RMRS在延6_4_28UP连通井组中的应用
- 格式:pdf
- 大小:316.96 KB
- 文档页数:1
人员定位及无线通讯二合一系统在矿井中的应用人员定位及无线通讯二合一系统能够对出入矿井的人员进行24小时跟踪和定位,通过该系统地面管理人员能够实时掌握每个井下人员的具体位置,并且具备语音通话功能。
本文通过介绍该系统的系统结构,阐述系统的设计方案,研究分析系统的功能和运行效果,对于维护国家和人民的生命财产安全具有重要的意义。
标签:人员定位无线通讯以太环网基站定位卡对于平煤股份三矿,井下巷道长、作业点分散、人员流动性比较大,并且人员活动轨迹难以确定,安全生产信息在矿井上下之间难以及时传递,在一定程度上给矿井安全生产埋下隐患。
通过建立和完善人员管理系统,加快矿井现代化管理水平、提高产能,强化安全生产管理,维护国家和人民的生命财产安全具有重要意义。
1 系统结构本系统由三部分构成:第一部分:地面管理中心。
主要设备包括:管理主机、管理软件、机房配套设备。
在地面通过设置管理主机,对系统进行实时监管,实现数据信息进行管理,语音监听和录音,强拆等。
第二部分:数据传输部分。
该部分由以太环网、防爆电源、无线通信基站等构成。
第三部分:数据终端。
主要设备包括本安手机等终端设备,其作用是实现无线信号的全覆盖和通讯。
在系统中,数据通过无线通信基站进行传输,同时无线通信基站又作为无线信号覆盖的终端设备,实现有线和无线相互转换的重要设备。
2 系统方案设计2.1 工业以太网平台设计2.1.1 井下交换机布置地面监控中心布置一台支持三层动态路由功能的核心交换机,用于连接井下工业以太环网平台环网交换机。
地面监控中心交换机选用PT-7828-F-HV型核心交换机。
井下环网交换机选用三台KJJ137防爆千兆交换机,布置于平煤股份三矿己组中央变电所、己组采区变电所和戊组采区变电所三个地点。
设计8芯矿用阻燃光缆作为传输介质。
2.1.2 平台性能在传输速度、带宽容量、传输距离、抗干扰方面该平台独具优势。
在带宽方面,为传输数据、视频、语音提供了足够的带宽;整个网管系统具备自动报警功能,能够对全部综合自动化的网络设备进行实时监控。

连通水平井轨道对接控制技术作者:王洪松孟新法来源:《中国科技博览》2016年第14期[摘要]本文以煤层气开发为载体,从水平井轨迹末端对接控制的角度介绍了精确连通井的定位方法、轨迹控制技术和双井末端精确连通技术。
介绍了具体的施工措施,探索适合国情的双井精确连通技术和方法,以应对国内煤层气和芒硝矿等资源的开发。
这些技术措施的应用不仅避免和降低了井下事故的发生,且实现了优质快速高效开发,同时对开发非石油矿藏具有很好的借鉴意义。
[关键词]煤层气;连通井;轨迹控制;RMRS;磁定位;精确连通;双井中图分类号:TE21 文献标识码:A 文章编号:1009-914X(2016)14-0096-011 前言双井连通水平井的最终目标是有效钻穿目的层,而且与目标直井(造穴井)实现精确连通,因而末端精确连通是轨迹控制技术关键之中的关键,是检验双井精确连通成败的标准。
