基于连续空间粒子群算法研究概论
- 格式:doc
- 大小:105.00 KB
- 文档页数:3
粒子群算法原理及应用随着人工智能技术的发展,各种算法被广泛应用在数据分析、预测以及优化等方面。
其中,粒子群算法(Particle Swarm Optimization,PSO)作为一种高效的全局优化算法,在实际应用中表现出色,受到了越来越多的关注与重视。
本文将围绕粒子群算法的原理与应用进行阐述。
一、粒子群算法的原理粒子群算法是一种基于群体智能的优化算法,借鉴了鸟群或鱼群等生物群体行为的思想。
它是一种随机化搜索算法,通过模拟大量粒子在问题空间中的随机移动,不断探索解空间,从而寻找全局最优解。
具体来说,粒子群算法是基于一个粒子群的模型,其中每个粒子代表一个搜索空间内的解。
每一个粒子都有一个自身的位置和速度,而粒子的位置和速度可以通过如下公式进行更新:$v_{i,j}=wv_{i,j}+c1r1(p_{ij}-x_{ij})+c2r2(g_{ij}-x_{ij})$$x_{i,j}=x_{i,j}+v_{i,j}$其中,$v_{i,j}$表示第$i$个粒子在第$j$个搜索空间维度上的速度,$w$表示惯性权重,$c1$和$c2$分别是自己的历史最佳位置$p_{ij}$和全局最佳位置$g_{ij}$对粒子位置的影响因子,$r1$和$r2$是0~1的随机数,$x_{i,j}$是粒子的位置。
通过更新速度和位置,粒子可以向更优秀的位置移动,从而不断逼近全局最优解。
这种不断更新、迭代搜索的过程可以实现全局搜索和多目标优化等问题领域的优化求解。
二、粒子群算法的应用粒子群算法最主要的应用领域是全局优化问题,如函数优化、数据拟合、最小二乘等问题的求解。
此外,粒子群算法还被广泛应用在神经网络训练、图像处理、机器学习等领域。
(一)函数优化函数优化问题是粒子群算法最基本的应用领域之一。
例如,在参数优化问题中,可以将参数空间定义为搜索空间,通过粒子群算法不断寻找全局最优解来优化模型参数。
在现实中,这种方法已被广泛应用于金融风险分析、选股等领域。

基于粒子群算法的无监督学习算法研究无监督学习是机器学习中的一个重要分支,其目的是从未标记的数据中发现隐藏的模式和结构。
粒子群算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,通过模拟鸟群觅食行为来优化问题。
本文将研究基于粒子群算法的无监督学习算法,探讨其在数据聚类和降维等领域中的应用。
一、引言无监督学习是通过分析未标记数据来发现数据中隐藏模式和结构的方法。
与有监督学习相比,无监督学习不需要事先标记好的训练样本,因此具有更广泛应用领域和更高挑战性。
粒子群算法作为一种优化方法,在解决复杂问题上具有良好性能,并且易于实现。
二、粒子群算法粒子群算法是一种模拟鸟类觅食行为而提出来优化问题解决方案。
在PSO中,将问题看作一个搜索空间,在搜索空间内随机生成一组个体(称为粒子),每个个体都有一个位置和速度。
粒子通过跟踪自己和整个群体中最优解的位置来更新自己的速度和位置,从而逐渐找到最优解。
通过迭代更新,粒子群算法能够在搜索空间中找到全局最优解或接近最优解。
三、基于粒子群算法的无监督学习算法1. 数据聚类数据聚类是无监督学习中的一个重要任务,其目标是将相似的数据点分组到同一个类别中。
基于粒子群算法的无监督学习算法可以用于数据聚类,通过将每个粒子看作一个数据点,并根据其位置来确定所属的簇。
在迭代过程中,每个粒子根据自身与簇内其他点之间的距离来更新速度和位置,从而逐渐将相似的数据点聚集在一起。
2. 数据降维数据降维是将高维数据映射到低维空间以便进行分析和可视化的过程。
基于粒子群算法的无监督学习算法可以用于数据降维,在搜索空间内寻找一组合适的映射矩阵或特征集合来最大程度地保留原始高维数据的信息。
通过迭代更新粒子的速度和位置,可以逐渐找到最优的映射矩阵或特征集合,从而实现数据降维。
3. 异常检测异常检测是识别数据中与其它数据显著不同或异常的过程。
基于粒子群算法的无监督学习算法可以用于异常检测,通过将每个粒子看作一个数据点,并根据其位置和速度来判断其是否为异常点。

基于粒子群优化算法的生产计划调度研究引言近年来,随着全球制造业的快速发展和市场竞争的加剧,生产计划调度变得尤为重要。
传统的计划调度方法常常难以处理多变的生产环境和复杂的制造过程。
为了优化生产计划调度,提高生产效率,粒子群优化算法被引入并得到了广泛应用。
本文将从理论和应用两个角度综述基于粒子群优化算法的生产计划调度研究。
理论研究1.粒子群优化算法的原理粒子群优化算法是一种基于群体智能的优化方法,灵感源自于鸟类群体觅食行为。
算法的基本原理是通过模拟粒子在问题的搜索空间中的运动,以找到最优解。
每个粒子代表一个解,并根据个体最优和全局最优进行更新调整。
通过迭代的方式,逐步逼近最优解。
2.粒子群优化算法在生产计划调度中的应用在生产计划调度中,粒子群优化算法可用于优化作业顺序和资源分配。
通过对各作业的调度顺序进行优化,可以减少等待时间和生产周期,提高生产效率。
同时,合理安排资源分配能够避免资源的浪费和瓶颈的产生。
应用研究1.粒子群优化算法在制造业中的应用案例举例来说,某工厂的生产车间同时存在多个生产任务,每个任务有不同的加工时间和工序。
