扫描摆镜机构设计方法研究
- 格式:doc
- 大小:98.00 KB
- 文档页数:4

引言如今,视力障碍患者越来越多,为了矫正视力,恢复明亮,诸多人们的选择是佩戴眼镜。
庞大的市场需求刺激眼镜行业的急剧扩张。
早期,镜片的磨边是用手工的砂轮磨制,选用此种加工方法对眼镜从业人员的工作量与疲劳强度有很大的冲击,而且纯手工磨制的镜片不仅外形轮廓粗糙,而且根本无法保证瞳距、瞳高等必要的医学参数。
因此,新的工艺,新的技术被引入其中,即自动磨边机。
但是所谓的自动磨边机并不能真正实现全自动磨边,在镜片磨边之前需要根据镜架的形状来定制相应的模板,然后在磨边机上通过靠模的方式实现镜片毛坯加工成形。
这就导致每一种镜框都事先准备好模板,然后根据用户的选择使用相应的模板来磨镜片。
但是通过选择模板去磨镜片,是用户对于镜架的选择少了许多而且磨边效率和精度难以得到保证,因此需要开发数字控制磨边系统来代替现有的自动磨边机,真正实现全自动镜片磨边。
其中,镜架的扫描是最为重要的,对于镜架的内槽的扫描,从而获取轮廓参数并传递给数控磨边机从而实现加工的全自动,这样就可以缺省掉了模板的定做。
所以我们需要做的是扫描器的设计,得到一个机构小巧,测量精度高,控制简便的镜架扫描仪。
本课题是设计镜框数据测量的运动控制系统,扫描仪的结构中包含镜架的加紧机构,动作则是加紧与松开;升降机构的上升与下降;由于镜架是对称的,因此还需要一个能够横向运动的机构进行另一边的镜架的检测与复位;另外,需要一个回转机构实现镜框的扫描以及扫描仪的探头的前进和后退的控制。
众所周知,镜架的材料一般式采用塑料、板材、或者较为柔软的金属,所以,对于加紧的机构的控制对夹紧力的设置需要恰当,另外,升降台的上升高度需要十分精确,以致每次测量都处于镜框内槽的正中心。
还有,尽量减少控制按钮,在保重动作精确的前提下使操作者更加方便操作,减少操作者的工作量并且提高整个配镜的效率。
镜片磨边数控系统是光机电一体化的产物,它涉及了机械设计技术,嵌入式微控制器技术,光电检测技术,驱动与执行技术,信息技术等多方面的知识。

扫查架机构的设计扫查架机构的设计扫描架是一种用于扫描文档的设备,它可以将纸质文档转换为数字格式,以便于存储和处理。
扫描架的设计非常重要,因为它直接影响到扫描的质量和效率。
在本文中,我们将探讨扫描架机构的设计。
1. 扫描架的结构扫描架通常由以下几个部分组成:扫描头、纸张进料器、纸张输出器、控制面板和支架。
扫描头是扫描架最重要的部分,它负责将纸张转换为数字格式。
纸张进料器和纸张输出器分别用于将纸张送入和送出扫描头。
控制面板用于控制扫描架的操作,例如选择扫描分辨率和文件格式。
支架用于支撑扫描架和纸张。
2. 扫描头的设计扫描头是扫描架最重要的部分,它直接影响到扫描的质量和效率。
扫描头的设计应该考虑以下几个因素:(1)分辨率:扫描头的分辨率决定了扫描的清晰度。
一般来说,分辨率越高,扫描的清晰度越高,但扫描速度越慢。
(2)光源:扫描头的光源应该足够亮,以确保扫描的质量。
常见的光源包括LED和氙气灯。
(3)感光元件:扫描头的感光元件应该具有高灵敏度和低噪声。
常见的感光元件包括CCD和CMOS。
3. 纸张进料器的设计纸张进料器用于将纸张送入扫描头。
纸张进料器的设计应该考虑以下几个因素:(1)纸张大小:纸张进料器应该支持不同大小的纸张,例如A4、A3和信封等。
(2)纸张厚度:纸张进料器应该支持不同厚度的纸张,例如普通纸张和卡纸等。
(3)纸张对齐:纸张进料器应该能够自动对齐纸张,以确保扫描的准确性。
4. 纸张输出器的设计纸张输出器用于将扫描完成的纸张送出。
纸张输出器的设计应该考虑以下几个因素:(1)纸张堆叠:纸张输出器应该能够自动堆叠纸张,以便于后续处理。
(2)纸张排序:纸张输出器应该能够按照一定的顺序排序纸张,例如按照页码顺序。
(3)纸张保护:纸张输出器应该能够保护纸张不受损坏,例如避免纸张弯曲或折叠。
5. 控制面板的设计控制面板用于控制扫描架的操作。
