A寻路算法
- 格式:pdf
- 大小:1.18 MB
- 文档页数:11
A*寻路算法在游戏中的应用作者:刘娜王玉芳来源:《数字技术与应用》2012年第06期摘要:寻路是游戏开发中中非常重要的一个元素,如何高效的找到一条最短的路径是游戏AI设计的基础之一,本文比较了A*算法相对于普通的深度搜索及广度搜索在路径搜索上的优势,探讨了A*算法的原理及实现以及如何在游戏中使用A*算法实现路径探索。
关键词:游戏开发人工智能状态空间搜索 A*算法中图分类号:TP301 文献标识码:A 文章编号:1007-9416(2012)06-0135-01近年来,随着游戏产业的发展,越来越多的游戏开始采用人工智能技术提高游戏的可玩性。
在游戏中,玩家操控主要角色,而其他角色的行为逻辑由人工智能操纵。
大部分游戏在开发过程中都会遇到路径探索问题:即如何快速、准确地计算出游戏角色从地图中的A点到达B 点的一条路径,优秀的寻路算法一直是游戏开发者追求的目标,同时也是人工智能基础算法之一。
1、常见状态空间搜索算法当求解一个问题时,由于求解问题的过程中分枝有很多,使得求解的路径很多,就构成了一个图,这个图称之为状态空间,问题的求解就是在这个图中找到一条路径可以从开始到结果,这个过程就叫做状态空间搜索。
常见的状态空间搜索有深度优先和广度优先,深度优先即是先按照一定的顺序搜索完一个分枝再搜索另外一个分枝,广度优先即是从起点开始一层一层向下找,直到找到目标为止。
它们在状态空间规模不大时是一个好的选择,但是它们有一个很大的缺陷就是在状态空间中穷举,当状态空间很大时,要搜索的节点数就会增长很快,效率很低,这时就需要用到启发式搜索了。
即是在搜索时对下面将要搜索的每一个位置进行价值评估,这样就可以省去大部分无谓的搜索过程从而提高搜索效率。
2、A*搜索算法启发式搜索也有很多的算法,如局部择优搜索法、最好优先搜索法等,这些算法都使用了启发函数,区别在于选取最佳搜索节点时的策略不同。
局部择优搜索法,就是在搜索的过程中选取最佳节点后舍弃其他的节点一直搜索下去。

a星算法的原理A*算法的原理A*算法是一种常用的寻路算法,用于在图形化的环境中找到从起点到目标点的最短路径。
它结合了Dijkstra算法和贪心算法的优点,能够高效地找到最佳路径。
A*算法的核心思想是通过启发式函数来评估每个节点的价值,以选择下一个要探索的节点。
这个启发式函数通常被称为估价函数,它用来估计从当前节点到目标节点的距离。
A*算法会维护一个开放列表和一个关闭列表,来存储待探索的节点和已经探索过的节点。
A*算法的具体步骤如下:1. 初始化:将起点加入开放列表,并将其G值(起点到起点的实际代价)设置为0。
2. 进入循环:如果开放列表不为空,则继续执行循环。
3. 寻找最佳节点:从开放列表中选择估价函数值最小的节点作为当前节点,并将其移出开放列表,加入关闭列表。
4. 判断是否达到目标:如果当前节点是目标节点,则路径已找到,终止算法。
5. 遍历相邻节点:遍历当前节点的所有相邻节点。
6. 更新节点:计算每个相邻节点的G值和H值(估价函数值)。
如果该节点不在开放列表中,则将其加入开放列表,并更新其父节点为当前节点。
7. 重新排序开放列表:按照节点的F值(G值加上H值)重新排序开放列表,以便下一次循环时选择估价函数值最小的节点。
8. 继续循环:回到步骤2,继续执行循环。
9. 生成路径:当目标节点被加入关闭列表时,路径已找到。
通过回溯每个节点的父节点,从目标节点到起点生成最短路径。
A*算法的优势在于它能够根据启发式函数快速找到接近最佳路径的节点,从而减少了搜索的时间和空间复杂度。
启发式函数的选择对算法的性能影响很大,一个好的启发式函数能够提高算法的效率。
然而,A*算法也存在一些限制。
首先,如果启发式函数不是一致的(也称为单调的),则无法保证找到的路径是最短路径。
其次,A*算法在遇到图形中存在大量障碍物或者复杂的地形时,可能会产生大量的节点扩展,导致算法效率下降。
