传感器温度误差补偿的软件实现
- 格式:pdf
- 大小:139.43 KB
- 文档页数:2
python 温度补偿算法全文共四篇示例,供读者参考第一篇示例:Python温度补偿算法是一种用于校正传感器测量温度误差的算法。
在很多实际应用中,传感器测量的温度值会受到环境温度的影响,导致测量结果不准确。
为了解决这个问题,我们可以使用温度补偿算法来消除测量误差,提高温度测量的准确性。
温度补偿算法的原理基于传感器的工作特性和环境温度的影响。
传感器在不同温度下的输出会有不同的偏差,因此需要根据环境温度的变化来调整传感器测量结果。
一般来说,传感器的温度补偿算法可以分为线性补偿和非线性补偿两种类型。
线性补偿算法是指根据传感器在不同温度下的输出值和真实温度之间的线性关系进行校准。
这种算法通常通过测量传感器在不同温度下的输出值,然后根据线性插值的方法来算出传感器的实际输出值。
这种方法简单易行,但不能完全消除所有的温度误差。
非线性补偿算法则通过建立传感器输出值与真实温度之间的非线性关系,来更准确地补偿温度误差。
这种算法一般需要事先收集大量的数据,然后使用机器学习或数学模型来拟合出传感器的非线性特性,从而实现更准确的温度补偿。
在Python中,我们可以使用各种库和工具来实现温度补偿算法。
numpy库可以用来进行数据处理和插值运算,scikit-learn库可以用来进行机器学习建模,matplotlib库可以用来绘制图表来展示温度补偿效果等。
下面我们来介绍一个简单的温度补偿算法示例,使用线性插值的方法来实现传感器的温度校正。
我们需要收集传感器在不同环境温度下的输出值和真实温度,建立一个温度补偿表。
然后,我们可以编写一个Python函数来实现温度补偿的计算,具体代码如下:```pythonimport numpy as np# 温度补偿表temp_compensation_table = {0: 1.0,10: 0.98,20: 0.95,30: 0.92,40: 0.88}def temperature_compensation(temperature,sensor_output):# 线性插值keys = sorted(temp_compensation_table.keys())if temperature <= keys[0]:return sensor_output *temp_compensation_table[keys[0]]if temperature >= keys[-1]:return sensor_output *temp_compensation_table[keys[-1]]for i in range(1, len(keys)):if temperature < keys[i]:x0, x1 = keys[i-1], keys[i]y0, y1 = temp_compensation_table[x0],temp_compensation_table[x1]return sensor_output * (y0 + ((temperature - x0) / (x1 - x0)) * (y1 - y0))# 测试temperature = 25sensor_output = 100compensated_output =temperature_compensation(temperature, sensor_output) print(f"补偿后的输出值为: {compensated_output}")```在这段代码中,我们定义了一个温度补偿表`temp_compensation_table`,包含了在不同温度下的传感器输出的修正系数。
传感器零点温度漂移补偿方法研究现状综述我们把传感器在额定电压下,未受输入信号时的输出(一般为电压值)称为传感器的“零点”。
零点输出的企业标准一般控制在满量程输出电压的百分之一。
我们又把传感器零点随时间不断变化的现象,称为传感器的“零点漂移”[1]。
传感器广泛应用于各种工农业生产实践中,一切科学研究和生产过程要获取信息都要通过其转换为易传输与处理的电信号。
但大多数传感器的敏感元件采用金属或半导体材料,其静态特性与环境温度有着密切联系。