控制面板的设计应该考虑以下几个因素:(1)易用性:控制面板应该易于使用,以便于用户操作。

应用于光学遥感仪器的扫描机构设计王晓旭;林冠宇;曹佃生;于向阳【摘要】针对空间光学遥感仪器扫描机构的高精度、长寿命运转需求,首先分析设计了基于油脂润滑方式的运动部件润滑与密封方法,保证了机构的运转寿命与精度;然后使用有限元方法,对扫描机构各重要组件的结构进行了分析优化,得到了轻量化的反射镜结构与优化的支撑结构.分析结果表明,在实验温度(-30~70℃)范围内反射镜的面形精度RMS值优于13.2nm;润滑与密封设计可靠,5年内润滑剂泄漏量小于3.5 mg;扫描机构总质量4.94 kg,一阶固有频率116.2 Hz.扫描机构可以满足空间光学遥感仪器的设计要求.【期刊名称】《激光与红外》【年(卷),期】2015(045)004【总页数】6页(P427-432)【关键词】扫描镜;光学遥感仪器;有限元;强度;润滑【作者】王晓旭;林冠宇;曹佃生;于向阳【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院大学,北京100049;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033【正文语种】中文【中图分类】TH122;V443+.51 引言扫描机构是很多空间光学遥感仪器接受地物光学信息的第一个环节,通常起到反射地物光学信号、扩大视场范围和增加光学系统积分时间等作用,其性能直接影响遥感系统的成像质量,是遥感仪器重要的组成部分[1]。
空间扫描机构的关键技术主要包括电机驱动技术、反射镜轻量化技术及润滑与密封设计等。
机构运转精度对成像质量有着重要影响,需要高精度电机驱动技术保证;反射镜的轻量化对于发射成本、转动精度和面形精度等各方面都有着积极作用;而润滑与密封是保证驱动机构长期稳定运行的重要保证。
本文就扫描机构的高精度、长寿命设计方法展开研究,以期指导工程实践。
目录摘要 ...............................................................................I I ABSTRACT ........................................................................I II 1 绪论 . (1)1.1引言 (1)1.2国内外研究现状与发展趋势 (2)1.3研究内容 (4)1.4研究的目的与意义 (4)2 F-Θ透镜的工作原理 (5)2.1F-Θ透镜与普通透镜的区别 (5)2.2F-Θ透镜的特点及成像特点 (6)3 F-Θ镜头的设计思想 (8)3.1F-Θ镜头基本原理 (8)3.2F-Θ透镜的参数要求 (9)3.2结构及象质要求 (10)3.3F-Θ透镜设计实例 (14)4 系统扫描线性改善方法 (24)5 结论 (20)致谢 (28)参考文献···················································错误!未定义书签。
F-θ扫描物镜的设计与研究摘要随着激光应用技术的发展,出现了形形色色的以激光为光源的光学系统。
F-θ扫描物镜是广泛用于激光打印系统、激光测径系统中的一种特殊光学系统。
激光扫描监测系统是一个动态光学系统,想要获得微米级的测量的精度,就必须采用具有良好动态特性光学系统,一般采用F-θ透镜作为扫描发射光学系统,能够很好得解决这一问题。

应用有限元优化法设计空间扫描镜结构
刘雍
【期刊名称】《科学技术与工程》
【年(卷),期】2009(009)015
【摘要】介绍了一种在空间望远镜扫描镜上使用基于有限元的多参数优化方法,进行结构设计的思路.将扫描镜需要设计的结构参数定义成设计变量,设计条件定义成约束和目标函数,使用Optistruct优化程序进行了尺寸和形状优化,计算结果能很好地满足设计要求,且灵敏度分析结果可为进一步设计修改提供参考.
