水下选通式激光成像中的脉宽与选通时间匹配设计
- 格式:docx
- 大小:27.46 KB
- 文档页数:2
水导激光波长引言水导激光是一种利用激光技术在水中传输信息的方法。
在水下通信、水下成像、水下测量等领域具有广泛的应用。
而水导激光波长是指在水中传输的激光的波长,它对于实现高效的水下通信和成像至关重要。
本文将从以下几个方面来讨论水导激光波长:概述、选择因素、应用和发展趋势。
概述在水中传输信息时,由于水分子对不同波长的光吸收和散射特性不同,选择合适的波长可以最大程度地减小信号衰减和传输损耗,提高通信和成像质量。
因此,研究人员一直致力于寻找适合水导激光的波长。
目前常用的水导激光波长主要集中在可见光和红外光区域。
其中,可见光区域包括蓝色(400-500nm)、绿色(500-600nm)和红色(600-700nm),红外光区域包括近红外(700-900nm)和中红外(900-2500nm)。
选择因素选择合适的水导激光波长需要考虑多个因素,包括水的光学特性、传输距离、通信速率和设备成本等。
水的光学特性水分子对不同波长的光有不同的吸收和散射特性。
在可见光区域,蓝色光波长较短,容易被水分子吸收和散射,传输距离较短;红色光波长较长,能够在水中传输更远。
而在红外光区域,近红外光波长相对较短,适用于近距离通信和成像;中红外光波长相对较长,能够在水中传输更远。
传输距离不同应用场景对传输距离有不同要求。
一般来说,在浅海或近海环境下,可见光区域(特别是蓝色和绿色)的激光波长可以满足需求;而在深海或远海环境下,红外光区域的激光波长更适合。
通信速率通信速率是衡量水导激光通信性能的重要指标之一。
根据香农公式,通信速率与信噪比成正比。
而不同波长的光在水中的传输损耗和衰减程度不同,因此选择合适的波长可以提高通信速率。
不同波长的激光器和接收器的制造成本存在差异。
一般来说,可见光区域的设备成本较低,而红外光区域的设备成本较高。
因此,在实际应用中需要综合考虑设备成本和性能需求。
应用水导激光波长在水下通信、水下成像和水下测量等领域有广泛应用。
一种应用距离选通成像技术的微光望远镜张跃民;刘晓莉;陈洲;赵路民;张红;张金涛【摘要】利用红外波长的激光对微光系统进行辅助照明,改善目标区域的环境照度和对比度,使目标从视场中凸显出来,提高微光系统的探测距离,改善观察效果.采用距离选通技术,合理匹配激光脉冲与选通像增强器的工作时序,屏蔽目标前后非目标反射光以及来自大气中悬浮微粒产生的杂散光干扰,解决同轴照明后向散射问题,达到只观察选定距离内目标的目的.通过微光选通望远镜的工程实践,将激光距离选通技术成功地运用于微光探测领域中,在无月星光,照度为1×10-3 lx,大气能见度为10 km条件下,对中型坦克或卡车侧面目标的识别距离可达到1 400m.%Under the help of auxiliary lighting on low-light level system by using laser with infrared wavelength,environmental illumination and contrast of object area can be improved,making the object outstand from vision area,which can effectively enlarge the range of lowlight detection and improve the observation effects.Adopting range gating technology,properly arranging the work order between laser pulse and gated image intensifier,shielding the object from troubling by inflected light around the object and stray light from airborne suspended particulates,solving coaxial illumination back scattering problem,the object only from the selected range can be observed.Through engineering practices of laser assistant