实际工作中由于传感器的工作环境温度变化较大,又由于温度变化引起传感器的热输出较大,将会带来较大的测量误差;同时,温度变化影响零点大小,继而影响到传感器的静态特性,所以必须采取措施以减少或消除温度变化带来的影响,即必须进行零点温度补偿。
一、零漂产生原因传感器零点产生漂移的原因很多。
如对压力传感器来说,桥路中元件参数本身就不对称;弹性元件和电阻应变计的敏感栅材料温度系数,线胀系数不同,组桥引线长度不一致等综合因素,最后导致传感器组成电桥后相邻臂总体温度系数有一定差异,当温度变化时,相邻臂电阻变化量不同,从而使电桥产生输出不平衡,即产生了零点漂移[2];对智能传感器,时漂——即对系统而言,随着时间的增加,相当于对系统进行老化处理,这样,系统的结构特征就要发生变化,从而产生漂移。
温漂——受温度影响而引起的零点不稳定[3]。
可见,温度的影响是产生零点漂移的最主要因素,也是最难控制的。
以压力传感器零点温度漂移为例,零点温度漂移是衡量压力传感器质量的一个重要性能指标,一般零点温度漂移系数用K 0来表示:C FS T U T U T T T U T U K N ︒⨯---=/%100)]()()[()()(00000000 (1) 上式中,)(0T U N 为参考温度下满量程时的输出电压;)(0T U 和)(00T U 分别为温度T 和参考温度T 0时的零点输出电压。
由于热敏电阻制造工艺的不一致性,温度零点漂移系数K 0不是一个定值,它在不同的温度区间有不同的值。
一种硅压阻式压力传感器温度补偿算法及软件实现-基础电子摘要:硅压阻式压力传感器的零点温度漂移和灵敏度温度漂移是影响传感器性能的主要因素之一,如何能使该类误差得到有效补偿对于提高其性能很有意义。
通过对硅压阻式压力传感器建立高阶温度补偿模型进行温度误差补偿是一种有效的方法,并在该模型基础上给出了拟合系数计算方法,并用Matlab GUI 软件来实现温度补偿系数计算,进而实现传感器输出的动态温补,达到了很好的输出线性性。
实验结果表明,补偿后传感器输出的非线性误差小于0.5% F.S.0 引言硅压阻式压力传感器利用半导体材料的压阻效应来进行压力测量,以其体积小、灵敏度高、工艺成熟等优点,在各行业中得到了广泛应用。
实际工程应用中由于硅材料受温度的影响,导致零点漂移和灵敏度漂移,因此温度补偿问题是提高传感器性能的一个关键环节。
目前压力传感器主要有两种温度补偿方法:硬件补偿和软件补偿。
硬件补偿方法存在调试困难、精度低、成本高、通用性差等缺点,不利于工程实际应用;利用数字信号处理技术的软件补偿能够克服以上缺点,也逐渐成为研究热点。
目前软件补偿的方法主要有:查表法、二元插值法、BP神经网络法、小波神经网络方法、曲线曲面拟合方法等。
查表法需要占用很大内存空间,而神经网络方法存在网络不稳定、训练时间较长的缺点不利于工程应用。
在研究各类软件补偿方法的基础上对压力传感器采用建立高阶温度补偿模型进行温度误差补偿,并且在Matlab GUI软件平台下实现高阶温度补偿系数的计算,通过实验对该方法进行验证。
1 高阶温度补偿模型的建立1.1 高阶温度补偿建模压力传感器输出非线性误差主要是由零点温度漂移和灵敏度温度漂移产生,零点温度漂移是由于电阻掺杂不同而导致电阻的温度系数不同,灵敏度温度漂移主要由于压阻系数易随温度的升高而减少。
针对温度对传感器输出影响,采用对零点温度漂移和灵敏度漂移建立高阶补偿模型进行统一补偿,补偿后压力值Press(T )表示为温度传感器电压输出VT 和压力传感器电压输出VP 的函数:将Press(T )补偿转换成曲面拟合问题,采用高阶多项式拟合方法构造曲面方程:式中系数矩阵中元素CI,J 是式(2)中VP VT 项对应系数。
克服温度传感器测量滞后误差的动态补偿算法
刘清
【期刊名称】《电气自动化》
【年(卷),期】2004(26)6
【摘要】由于温度传感器的测量滞后,导致温度控制系统中的实际被控温度存在较大超调.本文提出了一种基于遗传神经元网络补偿的动态测量方法,该方法利用遗传神经元网络的快速逼近能力,建立传感器的动态逆模型,实现对传感器动态测量的补偿.此方法设计的动态补偿器具有不依赖传感器模型,鲁棒性强等特点,检测信号经补偿计算后,能够克服传感器的测量滞后,实验证明了该方法的有效性.