【总页数】4页(P4527-4530)
【作者】刘雍
【作者单位】中国科学院上海技术物理研究所,上海,200083
【正文语种】中文
【中图分类】TP391.72
【相关文献】
1.大型工程结构的有限元动力模型优化法 [J], 陈木兰;宋海平
2.普通扫描电子显微镜、环境扫描电子显微镜和激光共聚焦扫描电子显微镜在组织工程学中的应用 [J], 傅炀;吴序嘉;祁少海;陈蕾
3.体位优化法与常规法在下颌骨 CT 扫描中应用比较 [J], 王树勇
4.基于自适应有限元的双向渐进结构优化法 [J], 王思文;陈敏志;张旭明
5.激光雷达扫描反射镜结构有限元分析 [J], 张文博
因版权原因,仅展示原文概要,查看原文内容请购买。
一种光机扫描机构的设计曹德华【摘要】光机扫描机构是各种航天航空遥感扫描成像系统的重要组成部分,而扫描镜及转动轴系又是其关键因素.从实际工程应用出发,着重论述一种大尺寸扫描镜的制备工艺以及光机扫描机构转动轴系的设计及校核方案,提出了一种45°平面反射镜扫描机构的关键实现技术和解决方案,经检验该方案切实可行.%Optical-mechanical scanner is an essential part of various remote sensing scanning and imaging systems for aerospace. Moreover, scanning mirror and rotational axis are the critical factors of the scanner. From the point of view of application, the preparation procedures of a large size scanning mirror and the scheme of design and calibration for rotational axis systems in optical-mechanical scanner were discussed. A kind of key implementation technology and solution for scanners with 45° plane mirror is proposed. The scheme was proved feasible by inspection..【期刊名称】《红外技术》【年(卷),期】2016(038)003【总页数】4页(P193-196)【关键词】光机扫描机构;扫描镜制备;轴系设计【作者】曹德华【作者单位】中国电子科技集团公司第50研究所,上海 200331【正文语种】中文【中图分类】TN958光机扫描机构是各种航天航空遥感扫描成像系统的重要组成部分,扫描驱动装置驱动扫描镜实现对目标的扫描成像,以获取目标信息[1]。
一种扫描转镜的结构设计摘要:随着人类社会的发展和时代的进步,对天气状况的预测要求也越来越高,激光雷达使微波雷达的重要补充,可以高精度、实时测量大气风场。
扫描转镜是激光雷达的重要组成部分,实现激光在伺服系统控制下按要求的方位和俯仰转动的机械装置。
本文设计了一种结构紧凑、密封性好、重量轻的扫描转镜,文中详细描述了该扫描转镜的结构特征,计算了其传动系统的相关参数,并通过有限元软件对其主要结构件进行力学仿真分析。
文中所述扫描转镜对激光雷达设计具有指导意义。
关键词:扫描转镜;驱动力矩;传动系统;风力矩。
One Structure Design Of Rotating Scan MirrorHE Yonghong,JIA Jian(Nanjing NRIET Industrial Co.,Ltd.,Nanjing 211100,China)Abstract:With progress of human society and development of time,the demand of weather forecast is more and more exactitude.The laser radar can