通过粒子群优化算法,可以找到最佳的生产顺序和资源分配方案,从而最大程度地提高生产效率,减少生产成本。
2.粒子群优化算法在物流领域的应用在物流领域,一个重要的问题是如何合理安排货物的运输路线和交通工具的调度。
通过粒子群优化算法,可以优化货物的运输路径和货车的调度顺序,从而减少运输成本和时间,提高物流效率。
结论通过对基于粒子群优化算法的生产计划调度研究进行综述,可以看出该算法在优化生产计划调度中具有潜力和应用前景。
然而,仍然存在一些挑战和问题,如算法参数的选择和计算复杂度的优化。
未来的研究可以进一步探索如何提高算法的鲁棒性和应用范围,以推动生产计划调度的发展和应用。
粒子群算法的寻优算法摘要:粒子群算法是在仿真生物群体社会活动的基础上,通过模拟群体生物相互协同寻优能力,从而构造出一种新的智能优化算法。
这篇文章简要回顾了粒子群算法的发展历史;引入了一个粒子群算法的实例,对其用MATLAB进行编程求解,得出结论。
之后还对其中的惯性权重进行了延伸研究,对惯性权重的选择和变化的算法性能进行分析。
关键词:粒子群、寻优、MATLAB、惯性权重目录:1.粒子群算法的简介 (2)1.1 粒子群算法的研究背景 (2)1.2 起源 (2)1.3 粒子群理论 (3)2.案例背景 (4)2.1问题描述 (4)2.2 解题思路及步骤 (4)3.MATLAB编程实现 (5)3.1设置PSO算法的运行参数 (5)3.2种群初始化 (5)3.3寻找初始极值 (5)3.4迭代寻优 (6)3.5结果分析 (6)4.惯性权重对PSO算法的影响 (8)4.1惯性权重的选择 (8)4.2惯性权重变化的算法性能分析 (8)5 结论 (10)参考文献: (11)1.粒子群算法的简介粒子群算法(Particle Swarm Optimization)是一种新的智能优化算法。
谈到它的发展历史,就不得不先介绍下传统的优化算法,正因为传统优化算法自身的一些不足,才有新智能优化算法的兴起,而粒子群算法(PSO)就是在这种情况下发展起来的。
1.1 粒子群算法的研究背景最优化是人们在科学研究、工程技术和经济管理等领域中经常遇到的问题。
优化问题研究的主要内容是在解决某个问题时,如何从众多的解决方案中选出最优方案。
它可以定义为:在一定的约束条件下,求得一组参数值,使得系统的某项性能指标达到最优(最大或最小)。
传统的优化方法是借助于优化问题的不同性质,通常将问题分为线性规划问题、非线性规划问题、整数规划问题和多目标规划问题等。
相应的有一些成熟的常规算法,如应用于线性规划问题的单纯形法,应用于非线性规划的牛顿法、共扼梯度法,应用于整数规则的分枝界定法、动态规划等。
![粒子群优化算法概述[1]](https://uimg.taocdn.com/020552f8c1c708a1284a4497.webp)
计算机辅助工艺课程作业学生:赵华琳学号: s时间:09年6月粒子群优化算法概述0.前言优化是科学研究、工程技术和经济管理等领域的重要研究工具。
它所研究的问题是讨论在众多的方案中寻找最优方案。
例如,工程设计中怎样选择设计参数,使设计方案既满足设计要求又能降低成本;资源分配中,怎样分配有限资源,使分配方案既能满足各方面的基本要求,又能获得好的经济效益。
在人类活动的各个领域中,诸如此类,不胜枚举。
优化这一技术,正是为这些问题的解决,提供理论基础和求解方法,它是一门应用广泛、实用性很强的科学。
近十余年来,粒子群优化算法作为群体智能算法的一个重要分支得到了广泛深入的研究,在路径规划等许多领域都有应用。
本文主要结合现阶段的研究概况对粒子群优化算法进行初步介绍。
1.粒子群优化算法的基本原理1.1 粒子群优化算法的起源粒子群优化(PSO)算法是由Kennedy和Eberhart于1995年用计算机模拟鸟群觅食这一简单的社会行为时,受到启发,简化之后而提出的[1][2]。
设想这样一个场景:一群鸟随机的分布在一个区域中,在这个区域里只有一块食物。
所有的鸟都不知道食物在哪里。
但是他们知道当前的位置离食物还有多远。
那么找到食物的最优策略是什么呢。
最简单有效的方法就是追寻自己视野中目前离食物最近的鸟。
如果把食物当作最优点,而把鸟离食物的距离当作函数的适应度,那么鸟寻觅食物的过程就可以当作一个函数寻优的过程。
鱼群和鸟群的社会行为一直引起科学家的兴趣。
他们以特殊的方式移动、同步,不会相互碰撞,整体行为看上去非常优美。
生物学家CargiReynolds提出了一个非常有影响的鸟群聚集模型。
在他的模拟模型boids中,每一个个体遵循:避免与邻域个体相冲撞、匹配邻域个体的速度、试图飞向感知到的鸟群中心这三条规则形成简单的非集中控制算法驱动鸟群的聚集,在一系列模拟实验中突现出了非常接近现实鸟群聚集行为的现象。
该结果显示了在空中回旋的鸟组成轮廓清晰的群体,以及遇到障碍物时鸟群的分裂和再度汇合过程。
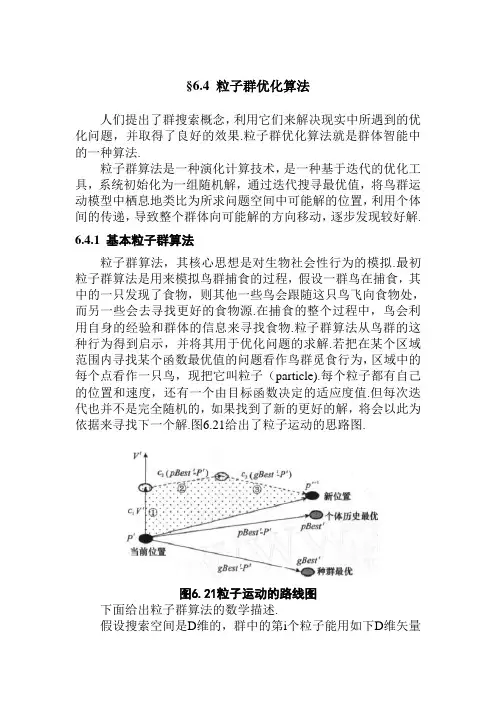