【总页数】3页(P59-61)
【作者】刘清
【作者单位】南京师范大学计算机科学系,南京,210042
【正文语种】中文
【中图分类】TP212
【相关文献】
1.温度传感器测量滞后误差的动态逆模型补偿方法 [J], 刘清;曹国华
2.克服温度传感器测量滞后的预测补偿算法 [J], 曹玉强
3.模型参考和误差白化的传感器动态补偿算法 [J], 刘清;曹国华
4.图像预测误差域的动态补偿安全隐写算法 [J], 张湛;刘光杰;王俊文;戴跃伟;王执铨
5.用于光收发模块热性能测试温度传感器测量误差分析 [J], 姜展翔;杨明冬;宋蓓莉;全本庆
因版权原因,仅展示原文概要,查看原文内容请购买。
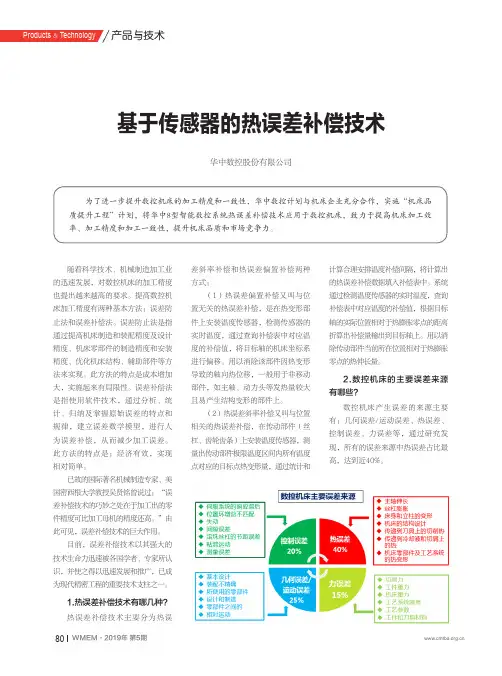
产品与技术华中数控股份有限公司基于传感器的热误差补偿技术为了进一步提升数控机床的加工精度和一致性,华中数控计划与机床企业充分合作,实施“机床品质提升工程”计划,将华中8型智能数控系统热误差补偿技术应用于数控机床,致力于提高机床加工效率、加工精度和加工一致性,提升机床品质和市场竞争力。
随着科学技术、机械制造加工业的迅速发展,对数控机床的加工精度也提出越来越高的要求。
提高数控机床加工精度有两种基本方法:误差防止法和误差补偿法。
误差防止法是指通过提高机床制造和装配精度及设计精度、机床零部件的制造精度和安装精度、优化机床结构、辅助部件等方法来实现。
此方法的特点是成本增加大,实施起来有局限性。
误差补偿法是指使用软件技术,通过分析、统计、归纳及掌握原始误差的特点和规律,建立误差数学模型,进行人为误差补偿,从而减少加工误差。
此方法的特点是:经济有效,实现相对简单。
已故的国际著名机械制造专家、美国密西根大学教授吴贤铭曾说过:“误差补偿技术的巧妙之处在于加工出的零件精度可比加工母机的精度还高。
”由此可见,误差补偿技术的巨大作用。
目前,误差补偿技术以其强大的技术生命力迅速被各国学者、专家所认识,并使之得以迅速发展和推广,已成为现代精密工程的重要技术支柱之一。
1.热误差补偿技术有哪几种?热误差补偿技术主要分为热误差斜率补偿和热误差偏置补偿两种方式:(1)热误差偏置补偿又叫与位置无关的热误差补偿,是在热变形部件上安装温度传感器,检测传感器的实时温度,通过查询补偿表中对应温度的补偿值,将目标轴的机床坐标系进行偏移。
用以消除该部件因热变形导致的轴向热位移,一般用于非移动部件,如主轴、动力头等发热量较大且易产生结构变形的部件上。
(2)热误差斜率补偿又叫与位置相关的热误差补偿,在传动部件(丝杠、齿轮齿条)上安装温度传感器,测量出传动部件极限温度区间内所有温度点对应的目标点热变形量,通过统计和计算合理安排温度补偿间隔,将计算出的热误差补偿数据填入补偿表中。
井下工具中位移传感器温度补偿方法黄 敏1,冯 强1,张 恒1,雷中清1,杨文领1,刘 洋1,杜 磊2(1.中国石油渤海钻探工程技术研究院;2.中国石油渤海钻探第二固井公司,天津 300280) 摘 要:为了消除高温环境下井下工具中位移传感器温度漂移对测量精度的影响,提出了一种基于BP神经网络的位移传感器温度补偿方法,由LabVIEW编程语言进行算法实现,设计测试电路、通过非等间距温度采样记录位移传感器在不同温度下的漂移量,由BP神经网络模型进行温度补偿。
通过仿真试验验证,该方法将高温环境下位移传感器的输出误差最大值由补偿前的4.5%降低到0.6%以下,有效地提高了位移传感器的测量精度,满足了井下工具的应用需求。
关键词:井下工具;位移传感器;温度补偿;BP神经网络;LabVIEW 中图分类号:TE31 文献标识码:A 文章编号:1006—7981(2019)02—0033—04 在井下工具的智能化应用中,目标工具的开启与闭合,通过接收地面传输的控制指令实现,要检测其开启状态并控制其开启程度,需在目标工具中安装单片机和位移传感器等电子设备。
由于井下环境恶劣,位移传感器通常需要在高温状态下持续工作,导致其输出存在较大的温度漂移,为了提高位移位置的精确控制,需要采用温度补偿方法对传感器输出进行校正[1]。
人工神经网络是人们模仿人的神经系统处理信息功能的一个智能化系统,具有良好的非线性映射能力,通常用于解决模式识别、数据预测和数据拟合等各个领域。