survey wind more exact in real time which is a most important complementarity of microwave radar.The rotating scan mirror is an important part of laser radar,which is a mechanical device to realize the required azimuth and elevation rotation of laserunder the control of servo system.In this paper a rotating scan mirror with compact structure,good sealing and light weight is designed,the structural characteristicsare described in detail,the relevant parameters of its transmission system are calculated,and the mechanical analysis of the main structural parts is carried out.Key words:rotating scan mirror;driving moment;transmission system;wind moment引言目前,由于微波雷达不具有晴空探测能力,而激光测风雷达由于相对于微波来说波长较短,大气的后向散射强。
结合面阵成像的摆镜扫描系统设计研究袁野;裘俊;王智磊;周世宏【摘要】为实现低轨卫星对地面热点区域快速、大范围的成像侦查,对面阵成像摆镜扫描系统的设计进行了研究.基于反射镜摆动扫描展宽相机视场的原理,根据卫星轨道高度、地面分辨率,确定扫描系统采用阶梯式的步进扫描,要求摆镜快速摆动快速稳定.给出了摆镜扫描系统的组成、技术指标和构型,采用TRUM-60旋转行波超声电机作为驱动电机.对设计的摆镜系统建立虚拟样机模型进行仿真,设计的摆镜模态满足系统使用要求.用AD-AMS软件对摆镜系统进行动力学仿真分析,摆镜单步运动满足50 ms快速摆动、50 ms快速停止稳定成像的要求;1个运动周期内摆镜的运动状况与设计要求一致,前1 000 ms内完成10次快摆快稳的步进扫描,回程用时少于200ms,完成1行扫描的时间充裕.设计的摆镜扫描系统能完成面阵扫描,实现宽幅成像.【期刊名称】《上海航天》【年(卷),期】2016(033)006【总页数】6页(P72-77)【关键词】摆镜;面阵成像;快摆;快稳;阶梯式步进扫描;超声电机;单步运动;运动周期【作者】袁野;裘俊;王智磊;周世宏【作者单位】上海卫星工程研究所,上海201109;上海卫星工程研究所,上海201109;上海卫星工程研究所,上海201109;上海卫星工程研究所,上海201109【正文语种】中文【中图分类】V447.1目前航天侦察主要通过低轨卫星实现。
虽然卫星有广阔的视野,但由于种种技术原因,对地较高分辨率侦察还是“烟囱”式的,卫星对全球态势感知的效能未充分发挥。
逐渐成熟的面阵成像技术可在一次曝光时间内对一片区域以较高分辨率成像,大幅提高对地遥感侦察效率。
该技术与摆镜扫描机构结合,将沿卫星轨迹垂直方向进行点扫描成像提升为面推扫成像,并与反射镜横向摆扫结合获取二维较高分辨率的宽幅图像。
这种卫星载荷可较好地满足在地面突发情况下的遥感需求,利用此遥感卫星可对热点区域进行快速大面积的详细侦察[1-4]。
一种热像仪扫描器凸轮扭簧机构的设计方法研究
摘要:对扫描摆镜的驱动机构进行了研究。
热像仪扫描摆镜通常采用锯齿波形运动曲线,扫
描频率和效率取决于回扫间隔时间。
在采用凸轮扭簧机构驱动的某热像仪扫描器设计方案
中,利用简谐振动模型来分析摆镜的回复运动过程,并得出了实现快速回扫所需要的角频率
临界值。
关键词:热像仪、扫描器、凸轮扭簧机构、锯齿波、简谐振动
