d n e n-d1e1).可以表示为Y=AX+E,其中, Y=(d21-d22)+(x22+y22)-(x21+y21)(d21-d23)+(x23+y23)-(x21+y21)…(d21-d2n)+(x2n+y2n)-(x21+y21), A=2(x2-x1)2(y2-y1)2(x3-x1)2(y3-y1)……2(xn-x1)2(y n-y1), X=xy, E=e22-e21+2(d2e2-d1e1)e23-e21+2(d3e3-d1e1)…e2n-e21+2(d n e n-d1e1).(6) E是一个n-1维向量.求解此方程组可以按最小加权二乘法求解:^X=(A T WA)-1A T W Y.(7) 误差矢量Ei=(e2i-e21)+2(die i-d1e1),i=2, 3,…,n(n>3),实际上e iνd i,所以前一项可以忽略,因此误差矢量可以表示为E i=2(d i e i-d1e1).(8) 加权矩阵W=E[EE T]-1由式(8)决定.由于真实距离值di不知道,所以加权矩阵也无法求解.实际应用中采用如下粗细定位结合的方法.步骤1 用测量值代替真实值,即令di=d0i,同时ei服从零均值的高斯分布,因此按ML(极大似然估计)求得待定位点的粗略估计位置,记为(x,y0),此步骤可以称为粗定位.步骤2 细定位.一般传感器网络存在大量的冗余信息,所以采用加权融合的思想再次定位,减少测量误差对定位的影响.计算(x,y0)与各信标节点的距离值d1i(由d0i估计出的位置(x,y0)到第i个信标点的距离值,以下同,如d ji表示由d j-1i估计出的位置(xj-1,y j-1)到第i个信标点的距离值);令di=d1i,这样误差矢量E i可以求得,从而加权矩阵W可以确定;如果参与定位的节点有辅助信标点,加权矩阵中对应项乘以4 上海大学学报(自然科学版)第14卷 辅助信标点自身权值,按照式(7)再次计算待定位节点坐标,记为(x 1,y 1).步骤3 重复步骤2.计算(x j -1,y j -1)与各信标节点的距离值d ji ,令d i =d ji 求得(x j ,y j ).其中,i 为信标节点的个数,j 为迭代次数,j >2.算法说明:对于i =3,线性方程组中只有两个方程,不需要迭代,因为此时加权最小二乘与最大似然估计有相同的效果;当i >3时迭代才有意义,迭代次数j 根据用户需要的精度选取.实验表明,一般情况下迭代一次就能达到要求,即一次ML 粗定位一次WLS 细定位,迭代次数增多后,计算量增大但精度提高的程度不显著.由于在网络连通度低及信标节点有限的情况下,1跳邻居内有3个以上的信标节点直接定位的条件很难满足.利用前面提出的如何计算待定位节点与其多跳的信标节点之间的距离的方法,增加信标节点参与定位,既能提高定位的覆盖率,又能减小累积误差.同时,将已定位的节点升级为辅助信标点,加权矩阵中对应项乘以辅助信标点的自身权值,通常信标点自身权值为1,辅助信标点的权值选取比1小的一个值.5 算法仿真为了使仿真结果更加接近真实,模拟环境为:(1)所有节点包括信标节点都随机分布,服从均匀分布;(2)每次都选择不同的随机种子;(3)采用文献[2]的研究成果,测距误差服从零均值的高斯分布;(4)在每种不同的条件下各仿真50次,每次仿真结束后都输出一些数据,如实现定位的节点数,平均定位误差(不包括未实现定位的节点),最后分别对不同条件下的结果进行平均.在2000m ×1000m 的二维区域,随机分布200个节点,5%、10%、20%个信标点,网络平均连通度为9的情况下,节点最大无线通信半径设为120m ,在测距误差分别为5%、10%、20%、30%、40%、50%的条件下各仿真50次.定位精度比较如图5所示. 通过实验可以看出,与Euclidean 相比,E 2Euclidean 算法能更好地减小累积误差,特别是在信标点数多的情况下,能更好地适应测距误差的变化.主要原因是本算法由控制中心按一定的顺序定位,每定位一节点均对其采用循环迭代的方法减少测距误差的影响.图5 定位精度比较F i g .5 Positi on error con tra st 本算法在网络平均连通度是7.5、9.5、11.5,信标点为10%的条件下,性能分析如图6.可以看出本算法在测距误差较小的情况下,网络连通度对算法的影响不明显,测距误差大时,连通度高更能适应误差的变化,有效地抑制了定位误差的影响.