本文针对井下工具位移传感器存在的温度漂移问题,建立基于BP神经网络的温漂补偿模型,通过设定非等间距温度采样间隔,在同一温度下对位移传感器的位移和输出电压进行多点采样,由Lab-VIEW软件编程实现采样数据的处理,通过模拟仿真与试验,验证本文提出方法的有效性。
1 位移传感器的温度补偿原理位移传感器可分为电位式位移传感器、电感式位移传感器和电涡流式位移传感器等类型,其中电位式位移传感器具有尺寸小,输出信号大,耐高温高压的优点,由于井下工具内部空间有限,且通常工作在高温高压环境中,因此电位式位移传感器非常适合应用在井下工具中。
传感器电路中的温度补偿技术随着科技的进步和应用范围的扩大,传感器在多个领域起着重要的作用。
然而,传感器在测量过程中常常受到温度变化的影响,这可能导致测量数据的误差。
为了解决这个问题,温度补偿技术应运而生。
本文将讨论在传感器电路中应用的温度补偿技术及其原理。
首先,我们需要理解温度对传感器测量结果的影响。
传感器中常见的温度影响因素包括温度引起的电阻变化、电压漂移、信号放大器的温度漂移等。
这些因素可能导致测量结果与实际值之间存在一定的偏差。
因此,温度补偿技术的目标是通过对传感器电路进行设计和控制,减小或消除由温度变化导致的误差。
传感器电路中常用的温度补偿技术包括电桥补偿、差分放大器、热电偶和温度传感器。
下面将逐一介绍这些技术的原理和应用。
电桥补偿是一种常见的传感器温度补偿技术。
电桥补偿通过在传感器电路中添加一个称为补偿电桥的电路来实现。
补偿电桥和主电桥之间的差异可以通过调整电桥的电阻来实现。
当温度变化时,补偿电桥中的电阻值会发生变化,从而通过电桥平衡来消除温度引起的误差。
这种方法通常应用于称重传感器和应变传感器。
差分放大器是另一种常见的传感器温度补偿技术。
差分放大器是一种电路,它可以将输入信号的差异放大到输出信号。
在传感器电路中,差分放大器可以通过将传感器的温度响应与一个参考信号进行比较来实现温度补偿。
通过调整差分放大器的参数,如增益和偏移量,可以使输出信号与温度无关。
热电偶是一种常见的温度传感器,它利用两种不同金属之间的热电效应来测量温度差异。
当两种金属处于不同温度时,它们之间会产生电势差,该电势差可以与温度变化成比例。
传感器电路中常使用差动放大器来处理热电偶的输出信号,并通过参考电势的调整来实现温度补偿。
温度传感器是专门针对温度补偿设计的传感器。
温度传感器可以测量环境温度,并将其作为输入信号传输到传感器电路中。
传感器电路可以根据温度传感器的输出信号进行相应的调整,以消除由温度变化导致的误差。
总结起来,温度补偿技术在传感器电路中扮演着重要的角色。
热电偶dcs温度补偿热电偶(Thermocouple)是一种用于测量温度的传感器,其原理是利用不同金属间热电势的差异来表达温度的变化。
热电偶广泛应用于工业领域,在DCS(Distributed Control System)中起到关键的温度测量和控制作用。
然而,由于热电偶本身特性的影响以及环境因素的干扰,热电偶温度测量存在一定的误差。
为了提高热电偶测量的准确性,温度补偿技术成为了必不可少的一环。
1. 温度补偿的意义温度补偿是指根据环境和特定条件对热电偶的温度测量进行修正,以消除误差并提高测量准确性。
热电偶在实际应用中会受到环境温度、线路电阻、电缆长度等多种因素的影响,而这些因素可能会导致热电偶测量结果的偏差。
通过温度补偿,可以提高热电偶测量的精度,确保数据的准确性和可靠性。
2. 温度补偿原理温度补偿的核心原理是参照热电偶的热电势特性和温度特性曲线,结合环境条件进行修正。
根据热电偶工作原理,不同的金属组合产生的热电势随温度的变化而变化。
通过对热电势-温度关系曲线的研究,可以获得热电偶热电势与实际温度之间的转换关系。
在DCS系统中,通过测量热电势并结合补偿算法,可以实时计算出补偿后的温度值。
3. 温度补偿方法温度补偿方法主要包括基于线性关系的补偿和非线性关系的补偿。
基于线性关系的补偿方法是根据热电偶的温度特性曲线进行插值计算,通过线性化逼近的方法进行补偿。
该方法适用于温度变化范围较小且线性程度较好的情况。
对于非线性关系的补偿,常用的方法是采用多项式函数拟合或者特定算法进行修正。
这些方法适用于温度变化范围较大且热电偶特性曲线存在较大非线性的情况。
通过精确的非线性补偿算法,可以更准确地估算出实际温度值。
4. DCS系统中的温度补偿在DCS系统中,温度补偿技术通常通过软件算法实现。