§6.4 粒子群优化算法人们提出了群搜索概念,利用它们来解决现实中所遇到的优化问题,并取得了良好的效果.粒子群优化算法就是群体智能中的一种算法.粒子群算法是一种演化计算技术,是一种基于迭代的优化工具,系统初始化为一组随机解,通过迭代搜寻最优值,将鸟群运动模型中栖息地类比为所求问题空间中可能解的位置,利用个体间的传递,导致整个群体向可能解的方向移动,逐步发现较好解.6.4.1 基本粒子群算法粒子群算法,其核心思想是对生物社会性行为的模拟.最初粒子群算法是用来模拟鸟群捕食的过程,假设一群鸟在捕食,其中的一只发现了食物,则其他一些鸟会跟随这只鸟飞向食物处,而另一些会去寻找更好的食物源.在捕食的整个过程中,鸟会利用自身的经验和群体的信息来寻找食物.粒子群算法从鸟群的这种行为得到启示,并将其用于优化问题的求解.若把在某个区域范围内寻找某个函数最优值的问题看作鸟群觅食行为,区域中的每个点看作一只鸟,现把它叫粒子(particle).每个粒子都有自己的位置和速度,还有一个由目标函数决定的适应度值.但每次迭代也并不是完全随机的,如果找到了新的更好的解,将会以此为依据来寻找下一个解.图6.21给出了粒子运动的思路图.图6.21粒子运动的路线图下面给出粒子群算法的数学描述.假设搜索空间是D维的,群中的第i个粒子能用如下D维矢量所表示:12(,,,)i i i iD X x x x '=(6.43)每个粒子代表一个潜在的解,这个解有D 个维度.每个粒子对应着D 维搜索空间上的一个点.粒子群优化算法的目的是按照预定目标函数找到使得目标函数达到极值的最优点.第i 个粒子的速度或位置的变化能用如下的D 维向量表示:12(,,,)i i i iD V v v v '= (6.44)为了更准确地模拟鸟群,在粒子群优化中引入了两个重要的参量.一个是第i 个粒子曾经发现过的自身历史最优点(Personal best ,pbest),可以表示为:12(,,,)i i i iD P p p p '= (6.45)另一个是整个种群所找到的最优点(Global best ,gbest),可以表示为:12(,,,)g g g gD P p p p '= (6.46)PSO 初始化为一群随机粒子(随机解),然后通过迭代找到最优解.在每一次的迭代中,粒子通过跟踪两个“极值”(i P 和g P )来更新自己.在找到这两个最优值后,粒子通过下面的公式来更新自己的速度和位置:1122(1)()()(()())()(()())id id id id gd id v t wv t c r t p t x t c r t p t x t +=+-+-,(速度更新公式)(6.46)(1)()(1)id id id x t x t v t +=++(位置更新公式) (6.47)其中w 称之为惯性因子,在一般情况下,取1w =,1,2,,t G = 代表迭代序号,G 是预先给出的最大迭代数;1,2,,d D = , 1,2,,i N = ,N 是群的大小;1c 和2c 是正的常数,分别称为自身认知因子和社会认知因子,用来调整i P 和g P 的影响强度.1r 和2r 是区间[0,1]内的随机数.由(6.46)和(6.47)构成的粒子群优化称为原始型粒子群优化.从社会学的角度来看,公式(6.47)的第一部分称为记忆项,表示上次优化中的速度的影响;公式第二部分称为自身认知项,可以认为是当前位置与粒子自身最优位置之间的偏差,表示粒子的下一次运动中来源于自己经验的部分;公式的第三部分称为社会认知项,是一个从当前位置指向种群最佳位置的矢量,反映了群内粒子的协作和知识共享.可见,粒子就是通过自己的经验和同伴中最好的经验来决定下一步的运动.随着迭代进化的不断进行,粒子群逐渐聚集到最优点处,图6.22 给出了某个优化过程中粒子逐渐聚集的示意图.图6.22 粒子群在优化过程聚集示意图 综上所述,我们得到如下基本粒子群算法流程:(1) 设定参数,初始化粒子群,包括随机位置和速度;(2) 评价每个粒子的适应度;(3) 对每个粒子,将其当前适应值与其曾经访问过的最好位置pbest 作比较,如果当前值更好,则用当前位置更新pbest ;(4) 对每个粒子,将其当前适应值与种群最佳位置gbest 作比较,如果当前值更好,则用当前位置更新gbest ;(5) 根据速度和位置更新公式更新粒子;(6)若未满足结束条件则转第二步;否则停止迭代.迭代终止条件根据具体问题一般选为迭代至最大迭代次数或粒子群搜索到的最优位置满足预定的精度阈值.6.4.2 粒子群算法的轨迹分析1998年,Ozcan 在文献[13]中首先对粒子在一维空间的轨迹进行了讨论,并在1999年将粒子运动的轨迹分析推广到多维空间的情形,2002年,文献[14]从矩阵代数的观点讨论了粒子的轨迹问题,本节采用[15]中的差分方程思想分别讨论单个粒子在一维以及二维空间的轨迹问题。
基于粒子群优化算法的任务调度研究随着计算机技术的不断发展,人们对于计算机的利用也越来越广泛,尤其是在各种业务领域和科学研究中,计算机的作用日益重要。
然而,在计算机的运行过程中,如何对任务进行调度管理却成为了一项关键的技术挑战。
在这种情况下,一种基于粒子群优化算法的任务调度研究方法被提出,帮助人们更好地处理大规模任务的调度问题。
一、算法原理简介粒子群优化算法(Particle Swarm Optimization,PSO)是一种基于群体智能模型的优化算法,其基本思想源自于模拟鸟群、鱼群等生物群体的游动行为。
该算法通过定义一群“粒子”来描述待优化问题的解空间,其中每个粒子用来表示解向量。
