基于Solidworks的机械手运动仿真设计
- 格式:pdf
- 大小:557.17 KB
- 文档页数:2
(此文档为word格式,下载后您可任意编辑修改!)毕业设计(论文)Graduation Project (Thesis) for Undergraduate of LSHU 题目基于SolidWorks工业机器人设计TITLE Base SolidWorks Industrial EquipmentHuman Design学院矿业工程学院School School of Mining Engineering 专业班级Major&Class姓名Name指导教师Supervisor论文独创性声明本人所呈交的论文,是在指导教师指导下,独立进行研究和开发工作所取得的成果。
除文中已特别加以注明引用的内容外,论文中不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的工作做出重要贡献的个人和集体,均已在文中以明确方式标明并致谢。
本声明的法律结果由本人承担。
特此声明。
论文作者(签名):摘要在当代所有全自动高智能的制造区域,工业用的机械人本领是在这几十年里发展而来的。
工业机器手是工业机器人的一类,它们是通过自己的手臂和机械结构性能的双方的结合来完成任务的,各种动作是通过编程来实现的特征,尤其是机器人的智力和接受性[1]。
在保证精度情况下,能在多样环境下完成操纵能力,多功能自动定位控制和变化性的控制,能适应多个自由度,不同环境的作业有不同的机器人工作。
本文作为设计对象选择汽车生产线轴锻造搬运的机械手设计,设计了手和身体的各部分设计,机械手采用液压气缸臂驱动,使用SolidWorks软件进行了组装图和零件图的设计,对机械手进行简单的3D造型、爆炸图、动漫。
关键词:SolidWorks;机械手;液压AbstractIn the field of automatic manufacturing, industrial robot technology has been developed here for decades. Industrial robot hand is a kind of industrial robot, which is the completion of their own human and mechanical structure and performance of both sides of the task, for a variety of programming features, especially human intelligence and adaptability. In the case of guaranteed accuracy, the ability to perform manipulation, automation, positioning, control, and change in a variety of environments, the task of delivering jobs in a wide variety of environments with varying degrees of freedom, is something.The manipulator design of automobile production spool handling this draft forging as the design object, the design of each part of the design of hand and body, the mechanical hand adopts hydraulic cylinder arm drive, SolidWorks is used to design the assembly drawing and parts drawing, simple 3D modeling, animation of the manipulator, explosion diagram.Keywords :SolidWorks; Manipulator; Hydraulic pressure目录引言 (1)1总体方案设计 (4)1.1汽车半轴模锻生产线的总体方案 (4)1.2机器人总体方案 (6)2手臂的设计计算 (8)2.1手臂直线运动的驱动力计算 (8)2.1.1手臂水平回转运动驱动力计算 (8)2.1.2手臂竖直升降运动驱动力计算 (11)2.2 手臂上下驱动的力矩计算 (12)2.3液压缸的选择 (13)2.3.1伸缩缸的选择 (13)2.3.2摆动缸的选择 (15)2.4 手臂的结构及装配 (17)2.4.1连接摆动缸 (18)2.4.2安装伸缩缸 (19)2.4.3手臂连接 (20)3机身设计 (22)3.1 机身材料选用 (22)3.2 机身结构设计 (22)3.3 机械定位挡块设计 (24)3.3.1竖直定位挡块 (24)3.3.2水平定位挡块 (25)3.4 机器人装配 (25)4机器人S o l i d W o r k s建模仿真 (27)4.1 SolidWorks软件介绍 (27)4.2 机器人SolidWorks三维建模及装配 (27)4.2.1零件的建模 (27)4.2.2机器人装配 (30)4.3 机器人SolidWorks运动仿真 (31)结论 (34)参考文献 (35)致谢 (36)附录 (37)引言目前在我国民营企业中的汽车行业名列前茅,近些年每个家庭都会拥有汽车导致汽车发展迅速。
基于Solidworks的机械手运动仿真设计0引言机械手对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,更能提高劳动生产率和自动化水平。
随着现代生产的机械化和自动化的发展对机器人的需求越来越大因而对机器人的末端执行机构机械手的研究尤为重要。
一些软件的发展为机械手的设计分析提供了方便降低了生产成本,本设计是基于Solidworks软件,使得设计效率大大提高[1]。
本文是为普通车床配套而设计的上料机械手。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
1机械手工作原理上料机械手直接与工件接触的部件,它能执行人手的抓握功能。
手抓取物体以物体为中心,用两根手指包络物体。
根据抓取物体时的相对状态,靠手指与工件之间的摩擦力来夹持工件。
本上料机械手采用二指平动手爪,属于夹持式手爪,手指由四杆机构带动,当上料机械手手爪夹紧和松开物体时,手指姿态不变,作平动。
机械手手爪的结构见图1,①为支架、②气动杆、③和④为大螺钉、⑤和⑥为三孔连杆、⑦为小螺钉、⑧短连杆、⑨和⑩为手指。
通过气动杆②来传动力的,气缸带动气动杆②使之向上移动时,其它的杆件共同运动,此时手爪是处于握紧工件的过程;反之,当气缸带动气动杆②向下移动时, 手爪是处于张开的过程。
这样,用气缸带动连杆②做往复平动,从而使其它杆件运动,带动手爪张合,手指上的任意一点的运动轨迹为一弧摆动。
图1机械手装配简图2基于Solidworks机械手仿真动画设计2.1Solidworks介绍SolidWorks是一款功能强大的中高端CAD软件,方便快捷是其最大特色。
它有全面的零件实体建模、生成工作机构的分解动画制作和高级动画制作等功能该软件以参数化特征造型为基础,具有功能强大、易学、易用等特点,是当前最优秀的中档三维CAD软件之一。
基于SolidWorks 的新型苹果分类包装机机械手的虚拟设计王启超机电学院学号:092080201043摘要:在SolidWorks2008环境下以新型苹果分类包装机机械手为例,对其进行参数化设计,通过修改相应的特征来完成最终的设计任务。
采取建模方法、装配及检验、生成工程图3 个步骤,论述了虚拟设计的过程,并得出结论:在SolidWorks2008环境下进行虚拟设计,完全符合实际生产中进行的组装过程。
关键词:机械工程;SolidWorks;参数化建模;虚拟设计机械手是模仿人手的动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动机械装置。
机械手能够代替人完成人力所不及或人所不适宜的工作。
随着机械手在各个领域的应用,对其综合性能提出了更高的要求:专业性更强,实用性更高,经济性要求也已经摆到了人们的面前,因此结构简单、操作方便、能满足功能要求又具有一定的可靠性的小型机械手需求量越来越大。
我国从50年代开始搞固定动作机械手(行程开关控制),60年代开始搞数控机械手70年代末开始搞机器人。
工业机器人与智能机器人已进入我国的八.五、九.五科技发展计划及863高技术规划,受到各方而越来越多的重视。
机械手的研究和应用在我国尚属起步阶段,但已显示出许多特殊的优点,展现出了广阔的应用前景。
对于机械手在我国的研究和应用主要有:(1)机械手基础性能的试验以及基础理论研究,解决制造技术存在的问题。
(2)针对笨重、高温、有毒、高粉尘,易燃易爆、单调等恶劣劳动环境,有计划有步骤地推广应用和研制多种机械手,用于铸、锻、焊以及喷漆等工业作业中。
(3)提高机械手精度和运动速度,以适应高生产率和生产节拍的需要。
要研究解决苹果包装抓取搬运机械手的研究机械手的运动速度和缓冲、定位技术。
解决机械手的定型设计、定点、定量生产以及配套件的生产和供应问题,推进机械手设计制造中的现代化(CAD/CAM)、标准化、系列化。
随着工业技术的发展,国内外研制了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