DCS系统可以根据实际需求采用不同的补偿方法,以达到最佳的温度测量效果。
通过合理的温度补偿策略,可以大大提高系统的稳定性和可靠性。
传感器的问题解决方案概述传感器是现代科技中的重要组成部分,广泛应用于各个领域,如工业自动化、环境监测、医疗设备等。
然而,传感器在使用过程中可能会遇到各种问题,如误差、灵敏度下降、工作不稳定等。
本文将介绍一些常见的传感器问题,并提供相应的解决方案。
问题一:误差传感器的误差是指测量结果与真实值之间的差异。
误差可能由于多种因素引起,如环境温度变化、电源电压波动等。
解决误差问题的方法有以下几种:1. 校准传感器:定期对传感器进行校准,以确保测量结果的准确性。
校准可以通过标准物体进行比较或使用校准设备进行自动校准。
2. 温度补偿:对于受温度影响较大的传感器,可以使用温度补偿技术来消除温度变化对测量结果的影响。
温度补偿可以通过软件算法或硬件电路实现。
3. 选择合适的传感器:在选购传感器时,应根据具体应用需求选择合适的传感器,以确保测量结果的准确性和稳定性。
问题二:灵敏度下降传感器的灵敏度是指传感器对被测量物理量变化的敏感程度。
灵敏度下降可能由于长时间使用、灰尘积累等原因引起。
以下是解决灵敏度下降问题的方法:1. 清洁传感器:定期清洁传感器表面,以去除灰尘和污垢,恢复传感器的灵敏度。
清洁可以使用无尘布或特殊的传感器清洁剂进行。
2. 检查供电电压:传感器的灵敏度可能受到供电电压波动的影响。
检查供电电压是否稳定,并根据传感器的规格要求提供稳定的供电电压。
3. 更换传感器:如果传感器的灵敏度下降严重,无法通过清洁和调整供电电压等方法解决,可能需要更换传感器。
问题三:工作不稳定传感器的工作不稳定可能导致测量结果波动较大,影响应用的准确性。
以下是解决工作不稳定问题的方法:1. 检查供电电源:传感器的工作稳定性受到供电电源的影响。
检查供电电源是否稳定,并根据传感器的规格要求提供稳定的供电电源。
2. 检查信号线路:传感器的信号线路可能受到电磁干扰的影响,导致工作不稳定。
检查信号线路是否正确连接,并采取屏蔽措施以减少电磁干扰。
imu温度补偿算法
在惯性测量单元(IMU)中,温度对传感器数据的准确性和稳定性有着重要的影响。
为了提高IMU的性能,可采用温度补偿算法来校正温度引起的误差。
温度补偿算法是一种通过校正温度引起的偏差,以提高传感器测量数据的准确性和稳定性的技术。
该算法使用温度传感器的读数来推断其他传感器的测量误差,并进行相应的补偿。
通过准确估计传感器的温度引起的偏差,可以更准确地计算出IMU的姿态、加速度和角速度等测量值。
在实际应用中,温度补偿算法可以采用多种方法。
其中一种常见的方法是利用温度与传感器输出之间的线性关系进行补偿。
通过测量传感器在不同温度下的输出值,可以建立温度与输出的关系模型,从而根据当前温度来修正输出值。
另一种常见的方法是利用温度对传感器误差的非线性影响进行补偿。
在这种方法中,通过对传感器输出与温度之间的非线性关系进行建模,可以准确估计传感器的温度引起的误差,并相应地对测量数据进行校正。
除了以上两种方法,还有其他一些高级的温度补偿算法,例如卡尔曼滤波器和人工神经网络等。
这些算法可以利用多个传感器的测量数据和温度信息,通过复杂的数学模型和算法,实现更准确和稳定的温度补偿。
总结而言,imu温度补偿算法是一种通过校正传感器温度引起的误差来提高IMU性能的技术。
它可以有效地提高测量数据的准确性和稳定性,从而在各种应用中获得更可靠和精确的结果。
tdc温度补偿方法
温度补偿方法是一种用于解决测量过程中温度变化引起的误差的技术。
在传感器测量中,温度变化往往会对测量结果产生影响,导致不准确的测量结果。
因此,为了提高测量的准确性,需要采用温度补偿方法进行校正。
传统的温度补偿方法包括两种:硬件补偿和软件补偿。
硬件补偿主要通过传感器的设计和组装来减小温度变化对测量结果的影响。
例如,通过在传感器中添加温度传感器来测量环境温度,并结合传感器的参数进行补偿计算,从而消除温度变化引起的误差。
软件补偿方法主要通过使用算法进行温度补偿。
传感器的温度特性通常可以建立数学模型进行描述,因此可以通过测量环境温度,并将其作为输入,应用补偿算法来计算真实的测量值。
常见的软件补偿方法包括线性插值、多项式拟合、神经网络等。
除了传统的硬件补偿和软件补偿方法外,还有一些新的温度补偿方法被提出。