为了解决这些问题,研究者们提出了各种改进的A*算法,例如IDA*算法、Jump Point Search算法等。

astar寻路算法原理
A(A星)寻路算法是一种常用的启发式搜索算法,用于在图中
找到从起点到终点的最短路径。
它结合了Dijkstra算法和启发式搜
索的优点,具有较高的搜索效率。
A算法基于图的搜索,其中每个节点表示一个状态,边表示从
一个状态到另一个状态的转移。
算法使用两个函数来评估每个节点
的重要性,g(n)表示从起点到节点n的实际代价,h(n)表示从节点
n到终点的估计代价。
A算法通过综合考虑这两个函数来选择下一个
要扩展的节点。
具体来说,A算法通过维护一个开放列表和一个关闭列表来进
行搜索。
它首先将起点加入开放列表,然后重复以下步骤直到找到
终点或者开放列表为空:
1. 从开放列表中选择f(n)=g(n)+h(n)最小的节点n进行扩展。
2. 将节点n从开放列表中移入关闭列表。
3. 对节点n的相邻节点进行检查,更新它们的g值和f值,并
将它们加入开放列表中。
A算法的关键在于如何选择合适的启发函数h(n)以及如何高效地维护开放列表和关闭列表。
合适的启发函数可以大大提高搜索效率,而高效的列表维护可以减少搜索时间。
总的来说,A算法是一种高效的寻路算法,能够在图中找到最短路径,并且可以通过调整启发函数来适应不同的问题。

浅谈寻路A算法范文寻路算法(Pathfinding)是计算机中常用的一种算法,通过图形结构中两个节点之间的最佳路径,解决了很多实际问题,如游戏中的NPC寻路、自动驾驶的路径规划等。
其中,A*算法(A-star algorithm)被广泛应用于寻路算法中,本文将对A*算法进行详细介绍。
A*算法是通过启发式算法(Heuristic Search)实现的一种寻路算法,根据估算函数(Heuristic Function)对节点进行评估,并选择具有最小开销的节点进行扩展。
A*算法的核心思想是综合考虑节点的实际开销(G 值)和预估的目标开销(H值),并选择最优节点进行。
在A*算法中,节点的开销是通过计算路径上节点的实际开销和预估开销得到的。
实际开销是指从起始节点到当前节点的移动开销,通常是节点间的距离或代价。
预估开销是通过估算函数对当前节点到目标节点的距离进行评估,常用的估算函数有欧几里得距离、曼哈顿距离等。
A*算法的具体步骤如下:1. 创建一个开启列表(Open List)和一个关闭列表(Closed List),起始节点放入开启列表。
2.从开启列表中选出具有最小开销的节点作为当前节点,并将其放入关闭列表中。
3.对当前节点的所有相邻节点进行遍历,如果该节点不可通过或者在关闭列表中,则忽略。
4.计算相邻节点的实际开销和预估开销,更新节点的G值和H值。
5.如果相邻节点不在开启列表中,将其加入开启列表,并将当前节点设置为该节点的父节点。
6.如果相邻节点已经在开启列表中,比较当前节点作为父节点时的G 值和之前的G值,如果小于之前的G值,更新节点的父节点为当前节点。
7.重复2-6步骤,直到达到目标节点或者开启列表为空。
8.如果达到目标节点,从目标节点开始回溯父节点,得到最佳路径。
A*算法的优势在于通过使用估算函数,能够快速找到目标节点,而且能够保证找到的路径是最佳路径。
同时,A*算法可以通过调整估算函数的权重来权衡的速度和路径的质量。
a*算法关于A*算法网上介绍的有很多,我只是看了之后对这个算法用c写了一下,并测试无误后上传以分享一下,欢迎指正!下面是我找的一个介绍,并主要根据这个实现的。
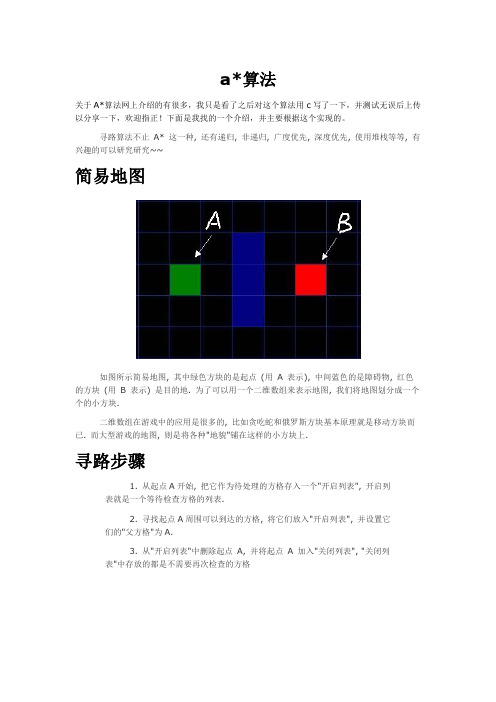