本科毕业论文(设计)基于SolidWorks的液压挖掘机手臂的三维建模及运动仿真毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于Solidworks和VC++的抛光机器手运动仿真研究李晓伟;周宏甫【摘要】Describe an implementation program of based on ZigBee wireless network power supply control system. Implementation to control power supply base onexperimental appointment data, improve the work environment and management efficiencyof the laborator. Solved equipment Laboratory abuse phenomenon in the laboratory.%设计了一种自由曲面抛光的关节型机器手,对其进行了运动学建模.利用几何法简化求逆解过程,并给出了显式的解析解.在Visual studio 2003中应用VC++和MFC编程,计算出空间轨迹的各关节角度.在Adams 2010中完成了机器手的三维实体建模,并运用样条插值的轨迹算法,完成了机器手实现三维空间轨迹的运动学仿真过程,验证了几何法求解和轨迹规划的正确性,以及方案的可行性.【期刊名称】《科学技术与工程》【年(卷),期】2012(012)008【总页数】5页(P1923-1927)【关键词】抛光;逆运动;VC++;样条插值;仿真【作者】李晓伟;周宏甫【作者单位】华南理工大学机械与汽车工程学院,广州510640;华南理工大学机械与汽车工程学院,广州510640【正文语种】中文【中图分类】TP241.2目前,大部分自由曲面最后的研磨、抛光等光整加工过程,仍主要依靠熟练工人手工操作,不仅费时费力,效率低下,而且产品的加工质量和一致性差,精度低。
另外,工业现场的抛光环境比较恶劣,噪声和粉尘严重,影响操作工人的健康。
毕业设计任务书1.设计的主要任务及目标(1)通过使用solidworks软件的机械系统虚拟设计和运动仿真的基本方法,综合运用solidworks的参数化、变量化建模技术以及自上向下的设计思路,完成爬行机器人爬行机构各个零件的虚拟建模并形成装配体,最后进行简单的动画演示。
(2)对运动机构进行仿真分析。
2.设计的基本要求和内容(1)参考资料设计爬行机器人的爬行机构。
(2)使用solidworks软件对爬行机构各个零件实体建模。
(3)使用solidworks软件插入爬行机构的零部件组装成装配体。
(4)对装配体进行动画设计。
(5)对装配体进行仿真分析。
3.主要参考文献[1]刁彦飞.仿蜘蛛爬行机构设计探索[J].《应用科技》.2004年03期[2]倪宁.四足仿生爬行机器人研制[D].南京航空航天大学.2011.12[3]郗向儒.基于SolidWorks的运动仿真研究[D].西安理工大学。
2004.5[4]蒋宗礼,赵钦,肖华,王蕊 .高性能并行爬行器[D].北京工业大学.2006.124.进度安排设计(论文)各阶段名称起止日期1 确定具体选题,开题报告2014.3.01~2014.3.072 收集掌握相关资料2014.3.08~2014.4.203 通过solidworks完成爬行机构的设计2014.4.21~2014.5.214 编写并完善论文2014.5.22~2014.6.015 准备并答辩2014.6.2~2014.6.20基于Solidworks 爬行机器人爬行机构的模型建立及运动仿真摘要:爬行机器人是一种基于仿生学原理研制开发的新型足式机器人。
它采用类拟生物的爬行机构进行运动,自动化程度高,具有丰富的动力学特性。
此外,爬行机器人相比其它机器人具有更多的优点:它可以较易地跨过比较大的障碍(如沟、坎等),对凹凸不平的地形的适应能力更强;因此,爬行机器人的研究已成为机器人学中一个引人注目的研究领域。
本次设计通过使用solidworks软件的机械系统虚拟设计和运动仿真的基本方法,综合运用solidworks的参数化、变量化建模技术以及自上向下的设计思路,完成爬行机器人爬行机构各个零件的虚拟建模并形成装配体,最后进行简单的动画演示。
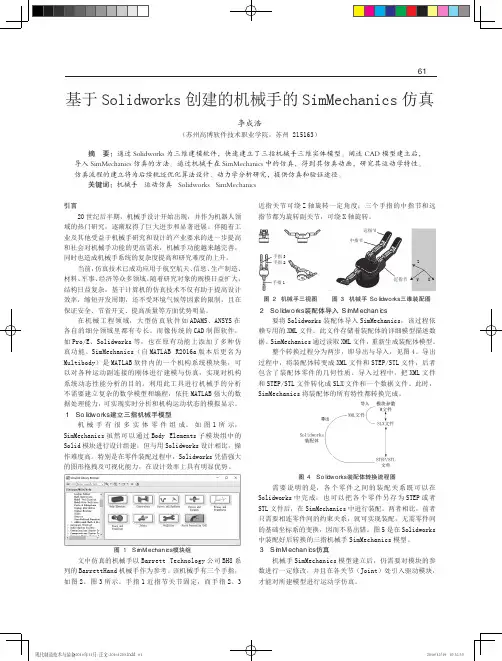
基于Solidworks创建的机械手的SimMechanics仿真
李成浩
【期刊名称】《现代制造技术与装备》
【年(卷),期】2016(000)011
【摘要】通过Solidworks为三维建模软件,快速建立了三指机械手三维实体模型.阐述CAD模型建立后,导入SimMechanics仿真的方法.通过机械手在SimMechanics中的仿真,得到其仿真动画,研究其运动学特性.仿真流程的建立将为后续轨迹优化算法设计、动力学分析研究,提供仿真和验证途径.