同时,实验表明,本集中式定位算法在网络连通度是7.5以上时,定位覆盖率已经达到85%以上.图6 E 2Eucli dean 随网络连通度变化的性能分析F i g .6 Perfor mance ana lysis of E 2Eucli dean w ithcoverage d i fferences6 结束语本算法比ML 、Euclidean 算法定位覆盖率高,且精度更高.因为本算法从拥有4个或4个以上的信标点的待定位节点入手,采用迭代的方法减小其定位误差,使其对后面的节点定位影响减至最少,并将其升级为辅助信标点来提高定位覆盖率,这样,定位覆盖率提高的同时累积误差也会减小.特别是在信标点较多的情况下,本算法尤为实用.同时,本算法和Euclidean 一样,不像DV 2D I ST ANCE 那样受网络拓扑结构的影响[324].同时,对于W S N 低功耗的节点是其设计的主要目标之一,因此,任何定位技术必须考虑能量约束,5 第1期欧阳宇,等:无线传感器网络E 2Euclidean 集中式定位算法 节能策略仍然是W S N研究难点.本定位算法将每个节点的邻居信息附加在数据报文之后,且邻居数一般不会过多,对数据报文影响少,由能量充足、计算能力强的中心节点实现整个网络定位,通信额外开销小,因此,本算法不会增加网络能量消耗.近年来,对Ad Hoc W S N的定位问题有了许多新颖的解决方案和思想.除了文献[1]中列举的,文献[5]中提出了Map2gr owing算法,主要适合网络拓扑不规则的情况,但该算法存在没有消除累积误差的缺点;文献[6]中提出了一种基于移动信标点的定位方案,有一定的参考价值.但是,这个领域的研究从总体上说尚处于一个起步的阶段,已有的研究工作正在为该领域提出越来越多需要解决的问题.我们认为采用粗定位2细定位的方式有很多可取的地方,但在细定位时,寻找一个目标函数使循环到最优解时停止迭代仍是一个难点.而且定位算法受网络物理层、MAC、路由、传输层等的影响.参考文献:[1] 王福豹,史龙,任丰原.无线传感器网络中的自身定位系统和算法[J].软件学报,2005,16(5):8572868.[2] WH I TEHOUSE K,CULLER D.Calibrati on as para meteresti m ati on in sens or net w orks[C]//First AC MI nternati onalWorkshop on W ireless Sens or Net w orks andApp licati on(W S NA),A tlanta,G A.2002:59267.[3] N I C OLESC U D,NATH B.Ad2Hoc positi oning syste m s(APS)[C]//Pr oc of the2001I EEE Gl obal Telecomm2unicati ons Conf.San Ant oni o:I EEE Communicati onsSociety,2001,5:292622931.[4] N I C ULESC U D,NATH B.DV based positi oning in AdHoc net w orks[J].Journal of Telecommunicati onSyste m s,2003,22(1/4):2672280.[5] L I X L,SH I H C,SHANG Y.A map gr owingl ocalizati on algorith m for Ad2Hoc wireless sens or net w orks[C]//Pr oceedings of the Tenth I nternati onal Conferenceon Parallel and D istributed Syste m s(I CP ADS’04).2004:3952402.[6] SI CH I TI U M L,RAMADURA I V.Localizati on ofW ireless Sens or Net w orks with a mobile beacon[C]//I EEE I nternati onal Conference on Mobile Ad2Hoc andSens or Syste m s.2004:1742183.(编辑:赵 宇)・简讯・我校焦正、罗均、严泉三位博士入选2007年度曙光学者2007年度“曙光计划”又有新人推出.