可逆直流调速系统——辅导材料
- 格式:doc
- 大小:1.42 MB
- 文档页数:11


第 四 章 可逆直流调速系统 第一节 可逆运行的基本知识【教学目标】1.知识目标:了解可逆线路接线形式及各自优缺点,掌握可逆运行中电机的四种工作状态, 2.能力目标:能够分析可逆运行的电路。
3.情感目标:激发学生浓厚的学习兴趣,培养学生严谨的科学态度,锻炼实际分析能力。
【教学重点】 可逆拖动的工作状态【教学难点】 可逆拖动工作状态中的逆变状态。
【教学方法】 读书指导法、分析法、演示法、练习法。
【课时安排】 2课时(90分钟)。
【教学过程】 复习导入:问题的提出:有许多生产机械要求电动机既能正转,又能反转,而且常常还需要快速地起动和制动,这就需要电力拖动系统具有可逆的调速系统。
新课:一. 可逆直流调速电路的几种形式只有改变电磁转矩的方向,才能改变转速的方向。
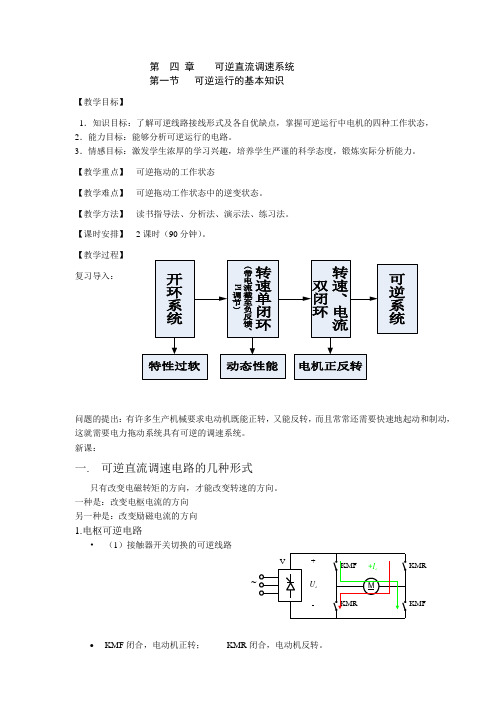
一种是:改变电枢电流的方向 另一种是:改变励磁电流的方向1.电枢可逆电路• (1)接触器开关切换的可逆线路• KMF 闭合,电动机正转; KMR 闭合,电动机反转。
~KMF KMR(2)晶闸管开关切换的可逆线路• VT1、VT4导通,电动机正转; VT2、VT3导通,电动机反转。
(3)两组晶闸管装置反并联可逆线路电动机正转时,由正组晶闸管装置VF 供电;反转时,由反组晶闸管装置VR 供电。
两组晶闸管分别由两套触发装置控制,都能灵活地控制电动机的起、制动和升、降速。
但是,不允许让两组晶闸管同时处于整流状态,否则将造成电源短路,因此对控制电路提出了严格的要求。
各种切换线路的比较• 接触器切换线路——适用于不经常正反转的生产机械; • 晶闸管开关切换线路——适用于中、小功率的可逆系统; • 两组晶闸管反并联线路——适用于各种可逆系统。
2. 励磁可逆线路改变励磁电流的方向也能使电动机改变转向。
与电枢反接可逆线路一样,可以采用接触器开关或晶闸管开关切换方式,也可采用两组晶闸管反并联供电方式来改变励磁方向。
励磁反接的特点:优点:供电装置功率小。
可逆直流电动机调速系统一、电路的组成和工作原理H型双极性PWM 变换器主要由脉宽调制器UPM、逻辑延时环节DLD、栅极驱动电路GD 和四个功率场效应晶体管MOSFET 构成的H 型PWM 变换电路构成,电路原理框图见图1-1。
其中脉宽调制器UPW 是可以由专用集成电路SG3525组成的。
SG3525 是一种运用于直流PWM 调速系统控制电路的专用集成电路芯片。
由它产生频率灵活可变的方波脉冲调制信号,改变Vg即可改变其输出方波信号脉冲的宽度。
信号经逻辑延时单元DLD 后,通过隔离驱动电路GD(IR2110),控制PWM 电路的四个MOSFET(IRF840)VT1、VT2、VT3、VT4 的通断,产生脉冲宽度可以调节的直流PWM 波形供给负载,改变U g,即可改变负载两端电压波形的占空比,从而改变负载上的平均电压U d。
图1-1电路原理框图插上电源插头,合上自动开关。
用万用表量测低压直流电源是否为±15V左右。
确认正常后再进行以下实验步骤。
二、SG3525性能测试:按下S1琴键开关,(1)用示波器观察UPW的“1”端的电压波形,记录波形的周期、幅度。
(2)用示波器观察UPW的“2”端的电压波形,调节UPW的RP电位器,使方波的占空比为50%。
(3)用导线将NMCL-31A的“G”的“1”和“UPW”的“3”相连,分别调节正负给定,记录“2”端输出波形的最大占空比和最小占空比。
2.控制电路的测试(1)逻辑延时时间的测试在上述实验的基础上,分别将正、负给定均调到零,连接UPW的“2”端和DLD的“1”端,用示波器观察“DLD”的“1”和“2”端的输出波形,并记录延时时间td=(2)同一桥臂上下管子驱动信号列区时间测试分别将“隔离驱动”的G和主回路的G相连,用双踪示波器分别测量VVT1.GS 和VVT2.GS以及VVT3.GS和VVT4.GS的死区时间:tdVT1.VT2=tdVT3.VT4=3.PWM 主电路的测试PWM 主电路由三相不控整流桥和H 型PWM 电路组成。
在上述实验的基础上,可以进行主电路的测试。