【总页数】2页(P61-62)
【作者】李成浩
【作者单位】苏州高博软件技术职业学院,苏州 215163
【正文语种】中文
【相关文献】
1.基于Solidworks & SimMechanics的机构运动分析与仿真 [J], 杨树川;邵金龙;杨术明;朱学军;马伏龙
2.基于SimMechanics的四自由度机械手控制系统机液耦合仿真 [J], 朱琪;吴雁;何玉安
3.基于SolidWorks&SimMechanics对3-UPU并联机器人运动学仿真及控制 [J], 宋马军;陈健伟;张荣兴;朱城伟
4.基于SimMechanics与Virtual Reality的双臂仿真机器人平台创建 [J], 杨博;
张国良;宋海涛
5.基于Solidworks与SimMechanics的刚体动力学联合仿真方法 [J], 韩刚;刘瑞;吕鹤
因版权原因,仅展示原文概要,查看原文内容请购买。
2012年8月第24期
科技视界
SCIENCE &TECHNOLOGY VISION 科技视界0引言
机械手对实现工业生产自动化,推动工业生产的进一步
发展起着重要作用。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,更能提高劳动生产率和自动化水平。
随着现代生产的机械化和自动化的发展对机器人的需求越来越大因而对机器人的末端执行机构机械手的研究尤为重要。
一些软件的发展为机械手的设计分析提供了方便降低了生产成本,本设计是基于S olidworks 软件,使得设计效率大大提高[1]。
本文是为普通车床配套而设计的上料机械手。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
1机械手工作原理
上料机械手直接与工件接触的部件,它能执行人手的抓
握功能。
手抓取物体以物体为中心,用两根手指包络物体。
根据抓取物体时的相对状态,靠手指与工件之间的摩擦力来夹持工件。
本上料机械手采用二指平动手爪,属于夹持式手爪,手指由四杆机构带动,当上料机械手手爪夹紧和松开物体时,
手指姿态不变,作平动。
机械手手爪的结构见图1,①为支架、
②气动杆、③和④为大螺钉、⑤和⑥为三孔连杆、⑦为小螺
钉、⑧短连杆、⑨和⑩为手指。
通过气动杆②来传动力的,气缸带动气动杆②使之向上移动时,其它的杆件共同运动,此时手爪是处于握紧工件的过程;反之,当气缸带动气动杆②向下移动时,手爪是处于张开的过程。
这样,用气缸带动连杆②做往复平动,从而使其它杆件运动,带动手爪张合,手指上的任意一点的运动轨迹为一弧摆动。
图1
机械手装配简图
基于Solidworks的机械手运动仿真设计
郑向华
(成都工业学院机电工程系
四川成都611730)
【摘
要】本文在上料机械手设计与研究的基础上,具体进行了机械手仿真动画设计。
完成基于S olidworks 的机械手运动仿
真,利用仿真动画来描述其工作原理。
设计结果表明该设计可大大提高设计效率,收到良好效果。
【关键词】机械手;运动仿真;Solidworks
The Design of Manipulator ’s Motion Simulation Based on the Solidworks
Z HENG Xiang-hua
(Electromechanical Engineering Department,Chengdu Technological University,Chengdu Sichuan ,611730,China)【Abstract 】In this paper,the design of manipulator on the basis of the design and study,specific for manipulator simulation ani -
mation pleted based on SolidWorks manipulator motion simulation,simulation animation to describe its working principle.The result indicates that this design can greatly improve the design efficiency,received good results.