连通水平井的井眼轨道控制技术重点在以下三个方面:一是临井(排采井)的井眼轨道防斜打直控制技术;二是水平井(工程井)着陆前井眼轨迹控制技术,利用地质导向技术钻出数据准确、轨迹圆滑、入靶姿态良好的水平井是连通的基础;三是水平段穿越目的层,提高目的层穿透率井眼轨道控制技术;四是精确连通仪器的选择和使用,确保能精确掌握待连通两井相对位置与距离,实现两井精确顺利连通。
2 双井连通水平井分段轨迹控制技术2.1 水平井(工程井)着陆前的井眼轨道控制技术工程井造斜段的施工是工程井成功的基础,和其它水平井一样,轨迹控制的原则是选择合适的造斜工具,钻出规则平滑的井眼轨迹,最终形成准确的、可控的入靶姿态,有利于水平段施工。
针对煤层气工区施工的特点,井身轨迹控制还要注意以下几点:a、要选择适中造斜率的动力钻具。
由于煤层基岩以下成岩性强,经常发生卡钻事故,所以选择无扶正块或较小扶正块的单弯动力钻具更安全;b、地层可能钻遇含大块砾石的砾石层,尽管层较薄(一般2-5m),容易造成卡钻,而且工具造斜率明显下降,因此要制定相应的应对措施;c、目的层提前或滞后时的应对措施。
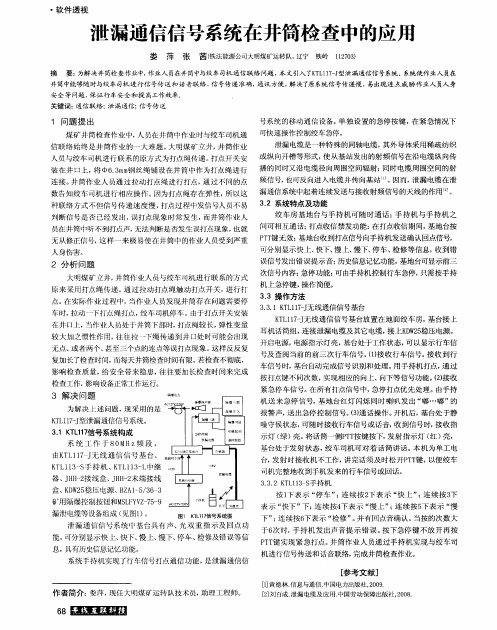
浅谈低频射频识别技术在矿井人员管理系统中的应用【提要】本文从煤矿人员安全系统的实际要求出发,介绍了其技术演变历程及应用特点;从全球煤矿行业人员管理系统的发展趋势得出最终结论,即低频技术将不容置疑地取代高频技术而在煤矿人员安全管理中发挥重要作用。
煤矿安全生产历来为我国各级政府所重视。
事故发生后如何实施安全救护、如何提高搜救工作效率,为煤矿各级主管部门所关注。
在分析近期几个煤矿发生的特大事故时发现:1、地面与井下人员的信息沟通不及时;2、地面人员难以及时动态掌握井下人员的分布及作业情况,进行精确的人员定位;3、煤矿事故一旦发生,抢险救灾、安全救护的效率底,搜救效果差。
为此,如何正确处理安全与生产、安全与效益的关系,如何准确、实时、快速履行煤矿安全监测职能,有效进行矿工管理,保证抢险救灾、安全救护的高速运作显得尤为重要和迫切。
一、目前我国煤矿所用的人员管理系统存在的问题我们知道,煤矿井下人员在巷道的位置是动态的,有些巷道长达几十公里,因此,对人员的跟踪定位是十分重要的。
一旦发生突发事件,要求能够迅速判断险区人员的数量、位置及身份,采取措施及时救助,把事故的损失和影响降到最低限度。
目前我国煤矿所采用的“人员管理系统”,其工作原理大致如下:在巷道的交叉口、入井口、进入采掘面入口等安装读卡器;每位入井人员(如矿工及管理人员等)随身携带身份识别卡;被检人员通过读卡器时其信息被记录,并传至地面监控主机,从而达到确定入井人员位置的目的。
根据笔者的调查和已经安装井下人员定位系统的煤矿反映,目前我国煤矿所采用的井下人员管理系统,全部是基于高频射频识别技术或混频射频识别技术而设计的,在使用中普遍存在如下问题:1、漏卡现象严重,难以满足精确定位的要求;2、如果不采用光纤总线,系统安装的安监点数就会受到限制,覆盖面有限,无法满足大型、特大型煤矿的全矿井巷道监测的要求;3、不具备行进方向的判断识别能力,不具备人员是否完全通过识别区域的判断能力。