low-light level binoculars,the range gating technology is successfully applied to low-light detecting area,and the recognizable range for medium tank and the truck broadside is up to 1 400 m under simple background conditions,withoutmoonlight or starlight,with illumination of 1 × 10-3lx and atmosphere visibility of 10 km.【期刊名称】《应用光学》【年(卷),期】2013(034)004【总页数】5页(P667-671)【关键词】激光照明;微光选通望远镜;距离选通;后向散射【作者】张跃民;刘晓莉;陈洲;赵路民;张红;张金涛【作者单位】河南平原光电有限公司,河南焦作454001;焦作大学机电工程学院,河南焦作454000;河南平原光电有限公司,河南焦作454001;河南平原光电有限公司,河南焦作454001;河南平原光电有限公司,河南焦作454001;河南平原光电有限公司,河南焦作454001【正文语种】中文【中图分类】TN249引言微光望远镜主要用于夜间观察、搜索目标,可利用镜内分划观测炸点位置,修正射击偏差,同时也可作为夜间侦察、监控装备使用。

基于时钟移相相或的高精度脉冲对产生方法崔伟;商洁;范松涛;王新伟;周燕【摘要】针对超分辨率三维选通成像中同步控制脉冲对精度低的问题,提出了时钟移相相或的高精度脉冲对产生方法.该方法首先对可编程器件的系统时钟进行等差相位的数字移相产生多路时钟信号,再根据脉冲对中延时值和脉宽值选择对应的两路时钟产生脉宽信号,最后将两路脉宽信号进行相或运算得到高精度的脉冲对信号.实验表明,该方法可以将延时和脉宽的控制精度提高到1 ns,优于传统脉冲产生方法的5 ns精度,使超分辨率三维选通成像系统在直径2.5 m视场内的距离分辨率达到1 cm,为对更小目标进行成像和识别提供技术基础.%A method of clock phase shift and OR operation was put forward for high precision synchronous con-trol pulse-pairs in 3D super-resolution range-gatedimaging.Firstly,multi channel clock signals were generated by shifting phase arithmetically for the system clock.In the next place,two of the clock signals were chosen based on the pulse width and the delay for two pulse signals.Finally,high precision synchronous control signals were generated by the OR operation with the two pulse signals.Experiments results showed that the proposed method could attain the precision of 1 ns for delay and pulse width and the range resolution could reach 1 cm in field of view with 2.5 meters in diameter,which could make it possible to image and identify smaller target for 3D super-resolution range-gated imaging.【期刊名称】《探测与控制学报》【年(卷),期】2017(039)002【总页数】4页(P111-114)【关键词】超分辨率三维选通成像;脉冲对精度;时钟移相相或【作者】崔伟;商洁;范松涛;王新伟;周燕【作者单位】中国辐射防护研究院保健物理研究所,山西太原 030006;中国科学院半导体研究所光电系统实验室,北京 100083;中国辐射防护研究院保健物理研究所,山西太原 030006;中国科学院半导体研究所光电系统实验室,北京 100083;中国科学院半导体研究所光电系统实验室,北京 100083;中国科学院半导体研究所光电系统实验室,北京 100083【正文语种】中文【中图分类】TN249超分辨率三维选通成像技术是一种新型的三维成像技术,利用激光脉冲和选通门脉冲的卷积作用获取目标的空间能量包络,通过相邻两帧切片图像间的像素强度比与距离向能量比之间的映射关系实现目标三维空间信息的快速反演,获取目标的三维图像。
