基于SPCA563B芯片的图象识别系统设计
- 格式:doc
- 大小:259.00 KB
- 文档页数:10

题目九:色彩识别装置设计要求:设计一个装置,对30cm左右的一张有色纸,装置能够在自然光或者辅助光配合下,识别出有色纸的颜色,并用汉字显示出来。
装置的识别效果的衡量,以与肉眼识别吻合为佳。
题目分析:本题要求设计一个色彩识别装置,该装置能够在自然光或者辅助光源的配合下,识别出一定距离(30cm)内的有色纸的颜色,并可以在屏幕上将识别结果用汉字显示出,颜色的承载体是纸张,颜色环境相对简单,色彩的辨别以人眼识别的为准(非CIE色度学颜色),可采用ColorChecker 卡24种颜色作为参照标准。
在许多应用中,颜色的辨别具有重要作用,如材料、工业自动化、遥感技术、图像处理、产品检测,还是某些模糊的探测技术都需要对颜色进行探测。
通过传感器或CCD/CMOS图像传感器检测进而识别颜色是两种常见的检测手段。
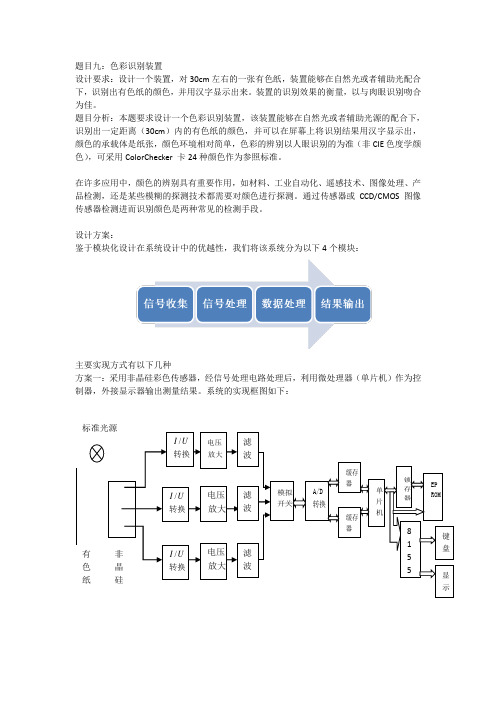
设计方案:鉴于模块化设计在系统设计中的优越性,我们将该系统分为以下4个模块:主要实现方式有以下几种方案一:采用非晶硅彩色传感器,经信号处理电路处理后,利用微处理器(单片机)作为控制器,外接显示器输出测量结果。
系统的实现框图如下:方案二:利用CCD/CMOS传感器,将采集的数据输入到计算机,通过软件进行分析,在屏幕上输出结果,典型的方案是将数码相机(或者摄像头)采集的数据传输到计算机,通过软件Matlab 编写模糊神经网络程序进行分析。
方案三:选用Photo sensor颜色信号进行提取和采集,采用基于人工神经网络的高速并行模数转换模式进行数据的模数转换,嵌入式系统对数据进行处理,完成筛选和分拣工作,系统结构如图所示.方案四:利用可编程彩色光到频率的传感器TCS230进行信号的收集与处理,单片机SPCE061A 进行数据的分析处理,并将结果通过显示输出电路输出。
方案比较:方案一是目前常用的,颜色传感器通常是在独立的光电二极管上覆盖经过修正的红绿蓝滤光片,然后对输出信号进行相应的处理,输出的是模拟信号,需要A/D电路进行采样、转换,才能被微处理器识别,增加了电路的复杂性,存在较大误差,影响了识别效果。
第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段20世纪50年代是智能车辆研究的初始阶段。
1954年美国Barrett Electronics公司研究开发了世界上第一台自主引导车系统AGVS (Automated Guided Vehicle System)。

图片操作的手势动态识别系统作者:陈守满朱伟王庆春来源:《现代电子技术》2012年第22期摘要:为了实现图片操作命令的手势输入,设计了图片操作的手势动态识别系统。
系统以ARM(S3C6410)为硬件处理核心,利用数字图像处理和嵌入式视觉技术,由摄像头捕捉帧图像,经OpenCV技术处理识别后,发出相应命令,操作显示屏上的图片,实现了对图片非接触式的缩放和切换操作等功能。
进行实验测试,取得了良好的效果,所提出的设计思想为手语输入、机器人视觉输入的方案设计提供了参考。
关键词:手势识别;图片操作;ARM;OpenCV;QT/E中图分类号:TN91934;TP391.4 文献标识码:A 文章编号:1004373X(2012)22000403数字图像处理技术是将获得的低质量图像利用计算机处理成更适合人眼观察或仪器检测的图像的技术[1]。