Study on a spring mechanism of IR Scanner
He Shi, Shen Yu,He Shiwei
Abstract: The mechanisms of scanning mirror were studied. The zigzag function curve of scanning movement is often used in thermal image, so the performance and frequency of scanning is limited by the delay time of returning movement. A cam-spring mechanism was used in a design of scanner, which dynamic character can be described with a model of harmonic vibration, and there is critical frequency determine the returning speed.
Key words: Thermal Image、scanner、cam-spring mechanism、zigzag 、harmonic vibration 引言
扫描摆镜也有称为振动镜,因为从直观上看其工作方式是通过反射镜快速的振动实现扫描,但在某些慢速扫描的系统中,由于扫描频率比较低,称其为摆动似乎更准确一些。
无论
如何,其运动方式都必须符合光机扫描的要求,尤其是保证扫描的线性度和扫描效率。
目前
的高性能热像仪中,扫描摆镜的驱动方式主要靠力矩电机直接驱动摆镜,直驱方式可以达到
很好的控制精度,扫描器结构也简单,但这种驱动方式对电机的驱动能力要求极高,同时摆
镜的面积和转动惯量也必须严格控制。
然而,在一些特殊的热成像系统中,扫描摆镜不可能很小,为了驱动较大尺寸的扫描摆镜,可以采用凸轮和扭簧机构。
凸轮扭簧机构的特点是:
驱动电路相对简单,零件加工技术成熟,凸轮的助力作用允许采用小力矩的电机,但由于机
构运动相对复杂,扫描精度相对较低,另外,凸轮在高速转动时磨损较大,要考虑润滑方式。
1.扫描摆镜的运动方式
根据扫描器对物空间的解析方式,要求摆镜按照特定的时间——位移曲线运动,横坐标为时间t;纵坐标为摆镜的角位移θ。
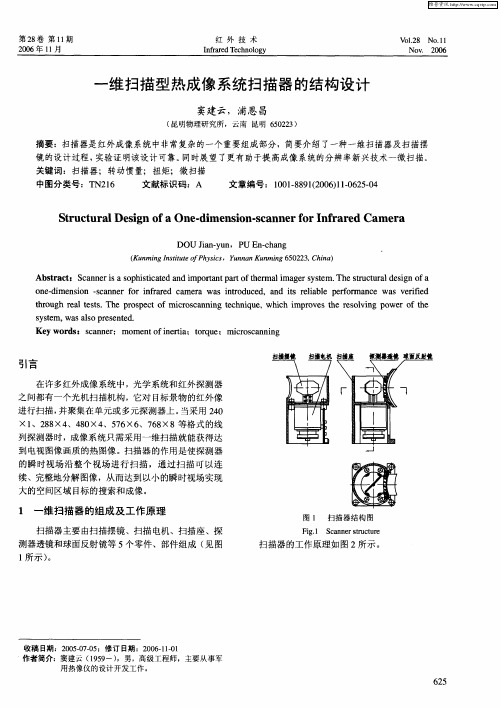
在第一代热成像技术中,由于探测器像元数量的限制,
主要用于实现帧扫瞄,最理想的运
动曲线是阶梯形的,如图1-a所示,
行扫描在每个阶梯的平台时间内
进行。
这种跳步式的运动可以避免
行扫描线的微小倾斜,但由于视频
成像的帧速率很高,摆镜在高速摆
动中很难实现阶梯型的运动曲线,
所以一般采用锯齿波形曲线,如图
1-b所示。
随着技术的发展,目前
的探测器已经具有足够多的像元,
只需一维光机扫描即可成像,摆镜
式扫描器被用于行扫描,在这种使
用条件下,最理想的扫描曲线就是
锯齿形。
实际上,扫描摆镜的运动不可能完全吻合理想锯齿形曲线,因为在图中锯齿尖端处曲线不连续,摆镜的角加速度达到了无穷大。
即使驱动元件的能力很强,实际的运动曲线可能类似于图1-b 中的虚线,尖端处变成了连续的曲线。
由于探测器的信号采样是等间隔的,为了保证扫描的线性度,只能在每个摆动周期中曲线斜率为常数的区段进行信号的采样,即图1-b 中t 1~t 2的区间内,而这一斜率常数即为摆镜的扫描角速度。
在使用凸轮扭簧驱动的扫描机构中,扫描精度决定于凸轮上升段的轮廓精度和电机的转速是否稳定。
除去有效扫描的区段,图中t 0~t 1的区间称为回扫间隔,按照扫描效率的定义:
%
1001
2∙-=
T
t t η 或 %
100]1[0
1∙--
=T
t t η
所以,为了使扫描效率尽量提高,在每个扫描周期中,摆镜的回扫间隔必须尽量缩短。
,而回扫间隔的长短决定于回复扭簧的扭矩系数和凸轮的下降曲线。
2.扫描摆镜的凸轮扭簧机构方案
在某型号的红外成像系统中,需要进行二维空间扫描,采用凸轮和扭簧机构实现锯齿波帧描,帧频sc f 为20Hz ,扫描角度sc θ为±1º,扫描效率η=80%。
