基于Solidworks的机械手运动仿真设计
- 格式:doc
- 大小:24.50 KB
- 文档页数:2
基于Solidworks的机械手运动仿真设计0引言机械手对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,更能提高劳动生产率和自动化水平。
随着现代生产的机械化和自动化的发展对机器人的需求越来越大因而对机器人的末端执行机构机械手的研究尤为重要。
一些软件的发展为机械手的设计分析提供了方便降低了生产成本,本设计是基于Solidworks软件,使得设计效率大大提高[1]。
本文是为普通车床配套而设计的上料机械手。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
1机械手工作原理上料机械手直接与工件接触的部件,它能执行人手的抓握功能。
手抓取物体以物体为中心,用两根手指包络物体。
根据抓取物体时的相对状态,靠手指与工件之间的摩擦力来夹持工件。
本上料机械手采用二指平动手爪,属于夹持式手爪,手指由四杆机构带动,当上料机械手手爪夹紧和松开物体时,手指姿态不变,作平动。
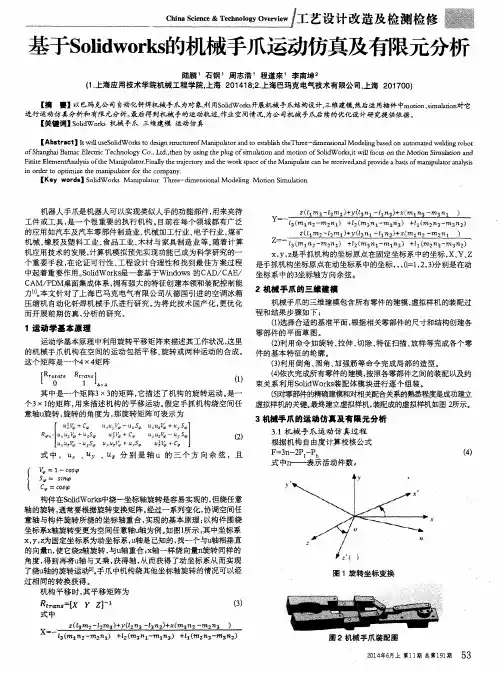
机械手手爪的结构见图1,①为支架、②气动杆、③和④为大螺钉、⑤和⑥为三孔连杆、⑦为小螺钉、⑧短连杆、⑨和⑩为手指。
通过气动杆②来传动力的,气缸带动气动杆②使之向上移动时,其它的杆件共同运动,此时手爪是处于握紧工件的过程;反之,当气缸带动气动杆②向下移动时, 手爪是处于张开的过程。
这样,用气缸带动连杆②做往复平动,从而使其它杆件运动,带动手爪张合,手指上的任意一点的运动轨迹为一弧摆动。
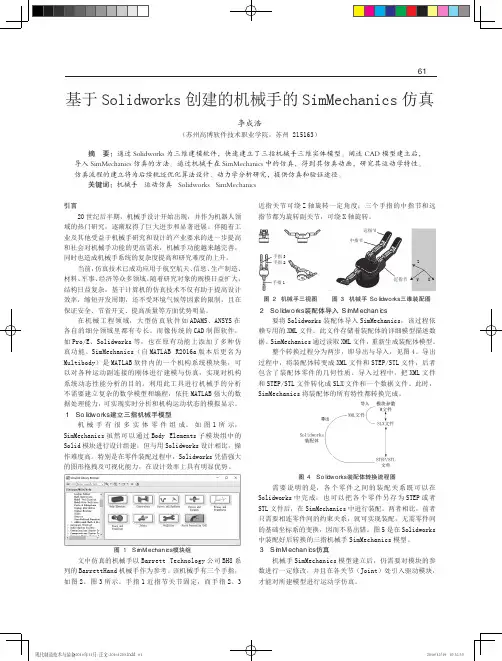
图1机械手装配简图2基于Solidworks机械手仿真动画设计2.1Solidworks介绍SolidWorks是一款功能强大的中高端CAD软件,方便快捷是其最大特色。
它有全面的零件实体建模、生成工作机构的分解动画制作和高级动画制作等功能该软件以参数化特征造型为基础,具有功能强大、易学、易用等特点,是当前最优秀的中档三维CAD软件之一。
Solidworks机械臂运动仿真注意事项简介Solidworks是一种强大的三维建模软件,具有广泛应用于机械工程和制造工业的功能。
机械臂是一种常见的工业机器人系统,用于执行各种复杂的任务。
在进行机械臂的设计和制造之前,进行仿真是非常重要的,可以帮助我们验证设计方案、识别潜在问题和优化机械臂的性能。
本文将介绍Solidworks机械臂运动仿真的注意事项。
1. 模型设计在进行机械臂的运动仿真之前,首先需要进行模型的设计。
模型设计要求准确、精细,模型的尺寸、结构和材料等要与实际机械臂相符。
同时,还需要考虑到机械臂的运动范围、工作负载和速度等因素,确保模型设计满足仿真需求。
2. 运动仿真设置在Solidworks中,设置机械臂的运动仿真是关键步骤之一。
仿真设置包括机械臂的关节、运动学和动力学参数等。
在进行机械臂的运动仿真前,需要确保设置的参数准确、合理,以保证模拟的真实性和准确性。
3. 约束条件在进行机械臂的运动仿真时,需要考虑机械臂的约束条件。
约束条件可以限制机械臂的运动范围,仿真过程中遵循现实情况下机械臂的运动限制。
例如,固定基座、限定关节的运动范围等。
4. 轨迹规划在机械臂的运动仿真中,轨迹规划是一个重要的步骤。
轨迹规划可以定义机械臂末端执行器的路径,使机械臂能够按照预定的轨迹进行运动。
轨迹规划需要考虑到机械臂的工作任务和工作环境,并根据需求进行优化。
5. 碰撞检测碰撞检测是机械臂运动仿真中一个重要的环节。
在进行仿真之前,需要对机械臂的各个部件进行碰撞检测,以避免在真实运动中发生碰撞。
Solidworks提供了碰撞检测功能,可以帮助我们及时发现和解决潜在的碰撞问题。
6. 运动分析和优化运动仿真完成后,可以对仿真结果进行分析和优化。
运动分析可以帮助我们了解机械臂的运动性能,如速度、加速度和力矩等。
根据分析结果,可以对机械臂进行优化,以改善其运动性能和工作效率。
7. 结果展示和报告生成在仿真完成后,可以生成仿真结果的图表和报告,用于展示和分析。
基于Solidworks的机械手爪运动仿真及有限元分析作者:陆鹏石钢周志浩程道来李南坤来源:《中国科技纵横》2014年第11期【摘要】以巴玛克公司自动化钎焊机械手爪为对象,利用SolidWorks开展机械手爪结构设计,三维建模,然后运用插件中motion、simulation对它进行运动仿真分析和有限元分析。
最后得到机械手的运动轨迹,作业空间情况,为公司机械手爪后续的优化设计研究提供依据。