嵌入式视觉技术是使用摄像机和计算机代替人眼对目标进行识别、跟踪和测量的技术[2]。
因此。
数字图像处理技术和嵌入式视觉技术被广泛地应用在基于图像的识别控制系统中[38]。
当前人机交互的主要信息输入方式有键盘输入、鼠标输入、触摸屏输入、语音输入、视觉输入。
对于鼠标、键盘和触屏输入方式,信息输入者需要接触输入设备,而语音输入和视觉输入不需要接触输入设备。
语音输入对特定语音识别率较高,非特定语音输入识别率低,因此语音输入普适性差;基于视觉的输入通过摄像头捕捉手部运动,将手语转换成对应的命令,实现手势输入,这就可以让人摆脱人机交互时接触的限制。
本文介绍了一种基于ARM的操作图片的手势动态识别系统,利用数字图像处理技术和嵌入式视觉技术,通过摄像头捕捉手势动态来操作显示屏上的图片,实现以非接触的方式对图片进行放大、缩小、切换等操作。
1系统硬件架构如图1所示,手势动态识别的硬件系统主要由ARM S3C6410处理器、USB摄像头、USB控制器、LCD控制器、存储器控制器等组成。
系统由摄像头获取手势动态的图片,经过S3C6410处理判断操作者意图,对显示屏的图片进行操作。

人工智能中图像识别技术的发现与应用研究
李丽亚
【期刊名称】《长江信息通信》
【年(卷),期】2022(35)1
【摘要】在经济全球化背景下,我国科学技术有了突飞猛进的发展。
人工智能的发展让世界瞩目。
在人工智能技术中,图像识别作为技术的核心,在各个领域总得到了
广泛的应用,为现代生活带来了极大的便利。
本文首先对人工智能中图像识别技术
基本概念做出基本叙述,其次是图像识别技术的技术原理与组成原理,然后对图像识
别技术优势与应用路径进行深入的分析,最后是对人工智能图像识别技未来的展望。
【总页数】3页(P134-136)
【作者】李丽亚
【作者单位】太原工业学院
【正文语种】中文
【中图分类】TP308
【相关文献】
1.基于人工智能的图像识别技术在抽水蓄能电站中的应用研究
2.基于人工智能的图像识别技术在抽水蓄能电站中的应用研究
3.图像识别技术及其在人工智能领域半
导体芯片拉力测试的应用研究4.人工智能中图像识别技术的发展与应用研究5.人
工智能中的图像识别技术分析
因版权原因,仅展示原文概要,查看原文内容请购买。
交互系统中图像识别的硬件实现
肖明尧
【期刊名称】《应用能源技术》
【年(卷),期】2009(000)010
【摘要】阐述了图像识别在交互系统中所能起到的作用,利用SPCE061A作为微处理器和控制板。
配合CMOS传感器SPCA561A、图像处理芯片SPCA563A将光学镜头传输过来的物体的颜色,形状和位置的信息进行处理并以互动的形式反馈给用户。
本文主要说明交互系统中图像识别系统硬件设计与实现
【总页数】2页(P45-46)
【作者】肖明尧
【作者单位】长春师范学院,长春130032
【正文语种】中文
【中图分类】TP316
【相关文献】
1.基于DM642的嵌入式可见光图像识别系统硬件设计与实现 [J], 陈沛然;张晓霞;王祥斌;王仕超;周勇;冷洁
2.《计算机硬件组装》仿真交互系统的设计与实现--基于Flash的多媒体课件制作[J], 徐乐真
3.基于图像识别的大屏幕人机交互系统建设与实践 [J], 李厚恩;余里程;廖耀隆
4.基于图像识别的大屏幕人机交互系统建设与实践 [J], 李厚恩[1];余里程[1];廖耀
隆[1]
5.改进神经网络的图像识别系统设计与硬件实现 [J], 魏东;董博晨;刘亦青
因版权原因,仅展示原文概要,查看原文内容请购买。