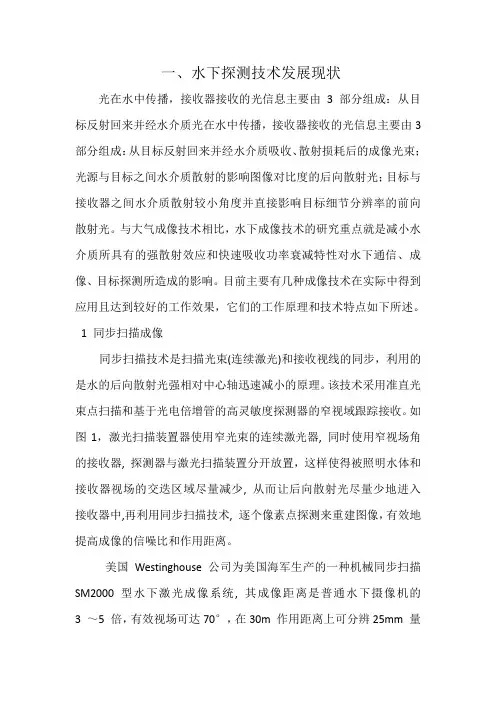
一、水下探测技术发展现状光在水中传播,接收器接收的光信息主要由 3 部分组成:从目标反射回来并经水介质光在水中传播,接收器接收的光信息主要由3 部分组成:从目标反射回来并经水介质吸收、散射损耗后的成像光束;光源与目标之间水介质散射的影响图像对比度的后向散射光;目标与接收器之间水介质散射较小角度并直接影响目标细节分辨率的前向散射光。
与大气成像技术相比,水下成像技术的研究重点就是减小水介质所具有的强散射效应和快速吸收功率衰减特性对水下通信、成像、目标探测所造成的影响。
目前主要有几种成像技术在实际中得到应用且达到较好的工作效果,它们的工作原理和技术特点如下所述。
1 同步扫描成像同步扫描技术是扫描光束(连续激光)和接收视线的同步,利用的是水的后向散射光强相对中心轴迅速减小的原理。
该技术采用准直光束点扫描和基于光电倍增管的高灵敏度探测器的窄视域跟踪接收。
如图1,激光扫描装置器使用窄光束的连续激光器, 同时使用窄视场角的接收器, 探测器与激光扫描装置分开放置,这样使得被照明水体和接收器视场的交迭区域尽量减少, 从而让后向散射光尽量少地进入接收器中,再利用同步扫描技术, 逐个像素点探测来重建图像,有效地提高成像的信噪比和作用距离。
美国Westinghouse 公司为美国海军生产的一种机械同步扫描SM2000 型水下激光成像系统, 其成像距离是普通水下摄像机的3 ~5 倍,有效视场可达70°,在30m 作用距离上可分辨25mm 量级的图像。
该系统的有效视场大约为距离选通技术的5 倍, 成像质量(即分辨率)也比距离选通好。
图1:2、距离选通技术距离选通技术是利用脉冲激光器和选通摄像机,以时间的先后分开不同距离上的散射光和目标的反射光,使由被观察目标反射回来的辐射脉冲刚好在摄像机选通工作的时间内到达摄像机并成像。
如图2,采用脉冲激光源照明目标,接收端使用距离选通门,在照射的短脉宽激光的光从目标返回前,相机快门一直关闭,信号光抵达时,快门才打开,这样使得接收器几乎同时接收到整个视场内所有景物的反射光。
距离选通激光成像水体后向散射光能量分布计算随着光学技术的发展,研究人员开发出了一种有效的技术,即可以扫描水体表面的激光成像,从而测量水中分布的光能量。
这种技术可以提供一种实时获取水下环境信息的方法,从而支持水下监测和分析。
然而,这项技术需要计算水体表面后向散射光能量分布,以便获得更准确的结果。
激光成像水体后向散射光能量分布计算是一种复杂的仿真计算,主要由试验数据、仿真计算和实验验证组成。
首先,要选取合理的光源和水体表面材质,本实验使用激光作为光源,水体表面材质采用非导体材质。
然后,需要构建试验系统,并且进行实验测量,测量水体表面的后向反射能量分布。
接下来,利用获得的实验观测数据,通过仿真计算,得到光能量在水体表面上分布的准确状态,以便比较实验和仿真计算结果的差异。
最后,使用实验和仿真计算结果进行比对,得出激光成像水体后向散射能量分布的精确状态。
激光成像水体后向散射光能量分布的计算,有助于更加准确地测量水下光照度,可以更好地评估海洋水体环境,改善水体质量监测技术,提高水体环境评估的准确性。
这种技术可以更好地应用于渔业科学研究,监测水生动植物生物分布,研究可持续开发策略,等等。
因此,计算激光成像水体后向散射光能量分布具有重要意义。
在实际应用过程中,计算激光成像水体后向散射光能量分布的过程包括:(1)给定海洋水体环境参数;(2)准备激光源和光谱仪;(3)计算光源和海水表面散射后的照度分布特征;(4)通过仿真计算,获得海水表面的精确照度分布;(5)使用实验和仿真计算结果进行比对,得出精确的激光成像水体后向散射光能量分布结果。
在建立激光成像水体后向散射光能量分布计算模型时,需要考虑光源和反射表面的选择,提前准备实验所需的设备,并进行仔细设计实验以测量出水体表面的精确照度分布。