根据日前公布的评审结果,本市高校推荐的126位青年教师通过项目答辩,其中57位学者脱颖而出,我校环化学院焦正博士、机自学院罗均博士和文学院严泉博士榜上有名.由上海市教育基金会资助、市教委共同实施的曙光计划,1995年启动12年来,对本市高校优秀青年骨干教师的培养起到了很大的推动作用,完成了一批高质量的科研项目,在基础研究、社会科学研究、高新技术领域以及经济建设和社会发展中作出了积极的贡献,已经形成了一支高水平的曙光学者队伍,有的曙光学者已经成为高校的栋梁之才,曙光效应日益凸现.我校这次获准资助的曙光项目分别为:焦正的“纳米二氧化钛对神经干细胞的生物效应”;罗均的“用于小型无人旋翼机的非对称变距定量规律实验研究”;严泉的“台湾地区立法机构大陆政策过程研究”.学校将重视“曙光计划”的项目管理,保障入选者的工作条件,确保项目取得良好成绩.(科技处、文科处) 6 上海大学学报(自然科学版)第14卷 。
传感器eptfe透气膜的重要性
传感器是用来对于外界环境某些因素的改变,以及对一些属性进行实时测量,然后以某种方式展现出来的一种较为精密的电子设备,所以传感器通常会工作在环境不断变化并且较为复杂的环境中,比如说温度或者气压压力不断地波动会产生有较大的温度差和压差等,还有恶劣的天气比如雨雪和强风等自然现象都会对传感器造成一定的影响,但是如果在传感器安装了传感器eptfe透气膜之后就可以很好的对传感器做好防护,可以在一定程度上提高传感器的安全性和使用寿命。
因为传感器eptfe透气膜本身就是由防水透气膜贴覆以单面或者双面背胶制成的,所以在面对雨雪天气的时候也不会因为水进入传感器而造成过于潮湿的问题,雨水接触到传感器eptfe透气膜之后也是会被阻隔在防水透气膜外面的,所以下雨天气也不用考虑传感器的运行因为接触水而失灵或者不够灵敏了。
而传感器eptfe透气膜除了防水这个功能之外,传感器eptfe透气膜还具有多孔结构,而且有些传感器eptfe透气膜还贴附了过滤网,所以即使是下雪或者是强风天气带来的污垢和其它杂质等固体也是无法进入到传感器内部的,这样也就不会因为灰尘而使得传感器损坏了,可以确保传感器的运行性能稳定和结果准确。
最后就是传感器eptfe透气膜的很好的密封性以及透气性了,因为传感器在各种复杂的环境中运行,所以会有明显的由于压力变化或者温度变化而产生压力差和温度差,这样可能会导致传感器产品产生形变或由于压力过大而损害一些敏感元器件,而传感器eptfe透气膜良好的透气性可以快速的进行散热以及不断的进行传感器内外部的气体交换,这样就可以使得传感器内外的压力处于一个均衡的状态,并不会产生过大的压强而影响传感器。
E+E传感器
广州南创房工
E+E传感器公司是世界上最大的温度测试仪器及相关附件制造商,生产适合各种温度测试要求的热电偶及其插头,产品使用广泛,可用于炉温曲线测试仪、测温仪、返修工作站、回流炉工业用变送器。
奥地利E+E的产品在30多个国家设立了国外办事处及售后服务中心,并在中国设立了广州南创传感器事业部,为奥地利E+E提供最佳的服务与解决方案。
E+E传感器EE33系列
EE33-MFTA5ND05SW/BC3-T02-Td07 EE33-MFTC5025ND05SW/BC3-T02-Td07
EE33-MFTB5ND05SW/BC3-T02-Td07 EE33-MFTD5025ND05SW/BC3-T02-Td07
EE33-MFTE5025HA03ND05SW/BC3-T02-Td07 EE33-MFTI5025HA07ND05SW/BC3-T02 -Td07
EE33-MFTJ5025ND05SW/BC3-T02-Td07 EE33-MFTK5025ND05SW/BC3-T02-Td07
E+E传感器EE31系列
EE31-MFTA5SW/BC2-T07-Td03 EE31-MFTB55SW/BC2-T07-Td03
EE31-MFTD5025SW/BC2-T07-Td03 EE31-PFTA5SW/BC2-T07-Td03
EE31-PFTB55SW/BC2-T07-Td03 EE31-PFTC5055SW/BC2-T07-Td03
EE31-PFTD5105SW/BC2-T07-Td03
E+E传感器EE30EX系列
EE30EX-A3P02/BC3-T05-Td14-60m EE30EX-A3P02/BC3-T05-Td14-60m