在每一个时刻,所有粒子都会尝试向着当前的最优解位置靠近,通过不断的更新粒子的位置,逐步找到全局最优解。
在此过程中,每个粒子的速度和位移都是通过计算当前粒子与自身历史最优值以及整个群体历史最优值之间的距离来确定的。
二、粒子群优化算法与任务调度在计算机的任务调度问题中,主要考虑如何使多个任务更好地按照优化目标进行调度,以达到整个计算机系统的最优化效果。
而粒子群优化算法可以为任务调度问题提供一种新的解决方案。
具体来说,可以通过定义一个包含多个粒子的群体,每个粒子表示一个可能的任务调度解,然后通过不断地迭代来逐步找到最优的任务调度方案。
在此过程中,每个粒子的速度和位移都是根据当前的任务调度问题来确定的。
首先,需要将任务调度问题转化为适合PSO算法的优化目标函数,然后通过设置适当的参数和约束条件,确定每个粒子的位置和速度,并计算每个粒子的适应度值。
通过不断的迭代计算和更新,逐步找到最优的任务调度解,从而实现更有效的任务调度管理。
三、基于粒子群优化算法的任务调度研究现状目前,基于粒子群优化算法的任务调度研究已经得到了广泛的关注和应用。
研究人员通过不断优化算法的细节,使得基于粒子群优化算法的任务调度能够更好地处理大规模任务调度问题,并取得了不错的效果。

基于粒子群算法的优化问题求解研究第一章简介随着科技的不断发展,人们对求解优化问题的效率要求越来越高。
粒子群算法是在“群体智能”(Swarm Intelligence)思想的启发下形成的一种优化算法。
群体智能是指一些简单的,直接的个体之间相互作用,以实现群体行为的一类智能行为。
粒子群算法是以自然群体行为为基础形成的启发式求解方法。
通过这个算法,优化问题可以被解决,并且粒子可以在搜索空间中找到全局最优解,因此在科学研究和工程应用的许多领域中有广泛的应用。
第二章粒子群算法的原理粒子群算法是一种基于群体智能的启发式优化算法。
在粒子群算法中,每个粒子都是一种解决方法,这些粒子被放置在一个多维空间中。
每个粒子都有一个位置和速度,位置是粒子当前的解决方案,速度代表前行的方向和速度。
任何一个粒子的位置是被一个适应度函数评价的,适应度函数是将问题的解与优化目标进行关联的函数。
参考群体行为的自然现象,粒子应用当前个体的位置和群体内已有粒子的信息来确定下一步移动位置。
群体内所有粒子共享当前最优解,这样粒子便可以更新社会信息并在全局最优解附近聚集。
速度和位置不断变化,直到找到全局最优解或达到迭代次数上限。
第三章粒子群算法的应用在很多领域,粒子群算法已经成功地被应用。
基于粒子群算法的问题求解研究可以应用在如下的领域:1.问题最优解的寻找。
在诸如神经网络、数据挖掘或组合优化问题这类数据密集型应用中,可以使用粒子群算法来优化搜索最优化解。
2.预测。
粒子群算法还可以用于时间序列问题的预测,比如股市预测、经济数据预测等等。
3.图像处理。
例如用于图像压缩、图像分割等方面。
4.机器学习。
粒子群算法可以与机器学习结合,解决这些问题,如聚类问题和预测问题等等。
第四章粒子群算法的优缺点优点:1.易于实现和操作。
粒子群算法的实现和掌握难度都很低,简单、清晰、实用。
2.收敛速度快。
粒子群算法能够较小的计算时间内迅速进行优化和收敛,有时甚至能够达到全局最优解。

粒子群算法综述控制理论与控制工程09104046 吕坤一、粒子群算法的研究背景人工智能经过半个世纪的发展,经历了由传统人工智能、分布式人工智能到现场人工智能等阶段的发展。
到二十世纪九十年代,一些学者开始从各种活动和现象的交互入手,综合地由个体的行为模型开始分析社会结构和群体规律,于是90年代开始,就产生了模拟自然生物群体(swarm)行为的优化技术。
Dorigo等从生物进化的机理中受到启发, 通过模拟蚂蚁的寻径行为, 提出了蚁群优化方法;Eberhar 和Kennedy于1995年提出的粒子群优化算法是基于对鸟群、鱼群的模拟。
这些研究可以称为群体智能(swarm-intelligenee)。
通常单个自然生物并不是智能的,但是整个生物群体却表现出处理复杂问题的能力,群体智能就是这些团体行为在人工智能问题中的应用。
粒子群优化(Particle Swarm Optimization , PSC)最初是处理连续优化问题的, 目前其应用已扩展到组合优化问题。
由于其简单、有效的特点,PSC已经得到了众多学者的重视和研究。
二、粒子群算法的研究现状及研究方向粒子群算法(PSC)自提出以来,已经历了许多变形和改进,包括数学家、工程师、物理学家、生物学家以及心理学家在内的各类研究者对它进行了分析和实验,大量研究成果和经验为粒子群算法的发展提供了各许多合理的假设和可靠的基础,并为实际的工业应用指引了新的方向。
目前,PSC的研究也得到了国内研究者的重视,并已取得一定成果。
十多年来,PSC的研究方向得到发散和扩展,已不局限于优化方面研究。
PSC 算法按其研究方向分为四部分:算法的机制分析研究、算法性能改进研究、算法的应用研究及离散性PSC算法研究。
算法的机制分析主要是研究PSC算法的收敛性、复杂性及参数设置。
算法性能改进研究主要是对原始PSC算法的缺陷和不足进行改进,以提高原始PSC算法或标准PSC算法的一些方面的性能。
基于粒子群优化的动态路径规划算法研究随着自动化技术的发展,机器人成为了生产与生活中不可或缺的一部分。