实验结果可以与仿真计算进行对比,以确定计算结果的准确性。
总之,激光成像水体后向散射光能量分布的计算是一项复杂的,但又重要的工作,它有助于更准确地测量水下环境并实施相关的评估。
5.4微光电视系统应用5.4.1 选通成像选通成像大气后向散射 l m l l 0 接收器 照明器 景物 d l 大气后向散射在主动红外成像系统中,照明系统安装在接收器附近,在照射远距离目标时,探照明光轴非常接近系统光轴。
照射光束在大气传输过程中被大气散射,其中一部分后向散射辐射将进入观察视场,在成像面上造成一个附加背景,从而降低成像的对比度和清晰度。
在能见度差的情况下,这一影响是主动红外成像系统性能的一个基本限制因素。
选通技术是利用短脉冲光照明器和选通型ICCD,从时间上分开不同距离上的散射光和目标的反射光,使由被观察目标反射回来的辐射脉冲刚好在变像管选通工作时到达像管并成像。
由于辐射脉冲在投向目标过程中产生的后向散射辐射到达接收器时,像管处于非工作状态,因而可减小后向散射对成像系统的影响。
选通ICCD的像管通常为静电像管,照明器采用脉冲激光光源,为保证足够的能量有时也采用激光二极管列阵。
通常脉冲脉宽时间为5~200 ns,按光速对应的纵深距离(景深)约为1.5~60m,可有效减小后向散射。
但脉宽的减小,对选通像管的响应时间和选通控制提出更高的要求。
T:发射激光脉冲(∆t),摄像机快门关闭T1:激光脉冲到达目标,摄像机快门关闭T 2:目标反射激光,摄像机快门关闭T 3=T+2τ:反射光到达进入镜头,摄像机快门打开(∆t)水下成像效果应用于军事侦察、搜救、监视、水下探测等选通成像技术的应用北京理工大学水下成像系统无选通加选通MAMA 探测系统类型管型SOHO STIS FUSE像元数360×10241024×1024728×2024(×4)像元尺寸(μm 2)25×2525×2522×16阳极有效面积(mm 2)9.0×25.625.6×25.616×32.4(×4)MCP 有效面积(mm 2)10×2727×2717×33(×4)MCP 通道尺寸(μm 2)12128放大器数105133577(4×144+1)光阴极材料MgF2&KBr CsI&Cs 2Te KBr用于太阳和大气日光层观测(SOHO)、空间望远镜摄谱仪(STIS)和远紫外光谱探测仪(FUSE)的MAMA探测系统有不同形式的结构。
水下激光成像系统探测距离的计算与仿真王磊;徐智勇;张启衡;王华闯;于学刚;杨建军【摘要】为了估计水下激光成像系统的工作距离,根据水下激光成像系统的成像过程,通过分析目标的辐射特性,水体的衰减特性等各因素,建立了水下激光成像系统的信噪比模型.根据识别目标所需要的信噪比阈值、脉冲激光器等器件的性能指标,推导出水下激光成像系统的工作距离公式,并且完成了系统成像距离的计算与仿真.采用532 nm的Nd∶YAG固体激光器、自组ICCD相机以及基于FPGA技术设计的同步控制电路板,进行了距离选通水下激光成像实验.实验结果表明:理论模型计算的信噪比与实际图像的信噪比平均误差为1.37 dB,证实了该模型的合理性.%In order to estimate the detection range of underwater laser imaging system, according to the imaging mechanism, the analysis of target radiation is reported, along with the analysis of seawater attenuation and other factors, and then the Signal-to-noise Ratio(SNR) model of the underwater laser imaging system is established. According to the threshold of SNR for recognizing the target, along with the performance of laser and other devices, formulation of detection range is obtained. Then computation and simulation of detection range is implemented. By adopting a 532nmNd:YAG laser, self-made ICCD camera and a range-gated sync control board based on FPGA technology, the underwater laser imaging experiment is done. The experimental results, which indicate that the average error of SNR between theoretical model and real image is 1.37dB, show the rationality of the SNR model.