第2章机器人机械结构讲解
- 格式:ppt
- 大小:6.73 MB
- 文档页数:95
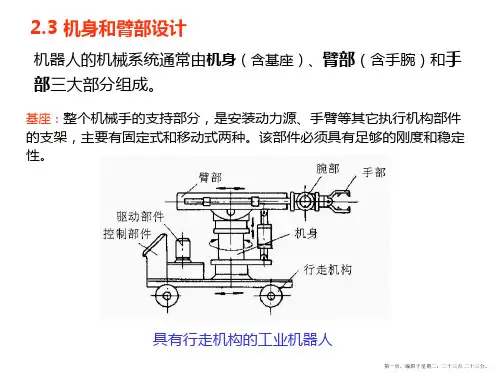
第二章机器人的机械结构机器人的机械结构是工业机器人的重要组成部分,它的结构在某方面与传统机械有相同之处,又不同于专用设备,它有自己的特点,具有较强的灵活性。
§2-1 手部结构简介工业机器人手部的特点:①手部与手腕相连处可拆卸。
手部与手腕有机械接口,也可能有电、气、液接头,当工业机器人作业对象不同时,可以方便的拆卸和更换手部。
②手部是工业机器人末端操作器。
可以像人手那样具有手指,也可以是不具备手指的手。
可以是类人的手抓,也可以是进行专业作业的工具,比如装在机器人手腕上的喷漆枪、焊接工具等。
③手部的通用性比较差。
工业机器人手部通常是专用的装置,比如:一种手爪往往只能抓握一种或几种在形状、尺寸、重量等方面相近似的工作;一种工具又能执行一种作业任务等。
④手部是一个独立的部件。
手部是工业机器人的关键部件之一,是用来抓取物件或握持工具的机构。
由于被握持工件的形状、尺寸、轻重、材质和表面状况不同,手部结构也是多种多样的,大部分都是根据特定件的要求而专门设计的。
各种手部的结构不仅形式不完全相同,而且工作原理也不一样,常用的手部,按握持原理,分为夹持和吸附式两大类。
夹持式:又称手指式,按夹持工件的部分不同,又可分为内撑式和外夹式两种。
吸附式:通常就是指吸盘式,多为气吸和磁吸两种。
外夹式平移式夹持式(手指式)原理形式分为内撑式回转式挤气式空气负压吸盘喷气式吸盘式真空式磁力吸盘一手指式手部手指式手部是由手指、传动机构和驱动装置三部分组成。
驱动装置:它是为传动机构提供动力,有液压、气动、电动三种形式。
传动机构:往往通过滑槽、斜楔、齿轮齿条、连杆等推动杠杆机构实现夹紧和松开动作。
手指:它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘、套类零件,一般情况下,多采用两个手指,少数为三指或多指。
结构形式取决于被夹持工作的形状和特征。
1 对手指式手部的基本要求:①手指握力(夹紧力)大小适宜。
为使手指能夹紧工件,并保证在运动过程中不脱落,要求手指在夹紧工作时应有足够的加紧力。

第二章工业机器人的机械结构和运动控制章节目录工业机器人的系统组成操作机控制器示教器工业机器人的技术指标学习目标导入案例课堂认知扩展与提高本章小结思考练习工业机器人的运动控制机器人运动学问题机器人的点位运动…机器人的位置控制课前回顾何为工业机器人?工业机器人具有几个显著特点,分别是什么?工业机器人的常见分类有哪些,简述其行业应用。
学习目标认知目标*熟悉工业机器人的常见技术指标*掌握工业机器人的机构组成及各部分的功能*了解工业机器人的运动控制能力目标*能够正确识别工业机器人的基本组成*能够正确判别工业机器人的点位运动和连续路径运动导入案例国产机器人竞争力缺失关键技术是瓶颈众所周知,中国机器人产业由于先天因素,在单体与核心零部件仍然落后于日、美、韩等发达国家。
虽然中国机器人产业经过 30 年的发展,形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口。
整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件——伺服电机、减速器和控制系统,相当于机器人的“大脑”)、中游机器人本体(机器人的“身体”)和下游系统集成商(国内 95% 的企业都集中在这个环节上)三个层面。
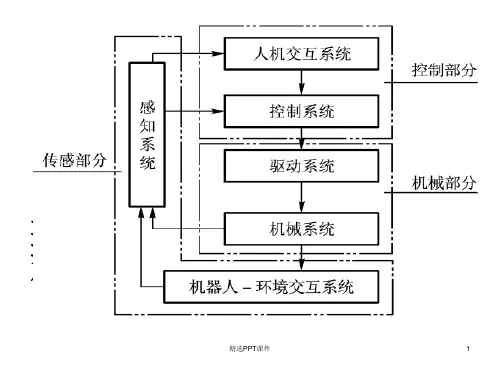
课堂认知工业机器人的系统组成第一代工业机器人主要由以下几部分组成:操作机、控制器和示教器。
对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
工业机器人系统组成操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元及内部传感器等部分组成。
关节型机器人操作机基本构造机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等。
(1) 机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
实质上是一个拟人手臂的空间开链式机构,一端固定在基座上,另一端可自由运动,由关节 - 连杆结构所构成的机械臂大体可分为基座、腰部、臂部(大臂和小臂)和手腕 4 部分。