然而,机器人的路径规划问题一直是自动化领域研究的热点之一。
在无人驾驶、物流配送、医疗护理等领域,需要机器人在复杂和动态的环境中规划路径,实现自主移动。
因此,提高路径规划的效率和灵活性具有极高的实际应用价值。
本文研究基于粒子群优化算法的动态路径规划算法,旨在提高机器人路径规划的效率和鲁棒性。
一、动态路径规划的特点传统的路径规划算法通常是静态规划,即在环境不变的情况下规划出一条最优路径,然后机器人按照该路径前进。
但是,实际上机器人的环境不断变化,存在动态障碍物、行人等,静态规划算法往往无法适应这些变化,从而导致路径规划的失败。
因此,需要一种能够在动态环境中实时调整路径的动态路径规划算法。
动态路径规划算法需要具备以下特点:1. 实时性:能够在短时间内快速响应环境的变化,调整机器人的路径。
2. 鲁棒性:能够适应各种复杂环境,对环境变化具有一定的容忍度。
3. 智能性:能够从历史经验中学习,自适应地调整路径规划策略,从而提高规划效率和质量。
二、粒子群优化算法的原理粒子群优化算法是一种启发式优化算法,模拟了鸟群、鱼群等动物集体智能的行为规律。
其基本思想是通过粒子群中的个体之间相互通讯和信息交流,以不断探索搜索空间,寻找问题的最优解。
具体实现步骤如下:1. 初始化粒子群:设定粒子群的规模和维度,每个粒子表示为一个向量,每个元素表示该维度上的一个可行解。
2. 生成速度和位置:对每个粒子随机生成速度向量和初始位置向量。
3. 更新速度和位置:对每个粒子根据自身历史最优解和当前全局最优解,计算新的速度向量和位置向量。
4. 评价适应度:根据适应度函数评价每个粒子的适应度。
5. 更新历史最优解和全局最优解:根据适应度函数更新每个粒子的历史最优解,同时更新全局最优解。
6. 判断终止条件:判断是否达到终止条件,如果未达到,则跳转到第3步。
基于粒子群优化算法的组合优化问题解决方法研究近年来,随着计算机技术的飞速发展,组合优化问题的解决方法也得到了大幅改善。
其中,基于粒子群优化算法的组合优化问题解决方法,备受研究者们的青睐。
本文将结合相关文献,对这一领域的研究进行探讨。
一、粒子群优化算法简介粒子群优化算法是一种仿生算法,模拟了鸟群或鱼群的行为。
在算法中,将每个解看作粒子,通过不断调整其位置和速度,以寻找全局最优解。
粒子群算法具有全局搜索能力和收敛速度快的优点,在组合优化问题求解中得到了广泛应用。
二、粒子群优化算法在组合优化问题中的应用1. 旅行商问题旅行商问题是指在n个城市之间旅游,需要到达每一个城市一次,并返回出发城市,求出旅程最短的路线。
这是组合优化问题中的经典问题。
Gupta等人提出了基于粒子群优化算法的改进方法,通过优化每个粒子的速度和位置,以最小化距离,实现了对旅行商问题的求解。
2. 装箱问题装箱问题是将多个物品装入一定数量的箱子中,并使箱子的利用率最大。
该问题在物流和仓储中具有一定的应用。
张璐等人提出了基于粒子群算法的模拟退火算法,在真实数据集上的表现优于其他传统方法。
3. 排课问题排课问题是指在固定时段内,将不同课程的教学安排好,不仅需要满足学生和老师的需求,还要充分利用教室和时间资源。
某高校苏张等人通过在粒子群算法中加入多目标优化策略,实现了对排课问题的高效求解。
三、进一步探讨尽管粒子群算法在组合优化问题求解中取得了一定成就,但其单纯的算法性能仍有待提升。
研究者们表示,可以通过结合其他优化算法,如混沌搜索算法、遗传算法等,进一步提高算法的求解能力。
此外,基于粒子群算法的并行优化方法也是近年来热门的研究领域。
总之,粒子群优化算法在组合优化问题中具有广泛的应用前景,我们期待着更多科研人员加入到这一领域中,共同推动技术的发展。
基于粒子群算法的多目标优化问题研究1.引言多目标优化问题是现代工程设计和决策中经常遇到的问题之一,因为现实中往往需要优化多个目标。
传统的单目标优化问题只考虑一个目标函数,因此无法很好地解决多目标优化问题。
粒子群算法(Particle Swarm Optimization,PSO)是一种启发式优化算法,它已经广泛应用于多个领域中的优化问题。
本文将介绍粒子群算法以及基于粒子群算法的多目标优化问题研究。
2.粒子群算法原理粒子群算法是一种通过模拟自然界中鸟群或鱼群等生物群体行为来进行优化的算法,该算法由Eberhart和Kennedy在1995年提出。
粒子群算法将优化问题看作是在一个多维空间中的搜索问题,将解空间中的每一个可能的解看作一个粒子,各个粒子按照一定规则进行搜索,不断更新粒子位置和速度来寻找全局最优解。
在粒子群算法中,每个粒子都有位置和速度两个向量,位置向量表示当前的解,速度向量表示粒子的移动方向和速度大小。
在搜索过程中,每个粒子会记录自己目前找到的最优解,而全局最优解则是所有粒子的最优解中的最优解。
搜索过程中,粒子按照自身的最优解和全局最优解来调整速度和位置,以期望找到某个局部最优解,最终在搜索过程结束时得到全局最优解。
3.基于粒子群算法的多目标优化问题研究多目标优化问题需要同时优化多个目标函数,这些目标函数往往是相互矛盾的,因此需要找到一组解,这些解可以尽可能地满足多个目标函数的要求。
本章将介绍基于粒子群算法的多目标优化问题研究的方法。