RMRS 在延6-4-28UP 连通井组中的应用
黄德鑫(中石化胜利石油工程有限公司钻井工程技术公司
山东东营257000)
摘要:在山西煤层气开发中,连通井组的施工方式成为煤层
气开发有力措施,而RMRS 在连通井中的使用也越来越广泛。
通过RMRS 精确定位技术,为延6-4-28UP 井组连通作业提供了有力保障,提高了施工效率,缩短了全井组的建井时间,提高了经济效益。
同时也为今后该区块RMRS 同类井施工提供了宝贵经验。
关键词:RMRS ;连通井;煤层气开发;水平井对接一、引言
煤层气的开发利用对于缓解我国能源紧张局势、优化能源结构,减少温室气体排放、减轻大气污染,保证煤矿安全生产,以及实现我国国民经济可持续发展具有重大的现实意义。
山西省煤层气资源丰富,近年来在沁水、河东、西山、霍西、宁武等煤田均进行了煤层气的开采施工,而利用水平连通井开发煤层气资源在实际施工中取得了良好的成效。
延6-4-28UP水平井连通井组为典型的煤层气开发连通井,其构造位置位于鄂尔多斯盆地东缘延川南气田万宝山构造带,目的层位为山西组2号煤层。
该井组具有连通水平段长、直井井底位移较大,并且可开发有效煤层薄的特点。
在对接施工中,主要利用RMRS旋转磁铁测距仪进行对接测量工作,依据测量数据对井眼轨迹精确控制,最终实现顺利连通。
RMRS测距仪在山西煤层气开发连通水平井组的施工中,起到了重要的作用。
二、延6-4-28UP 井组情况
延6-4-28UP井组设计由水平井延6-4-28UP井和直井延6-4-28U井连通组成。
在井组施工中,先进行直井延6-4-28U井的施工,直井设计采用二级井身结构,由Φ177.80mm套管完井,套管串位于山西组2号煤层段位置处加入1根长8m左右玻璃钢套管。
固井后,下入扩孔器破碎煤层段的玻璃钢套管和水泥环,扩大2号煤层段的井眼直径至500mm。
在直井施工工作完成后,再进行水平井的施工,水平井采用三级井身结构,前部直井段和造斜井段施工钻进至距离直井100m左右下入RMRS测距仪,并在直井的2号煤层位置处采用电缆方式下入强磁接收器,实施连通钻进工作,精确控制轨迹直至连通完钻。
三、RMRS 连通仪工作原理
RMRS测距仪是由一个安装在钻头上端的强磁短节,利用有线绞车放置于目标井中的探管以及进行电源供应和数据传输的地面接口箱组成。
在连通作业时,通过螺杆马达带动下部强磁接头旋转,进而产生交变磁场,再由位于目标井中的探管进行测量,探管中的磁场传感器能够感应出磁场强度的变化,通过磁场变化感应进行相关的数据采集。
采集数据后,根据测点数据计算出当前的钻头位置,以及相对连通点位置偏移量及偏移角度,通过连续测量实时计算轨迹的闭合方位,及时调整工具面以修整轨迹。
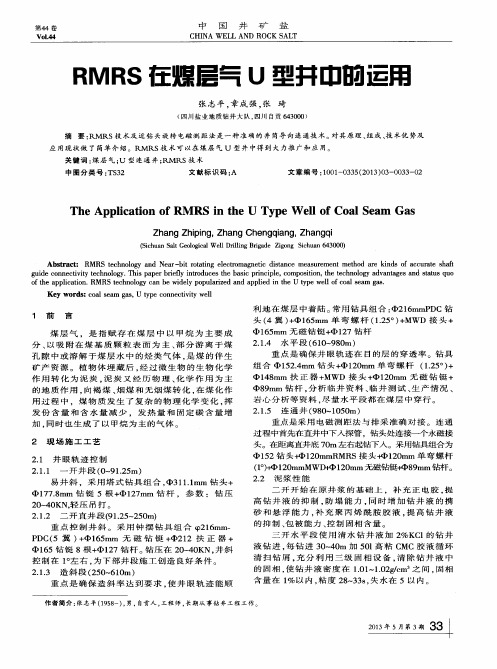
如图1所示,图中横坐标代表测点,纵坐标代表测点垂深,两条曲线分别是测点垂深和反推出的钻头位置垂深,两条虚线代表扩孔区域垂深,当钻头位置垂深进入到扩孔区域,表示按照当前轨迹趋势可以实现连通。
图1延6-4-28UP井连通数据图
两井连通时采用RMRS测距仪与YST-48R随钻测斜仪配