例如,使用温度传感器网络来实时监测温度变化,并自适应地进行补偿;利用机器学习算法对数据进行分析和建模,从而更准确地进行温度补偿。
总之,温度补偿方法对于提高测量的准确度至关重要。
不同的应用场景可能需要不同的补偿方法,在选择补偿方法时,需要考虑传感器的特性、测量环境和应用需求。
通过合理选择和应用温度补偿方法,可以有效地减小温度变化对测量结果的影响,从而提高测量的准确性和可靠性。
rational dmis温度补偿概述及解释说明1. 引言1.1 概述本文旨在探讨和解释理性DMIS温度补偿的相关概念和原理。
随着测量技术的不断发展和应用领域的不断拓展,温度对测量结果的影响逐渐引起人们的重视。
因此,针对DMIS(Dimensional Measuring Interface Specification)测量中的温度补偿问题进行研究至关重要。
1.2 文章结构本文分为五个部分,首先在引言部分提供了全文的概述,并说明了文章结构。
接下来,第二部分将介绍理性DMIS温度补偿的定义、温度对测量结果的影响以及DMIS温度补偿原理。
然后,第三部分将详细介绍基于传感器测量值和基于环境温度变化模型两种常见的温度补偿方法,并给出实际应用中DMIS温度补偿的案例分析。
第四部分将评估DMIS温度补偿效果的指标与方法,并进行温度补偿误差来源与分析以及具体案例研究。
最后,在第五部分中总结主要观点和研究结果,并展望未来DMIS温度补偿的研究方向。
1.3 目的本文的主要目的是为读者提供关于理性DMIS温度补偿的全面概述和解释说明。
通过对温度补偿方法和应用案例的分析,读者可以更好地了解DMIS温度补偿技术在实际测量中的作用和效果。
同时,文章还将对DMIS温度补偿效果评估和误差分析进行详细探讨,帮助读者深入理解该技术在精确测量领域中存在的局限性和可行性。
最后,本文也将展望未来DMIS温度补偿研究方向,为相关领域的科研人员提供参考和启示。
2. 正文:2.1 理性DMIS温度补偿的定义理性DMIS温度补偿是一种用于解决由于环境温度变化引起的测量误差的技术。
在测量行业中,测量设备(如协调测量机和刚性测头)随着环境温度的变化而发生尺寸膨胀或收缩,这会对测量结果产生不可忽视的影响。
因此,为了提高测量精度和准确性,需要进行温度补偿。
2.2 温度对测量结果的影响温度是导致测量误差主要来源之一。
当环境温度变化时,测量设备的尺寸也会发生相应的变化。
应变式传感器的温度误差及补偿方法作者:张宁来源:《价值工程》2012年第04期摘要:分析了应变式传感器在实际应用中由于环境温度变化等因素的影响产生的附加误差,给出了几种温度误差的补偿方法,以提高测量的准确性。
关键词:应变式传感器;温度误差;补偿中图分类号:TS3 文献标识码:A文章编号:1006-4311(2012)04-0011-020引言应变式传感器以电阻应变片为转换元件,应变片粘贴在被测试件表面,由于被测试件的变形使其表面产生应变,从而引起电阻应变片的阻值变化,通过测量电阻的变化即反映了应变或应力的大小。
电阻应变片不仅能够测量应变,而且对其他的物理量,只要能变为应变的相应变化,都可进行测量,如可以测量力、压力、位移、力矩、重量、温度和加速度等物理量。
它结构简单、体积小、测量范围广、频率响应特性好、适合动态和静态测量、使用寿命长、性能稳定可靠,是目前应用最广泛的传感器之一[1-3]。
电阻应变片由于温度变化引起的电阻变化与试件应变所产生的电阻变化几乎有相同的数量级,如果不采取必要的措施克服温度的影响,测量的精度无法保证。
1温度误差产生的原因1.1 电阻温度系数的影响应变片敏感栅的电阻丝阻值随温度变化的关系可用下式表示:Rt=R0(1+?琢0)?驻t(1)式中:Rt——温度为t时的电阻值;R0——温度为t0时的电阻值;?琢0——温度为t0时金属丝的电阻温度系数;Δt——温度变化值,Δt=t-t0。
当温度变化Δt时,电阻丝电阻的变化值为:ΔR=Rt-R0=R0?琢0Δt(2)1.2 试件材料和电阻丝材料的线膨胀系数的影响当试件与电阻丝材料的线膨胀系数相同时,不论环境温度如何变化,电阻丝的变形仍和自由状态一样,不会产生附加变形。
当试件与电阻丝材料的线膨胀系数不同时,由于环境温度的变化,电阻丝会产生附加变形,从而产生附加电阻变化。