3.1 基本方法在基于粒子群算法的多目标优化问题研究中,最常用的方法是多目标粒子群算法(Multi-objective Particle Swarm Optimization,MOPSO)。
该算法通过对粒子速度和位置的调整,以期望找到多个目标函数的 Pareto 前沿(Pareto Front),并从中选择最优解。
MOPSO 算法中,每个粒子的位置和速度向量都需要根据多个目标函数来计算。
粒子群算法及其应用研究4.2.4仿真实验…………………………………………………………………………..44结论……………………………………………………………………………………………………………………46致谢……………………………………………………………………………………………………………………47参考文献…………………………………………………………………………………48攻读学位期间的研究成果…………………………………………………………………..53IV粒子群算法及其应用研究索空间。
其收敛速度更快,但是对于比较复杂的问题,更容易陷入局部最优点。
式(2.3)中的第三部分cz*r::l:(gbest(t)一X,(t))是社会认知部分,它表示粒子从全局极值获得的更新消息,是粒子间的信息共享。
如果C2=0,则意味着粒子间没有了信息共享机制,只有自身的认知经验,由于个体之间没有了信息交流,一个规模为n的群体相当于运行了n个单个粒子,因此得到解的概率非常小。
假设搜索空间为[.vm舣,vmax](Vmax>O),粒子速度vm舣决定了粒子在一次迭代中最大的移动距离。
Vmax较大时,粒子的探索能力增强,但是粒子容易飞过最好解;Vmax较小时,粒子的开发能力增强,但容易陷入局部最优。
每维粒子的速度都会受到一个最大速度vm双的限制,如果某维粒子更新后的速度超过了所设的vm觚,那么该维的速度就被设为vm戕,即当vi(t)>Vm舣时,有vi(t)=vma)【,或者当vi(t)<-vm戤时,有vi(O=-vma)(。
2.1.4算法的步骤第一步:根据优化问题,确定目标函数,的位置和速度,粒子速度的范围,搜索区域,的收敛精度;第二步:计算每个粒子的适应值;初始化粒子群,包括群体规模,每个粒子学习因子,算法的最大迭代次数或是算法第三步:对每个粒子i比较它的适应值与它的个体极值pibest,如果当前值好于pibest,则替换pibest,否则pibest等于当前位置Xi;第四步:对每个粒子i,比较它的适应值与全局极值gbest,如果较好,则替换曲est;第五步:根据公式(2.3)、(2.4)更新粒子的速度和位置,如果vi<vmin将其设为vmin,Vi>Vmax将其设为Vmax;第六步:如果满足运行结束条件(误差足够好或达到了预先设定的最大迭代次数)则退出,输出最优解,否则回到第二步。
华南理工大学研究生学报——————————1基于连续空间的粒子群算法研究综述刘蓉(华南理工大学理学院,广东,广州,510640)摘 要:粒子群算法是一类基于群体智能的启发式全局优化技术。
通过粒子搜寻自身的个体最好解和整个粒子群的全局最优解来更新完成优化。
该算法概念简明、实现方便、收敛速度快、参数设置少,是一种高效的搜索算法。
本文通过对基于连续空间的粒子群算法进行研究,给出了多种改进形式以及应用,指出了各种改进存在的不足,并提出了未来可能的研究方向。
关键词:粒子群算法,群体智能,启发式,连续空间0 前言粒子群算法(Particle Swarm Optimization ,PSO )最早是在1995年由Eberhart 和Kennedy[1]共同提出的,属于群体智能优化算法的一种,是对鸟群、鱼群觅食过程中的迁徙和聚集的模拟。
鸟群在觅食的迁徙过程中,有既分散又集中的特点。
总是有那么一只鸟对食物的嗅觉较好,即对食源的大致方向具有较好的洞察力,从而这只鸟就拥有食源的较好信息。
由于在找到食物的途中,它们随时都相互传递信息,特别是好消息。
所以,在好消息的指引下,最终导致了鸟群“一窝蜂”地奔向食源,达到了在食源的群集。
粒子群算法中,解群相当于鸟群,一地到一地的迁徙相当于解群的进化,“好消息”相当于解群每代进化中的最优解,食源相当于全局最优解。
由于粒子群算法概念简单,易于实现,因而短期内得到很大发展,迅速地得到了国际计算研究领域的认可,并在很多领域得到应用,如电力系统优化、TSP 问题、神经网络训练、数字电路优化、函数优化、交通事故探测等。
本文研究的是基于连续空间的粒子群算法,主要用于对连续函数的测试。
1 改进的粒子群算法粒子群优化算法是函数优化的有力工具,其优点是收敛速度快且需设置的参数较少;但有显而易见的缺点:易陷入局部极值点,搜索精度不高。
因此当今很多学者致力于粒子群算法的改进工作。
对粒子群算法的改进主要集中在对参数的改进以及算法融合两个方面。
对参数的改进包括对惯性权值ω、学习因子1c 和2c 、每一代粒子的飞行时间等的调整。
对于算法融合方面,许多学者尝试了将粒子群算法与其他智能计算方法相融合,有结合遗传算子杂交和混合粒子群优化算法[2]、基于模拟退火的粒子群算法[3]、免疫粒子群算法[4]、基于群体适应度方差自适应变异的粒子群算法[5]、与差别进化相结合的粒子群算法[6]等。
1.1 参数的改进 1.1.1 惯性权重法Y uShi Hui 和Eberhart R [7]首次提出了惯性权重ω的概念,并发现较大的ω值有利于跳出局部极小点,较小的ω值有利于算法的收敛,故此提出了自适应粒子群算法。