【期刊名称】《光电工程》【年(卷),期】2012(039)005【总页数】6页(P39-44)【关键词】成像系统;激光器;距离选通;信噪比【作者】王磊;徐智勇;张启衡;王华闯;于学刚;杨建军【作者单位】中国科学院光电技术研究所,成都610209;中国科学院研究生院,北京100049;中国科学院光电技术研究所,成都610209;中国科学院光电技术研究所,成都610209;中国科学院光电技术研究所,成都610209;中国科学院光电技术研究所,成都610209;中国人民解放军93617部队,北京101400【正文语种】中文【中图分类】TN247;TN2090 引言1963年S.Q.Duntley及Gilbert G D等人发现海水中存在一个“蓝绿”透明窗口[1],为激光水下探测奠定了理论基础。
水下激光距离选通三维成像方法黄子恒;李微;杨克成;夏珉【摘要】基于水下距离选通激光成像技术,利用选通成像中回波强度相变化特性中包含的距离信息,提出了一种针对水下目标的三维成像方法。
结合实验室现有的水下距离选通激光成像系统,对15 m处的水下目标进行了三维成像。
这一方法有效抑制了水下成像系统中存在的目标表面材质、水体衰减以及目标各点法线方向与入射激光脉冲方向夹角不同等因素对于三维成像造成的不良影响,同时仅需要从单一方向对目标进行成像,减少了所需图像采集的次数,简化了三维重构的过程。
%According to the distance information in phase change characteristics of laser echo intensity in range-gated imaging system,a three dimensional imaging method for underwater target was presented. Combined with underwater range-gated laser imaging system in the laboratory,3-D images of the underwater target with a 15m distance was a-chieved. This method can effectively restrain some adverse impacts that caused by target surface materials,water atten-uation,the angle between the direction of incident laser pulse and the normal direction of target surface. This method doesn′t need to change the direction of observation,reduces the collection times of required image,and simplifies the 3-D imaging process.【期刊名称】《激光与红外》【年(卷),期】2016(046)011【总页数】5页(P1315-1319)【关键词】水下目标;距离选通;三维成像【作者】黄子恒;李微;杨克成;夏珉【作者单位】华中科技大学光学与电子信息学院,湖北武汉430074;华中科技大学光学与电子信息学院,湖北武汉430074;华中科技大学光学与电子信息学院,湖北武汉430074;华中科技大学光学与电子信息学院,湖北武汉430074【正文语种】中文【中图分类】TN2491999年,美国海军研究局最先展开了水下目标的三维成像的研究[1]。