【关键词】 SolidWorks 机械手爪三维建模运动仿真【Abstract】 It will useSolidWorks to design structureof Manipulator and to establish theThree-dimensional Modeling based on automated welding robot of Shanghai Bamac Electric Technology Co., Ltd.,then by using the plug of simulation and motion of SolidWorks,it will focus on the Motion Simulation and Finite ElementAnalysis of the Manipulator.Finally the trajectory and the work space of the Manipulate can be received,and provide a basis of manipulator analysis in order to optimize the manipulator for the company.【Key words】 SolidWorks Manipulator Three-dimensional Modeling Motion Simulation机器人手爪是机器人可以实现类似人手的功能部件,用来夹持工件或工具,是一个很重要的执行机构。
SolidWorks机器人运动学和动力学仿真技术研究在现代工业中,机器人技术的发展引领着生产制造的进步。
为了提高机器人的操作效率和准确性,研究人员一直致力于开发先进的仿真技术以模拟机器人的运动学和动力学。
其中,SolidWorks作为一款流行的三维设计软件,提供了强大的机器人运动学和动力学仿真工具,成为了研究人员的首选。
机器人的运动学和动力学是机器人技术中的两个重要概念。
运动学研究机器人的位置、速度、加速度和轨迹,而动力学则研究机器人受力状况以及对环境的相互作用。
运动学和动力学的仿真技术可通过SolidWorks的计算机辅助设计(CAD)环境进行实现。
首先,SolidWorks提供了完善的运动学仿真功能,可以准确地模拟机器人的运动轨迹和工作空间。
研究人员可以根据机器人的几何结构、连接关系和约束条件,使用SolidWorks进行运动学建模和仿真。
通过设置关节的运动范围、限制条件以及工作空间的约束,可以模拟机器人在不同任务下的运动情况。
运动学仿真结果可以帮助研究人员评估机器人的动作是否符合设计要求,并对机器人的性能进行分析和改进。
其次,SolidWorks还提供了强大的动力学仿真功能,可以模拟机器人受力情况和对环境的相互作用。
在机器人执行任务时,会受到来自外界的力和力矩,这些外界力会影响机器人的稳定性和动作效果。
通过建立机器人的物理模型,并加入机器人和环境之间的力学力和接触力,可以准确地模拟机器人在各种工作负载和环境条件下的动力学行为。
动力学仿真结果可以帮助研究人员评估机器人的可靠性和稳定性,为设计优化提供指导。
除此之外,SolidWorks还具有其他与机器人运动学和动力学仿真相关的功能。
例如,通过SolidWorks的可视化工具,研究人员可以实时观察机器人的运动过程,并生成动画以及运动轨迹图。
同时,SolidWorks还允许用户对机器人的设计进行参数化建模和优化,在仿真分析的基础上进行机械结构的改进、工作效率的提高等。
solidworks机械臂运动仿真注意事项SolidWorks机械臂运动仿真是一项重要的工程设计任务,它可以帮助工程师们在设计过程中模拟和验证机械臂的运动性能。
然而,要确保仿真结果准确可靠,需要注意以下几个方面。
一、建立准确的三维模型1. 确保所有零件和装配体的尺寸、形状和材料属性都准确无误。
2. 仔细检查模型中的接触面和连接方式,确保它们能够正确地传递力和扭矩。
3. 确保模型中所有零件之间的约束关系正确设置,并且与实际机械臂相符。
二、设置合理的物理特性1. 确定物体的质量、惯性矩阵和摩擦系数等物理属性,以便在仿真过程中准确地模拟运动行为。
2. 根据实际情况设置关节的刚度和阻尼参数,以获得更真实的仿真结果。
三、定义适当的运动学约束1. 根据机械臂的结构和自由度确定各个关节之间的运动学约束。
2. 设置关节极限角度,并确保在仿真过程中不会超出这些限制。
四、选择合适的仿真方法1. 根据具体需求选择适当的仿真方法,如正向运动学、逆向运动学、动力学仿真等。