显然,对于单曲线轮廓的凸轮,转速等于于帧扫频率,20rad/s ,即1200rad/min 。
这样的转速对于凸轮机构已经很高,为保证凸轮滚子在整个转动周期中能够始终与凸轮轮廓接触,需要提高回复扭簧的刚度,否则在凸轮机构的下降行程中,从动的凸轮滚子跟不上凸轮的转速而发生跑飞现象,就破坏了扫描曲线的形状。
但若回复扭簧扭矩系数(弹性系数)过大,过多的压紧力会使凸轮外轮廓和转轴的冲击和磨损加重,电机负载增大,带来不利影响。
基于上述两方面的原因,必须合理设计扭簧的扭矩系数,使凸轮滚子在下降过程中凸轮轮廓保持接触,但又不增加过多的压紧力。
凸轮轮廓曲线的设计可根据参考文献[2]或[3]中的介绍进行。
本文主要分析对回复扭簧扭矩系数的设计思路。
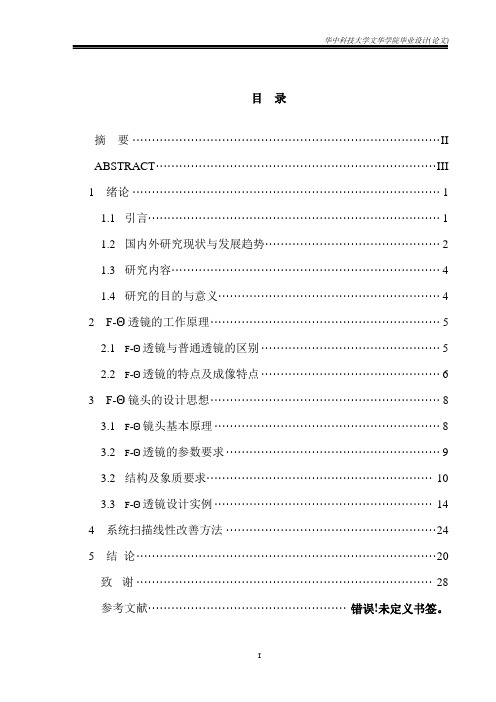
根据受力分析,摆镜在回复扭簧的作用下的自由回弹转动可简化为如图2所示模型。
图中1为凸轮和电机组合;2为摆动反射镜;3是回复扭簧。
在凸轮转到最高点后,摆镜在扭簧的回复力作用下回复转动,如果凸轮转动速度超过某临界值,下降过程中凸轮与滚子间就会脱离接触。
摆镜的转动规律可由如下微分方程描述:
R
st
M c k J --+-=∙θδθθ )(
上式(1)中,
J:摆镜相对与转动中心O 点
的转动惯量;
K:回复扭簧的扭矩系数; C:系统的粘阻系数;
st δ:弹簧的预压缩角度;
θ:摆镜的摆动角度;凸轮转到最高点的摆角为零,弹簧扭紧方向为正向;
θ
:摆镜的角加速度。
在本方案中,由于空气粘滞阻力和转动摩擦阻力矩都很小,为简化计算可以忽略式(1)中是后两项。
令J
k =
20
ω
(2),则式(1)可化简为:
02
02
0=++st
δωθωθ
(3),
根据微分方程理论,式(3)的通解具有以下形式:
st t A δϕωθ++=)sin(0 (4)
, 式中A , ϕ是积分常数,可由初始状态确ω定。
2
2
)
(
ωθ
θ +=
A
;0
00arctan
θθωϕ
=。
根据式(3),摆镜的运动方式理论上是以st δ为中心,以A 为振幅的简谐往复运动。
由于凸轮轮廓的限制,摆镜的时间—位移曲线如图3所示。
为了尽量减少凸轮与滚子间的压紧力,应使简谐振动的中心O ’与凸轮拐点重合,st δ=0。
在这种情况下,t 1时刻位于简谐振动的半周期过零位置,最短回扫间隔t 1-t 0由t 0时刻摆镜的转速0θ 、角度位置0θ以及简谐振动的固有频率0ω所决定。
函数式为:πθθωω=+0
0010arctan t (5),
显然,在本方案中,由于扫描周期、扫
描效率以及扫描角度已经确定,所以式(5)中的系数均为已知:
rad 035.020≈=
θ;
s rad t t /875.0)/(1200≈-=θθ ;
s f T sc sc 05.020/1/1===;
s T t sc 01.0)8.01(05.0)1(1=-⨯=-=η将上述参数代入(5)式,采用迭代法可求得比较
精确的5505.1710≈ω。
如果在工程设计中只要求概略的计算,因为
00
00≥θθω ,所以
2
arc tan
00
00πθθω≤
≤ ,即1012t t πωπ≤
≤。
为了保证回扫速度,防止凸轮滚子跑飞,保守一点的设计可选用1
0t πω≥;如果想尽量降低凸轮接触面的压力,以减轻电机负载,可选用
1
02t π
ω≥。
为设计扭簧,必须计算扭矩系数,根据式(2)可得2
0ωJ k =。
得到扭矩系数
后就可根据参考文献[2]中的介绍的方法设计扭簧,在此不做详述。
摆镜的转动惯量J 可利
用三维CAD 软件在设计中获得,目前三维CAD 技术已经普遍采用,具体计算方法可借助软件使用手册。
3结语
综上所述,在凸轮扭簧机构具体的设计中,对扭矩系数进行校核计算,使它与摆镜构成振动系统满足固有频率ω0略大于临界值,这样可保证摆镜的回扫速度,同时尽量减少凸轮与滚子之间的压力。
尤其对于凸轮转速较高的系统,充分考虑弹性回复系统的固有频率特性是比较重要的。