【Key words 】Manipulator ;M otion simulation ;Solidworks
※基金项目:四川省教育厅项目(基金号10ZC035)。
作者简介:郑向华(1977—),女,黑龙江嫩江人,讲师,硕士研究生毕业,主要从事机电设计、CAD\CAE\CAM 及材料的研究。
项目与课题
17
SCIENCE &TECHNOLOGY VISION
科技视界2012年8月第24期
科技视界
2
基于S olidworks 机械手仿真动画设计
2.1
S olidworks 介绍
SolidWorks 是一款功能强大的中高端CAD 软件,方便快
捷是其最大特色。
它有全面的零件实体建模、生成工作机构的分解动画制作和高级动画制作等功能该软件以参数化特征造型为基础,具有功能强大、易学、易用等特点,是当前最优秀的中档三维CAD 软件之一。
SolidWorks 有全面的零件实体建模、生成工作机构的分
解动画制作和高级动画制作等功能。
工作原理最好的表达方式莫过于动态仿真,因为动态仿真是一种传递工作过程中各组成零件动作情况的良好载体,它的特点就在于形象和直观。
Animator 插件就是一个与Solidworks 完全集成的动画制作软件插件,它能将Solidworks 的三维模型实现动态的可视化,并且实时录制构件的模拟装配过程、模拟拆卸过程和构件的模拟工作过程,将构件的工作情况得到更好地表达,增强了人们对构件的认识和了解。
该软件在工业生产中的应用不但可以提高设计质量,缩短工程周期,还可以节约大量建设投资。
并且,随着信息技术在各领域的迅速渗透,CAD 技术已经得到广泛的应用,从根本上改变了传统的设计、生产、组织模式对推动现有企业的技术改造、带动整个产业结构的变革、发展新型技术、促进经济增长都具有十分重要的意义[2][3]。
2.2机械手仿真动画的建立
1)启动SolidWorks ,选择“文件”→打开机械手装配图,然
后在工具栏中单击Animator ,新建立一个,动画制作界面(如图2所示),设定机械手是通过气动杆来传力给手指;
图2
动画制作界面
2)将机械手气动杆移动到初始位置;将时间滑杆拖到结
束时间;将机械手气动杆移动到最终位置。
完成动画的时间设定;
3)选择主动件螺纹孔连杆,移动它,使两手指闭合到距
离最短处,则设该位置为初始位置;
4)拖动时间码到15秒处即时间滑杆从00:00:00处移动
到00:00:15处;
5)再次选中螺纹连杆,将其拖动到使两手指分开距离最
大处。
此为零件的最终位置;
6)单击动画控制器弹出式工具栏的播放按钮,进行演示。
(其中螺纹连杆的时间线为绿色,其余零件时间线为黄色,因为螺纹连杆是主动件后面的零件为从动件)上面三步使机械手完成一个由张开到闭合的过程,但实际运用中手指的张开闭合是要求非常连贯的,那样才能满足需要。
7)制作机械手由夹紧状态到松开零件的过程。
接着上步的操作将螺纹连杆拖动到使手指张开距离最大的位置,再吧时间码在刚才00:00:15的基础上再向右拖同样的距离到达00:00:30,最后把螺纹连杆拖动到使两手指闭合距离最短处,完成整个动画过程的制作。
该动画的制作将构件的工作情况得到更好地表达,增强了人们对构件的认识和了解。
该软件在工业生产中的应用不但可以提高设计质量,缩短工程周期,还可以节约大量建设投资。
3结论
本文对机械手机构进行设计研究,运用SolidWorks 对其
结构建模设计,手指夹取物体时的仿真动画。
本次设计充分利用了计算机辅助设计,基于SolidWorks 的机械手仿真动画很好地实现预期运动,对系统设计起到很好的效果,提高设计效率。
【参考文献】
[1]苏子昊,孔庆忠.关节型机器人二指平动手爪的设计[J].机械工程与自动化,2008,10.
[2]詹迪维.Solidworks 快速入门教程:2009中文版[M].机械工业出版社.
[3]云杰漫步多媒体科技CAX 设计教研室.Solidworks 2009基础教程
[M].清华大学出版社,2009,12.
[责任编辑:王静]
S
项目与课题
18。