基于芯片实现图像识别算法的研究随着人工智能技术的发展,图像识别技术已经逐渐成为一个热门领域。
图像识别技术可以对图像中的目标进行自动识别,对于增强人类生产和生活效率具有重大意义。
而基于芯片实现的图像识别算法研究,则可以在硬件层面提升图像识别速度、降低功耗和成本,是一个研究趋势。
一、基于芯片的图像识别算法的意义基于芯片的图像识别算法的研究,对于图像识别技术的发展具有重要意义。
首先,图像识别技术可以应用于各个领域,包括智能家居、智能交通、医疗保健等。
基于芯片的图像识别算法研究可以有效降低硬件成本,提升系统的可扩展性和性能,从而进一步推动图像识别技术的发展。
其次,基于芯片实现图像识别算法可以提高算法的效率和速度,实现快速的图像数据处理和识别,从而在实际应用过程中提供更好的用户体验。
二、基于芯片的图像识别算法的技术路线基于芯片的图像识别算法研究的技术路线主要包括芯片设计、算法设计和系统实现三个方面。
1. 芯片设计芯片设计是基于芯片的图像识别算法研究的重要环节。
芯片设计需要考虑芯片的性能、功耗、面积、成本等方面的因素。
一些关键的设计技术包括电路设计、布局设计、封装技术等。
同时,芯片设计还需要考虑算法的特点和要求,以实现最佳的性能和功耗平衡。
2. 算法设计算法设计是基于芯片的图像识别算法研究的另一个重要环节。
算法设计需要考虑准确性、鲁棒性、适应性等方面的因素。
一些常用的算法包括卷积神经网络、深度学习等。
同时,算法设计也需要充分考虑芯片的特点和能力,以实现最佳的性能和能效平衡。
3. 系统实现系统实现是基于芯片的图像识别算法研究的最终环节。
系统实现需要融合芯片设计和算法设计的成果,实现整个系统的集成和测试。
同时,系统实现还需要考虑系统的稳定性、可靠性、可扩展性等方面的因素,以满足实际应用需求。
三、基于芯片的图像识别算法的应用基于芯片的图像识别算法研究已经在各个领域得到广泛应用。
以下是一些常见应用案例:1. 智能家居基于芯片的图像识别算法可以应用于智能家居领域,实现家居设备的自动化控制。
专利名称:一种图像识别方法和装置专利类型:发明专利
发明人:沈操
申请号:CN201810431353.5
申请日:20180508
公开号:CN108764068A
公开日:
20181106
专利内容由知识产权出版社提供
摘要:本发明公开一种图像识别方法,包括:根据每个图像的特征生成一个对应的特征向量;将所有特征向量两两成对比较,计算每两个特征向量的相似度;筛选相似度高于设定值的图像对,并将保留的图像对按照相似度进行排序,本发明还公开了一种图像识别装置。
本发明提供了学员运用在线教育系统时的身份验证和教学过程中是否是学员本人的检测功能,在图像识别过程中提取图像特征,并通过特征向量间的距离来确定图像间的相似度,比较过程中逐步删除相似度较小的图像来简化计算,识别效率高,节省计算量,提高识别速度,节省存储空间。
申请人:北京大米科技有限公司
地址:100142 北京市海淀区西四环北路158号1幢9层9071号
国籍:CN
代理机构:北京正理专利代理有限公司
代理人:付生辉
更多信息请下载全文后查看。
基于SPCA563B芯片的图象识别系统设计
作者:上海交通大学李文昊来源:单片机与嵌入式系统应用点击数:983 更新时间:2008-6-18 您可以添加到网摘让更多人关注此文章:
单片机SPCA563B是凌阳科技公司推出的一颗用于图象识别领域的IC,不仅具有一般单片机的控制功能,而且具有图象识别与处理能力,本图象识别系统就是以它为核心