寻路算法不止A* 这一种, 还有递归, 非递归, 广度优先, 深度优先, 使用堆栈等等, 有兴趣的可以研究研究~~简易地图如图所示简易地图, 其中绿色方块的是起点(用A 表示), 中间蓝色的是障碍物, 红色的方块(用 B 表示) 是目的地. 为了可以用一个二维数组来表示地图, 我们将地图划分成一个个的小方块.二维数组在游戏中的应用是很多的, 比如贪吃蛇和俄罗斯方块基本原理就是移动方块而已. 而大型游戏的地图, 则是将各种"地貌"铺在这样的小方块上.寻路步骤1. 从起点A开始, 把它作为待处理的方格存入一个"开启列表", 开启列表就是一个等待检查方格的列表.2. 寻找起点A周围可以到达的方格, 将它们放入"开启列表", 并设置它们的"父方格"为A.3. 从"开启列表"中删除起点A, 并将起点A 加入"关闭列表", "关闭列表"中存放的都是不需要再次检查的方格图中浅绿色描边的方块表示已经加入"开启列表" 等待检查. 淡蓝色描边的起点A 表示已经放入"关闭列表" , 它不需要再执行检查.从"开启列表" 中找出相对最靠谱的方块, 什么是最靠谱? 它们通过公式F=G+H 来计算.F =G + HG 表示从起点A 移动到网格上指定方格的移动耗费(可沿斜方向移动).H 表示从指定的方格移动到终点B 的预计耗费(H 有很多计算方法, 这里我们设定只可以上下左右移动).我们假设横向移动一个格子的耗费为10, 为了便于计算, 沿斜方向移动一个格子耗费是14. 为了更直观的展示如何运算FGH, 图中方块的左上角数字表示F, 左下角表示G, 右下角表示H. 看看是否跟你心里想的结果一样?从"开启列表" 中选择F 值最低的方格C (绿色起始方块A 右边的方块), 然后对它进行如下处理:4. 把它从"开启列表" 中删除, 并放到"关闭列表" 中.5. 检查它所有相邻并且可以到达(障碍物和"关闭列表" 的方格都不考虑) 的方格. 如果这些方格还不在"开启列表" 里的话, 将它们加入"开启列表", 计算这些方格的G, H 和 F 值各是多少, 并设置它们的"父方格" 为C.6. 如果某个相邻方格D 已经在"开启列表" 里了, 检查如果用新的路径(就是经过C 的路径) 到达它的话, G值是否会更低一些, 如果新的G值更低, 那就把它的"父方格" 改为目前选中的方格C, 然后重新计算它的 F 值和G 值(H 值不需要重新计算, 因为对于每个方块, H 值是不变的). 如果新的G 值比较高, 就说明经过C 再到达 D 不是一个明智的选择, 因为它需要更远的路, 这时我们什么也不做.如图, 我们选中了C 因为它的F 值最小, 我们把它从"开启列表" 中删除, 并把它加入"关闭列表". 它右边上下三个都是墙, 所以不考虑它们. 它左边是起始方块, 已经加入到"关闭列表" 了, 也不考虑. 所以它周围的候选方块就只剩下 4 个. 让我们来看看 C 下面的那个格子, 它目前的G 是14, 如果通过 C 到达它的话, G将会是10 + 10, 这比14 要大, 因此我们什么也不做.然后我们继续从"开启列表" 中找出F 值最小的, 但我们发现C 上面的和下面的同时为54, 这时怎么办呢? 这时随便取哪一个都行, 比如我们选择了 C 下面的那个方块 D.D 右边已经右上方的都是墙, 所以不考虑, 但为什么右下角的没有被加进"开启列表" 呢? 因为如果 C 下面的那块也不可以走, 想要到达 C 右下角的方块就需要从"方块的角" 走了, 在程序中设置是否允许这样走. (图中的示例不允许这样走)就这样, 我们从"开启列表" 找出F 值最小的, 将它从"开启列表" 中移掉, 添加到"关闭列表". 再继续找出它周围可以到达的方块, 如此循环下去...那么什么时候停止呢? ——当我们发现"开始列表" 里出现了目标终点方块的时候, 说明路径已经被找到.如何找回路径如上图所示, 除了起始方块, 每一个曾经或者现在还在"开启列表" 里的方块, 它都有一个"父方块", 通过"父方块" 可以索引到最初的"起始方块", 这就是路径.以上转自/technology/archive/2011/05/26/2058842.html下面是我的代码(c):一共三个文件:Apath.h 、Apath.c 、main.c 代码中有详细注释。