基于距离选通的非视域成像技术实验韩宏伟;钟炜【摘要】介绍了采用距离选通技术进行非视域成像探测的原理,基于窄脉冲激光器和选通型成像器件搭建了非视域主动成像实验系统.以玻璃作为中介反射面,以黑白条纹靶板作为目标,对目标和周围环境处于不同光照情形时,系统的非视域成像效果进行测试.结果表明,基于距离选通的非视域成像技术是一种能够在不同光照条件下实现对视觉盲区进行有效观察的成像技术.【期刊名称】《光学仪器》【年(卷),期】2015(037)003【总页数】6页(P220-225)【关键词】距离选通;非视域成像;背景光【作者】韩宏伟;钟炜【作者单位】海军工程大学兵器工程系,湖北武汉430033;海军工程大学兵器工程系,湖北武汉430033【正文语种】中文【中图分类】TN29借助光滑墙壁或窗户的反射间接成像,以实现对由于墙壁或街道拐角等遮挡而形成的无法直接观察的视觉盲区进行观察的技术称为非视域成像技术[1-2]。
由于能够绕过拐角或障碍物的遮挡对目标成像,该技术在城市巷战、反恐、灾难救援等方面都具有较大的应用潜力[2]。
瑞典国防研究局(FOI)和德国FGAN-FOM实验室于2006-2007年联合开展了非视域成像技术的外场实验[3-4],其实验系统采用1.5μm波长的激光器和Intevac公司的选通型红外相机,配备500 mm的镜头。
实验中,系统距墙面90 m,激光以30°的入射角照射墙面。
当以墙面上的窗户玻璃作为中介反射面时,可以获得距离墙面20 m的持枪站立人员和30 m的汽车牌照图像。
当激光照射窗户周围的墙砖、混凝土和金属,而探测器仍通过窗户玻璃接收目标反射光时,可以获得铝箔制成的合作目标图像以及非常微弱的30 m处的汽车牌照图像。
2010年,FOI采用Obzerv公司的主动式距离选通夜视系统进行实验,该系统采用波长为860 nm的激光器。
实验时使用的中介反射面曲率半径约1.5 m的光洁喷漆曲面(汽车外壳),由于损耗因子较大,只能获得距汽车1.5 m处的人员图像[5]。
第51卷 第3期 激光与红外Vol.51,No.3 2021年3月 LASER & INFRAREDMarch,2021 文章编号:1001 5078(2021)03 0306 05·激光应用技术·距离选通水下激光成像作用距离简化核算方法付学志1,王庆胜1,邓代竹2,李 季2(1.92228部队,北京102488;2.湖北久之洋红外系统股份有限公司,湖北武汉430223)摘 要:距离选通水下激光成像技术通过控制成像模块的阴极快门时间,从时域上屏蔽大部分可进入成像模块的光信号,能有效抑制水体后向散射对激光成像系统探测性能的影响,提高作用距离。
距离选通水下激光成像设备的作用距离与水质条件有关,文章给出了一种关于作用距离的有效简化计算方法,根据该方法,可得出设备在不同水质的作用距离。
关键词:距离选通;激光成像;后向散射;作用距离中图分类号:TN249 文献标识码:A DOI:10.3969/j.issn.1001 5078.2021.03.008AsimplifiedaccountingmethodfortherangeofdistanceseparationlaserimagingunderwaterFUXue zhi1,WANGQing sheng1,DENGDai zhu2,LIJi2(1.Unit92228ofPLA,Beijing102488,China;2.HubeiJiuzhiyangInfraredSystemCo.,Ltd,Wuhan430223,China)Abstract:Bycontrollingthecathodeshuttertimeoftheimagingmoduleandshieldingmostoftheopticalsignalsthatcanentertheimagingmoduleintimedomain,thelaserrangegatedimagingtechnologycaneffectivelysuppressthein fluenceofback scatteringofwaterontheperformanceoftheimagingsystemandimprovetheoperatingrange.Theop eratingrangeofthelasergatedimagingequipmentisrelatedtothewaterqualitycondition.Thispaperpresentsanef fectivesimplifiedcalculationmethodoftheoperatingrange,accordingtowhichtheoperatingrangeoftheequipmentindifferentwaterqualitycanbeobtained.Keywords:rangegated;laserimage;back scattering;operatingrange作者简介:付学志(1982-),男,工程师,博士,研究方向为光学图像处理。