先断开自动开关,将三相交流电源输出的U、V、W 端与PWM 单元的U、V、W 端连接,连续PWM 单元的“1”端和“3”端,在PWM 的“6”端和“7”串联一直流电流表和滑线变阻器(注意!一定要将滑线变阻器的阻值调到最大)。
合上自动开关,按下闭合按钮。
(1) 用直流电压表(或万用表)量测PWM 单元“1”和“2”的电压值并记录。
(2) 用示波器观察“1”、“2”两端的电压波形并记录。
(3) 当Vg为零时,用示波器观察负载电阻上的电压波形。
(4) G 单元开关S1 扳向上正给定,调节RP1,用示波器观察负载电阻上电压波形,并用万用表(或直流电压表)量测负载上电压的数值。
(5) G 单元S1 开关扳向负给定,调节RP2,重复(4)内容。
三、系统参数的测定1.PWM 直流电动机系统主电路总电阻R 和电枢电阻Ra 的测定。
主电路总电阻R 包括直流电动机的电枢电阻Ra 和PWM 变换电路的内阻R rec,即R = R a + R rec测定元部件的电阻时,由于其阻值较小,若用欧姆表或电桥测量,因是小电流检测,接触电阻的影响很大,因此一般采用直流伏安法,即采用伏安比较法来测定电阻,实验线路如图1-2 所示(只画主电路部分)。
图1-2 PWM 直流电动机系统主电路(1) 在被测系统中的主电路中串入滑线变阻器,并将其调至最大值,电动机不加励磁,使电动机堵转。
给定电位器RP1 和RP2 均调至零,使G 单元输出Vg 电压为零。
连接隔离及驱动电路的G 与PWM 的G。
连接主电路,按下主电路电源按钮(闭合钮)。
(2) 调整RP1或RP2给定电压,使主电路“6“、”7“端间的U d = (30~70)%U N ,(用万用表量测)。
然后调整滑线变阻器RP,使直流电流表的电流(即主电路电流)为(80~90)%I N。
读取直流电流表 A 和直流电压表V 的读数并记录。
设为I1和U1。
则此时PWM 变换器的理想定载电压为U d0 = I1R + U1(3) 调节滑线变阻器RP,使电流表A 的读数为40%I N,在理想定载电压U d0近似不变的前提下,读取并记录此时A 和V 的数值,设为I2和U2,则有U d0 = I2R + U2由以上两式中消去U d0,即可得主电路总电阻RR=(U2-U1)/(I1-I2);为减小由于非线性和接触电阻等原因造成的误差,可以改变给定电压Vg 而使“6”、“7”间电压改变,重复上述实验,然后求取平均值。
(4) 将电动机电枢两端短接,重复上述(2)、(3)实验,可测得PWM 变换电路的内阻,也可多做几组求取平均值。
电动机电枢电阻Ra 则可由下式求得R a = R -R rec2.PWM 电动机系统主电路总电感L 的测定主电路总电感包括电动机的电枢电感L a 和隔离变压器漏感L TR ,但因L TR 之值很小,可略去不计,因此主电路的总电感L 就是电动机电枢电感La ,即L = La测量电感的数值可以用交流伏安法,为了接近实验情况,测量时电动机需要加励磁,并使电动机处于堵转状态。
测量时的实验线路如图1-3 所示。
直流电动机串联滑线电阻器后接在交流电源相电压(U 、N)上,将直流励磁电源输出接直流电动机励磁绕组。
按下主电源闭合按钮,保持直流电动机在堵转状态。
图1-3 实验线路图(1) 调节滑线变阻器RP ,使电动机电枢两端交流电压的有效值为(30~70)%U N ,用交流电压表V 和交流电流表A 分别测出通入交流电后电枢两端的电压值Ua 和电枢中流过的电流I ,由此可以得到交流阻抗Za :Za = Ua/I ,并计算出电枢电感La: )2(22f R Z L a aa π-=,式中f 为电网电压频率,一般f = 50HZ 。
(2) 调节RP ,改变电枢两端的电压值,重复上述实验,做几组,求其平均值。
3.测定PWM 直流电动机系统主电路电磁时间常数T l 。
求取PWM 直流电动机系统主电路电磁时间常数T l 可以有不同的方法,可以采用计算法和电流波形法。
(1) 计算法根据1、2 实测的主电路电阻和电感直接计算电磁时间常数T l 。
主电路电磁时间常数有:电动机电枢电磁时间常数为: (2) 电流波形法按图1-2 连接系统,接上控制电路给定Vg(Vg 接UPM 的“3”端、滑线变阻器为零),连接交流电源,调节给定电压Vg 使电流表读数至电流Id=(50~90)I N 。