2. 在进行大范围运动仿真时,可以采用分析模型和简化模型相结合的方式,以提高计算效率。
五、进行准确的边界条件设定1. 确定初始状态和边界条件,如机械臂的初始位置、速度和加速度等。
2. 设置外部力和扭矩,并根据实际情况调整其大小和方向。
六、进行合理的仿真参数设定1. 选择合适的时间步长,以平衡计算精度和计算效率。
2. 根据实际需求设置仿真时间长度,确保能够观察到完整的运动过程。
3. 对于复杂的机械臂系统,可以使用自适应时间步长来提高仿真精度。
七、分析和解释仿真结果1. 仔细观察并分析仿真结果,包括关节角度、位移、速度等参数。
2. 对比仿真结果与实际情况进行验证,并根据需要对模型进行修改和优化。
八、注意安全问题1. 在进行机械臂运动仿真时,要注意安全事项,确保没有人员或其他物体处于危险区域。
2. 对于高速运动的机械臂,要特别注意碰撞和冲击的可能性,并采取相应的防护措施。
基于SolidWorks和ADAMS的装车机械手运动仿真武金艺;黄金凤;李炜;田雪珂【期刊名称】《机床与液压》【年(卷),期】2016(044)009【摘要】For actural problems existed in today's cement loading transportation industry, a simple structure, easy control of bagged cement loading manipulator automatically was developed and designed. The entity model of truck loading manipulator was estab-lished by using three-dimension ( 3D) software SolidWorks, the model was imported into simulation software ADAMS environments, then appling constraints and drives to the model. Through the model of kinematics simulation analysis, the kinematics parameters of key components were gotten, and component motion characteristic curve was drawn. The analysis results can verify the rationality and feasi-bility of mechanism, and provide reference evidence for the motion control and the optimal design of mechanical structure of loading manipulator.%针对当今水泥装载运输行业中存在的实际问题,开发设计一种结构简单、控制容易的自动袋装水泥装车机械手.利用三维建模软件SolidWorks建立装车机械手的实体模型,将模型导入仿真软件ADAMS环境中,并进一步的添加约束和驱动等,通过对该模型进行运动学仿真分析,得到关键构件的运动学参数,绘出构件的运动特性曲线,验证机构设计的合理性和可行性,为机械手的运动控制及机械结构的优化设计提供参考依据.【总页数】5页(P52-56)【作者】武金艺;黄金凤;李炜;田雪珂【作者单位】华北理工大学机械工程学院, 河北唐山063009;华北理工大学机械工程学院, 河北唐山063009;华北理工大学机械工程学院, 河北唐山063009;华北理工大学机械工程学院, 河北唐山063009【正文语种】中文【中图分类】TP241;TH122【相关文献】1.基于Solidworks的机械手爪运动仿真及有限元分析 [J], 陆鹏;石钢;周志浩;程道来;李南坤2.基于ADAMS的钵苗移栽机械手设计及运动仿真 [J], 钟兴;王艳莉3.基于Solidworks和Adams行星式销齿轮研磨机的建模与运动仿真 [J], 吴耀宇;薛培军4.基于Solidworks的机械手运动仿真设计 [J], 郑向华5.基于Solidworks的机械手三维建模及其运动仿真 [J], 夏学文;李峰;郭小刚;张俊彦因版权原因,仅展示原文概要,查看原文内容请购买。
学士学位毕业论文(设计)基于SolidWorks六自由度焊接机械手三维运动模拟学生姓名:学号:指导教师:所在学院:工程学院专业:机械设计制造及其自动化摘要本文以六自由度焊接机械手部的三维运动仿真为背景。