速度更新公式如式(1-1)、(1-2)所示。
11122()()k kkkid k id id id gd id v v c r p z c r p z ω+=+-+- (1-1)max minmax maxk k iter ωωωω-=-⨯ (1-2)式中,m ax ω为初始惯性权重;min ω为最终惯性权重;m ax iter 为最大迭代次数;k 为当前迭代次数。
自适应粒子群算法在刚开始的时候倾向于开掘,然后逐渐转向于开拓,从而在局部区域调整解。
这是目前使用最广泛的粒子群算法形式。
但是,当待解函数很复杂时,自适应粒子群算法在迭代后期全局搜索能力不足,容易陷入局华南理工大学研究生学报2部极小点。
1.1.2 收缩因子法Clerc [8]的研究表明使用收缩因子可以保证粒子群算法收敛。
收缩因子χ是关于1c 、2c的函数,定义的公式如式(1-3)、(1-4)所示。
11122[()()]k k k kid id id id gd id v v c r p z c r p z χ+=+-+- (1-3)12,4l c c l χ==+> (1-4)Clerc 的带收缩因子的方法中设l 为4.1,故收缩因子χ为0.729。
相当于在速度更新公式中,使前次速度乘0.729。
收缩因子法可使粒子轨迹最终收敛,且可以有效搜索不同的区域,能得到高质量的解,若与此同时将每维的最大速度设置为一维搜索空间的大小,则可得到更好的效果。
但是,收缩因子法在处理单峰函数或者其它比较光滑的较为简单的函数时,比起基本粒子群算法,收敛速度稍微慢一点。
1.1.3 小生境粒子群法粒子群算法启发性强、收敛速度快,使得粒子在寻优时过分集中,最后粒子都移向全局最优点,不能用于多模态函数优化。
2002年Brits [9]等将小生境技术引入粒子群优化算法中,小生境法除去影响粒子间信息交流的“社会部分”,增强粒子局部搜索能力,每个粒子飞向离它最近的山峰,即形成小生境。
小生境粒子群算法速度更新公式如式(1-5)所示。
111()k k kidk id id id v v c r p z ω+=+- (1-5)小生境粒子群法主要应用于多峰函优化,对单峰函数效果不佳。
1.1.4 自适应调整飞行时间法基本粒子群算法在解空间搜索时,每代粒子的飞行时间恒为1,有时会导致粒子在最优解的附近来回“振荡”现象[10]。
自适应调整飞行时间法动态调整飞行时间,随着迭代代数的增加,飞行时间线性减少。
具体调整公式如式(1-6)、(1-7)所示。
1k kkidid id k z z v T +=+ (1-6)00m ax(1)k k T T k iter =- (1-7)式中,k T 表示第k 代粒子的飞行时间;0T 表示粒子最长飞行时间;0k 为比例系数,起调节作用。
自适应调整飞行时间法适用于复杂函数,最优值处在狭长或陡峭的山峰上。
但是对于简单函数后期收敛速度较慢。
1.2 算法融合Angeline[11]将选择算子引入粒子群算法中,选择每次迭代后较好的粒子复制到下一代,以保证每次迭代的粒子群都具有良好的性能,这种算法对某些单峰函数效果良好。
Lvbjerg [12]在粒子群每次迭代后,按几率在粒子间交换各维,通过交叉来生成更优秀的粒子群算法对某些多峰函数效果较好。
Higash [13]等人分别提出了自己的变异粒子群算法,基本思路均是希望通过引入变异算子跳出局部极值点的吸引,从而提高算法的全局搜索能力,得到较高的搜索成功率。
高鹰等人则引入免疫机制的概念,提高粒子群的多样性和自我调节能力,以增强粒子的全局搜索能力。
Baskar 等人提出了协同粒子群算法,通过使用多群粒子分别优化问题的不同维来对基本算法进行改进尝试。
另外,还出现了一些量子粒子群算法、基于模拟退火的粒子群算法以及求解几何约束问题的粒子群算法等。
以上改进算法各有优缺点,它们引入了一些新的参数,在改进算法性能的同时也一定程度上增加了算法的复杂性。
2 结论粒子群算法没有遗传算法和模拟退火算法成熟,在对复杂连续函数的优化上仍存在许多问题。
(1)对某些具有狭长的山峰的函数,很难求到其最优解。
有效求解较复杂的函数,将大大促进粒子群算法的发展和应用。
(2)对具有很多最优点的函数,无法求出其所有极值点,只能求出部分极值点。
如何取得所有的最优点,是函数优化的一大难题。
刘蓉: 基于连续空间的粒子群算法研究综述3(3)参数选择依赖于具体函数。
对于不同的函数,要选取不同的参数。
如何选择和设计参数,使其减少对函数的依赖,提高算法的兼容性值得研究。
可以预言,随着粒子群算法的深入研究和应用领域的拓展,粒子群算法不仅可以为函数优化研究工作带来更多的方便,而且给更多的实际应用带来新思路、新前景。
