自动控制原理与系统第四章 分析自动控制系统性能常用方法
- 格式:pptx
- 大小:6.96 MB
- 文档页数:110
第4章 根 轨 迹 法根轨迹法是分析和设计线性控制系统的图解方法,使用简便,在控制工程上得到了广泛应用。
本章首先介绍根轨迹的基本概念,然后重点介绍根轨迹绘制的基本法则,在此基础上,进一步讨论广义根轨迹的问题,最后介绍控制系统的根轨迹分析方法。
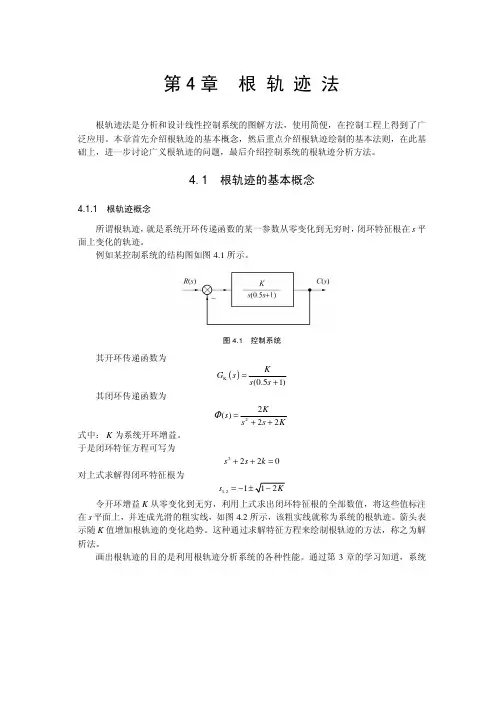
4.1 根轨迹的基本概念4.1.1 根轨迹概念所谓根轨迹,就是系统开环传递函数的某一参数从零变化到无穷时,闭环特征根在s 平面上变化的轨迹。
例如某控制系统的结构图如图4.1所示。
图4.1 控制系统其开环传递函数为()K (0.51)KG s s s =+其闭环传递函数为22()22Ks s s KΦ=++式中:K 为系统开环增益。
于是闭环特征方程可写为2220s s k ++=对上式求解得闭环特征根为1,21s =−令开环增益K 从零变化到无穷,利用上式求出闭环特征根的全部数值,将这些值标注在s 平面上,并连成光滑的粗实线,如图4.2所示,该粗实线就称为系统的根轨迹。
箭头表示随K 值增加根轨迹的变化趋势。
这种通过求解特征方程来绘制根轨迹的方法,称之为解析法。
画出根轨迹的目的是利用根轨迹分析系统的各种性能。
通过第3章的学习知道,系统第4章 根轨迹法·101··101·特征根的分布与系统的稳定性、暂态性能密切相关,而根轨迹正是直观反应了特征根在复平面的位置以及变化情况,所以利用根轨迹很容易了解系统的稳定性和暂态性能。
又因为根轨迹上的任何一点都有与之对应的开环增益值,而开环增益与稳态误差成反比,因而通过根轨迹也可以确定出系统的稳态精度。
可以看出,根轨迹与系统性能之间有着比较密切的联系。
图4.2 控制系统根轨迹4.1.2 根轨迹方程对于高阶系统,求解特征方程是很困难的,因此采用解析法绘制根轨迹只适用于较简单的低阶系统。
而高阶系统根轨迹的绘制是根据已知的开环零、极点位置,采用图解的方法来实现的。
下面给出图解法绘制根轨迹的根轨迹方程。
自动控制系统的控制方式及性能指标自动控制系统是一种通过传感器、执行器和控制器等组成的复杂系统,可以对特定过程或设备进行自动化控制。
控制方式和性能指标是评价一个自动控制系统优劣的重要标准。
本文将介绍常见的自动控制系统的控制方式及其相关的性能指标。
一、开环控制开环控制是最简单的控制方式之一,它是指控制器对被控对象进行控制,但没有反馈信号参与。
开环控制系统主要通过既定的控制算法对被控对象输出信号进行调节。
这种控制方式无法对系统的实际状态进行准确的监测和调节,因此容易受到外界干扰的影响,导致输出信号与期望值之间存在偏差。
二、闭环控制闭环控制是一种基于反馈信号的控制方式,它通过传感器获取系统的实际状态信息,并将该信息传递给控制器进行实时调节。
闭环控制可以确保被控对象的输出信号与期望值之间的误差最小化。
这种控制方式具有较好的稳定性和鲁棒性,能够在系统出现扰动或参数变化时自动调整输出信号,使系统保持稳定运行。
闭环控制的性能指标主要包括以下几个方面:1. 响应时间:响应时间是指系统从受到输入信号到输出信号达到稳定状态所需的时间。
响应时间越短,系统的动态性能越好。
2. 稳定性:稳定性是指系统在受到扰动或参数变化时,能够保持输出信号在允许范围内波动较小的特性。
稳定性越好,系统的控制效果越优秀。
3. 误差指标:误差指标是评价闭环控制系统控制精度的重要指标。
常用的误差指标有稳态误差、峰值误差和超调量等,这些指标可以量化地反映系统输出信号与期望值之间的偏差程度。
4. 鲁棒性:鲁棒性是指系统对参数变化和外界干扰的适应能力。
一个鲁棒性较强的控制系统能够在参数变化或干扰较大的情况下仍能保持较好的控制效果。
5. 控制精度:控制精度是指系统输出信号与期望值之间的精度程度。
控制精度越高,系统的控制能力越强。
综上所述,自动控制系统的控制方式及性能指标是评价系统优劣的重要指标。