进行数据处理与控制,该系统已实现的功能有:物体颜色和形状识别,字符识别以及手势识别等,利用这些识别的结果,可以开发游戏、趣味教学、智能玩具、文字输入以及智能识别等应用系统。
本文通过介绍整个系统以及在整个系统上实现的简单的手势识别,使大家更好地了
解此系统在图象识别和文字识别方面的强大功能和易用性。
1 系统硬件架构
如图1所示,图象识别硬件系统主要由SPCA563B单片机、USB控制器、图像传感器、存储器控制器和语音输出控制器等组成。
1.1 SPCA563B单片机
SPCA563B单片机的硬件特征如下:提供320×320的8位CMOS图像传感器接口,具有自动白平衡和获得参数控制功能,具有图像颜色校正和图像Gamma校正功能,具有7种颜色过滤功能,具有良好的减小噪声和滤波器,能够在一张图片中检测到21个目标物体的大小和位置,并将其结果存放于嵌入在CPU内部的RAM中;16位μ inSP CPU 内核,内嵌1K×16位的RAM和32K×16位的ROM;具有可选择的外部RAM和ROM接口,具有USB1.1的接口;3.3V电压供电,128/64脚LQFP封装(其中128脚有可选择的并行接口,48脚则没有)。
此系统采用48脚的LQFP封装,其硬件电路如图2所示。
1.2 USB控制器
SPCA563B内嵌USB1.1的控制器,利用USB接口可以与PC进行通信,结合PC端软件来实现ISP及在线调试程序,此外可以利用USB来为系统供电,其电路如图3所示。
1.3 图像传感器
本系统采用SPCA3010A CMOS图像传感器,图像输出为QVGA(320×240)大小的RGB格式,SPCA563B通过I2S接口来控制SPCA3010A CMOS图像传感器,此CMOS图像传感器支持stand by省电模式,其电路如图4所示。
1.4 存储器控制器
外扩SPR4096A Flash存储器,主要用来存储系统需要的语音数据,SPR4096A Flash具有如下特征:512K×8位的存储空间;内嵌4K×8位的SRAM;外部CPU可以通过串行接口或8位并行接口来访问Flash/SRAM;I/O接口的电压范围为2.25-3.6V,并支持stand by的省电模式,在数据存储量比较小的情况下,用SPR4096A可以大大降低系统的成本,电路如图5所示。
2 系统软件设计
本图象识别系统的识别功能主要通过软件系统来实现,为了提高程序的可移植性。
为将来该系统功能扩展预留空间,整个软件系统采用分模块、分层次的方法编写程序,采用汇编语言实现对寄存器的读/写以及对中断的控制,并为上层的开发提供灵活的接口,上层采用C语言编写,通过调用底层函数来间接对硬件资源进行操作,这样编写程序使整个系统结构清晰,程序可移植性和可扩展性增强,而且占用硬件资源少,为系统功能的扩展和进一步开发预留充分的空间。
整个软件系统由主程序,图象识别功能模块子程序、中断服务子程序和语音输出子程序等组成,主程序负责整个系统的协调和控制工作,通过调用不同的子程序来实现不同的功能,主程序流程如图7所示。
为突出系统的特点,下面通过手势识别的实例来重点描述图象识别原理,手势识别包含两个步骤:手形的轮廓跟踪,提取其轮廓的相关数据,手势的识别,在上一步得到的数据的基础上进行分析判断而得到结果。
2.1 轮廓跟踪算法实现
轮廓跟踪的目的是获得图像的外部轮廓特征(包括目标物体边缘点的坐标和方向),为图像的形状分析做准备,SPCA563B的DSP针对肤色有一系列的颜色处理,这样系统就可以方便图像转化为肤色与非肤色的二值图像,通过对暂存在SRAM中的二值图像进行数据分析,来提取手形的边缘轮廓。