A算法的实现原理及应用算法是计算机科学中重要的概念,其本质是一种数学思想,是一系列求解问题的方法和步骤。
A算法,也称为A*算法,是一种常见的寻路算法,被广泛应用于游戏开发、人工智能、机器人控制等领域。
本文将介绍A算法的实现原理及其应用。
一、A算法的实现原理A算法是一种搜索算法,其目标是在搜索图中找到从起点到终点的最短路径。
A算法基于一种启发式搜索策略,即优先考虑最有可能通向终点的节点。
下面是A算法的基本实现步骤:1. 初始化开始节点和结束节点,并把开始节点加入到开启列表中。
2. 从开启列表中选出具有最小f值(f值是节点的启发值和代价值之和)的节点作为当前节点。
3. 把当前节点从开启列表中删除,并将其加入到关闭列表中。
4. 遍历当前节点的相邻节点,如果相邻节点不可通过或者已经在关闭列表中,就忽略。
5. 对于未被遍历过的相邻节点,计算它的f值、g值和h值。
其中,g值表示从起点到该节点的代价,h值表示该节点到终点的启发值,即估算到终点的实际代价。
6. 如果相邻节点已经在开启列表中,比较新的g值和原先的g值,如果新的g值更小,就更新g值和f值。
如果相邻节点不在开启列表中,将其加入到开启列表中,并计算其f、g、h值。
7. 重复步骤2到步骤6,直到找到终点或者开启列表为空。
二、A算法的应用A算法是一种高效的寻路算法,其应用非常广泛。
下面列举几个例子:1. 游戏开发在游戏开发中,A算法被广泛用于计算游戏场景中的敌人或角色行走的最佳路径。
游戏场景通常被表示为一个二维数组,A算法可以根据玩家角色的位置和目标位置,在场景图中寻找最短路径,并输出路径。
2. 人工智能A算法是人工智能领域中常用的算法之一,可以被用于求解最优路径问题。
例如,在机器人路径规划中,A算法可以根据机器人的当前位置和目标位置,搜索机器人的最短路径,并输出路径。
3. 网络路由A算法也被广泛应用于网络路由领域。
当网络中出现路由选择问题时,A算法可以根据网络拓扑结构和路由代价,寻找到源节点到目标节点的最短路径。
astar寻路算法原理-回复A*寻路算法原理及步骤一、简介A*(A-Star)寻路算法是一种常用的路径规划算法,用于找到两个点之间的最短路径。
它综合了Dijkstra算法和贪心算法的优点,既考虑了每个节点的代价,也考虑了每个节点到目标节点的预估代价。
本文将一步一步详细介绍A*寻路算法的原理和步骤。
二、原理A*算法的核心思想是使用一个估算函数来预测从起始节点到目标节点的代价,并在遍历过程中选择最小代价节点来进行扩展。
该算法综合了代价函数和启发函数的信息,以更快地找到最短路径。
其具体步骤如下:1. 初始化将起始节点添加到一个开放列表(open list)中,开放列表存放待扩展的节点。
同时,创建一个空的闭合列表(closed list),用于存放已扩展过的节点。
2. 循环操作进入循环操作,直到开放列表为空或找到目标节点。
在每次循环中,选择开放列表中代价最小的节点进行扩展。
3. 节点扩展取开放列表中代价最小的节点,将其从开放列表中删除,并加入到闭合列表中。
然后,获取该节点的相邻节点,计算它们的代价和预估代价,并更新它们的代价值和路径。
4. 判断相邻节点对于每个相邻节点,判断它们是否在开放列表或闭合列表中。
若在闭合列表,则跳过该节点;若在开放列表,比较新路径与旧路径的代价,若新路径更好,则更新代价和路径;否则,不做任何操作。
5. 添加新节点对于不在开放列表中的相邻节点,将它们添加到开放列表中,并计算它们的代价和预估代价。
6. 重复操作重复步骤2至5,直到开放列表为空或找到目标节点。
若开放列表为空,则无法找到路径;若找到目标节点,则回溯路径,回到起始节点。
三、关键要点在上述步骤中,有几个关键要点需要注意:1. 代价函数代价函数用于计算节点到起始节点的实际代价,包括走过的距离、障碍物等影响因素。
根据具体情况,可以自定义代价函数。
2. 启发函数启发函数用于估算节点到目标节点的代价,即预测代价。
常见的启发函数有曼哈顿距离、欧几里得距离等,根据实际情况选择合适的启发函数。