保持Vg 不变,利用G 单元开关S2 实现突加给定电压Vg ,利用慢扫描示波器观察并记录电流变化波形(PWM 单元的“5”、“6”端电压波形)。
利用波形i d (t) 指数变化曲线,测量计算出电流上升到稳态值的63.2%的时间,即为主电路电磁时间常数T l 的值。
取几个不同的稳态电流值,求T l 的平均值。
4.测定直流电机机组的飞轮惯量GD 2。
电力拖动系统的运动方程式为dt dn GD T T L e /)375/(2⨯=-式中, T e —电动机的电磁转矩,N·m ;T L —负载转矩,N·m(空载时即为空载转矩T L0);n —电动机转速,r/min ;GD 2—电力拖动系统机组的飞轮惯量N·m 2。
电动机空载自由停车时(T e =0、T L =T L0)的dn/d t 就可以求得机组的飞轮惯量GD 2。
dt dn GD T L /)375/(2⨯-=,)//(37502dt dn T GD L ⨯=(1) 电动机组的空载转矩T L0 可通过测定电动机在不同转速n 下的电枢电压U a 和空载电流I 0,并通过计算电动机的空载损耗P 0 得到,即n P T L /55.900=,R I I U P a 2000-=测定时,电动机须加额定励磁,实验线路的主电路部分如图1-4 所示。
图1-4 实验线路的主电路图(2) dn/dt 值可由自由停车时测得的曲线n=f (t)求得。
按照图1-4 线路接线,G 单元“U g”接PWM 的“3”并将G 单元的RP1 和RP2 调到零。
连接主电路电源线,在PWM 单元的“6”、“7”之间按图1-4 连接电动机电枢及测量仪表,电动机加额定励磁,将机组上的转速输出接FBS 单元的“1”、“2”,将该单元的RP 调至中间区域。
(3) 合上自动开关,按下主电源“闭合”按钮,调节Ug ,使电动机空载起动到某一稳定转速(一般取电动机的额定转速n N ),测量并记录此时的电枢电压Ua 、空载电流I 0 和转速n 。
突然断开给定电压(将G 单元的开关S2下扳),用慢扫描示波器观察并记录自由停车的转速下降曲线n=f (t),即可求取某一转速时的空载转矩和dn/dt 。
由于空载转矩不是常数,可以以转速n 为基准,选择若干个点,求出相应于某一转速n 时的T L0 及dn/dt 值,以求得GD 2 的平均值。
5.测定直流电动机的电势系数C e 和转矩系数C m 。
通常电动机的电动转速比C e 可以利用下面公式直接由电动机的已知参数求得,即但是,式中的U N 、I N 、n N ,是电动机铭牌上直接给出的,而电枢电阻Ra 并不直接给出,而是实测求得。
为了避免由于电枢电阻Ra 测量误差的影响,可以改用测定空载损耗时的数据,对应所选择的转速区段,求得电动机在额定磁通下的电动势转速比C e,即将电动机加额定励磁,使其空载运行,改变电枢电压U d,测得相应的n,即可由下式算出C eCe=Ke =(U d2-U d1)/(n2-n1)式中,Ce的单位为V/(r/min),分别取几点,求取C e的平均值。
额定磁通下,电动机的转矩电流比可利用下式直接求取,即C e≈ 9.55C m6.测定PWM 直流电动机系统的机电时间常数T m系统的机电时间常数T m可利用上面测定的电动机参数由公式直接计算求得,即由于通常电动机系统的机电时间常数T m远大于其电磁时间常数,即T m>>T l,因此可以把PWM 直流电动机系统的电动机部分由二阶环节近似看成一阶惯性环节,即当T m>>T l时存在当电动机电枢突加电压U d时,转速n将按指数规律上升。
因此,可以利用图1-4 线路,突然给电动机电枢加电压(即突然合上G 单元的开关S2),用慢扫描示波器观察并记录转速上升曲线n=f(t),转速n到达63.2%稳态转速所经过的时间即可以认为是PWM 电动机系统的机电时间常数T m。
7.测定PWM 变换器输入输出控制特性U d=f(U c) 和测速发电机转速变换特性U TG = f(n) 。
实验线路如图1-4 所示,电动机加额定励磁。
逐渐增加UPW 单元的给定电压Ug(接在UPW 单元的“3”端),分别用万表读取Ug、U TG,用直流电压表(或万用表)读取U d,用数字测速计读取n,记录下若干组数据,即可描绘出特性曲线U d=f(Uc)和U TG=f(n)。