介绍了国内外焊接机器人的发展状况并着重分析了六自由度焊接机械手运动原理和三维制图软件SolidWorks的应用,在此软件基础上对手部进行了绘制,运动分析和动画模拟。
对于SolidWorks制图软件主要介绍了其产生和发展的历史以及应用前景,具体介绍了零件三维制图的操作方法和运动过程,展示了SolidWorks强大的运动仿真功能。
重点分析了六自由度机械手的三维建模和建模后运动轨迹规划的实现关键词:SolidWorks ; cosmosmotion ; 三维运动模拟; 动画模拟AbstractIn this paper, welding robot of six degrees of freedom of hand motion simulation for the three-dimensional background. Welding robot at home and abroad and focus on the development of analysis of the welding robot of six degrees of freedom of hand movement and three-dimensional mapping principle SolidWorks software applications based on this software in the department of drawing opponents, motion analysis and animation simulation. Mapping software for SolidWorks introduces the emergence and development of its history and application specific parts introduced the method of operation of three-dimensional graphics and motion simulation of the operation of plug-ins COSMOSMotion process, demonstrated the powerful movement SolidWorks simulation. Analysis focused on the six degrees of freedom robot armmodeling of three-dimensional modeling and trajectory planning, after the realization of Key words::SolidWorks ; cosmosmotion ; simulation of 3D motion ; Animated Simulation目录摘要 (Ⅰ)前言 (1)第1章焊接机器人概述 (2)1.1 焊接机器人的发展 (2)1.1.1 国外焊接机器人的发展 (2)1.1.2 国内焊接机器人研究的历史及现状 (3)1.1.3 焊接机器人应用现状 (3)1.1.4 焊接机器人的发展趋势 (4)1.2 焊接机械手的组成、分类 (4)1.2.1 组成 (4)1.2.2 分类 (6)1.3 基本型式 (7)1.3.1 直角坐标式机械手 (7)1.3.2 圆柱坐标式机械手 (7)1.3.3 关节式机械手 (8)第2章计算机辅助设计和SolidWorks软件的发展 (9)2.1 计算机辅助设计的发展 (9)2.2 软件的特点及前景 (9)2.3 COSMOSMotion的应用及特点 (10)第3章焊接机械手的设计思想 (12)3.1 机械手特性方程式 (12)3.2 手臂的设计计算 (14)3.2.1 驱动力的计算 (14)3.2.2 水平回转时驱动力矩的计算 (14)3.2.3 偏重力矩的计算 (15)3.2.4焊接机械手各零部件的设计 (16)第4章三维实体建模 (25)4.1 模拟方案的确定 (25)4.2 仿真实体的绘制 (26)4.3 简单数学模型的建立 (26)4.4 模拟加载与仿真 (28)4.4.1 仿真模拟的实现 (28)4.4.2 进行运动校核 (30)4.4.3 结语 (30)总结 (31)致谢 (33)前言机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
基于Solidworks的机械手运动仿真设计
0引言
机械手对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,更能提高劳动生产率和自动化水平。
随着现代生产的机械化和自动化的发展对机器人的需求越来越大因而对机器人的末端执行机构机械手的研究尤为重要。