设电阻丝和试件在温度为0℃时的长度均为l0,它们的线膨胀系数分别为βs和βg,若两者不粘贴,则它们的长度分别为ls=l0(1+βsΔt),lg=l0(1+βgΔt)(3)当两者粘贴在一起时,电阻丝产生的附加变形Δl、附加应变εβ和附加电阻变化ΔRβ分别为Δl=lg-ls=(βg-βs)l0Δt(4)εβ=■=(βg-βs)Δt,ΔRt=K0R0εβ=K0R0(βg-βs)Δt(5)那么由于温度变化而引起的应变片总电阻相对变化量为■=■=[?琢0+K0(βg-βs)]Δt(6)折合成附加应变量或虚假的应εt,有εt=■=■+(βg-βs)Δt (7)由式(6)和式(7)可知,因环境温度变化而引起的附加电阻的相对变化量,除了与环境温度有关外,还与应变片自身的性能参数(K0,?琢0,βs)以及被测试件线膨胀系数βg有关。
温度补偿的方法一般分为硬件补偿和软件补偿两种方法;。
目前应用较广泛的是利用微处理器实现温度漂移软件补偿方法。
本文要介绍的温度补偿方法也属于一种软件补偿,只是在具体实现的过程中提出了新的设计方案—采用单总线数字温度传感器DS1820芯片和LonWorks现场总线技术中的神经元芯片(Neuron Chip即CPU)实现传感器的温度补偿,并以电化学传感器为例,详细介绍了它的硬件电路和软件设计部分。
二、传感器温度漂移软件补偿原理由于周围环境温度变化而引起传感器的附加误差,可以采用软件的方法来修正,其基本思路是:在传感器内靠近对温度敏感的部件处,安装一个测温元件,用以检测传感器所在环境的温度;把测温元件的输出经过多路开关与信号同一路径送入CPU(或者采用多通道模/数转换环节),根据温度误差的数学模型去补偿被测信号,以达到精确测量的目的,其中温度误差修正模型一般是根据具体的传感器温度特性用曲线拟合方法而建立的。
传感器采用这种软件补偿方法解决温度附加误差时,通常测温元件大多采用热电阻,因此必须增加相应的热电阻温度变送器以及A/D转换两部分的电路,任何一个环节都不能缺少,具体实施起来难免显得有些繁琐,而且两部分电路的温度特性可能成为新的附加误差。
三、传感器温度漂移软件补偿新方案针对上述提出的问题,我们可以通过用数字式温度传感器代替热电阻检测周围环境温度来解决。
在这里我们推荐使用美国Dallas半导体公司研制生产的DS1820芯片一种单总线数字温度传感器,它具有许多独特的优良性能:(1)可以把温度信号直接转换为9位数字量,温度的转换可以在1秒内完成;(2)只通过一根数据线就能实现与微处理器的通讯,而且芯片正常工作所需要的电源也可以从这根数据线上获得,无需外部电源;(3)具有微型化、低功耗、高性能、抗干扰能力强、易配微处理器等优点;(4)价格便宜,仅为普通温度变送器的十分之一。
经实验研究证明这种传感器可以很好地解决温度漂移软件补偿中的测温问题。
传感器实时自校准/自补偿的实现第20卷第4期仪器仪表,1999年8月传感器实时自校准/自补偿的实现赵敏;2v王铮余瑞芬(南京航空航天大学测试工程系南京210016)摘要本文提出了对传感器进行实时自枝准/自补偿的一种新方法,首先从原理上进行分析论证,给出了用单片机系统对传感器进行自校准/自补偿的方案+并提供了相应的实验数据,证明所提出的自枝准/自补偿方法是切实可行的.关键词实时传感器自校准自补偿--一●—__—一●●_●_一●——_一TheRealizationontheRea1..timeSelf..calibration andSelf—compensationofSensor ZhaoMinChenXiaopingWangZhengYuRuifen(NUAANanjinggt0016) AbstractAnewmethodofsensorwiththereal—-timeself-calibrationandself-compensationtechniqueispresent—-ed,whichisanalyzedandjustifiedfromprinciple.Aschemeonwhichamicro—controllerisusedtodothereal—timeself-calibrationandself-compensationtosensorandrelativedataareprovided.Itisteste dthatthemethodot real—timeself—calibrationandself—compensationisfeasible. KeywordsReal—timeSensorSelf-calibrationSelf-compensation1引言一般来说,传感器在使用过程中都有温漂,时漂或某些参数发生变化的现象.