水下激光成像技术5 水下激光成像技术本文主要介绍了近年发展起来的三种主要的激光水下成像方法,即常规水下激光成像、高分辨率水下激光三维成像和偏振激光成像,分析了它们各自的工作原理、特点以及各自的发展状况。
水下成像技术在水下目标发现、海面材料探测及海洋地理工程中具有广泛而重要的应用价值,正受到各国研究者的日益重视。
与我们平常所见空气中成像技术不同,水介质的特性是强散射效应和快速吸收功率衰减,因此直接将摄像机运用到水中,由于强散射效应,图像的噪声很大,且距离有限。
激光器的运用从某种程度解决了成像的距离问题,在过去的几年中,成像距离和图像质量得到了很大程度的提高,这些进步都是因为采用了非传统成像技术和激光技术。
本文对主要的几种水下成像技术进行了分析,讨论了它们各自的技术原理和发展动态。
5.1工作原理由上所述,与大气成像技术相比,水下成像技术的重点是要减小水这一特定介质所具有的强散射效应和快速吸收功率衰减特性对成像质量的限制。
目前已经有几种成像技术在实际中得到应用且达到较好的工作效果,它们的工作原理和技术特点见表1。
表1 主要水下成像技术的工作原理比较5.1.1常规激光水下成像技术常规水下成像技术包括激光扫描水下成像和距离选通激光水下成像。
其中激光扫描水下成像是利用水的后向散射光强相对中心轴迅速减小的原理。
该技术采用准直光束点扫描和基于光电倍增管的高灵敏度探测器的窄视域跟踪接收。
如图1,在这种系统中,探测器与激光束分开放置,激光发射器使用的是窄光束的连续激光器,同时使用窄视场角的接收器,两个视场间只有很小的重叠部分,从而减小探测器所接收到的散射光。
利用同步扫描技术,逐个像素点探测来重建图像。
因此这种技术主要依靠高灵敏度探测器在窄小的视场内跟踪和接收目标信息,从而大大减小了后向散射光对成像的影响,进而提高了系统信噪比和作用距离。
距离选通成像系统采用一个脉冲激光器,具有选通功能的像增强型CCD成像期间,通过对接收器口径进行选通来减小从目标返回到探测器的激光后向散射。
2021.16科学技术创新水下光学成像技术及应用孙鹏(上海瑞洋船舶科技有限公司,上海201108)水下成像技术主要应用于水下作业,在水这种介质中传播时光的能量会有较多损耗,同时容易产生光噪声,而且光在水中会发生折射和散射,这样一方面会造成光的能量受损成像质量差,另一方面系统成像距离受损。
在水下成像技术发展的初级阶段,虽然能通过增加光的强度的方法改善成像效果,但光会出现反向噪声的问题。
近年来激光技术得到了广泛研究与发展,激光被应用到水下成像技术,发展出了水下激光成像技术。
采用激光,能改善光的散射效应和吸取功率减退效应,这样一来水下成像质量得到了极大的提高,同时也增加了勘测的距离。
目前水下激光成像系统广泛应用于海洋开发、军事、工程应用方面,比如海上走私船监视、海上军事装备的检修与监控、海底军事目标的搜查以及海底隧道的勘测维修等。
近几年水下成像技术发展迅速,在实用阶段取得了良好的效果,尤其是在系统成像深度及效果方面进步显著,这些进步与激光技术和先进成像技术的发展密不可分。
但是在面对内河水域,尤其是水质浑浊甚至潜水员在水下的能见度为零的时候,常规水下成像技术显得力不从心,在确定水下物品价值、水下物品型号等方面显得捉襟见肘,无法及时完成水下作业的前期考察准备工作。
因此在浑水、含泥沙量大、潜水员在水中能见度为零或近似于零的水域下研发一种浑浊水域水下光学成像设备称为当前亟待解决的技术问题。
1水下成像技术原理及其重要性在自然环境下,高效获取图像信息并对其进行处理和分析较为困难,这是因为在光学成像系统内,其自身的能见度和所得图像的对比度过低,无法得到高质量图像信息。
具体而言,光在水体中存在能量损失和散射,使得有效光线在传输过程中失真,造成成像模糊,无法达到水下勘测目的。
此外,光在水中受水中物质影响会出现光噪声,对目标反射光造成了很大的干扰,这会降低图像的对比度。
因此水下光学成像退化的主要原因就是水会不同程度地吸收不同光波;水中悬浮颗粒造成光的散射;当光穿过水体时,水体中存在多种物质的单位长度对不同光波的光的衰减作用各不相同,这会导致图像的颜色失真。