参考文献[1]KennedyJ,EberhartR.Particle swarm optimization.ProceedingsofIEEEInternationalConference on Neural Networks,Piscataway:IEEE Service Center,1995,1942-1948.[2] Angeline P J.Evolutionary Optimization V ersus particleswarm optimization[C].In:Evolutionary Programming Ⅶ,1998:601-610.[3] 高鹰,谢胜利.基于模拟退火的粒子群优化算法.计算机工程与应用,2004,1:47-50.[4] 高鹰,谢胜利.免疫粒子群优化算法.计算机工程与应用,2004,6:4-6.[5] 吕振肃,侯志荣.自适应变异的粒子群优化算法.电子学报,2004,32(3):416-420.[6] 李炳宇,萧蕴诗,吴启迪.一种基于粒子群算法求解约束优化问题的混合算法.控制与决策,2004,19(7):804-806.[7] Shi Y ,Eberhart R C.A modified particle swarmoptimizer.Proceedings of IEEE International Conference EvolutionaryComputation,Anchorage,1998,69-73. [8] Clerc M.The swarm and the queen:Towards adeterministicandadaptiveparticleswarmoptimization.ProceedingsEvolutionaryComputation,Was hington,1999:1951-1957.[9]Brits R,Engelbrchta P,Bergh F D.A niching particleswarmoptimizer.ProceedingsConf.onSimulatedEvolution andLearning,Singapore,IEEEInc,2002:1037-1040.[10]张建科.几类改进的粒子群算法.西安电子科技大学,2006年硕士论文,P19-23.[11]Angeline P ing Selection to improve Particle SwarmOptimization[A].Proceedings of the 1999 Congress on Evolutionary Computation[C].Piscataway,NJ:IEEEPress,1999:84-89.[12]Lvbjerg M,R assmussen T K,Krink T.Hybrid ParticleSwarm Optimizer with Breeding and Subpopulations [A].Third Genetic and Evolutionary Computation Conference [C].Piscataway,NJ:IEEE Press,2001. [13]Higashi N,Iba H.Particle Swarm Optimization withGaussian Mutation[A].Proceedings of the 2003 Congress on Evolutionary Computation[C].Piscataway ,NJ :IEEE Press,2003.72-89.Summary of Particle Swarm Optimization Algorithm ReseachBase On Continous SpacesLiu Rong(School of Science, South China University of Technology, Guangzhou 510640)Abstract:Particle swarm optimization algorithm is a kind of swarm intelligence-based heuristic global optimizationtechnology. Particles search through their own individual best solution and the whole particle swarm's global optimal solution to optimize the update is complete. The concept of the algorithm is simple, easy implementation, fast convergence, parameter setting small, are an efficient search algorithm.Through the study of particle swarm optimization algorithm base on continous spaces,this paper give a variety of improve forms and applications, point out the shortcomings in the various improvements, and proposed a possible directions for future research.Key words:Particle Swarm optimization Algorithm, Swarm Intelligence, Heuristic,Continous Spaces。