此文档由网络搜集而来。
会者不难,A*(念作A星)算法对初学者来说的确有些难度。
这篇文章并不试图对这个话题作权威的陈述。
取而代之的是,它只是描述算法的原理,使你可以在进一步的阅读中理解其他相关的资料。
最后,这篇文章没有程序细节。
你尽可以用任意的计算机程序语言实现它。
如你所愿,我在文章的末尾包含了一个指向例子程序的链接。
压缩包包括C++和Blitz Basic两个语言的版本,如果你只是想看看它的运行效果,里面还包含了可执行文件。
我们正在提高自己。
让我们从头开始。
序:搜索区域假设有人想从A点移动到一墙之隔的B点,如下图,绿色的是起点A,红色是终点B,蓝色方块是中间的墙。
[图1]你首先注意到,搜索区域被我们划分成了方形网格。
像这样,简化搜索区域,是寻路的第一步。
这一方法把搜索区域简化成了一个二维数组。
数组的每一个元素是网格的一个方块,方块被标记为可通过的和不可通过的。
路径被描述为从A到B我们经过的方块的集合。
一旦路径被找到,我们的人就从一个方格的中心走向另一个,直到到达目的地。
这些中点被称为“节点”。
当你阅读其他的寻路资料时,你将经常会看到人们讨论节点。
为什么不把他们描述为方格呢?因为有可能你的路径被分割成其他不是方格的结构。
他们完全可以是矩形,六角形,或者其他任意形状。
节点能够被放置在形状的任意位置-可以在中心,或者沿着边界,或其他什么地方。
我们使用这种系统,无论如何,因为它是最简单的。
开始搜索正如我们处理上图网格的方法,一旦搜索区域被转化为容易处理的节点,下一步就是去引导一次找到最短路径的搜索。
在A*寻路算法中,我们通过从点A开始,检查相邻方格的方式,向外扩展直到找到目标。
我们做如下操作开始搜索:1,从点A开始,并且把它作为待处理点存入一个“开启列表”。
开启列表就像一张购物清单。
尽管现在列表里只有一个元素,但以后就会多起来。
你的路径可能会通过它包含的方格,也可能不会。
基本上,这是一个待检查方格的列表。
A*寻路算法(For初学者)This article has been translated into Spanish and French. Other translations are welcome.While it is easy once you get the hang of it, the A* (pronounced A-star) algorithm can be complicated for beginners. There are plenty of articles on the web that explain A*, but most are written for people who understand the basics already. This one is for the true beginner.虽然掌握了A*(读作A-star)算法就认为它很容易,对于初学者来说,它却是复杂的。
网上有很多解释A*的文章,不过大多数是写给理解了基础知识的人。
本文是给初学者的。
This article does not try to be the definitive work on the subject. Instead it describes the fundamentals and prepares you to go out and read all of those other materials and understand what they are talking about. Links to some of the best are provided at the end of this article, under Further Reading.本文并不想成为关于这个主题的权威论文。
实际上它讨论了基础知识并为你做一些准备,以便进一步阅读其他资料和理解它们讨论的内容。