轮廓跟踪算法步骤如下:
1)按从上到下,从左到右的顺序扫描图像,寻找第一个非白象素作为边界起始点A[0],记录A[0]点的坐标(A[0],x,A[0],y)。
A[0]是具有最小行和列值的边界点,再定义一个扫描方向变量dir。
该变量用于记录上一步中沿着前一个边界点到当前边界点的移动方向,其初始化取值为A[0],dir=7;扫描方向定义如图8所示。
假设当前的坐标为(x,y,则其8个邻域坐标如下:
方向0:(x+1,y);方向1:(x+1,y-1);
方向2:(x,y-1);方向3:(x-1,y-1);
方向4:(x-1,y);方向5:(x-1,y+1);
方向6:(x,y+1);方向7:(x+1,y+1)。
2)按逆时针方向搜索当前象素的3×3的邻域,其起始搜索方向设定如下:
若A[n-1],dir为奇数,则取(A[n-1],dir+7)mod 8;
若A[n-1],dir为偶数,则取(A[n-1],dir+6)mod 8。
在3×3邻域中搜索到的第一个与当前象素相同的象素便为新的边界点A[n],同时更新记录从上一点搜索到边界点A[n]的方向变量A[n].dir,记录新的边界点的坐标(A[n],x,A[n],y)。
3)如果边界点A[n]等于第一个边界点A[0],即(A[n],x==A[0],x&&A[n],y==A[0],y)。
停止搜索,结果跟踪,否则重复步骤2。
由边界点A[0]、A[1]、A[2]、…、A[n]构成的边界便为要跟踪的边界。
2.2 手势识别算法实现
我们的主要目的是找出伸出手指的个数,开使用行扫描的方法通过行内从0→1或1→0黑白象素变化的次数来确定伸出手指的个数,但这种算法对于倾斜一定角度的手指数目判断存在一定问题,因此转而采用"提取指尖点算法"。
提取指尖点的方法着眼于从手势轮廓中搜索出指尖点,一个指尖点对应于一根手指,最后根据得到指尖点的个数来判定手指数目,判断是不是指尖;
分析手的形状,手指的两边基本上是平行的,一直按逆时针方向前进,每经过一次指尖,手形轮廓的走向发生反向的变化,由于手形轮廓的边缘存在一定的毛刺,因此可以用多点方向的平均来减小毛刺的影响,这里取36点方向的平均,表示为Average_dir[i]。
是否经过指尖的判
断条件1:126<=|Average_dir[i-1]-Average_dir[i+1]|<=162,(说明:两点方向相反,其方向值差4,3.5×36=126,4.5×36=162。
)
再分析手的形状,两手指之间边缘轮廓的走向也满足判断条件1,故必须添加判断条件,如图10所示,当沿着一个方向搜索手的边缘轮廓时,经过指尖走向一定与手指间缺口走向相反,因此,必须假设判定条件2:
Is_FingerVertex(dir0,dir1,dir2);
这个函数是用来通过连续3点的方向来判断这3点是否为逆时针走向,由于是沿着逆时针方向搜索边缘轮廓的,故在判定条件1成立的前提下加上
Is_FingerVertex(Average_dir[i-1],Average_dir[i],Average_dir[i+1]就可以判断是否为指尖,从而判定手指的数目,顺序3点是否为逆时针走向,具体在程序中可以构造一个循环队列来实现,测试结果表明这种算法非常稳定。
结语
SPCA563B内部嵌入功能强大的图像颜色处理的DSP,用它来做图象识别系统的主控芯片十分方便、快捷。
同时该系统具有语音输出提示功能,操作更加人性化,并且可以通过USB1.1接口与PC进行通信,配合PC端的调试工具,还可以大大缩短图象识别功能开发的周期。