对温漂可进行温度补偿来消除由温度影响给测量带来的误差.但传感器工作一段时问之后,产生的时漂或某些参数发生变化,又该如何减小由此给测量带来的误差呢?现在能不能找到一种方法,在不用标准激励或校准传感器的情况下,可以对传感器进行实时校准,同时能减小传感器参数发生变化和时漂给测量带来的影响.我们利用软件编程将实时自校准和自补偿法相结合,对传感器的输出数据进行综合修正,减小温漂,时漂及传感器参数发生变化给测量带来的误差,确保测量数据的准确,可靠.下面我们就以硅压阻传感器为例讨论传感器实时自校准/ 自补偿的实现.硅压阻传感器具有频响高,体积小,精度高,灵敏度高等优点,但硅压阻传感器是用半导体材料制作的,受温度影响很大,因而最具有典型性2实时自校准/自补偿原理传感器的灵敏度,零位变化究其原因,实质上是桥臂电阻发生了改变.要实现自校准/自补偿就应知道桥臂电阻的变化与传感器灵敏度,零位之间的内在关系. 我们通过外加恒流激励的方法得到传感器桥臂电阻改变后输出变化的情况,通过解算找到了输出变化与灵敏度,零位之间的关系,进而实现了校准和补偿.图1是带自校准/自补偿的电桥放大电路原理图.R~R是桥臂电阻,R『是运放反馈电阻,1为恒流源, K受单片机系统控制.当K断开传感器不加载时,由运放的"虚短"性质,若R=R2=R一R:R时,可推出此时运放输出V为零位输出即补偿电压.R.一Rr…一一vl—Rh-—2RLlJ当K断开,传感.器加载时,R~R均发生AR的变化,方向如图1中所示.即R一R=R+AR,RR一R—AR,则运放输出.=k'AR+V一(2)车文于1997年12月收到,本课题获得航空工业总公司预研课鹿资金资助第4期传感器实时自校准/自朴偿的实现图1自校准/自补偿原理图式中k是一常数,与R~R…RR有关,此时传感器输出特性如图2(a)所示,图中V是传感器在标准压力P下的输出.P/kPa(a)P/kea(b)图2传感器输出特性K台上,传感器不加载时,假设R~R.参数没有发生变化,运放输出V为校准输出V∞l—R】R2R.R.+R】R4RRr—R2R3R{RE—R:RR.Rr.R】R2(R;R{+RaR.+R{R).IRR.RLR2R.+RLR.Rr+丽R2R.R~(3)此时运放输出可以看成是传感器在确定的压力作用下产生的,也就是将恒流源激励模拟成确定的压力P,如图2(a)中所示.P一P".二(4)从式(3)中可以看出,R~R中任一电阻或部分或全部发生变化,-都会发生变化,这就是自校准的依据现假设R发生了变化,则可以肯定补偿电压也发生了变化,即R一RR一R,R.一R+△R,可得f(RRrRRi)AR.RRr1一一l1刁茛^)十瓦干jJ=k2AR+v衄(5)式中k是一常数.若接通恒流源,校准输出电压也有了变化,将R--R一R.=R,R=R+AR代人(3)式中得..f(RRE+R.Rr)AR.Rj—RI1.V啊-一1]耳丽'—厂瓦干i瓦』1-lR(R+2R)(R+△R)R+2RR.一k△R+C+vl岫(6)式中k和c均为常数.此时,传感器输出曲线如图2(b)中的曲线2(曲线1是传感器参数未发生变化的输出曲线,与图2(a)中曲线一样)由实测的V呲可得出校准补偿后的压力值-=P,ldv?~.一--v—v.'(7)3实现方案根据上述自校准/自补偿原理,我们研制了由MCs一51单片机系统实现的带自校准/自补偿功能的测量系统.在采用单片机系统进行数据采集和处理时, 主要有两个过程:学习过程和正常测量过程.学习过程执行三个学习程序获得一些数据以各正常测量之用.这三个学习程序分别是:(1)补偿(零位)学习程序,(2)增益(灵敏度)学习程序,(3)校准学习程序.执行三个学习程序时传感器都置于温箱中,温度从一40℃~+60℃,分别获得三组与温度有关的数据,存人各自的EEPROM单元中.学习程序的流程如图3(a)所示. (a)学习程序流程图<b)测量程序流程图图3采用学习方法的主要优点是:1.传感器的补偿输出,增益输出和校准输出与温度的函数不是线性,其数学模型不太容易建立.用非线性插值进行软件修正,编程繁琐且精度受到影响.而有了各十温度点的补偿输出,增益输出和校准输出后,我们就可以用查表的方法对测量结果进行综合修正,提高整个系统的测量精度蠹。