一些软件的发展为机械手的设计分析提供了方便降低了生产成本,本设计是基于Solidworks软件,使得设计效率大大提高[1]。
本文是为普通车床配套而设计的上料机械手。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
1机械手工作原理
上料机械手直接与工件接触的部件,它能执行人手的抓握功能。
手抓取物体以物体为中心,用两根手指包络物体。
根据抓取物体时的相对状态,靠手指与工件之间的摩擦力来夹持工件。
本上料机械手采用二指平动手爪,属于夹持式手爪,手指由四杆机构带动,当上料机械手手爪夹紧和松开物体时,手指姿态不变,作平动。
机械手手爪的结构见图1,①为支架、②气动杆、③和④为大螺钉、⑤和⑥为三孔连杆、⑦为小螺钉、⑧短连杆、⑨和⑩为手指。
通过气动杆②来传动力的,气缸带动气动杆②使之向上移动时,其它的杆件共同运动,此时手爪是处于握紧工件的过程;反之,当气缸带动气动杆②向下移动时, 手爪是处于张开的过程。
这样,用气缸带动连杆②做往复平动,从而使其它杆件运动,带动手爪张合,手指上的任意一点的运动轨迹为一弧摆动。
图1机械手装配简图
2基于Solidworks机械手仿真动画设计
2.1Solidworks介绍
SolidWorks是一款功能强大的中高端CAD软件,方便快捷是其最大特色。
它有全面的零件实体建模、生成工作机构的分解动画制作和高级动画制作等功能该软件以参数化特征造型为基础,具有功能强大、易学、易用等特点,是当前最优秀的中档三维CAD软件之一。
SolidWorks有全面的零件实体建模、生成工作机构的分解动画制作和高级动画制作等功能。
工作原理最好的表达方式莫过于动态仿真,因为动态仿真是一种传递工作过程中各组成零件动作情况的良好载体,它的特点就在于形象和直观。
Animator插件就是一个与Solidworks完全集成的动画制作软件插件,它能将Solidworks的三维模型实现动态的可视化,并且实时录制构件的模拟装配过程、模拟拆卸过程和构件的模拟工作过程,将构件的工作情况得到更好地表达,增强了人们对构件的认识和了解。
该软件在工业生产中的应用不但可以提高设计质量,缩短工程周期,还可以节约大量建设投资。
并且,随着信息技术在各领域的迅速渗透,CAD技术已经得到广泛的应用,从根本上改变了传统的设计、生产、组织模式对推动现有企业的技术改造、带动整个产业结构的变革、发展新型技术、促进经济增长都具有十分重要的意义[2][3]。
2.2机械手仿真动画的建立
1)启动SolidWorks,选择“文件”→打开机械手装配图,然后在工具栏中单击Animator,新建立一个,动画制作界面(如图2所示),设定机械手是通过气动杆来传力给手指;
图2动画制作界面
2)将机械手气动杆移动到初始位置;将时间滑杆拖到结束时间;将机械手气动杆移动到最终位置。
完成动画的时间设定;
3)选择主动件螺纹孔连杆,移动它,使两手指闭合到距离最短处,则设该位置为初始位置;
4)拖动时间码到15秒处即时间滑杆从00:00:00处移动到00:00:15处;
5)再次选中螺纹连杆,将其拖动到使两手指分开距离最大处。
此为零件的最终位置;
6)单击动画控制器弹出式工具栏的播放按钮,进行演示。
(其中螺纹连杆的时间线为绿色,其余零件时间线为黄色,因为螺纹连杆是主动件后面的零件为从动件)上面三步使机械手完成一个由张开到闭合的过程,但实际运用中手指的张开闭合是要求非常连贯的,那样才能满足需要。
7)制作机械手由夹紧状态到松开零件的过程。
接着上步的操作将螺纹连杆拖动到使手指张开距离最大的位置,再吧时间码在刚才00:00:15的基础上再向右拖同样的距离到达00:00:30,最后把螺纹连杆拖动到使两手指闭合距离最短处,完成整个动画过程的制作。
该动画的制作将构件的工作情况得到更好地表达,增强了人们对构件的认识和了解。
该软件在工业生产中的应用不但可以提高设计质量,缩短工程周期,还可以节约大量建设投资。
3结论
本文对机械手机构进行设计研究,运用SolidWorks对其结构建模设计,手指夹取物体时的仿真动画。
本次设计充分利用了计算机辅助设计,基于SolidWorks的机械手仿真动画很好地实现预期运动,对系统设计起到很好的效果,提高设计效率。
【参考文献】
[1]苏子昊,孔庆忠.关节型机器人二指平动手爪的设计[J].机械工程与自动化,2008,10.
[2]詹迪维.Solidworks快速入门教程:2009中文版[M].机械工业出版社.[3]云杰漫步多媒体科技CAX设计教研室.Solidworks 2009基础教程[M].清华大学出版社,2009,12.。