EE30EX-D5056HA03P02/BC3-T05-Td14-60m EE30EX-D3056HA03P02/BC3-T05-Td1 4-60m
EE30EX-E3056HA03P02/BC3-T05-Td14-60m EE30EX-E5056HA03P02/BC3-T05-Td1 4-60m
EE30EX-E6056HA03P02/BC3-T05-Td14-60m
E+E传感器EE23系列
EE23-MFTA3025D03/AC2-Td04-M01 EE23-MFTA5025D03/AC2-Td04-M01
EE23-MFTB6025D03/AC2-Td04-M01 EE23-PFTB3025D03/AC2-Td04-M01
EE23-PFTC5025D03/AC2-Td04-M01 EE23-PFTA6025D03/AC2-Td04-M01
EE23-PFTC6025D03/AC2-Td04-M01
EE23-PFTC3-02-5C11-AB6-T10
EE23-PFTC3-02-5C11/HC01-AB6-T10
E+E传感器EE22系列
EE22-MFT1A11D07/T07 EE22-MFT3F13C03/T07
EE22-MFT6A26C03/T07 EE22-PFT1F11C03/T07
EE22-PFT3F15C03/T07 EE22-PFT3A26C03/T07
EE22-PFT6A29C03/T07
E+E传感器暖通空调用变送器
EE16系
列 EE16-FT3A21 EE16-FT6A21 EE16-F3B21 EE16-F3A21 EE16-F6A21
EE16-FP3A21 EE16-FP6A21
EE16-FT3B53 EE16-FT6B53 EE21-T6A23/T03
EE10-FT6D04
E+E传感器EE08系列
EE08-PFT1D602T02 EE08-PFT2E602T22 EE08-PFT7D602T22 EE08-PFP1E602T2 2
EE08-PFP2D602T22 EE08-PFP7E602T22 EE08-PFP2E602T22
E+E传感器湿度开关load
cells)EE14-A11 EE14-A16 EE14-A51-SWO1 EE14-A56-SWO1 EE14-B11
EE14-B16 EE14-B56-SWO1 EE14-B51-SWO1 EE45-K500
E+E传感器温度系列
EE10-T3-E01-T04 EE10-T3-D04-T31 EE10-T3-D04-T04
EE10-T6-E01-T04 EE10-T6-E01-T55 EE10-T6-D04-T04
EE10-PA EE10-PB EE10-PC EE10-PD
EE16-T3A21 EE16-T6A24 EE16-T6A24 EE16-T3B21 EE16-T3B51 EE16-T6B5 4
EE16-PAA21 EE16-PBA24 EE16-PCB21 EE16-PDB51
E+E传感器露点
紧凑型露点温度变送器及开关
EE372-TEHA03D08/CD2-Td03 EE372-TEHA07D08/CD2-Td03
EE372-TIHA03D08/CD3-Td03 EE372-TIHA07D08/CD2-Td03
EE372-SEHA03D08/CD2-Td03 EE372-SIHA07D08/CD2-Td03
EE372-SEHA07D08/CD2-Td03
……
EE375-TEHA03/C3-Td03 EE375-TEHA03/C6-Td03 EE375-TEHA07/D3-Td03 EE3
75-TEHA07/D6-Td03
EE375-TEHA07/P3-Td03 EE375-TEHA08/P3-Td03 EE375-TEHA08/P6-Td03
E+E传感器HUMIPORT系列:
手持式温湿度表
HUMIMAP 20系列:多通道相对湿度、温度、露点、绝对湿度…测量设备HUMLOG10系列:温湿度数据记录仪
HUMOR20系列:高精度湿度发生器
OMNIPORT系列:多功能手持表
THERMOPORT 20系列:手持式温度表
VELOPORT 20系列:手持式风速表
以上内容技术参数以《OIML60号国际建议》92年版为基础,最新具体变化可查看《JJG669—奥地利E+E广州南创传感器事业部检定规程》。