合使用,在直井下入RMRS探管,施工水平井钻头上部加强磁接
头,当旋转的强磁接头到达直井附近区域时,探管可采集强磁接头产生的磁场强度信号,接收仪器就可以不断地收到当前磁场的强度值(Hx、Hy和Hz)。
当检测到磁信号以后,通过测得数据进行钻头位置反推计算,再根据计算数据算出实钻轨迹相对连通点偏移量。
随着不断接近连通位置,测得的数据可信度也越来越高,不断调整轨迹,最终实现精确连通。
四、井眼轨迹控制
延6-4-28UP连通井组采用YST-48R随钻测量仪和RMRS旋转磁铁测距仪组合使用的方式,为连通作业轨迹调整提供数据。
钻至距离连通点80m时,仪器测得数据错误率低于60%,通过计算数据判断可以实现连通,连通施工中主要采取了以下措施进行数据测量及轨迹调整:
1.在连通作业开始后,每钻进3m后,根据YST-48R测斜数据,预测出井底钻头位置井斜和方位,输入landmark软件计算出井底南北、东西位置和垂深。
再将数据输入RMRS计算软件,开始进行磁信号测量工作;
2.在进行磁信号测量时,上提钻具静止,待RMRS测距仪开始工作时匀速下放钻具,位于目标直井中的探管测量强磁接头产生的磁信号,将测得数据输入RMRS计算软件,结合之前的YST-48R测量数据,计算出轨迹相对连通点的偏移角和偏移量;
3.根据RMRS软件计算出的数据,进行轨迹调整,使其满足连通要求;
4.为了确保连通精度,每钻进3 ̄4m重复上述步骤,及时调整轨迹,直至最终连通。
五、RMRS 连通作业中遇到的问题及解决
在钻进距连通位置5m时,根据RMRS测距仪测出数据得出当前趋势钻进可以连通,将探管从目标直井中取出后,继续钻进,但钻至连通位置后目标直井并未反出泥浆,表示未连通成功。
分析后怀疑可能存在两方面问题:首先,在仪器测量和数据计算时也有一定的误差,可能是误差同方向累积导致钻头实际位置未进入连通位置,但是这种情况几率很小;另外主要怀疑目标直井玻璃钢套管及水泥环破碎不够彻底。
在讨论后决定先采用在连通位置反复循环作业,试图扩大井底井径的方法实现连通,在连通位置进行反复循环划眼作业后,目标直井依然没有反出泥浆。
于是采用在目标直井进行加压作业,试图依靠增加目标直井连通位置压力实现连通,在压裂作业开始后,压裂作业车压力表显示没有升高迹象,此时施工水平井井口已开始反泥浆,证明连通成功,同时也验证了之前的推测。
在延6-4-28UP井完钻电测后,测得数据与YST-48R随钻测量仪得出数据基本一致,这证明了在施工中随钻测量仪和RMRS测距仪数据的准确性,连通作业中遇到的问题并非由于仪器误差累积导致,说明RMRS在连通井作业中,测量数据是可靠的。
参考文献:
[1]胡汉月,陈庆寿.RMRS 在水平井钻进中靶作业的应用[J].地质与勘探,2008,44(6):89-92.
[2]钱自卫,姜振泉,吴慧蕾.基于RMRS 的煤矿救援准确钻井技术[J].煤矿安全,2011,42(2):52-54.
[3]王彦祺.煤层气水平连通井钻井技术[J].中国煤层气,2010,7(2):28-31.
[4]宋强,陈宵,汤福彬,刘彬.RMRS 精确定位技术在岩盐开采中的应用[J].中国井矿盐,2011,5(3):21-23.。