开环控制和闭环控制是常见的控制方式,而响应时间、稳定性、误差指标、鲁棒性和控制精度等性能指标可以客观评价系统的控制效果。
一.名词解释1、传递函数:传递函数是指在零初始条件下,系统输出量的拉式变换与系统输入量的拉式变换之比。
2、系统校正:为了使系统达到我们的要求,给系统加入特定的环节,使系统达到我们的要求,这个过程叫系统校正。
3、主导极点:如果系统闭环极点中有一个极点或一对复数极点据虚轴最近且附近没有其他闭环零点,则它在响应中起主导作用称为主导极点。
4、香农定理:要求离散频谱各分量不出现重叠,即要求采样角频率满足如下关系: ωs ≥2ωmax 。
5、状态转移矩阵:()At t e φ=,描述系统从某一初始时刻向任一时刻的转移。
6、峰值时间:系统输出超过稳态值达到第一个峰值所需的时间为峰值时间。
7、动态结构图:把系统中所有环节或元件的传递函数填在系统原理方块图的方块中,并把相应的输入、输出信号分别以拉氏变换来表示,从而得到的传递函数方块图就称为动态结构图。
8、根轨迹的渐近线:当开环极点数 n 大于开环零点数 m 时,系统有n-m 条根轨迹终止于 S 平面的无穷远处,且它们交于实轴上的一点,这 n-m 条根轨迹变化趋向的直线叫做根轨迹的渐近线。
9、脉冲传递函数:零初始条件下,输出离散时间信号的z 变换()C z 与输入离散信号的z 变换()R z 之比,即()()()C z G z R z =。
10、Nyquist 判据(或奈氏判据):当ω由-∞变化到+∞时, Nyquist 曲线(极坐标图)逆时针包围(-1,j0)点的圈数N ,等于系统G(s)H(s)位于s 右半平面的极点数P ,即N=P ,则闭环系统稳定;否则(N ≠P )闭环系统不稳定,且闭环系统位于s 右半平面的极点数Z 为:Z=∣P-N ∣11、程序控制系统: 输入信号是一个已知的函数,系统的控制过程按预定的程序进行,要求被控量能迅速准确地复现输入,这样的自动控制系统称为程序控制系统12、稳态误差:对单位负反馈系统,当时间t 趋于无穷大时,系统对输入信号响应的实际值与期望值(即输入量)之差的极限值,称为稳态误差,它反映系统复现输入信号的(稳态)精度。
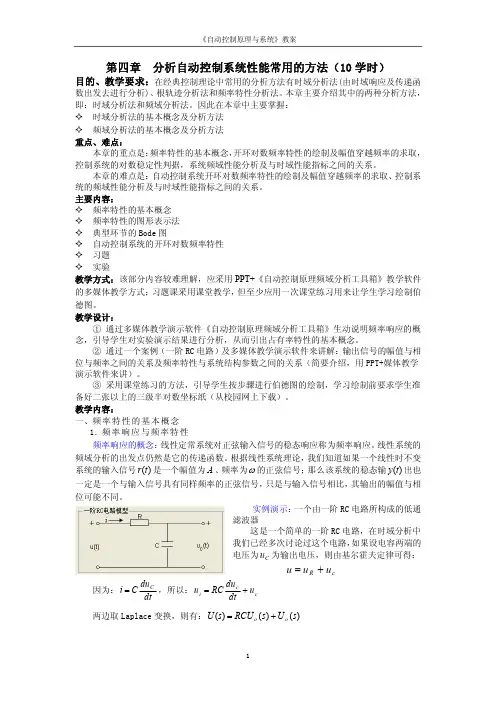
第四章 分析自动控制系统性能常用的方法(10 学时)目的、教学要求:在经典控制理论中常用的分析方法有时域分析法(由时域响应及传递函 数出发去进行分析)、根轨迹分析法和频率特性分析法。
本章主要介绍其中的两种分析方法, 即:时域分析法和频域分析法。
因此在本章中主要掌握:² 时域分析法的基本概念及分析方法² 频域分析法的基本概念及分析方法重点、难点:本章的重点是: 频率特性的基本概念, 开环对数频率特性的绘制及幅值穿越频率的求取, 控制系统的对数稳定性判据,系统频域性能分析及与时域性能指标之间的关系。
本章的难点是:自动控制系统开环对数频率特性的绘制及幅值穿越频率的求取、控制系 统的频域性能分析及与时域性能指标之间的关系。
主要内容:² 频率特性的基本概念² 频率特性的图形表示法² 典型环节的 Bode 图² 自动控制系统的开环对数频率特性² 习题² 实验教学方式:该部分内容较难理解,应采用 PPT+《自动控制原理频域分析工具箱》教学软件 的多媒体教学方式;习题课采用课堂教学, 但至少应用一次课堂练习用来让学生学习绘制伯 德图。
教学设计:① 通过多媒体教学演示软件《自动控制原理频域分析工具箱》生动说明频率响应的概 念,引导学生对实验演示结果进行分析,从而引出占有率特性的基本概念。
② 通过一个案例(一阶 RC 电路)及多媒体教学演示软件来讲解:输出信号的幅值与相 位与频率之间的关系及频率特性与系统结构参数之间的关系(简要介绍,用 PPT+媒体教学 演示软件来讲)。
③ 采用课堂练习的方法,引导学生按步骤进行伯德图的绘制,学习绘制前要求学生准 备好二张以上的三级半对数坐标纸(从校园网上下载)。
教学内容:一、频率特性的基本概念1. 频率响应与频率特性频率响应的概念:线性定常系统对正弦输入信号的稳态响应称为频率响应。
线性系统的 频域分析的出发点仍然是它的传递函数。