直方图修正法
- 格式:doc
- 大小:99.00 KB
- 文档页数:2
模式识别与仿真旦墼!曼!!旦皇!旦g!!!!旦!璺!鱼墨!盟!!塾!垒!《自动化技术与应用》2007年第26卷第12期直方图修改技术在车牌识别预处理中的应用李全利.陈银燕.刘长亮(哈尔滨理工大学,黑龙江哈尔滨150080)摘要:在进行车牌识别的预处理过程中,如何有效地提高车牌图像质量是一个关键,这一步处理的好坏将直接影响到后面车牌识别的效果。
本文重点研究直方图修改技术增强图像方法在车牌识别预处理中的应用,给出了直方图修改技术的原理,以及直方图均衡化、规定化和对比度调整的原理,最后用MATLAB来实现车牌图像增强的效果。
关键词:直方图;车睥图像,图像增强;MAn.AB中图分类号:TP391.41文献标识码:A文章编号:1003—724l(2007)12—0073—03HiStOgramRewOrk—r-eChnOIogyinPre—prOCeSSingOftheLiCenSePIateReCOgnitiOnLIQuan.1i,CHENYin-yan,LIUCh锄g-Uang饵arbinUfli、镪埘ofScie;I啪锄dTechnology’Harbin150080,C}1iIla)Abstract:Thispaperintroducestheapplicationofhistogr锄reworktechnologyinpre—processingofthe1icenseplaterecognition.Thebasicprincipleofthehistogramreworktechn0109yispresented,andthemethodsofhistogramequalization,regu。
1ationandcontrastarealsodiscussed.TheresultsOfthelicenseplateimageenhancementbasedonMATLABarealsopresented.Keywords:histogram;1icenseplateimage;imageenhancement;MAI’LAB1引言一个完整的车牌识别系统包括:预处理、车牌定位、字符分割与字符识别。

一种直接直方图修正方法
余日泰;蔡吸礼
【期刊名称】《中国图象图形学报》
【年(卷),期】1999(004)006
【摘要】图象增强中的直方图修正一般分为2种不同的方法:直方图均衡和直方图规定,这是因为传统的直方图规定[1]要经过2次直方图均衡.本文提出的方法通过将直方图均衡作为直方图规定的特例考虑,既可实现直方图均衡又可实现直方图规定,从而实现了这2种方法的统一,而且直方图规定的结果好于文献[1]方法.
【总页数】3页(P467-469)
【作者】余日泰;蔡吸礼
【作者单位】杭州电子工业学院,杭州,310037;杭州广播电视大学,杭州,310009【正文语种】中文
【中图分类】TN919.8
【相关文献】
1.阻尼矩阵与刚度矩阵的一种直接修正方法 [J], 袁永新;戴华
2.数字图像直方图处理中的映射规则--评"用于数字图像直方图处理的一种二值映射规则"一文 [J], 章毓晋
3.灰度成像扩展目标跟踪直方图匹配修正方法 [J], 秦雨萍;张双;张萍;尹福成
4.一种基于直方图统计特征的直方图匹配算法的研究 [J], 朱磊
5.一种简单的直方图工具—数据库的直方图映象 [J], 朱景德
因版权原因,仅展示原文概要,查看原文内容请购买。
重庆交通大学测量与空间信息处理实验报告实验课程:遥感原理及应用实验名称:直方图修正法班级:姓名:学号:实验日期:2012 年11 月17 日实验原理一.直方图均衡化直方图均衡算法是图象增强空域法中的最常用、最重要的算法之一。
目前较常用的增强方法有全局直方图均衡化、局部直方图均衡化两大类。
全局直方图均衡化是将原图像的直方图通过变换函数变为均匀的直方图, 然后按均匀直方图修正原图像, 从而获得一幅灰度分布均匀的新图像。
它以概率理论作基础, 运用灰度点运算来实现直方图的变换, 从而达到图象增强的目的。
它的变换函数取决于图像灰度直方图的累积分布函数。
概括的说, 就是把一已知灰度概率分布的图像, 经过一种变换, 使之演变成一幅具有均匀概率分布的新图像。
当图像的直方图为一均匀分布时,图像的信息熵最大,此时图像包含的信息量最大,图像看起来就显得清晰。
下面先讨论连续变化图像的均衡化问题。
设r 、s 分别表示原图像和增强后图像的灰度。
假设r 被归一化到区间[0,1], 且r =0 表示黑色及 r = 1表示白色。
当r 、s 在[0,1] 之间时,表示像素灰度在黑白之间变化。
灰度变换函数为s=T(r) 0≤r≤1 (1)它满足以下两个条件:(1) T(r)在区间0≤r≤1中为单值且单调递增;(2) 当0≤r≤1时, 0 ≤T(r)≤1;条件(1)中要求T(r)为单值是为了保证反变换存在, 单调条件保证原图各灰度级在变换后仍保持从黑到白( 或从白到黑) 的排列次序;条件(2)保证变换前后灰度值动态范围的一致性。
图1 给出了满足这两个条件的一个变换函数的例子, 由s 到r 的反变换可以表示为:= 0≤s≤1 (2)r-),(1sT即使 T(r)满足条件(1)和(2), 相应的函数)(1sT-也可能不为单值。
一幅图像的灰度级可被视为区间[0,1] 的随机变量。
令)(r p r 和)(s p s 分别代表随机变量 r 和s 的概率密度函数。
一、实验名称:直方图修正二、实验目的1.对影像进行直方图规定化和均衡化2.利用另外一幅影像进行直方图匹配3.利用直方图统计功能对结果进行分析三、实验内容1.对两幅卫星遥感影像进行规定化并统计分析2.对一幅卫星遥感影像进行均衡化并统计分析四、实验所用的仪器设备计算机和ENVI软件在不同时刻同地的卫星遥感影像2幅五、实验原理1.直方图规定化:是使原图像灰度直方图变成规定形状的直方图而对原始图像作修正的增强方法。
作用:对于在不同时间获取的同一地区或者邻接地区的图像,或者是由于太阳高度角或大气的影响引起差异的图像很有用,特别是对图像镶嵌和变化检测。
2.直方图均衡化:又称直方图平坦化,是将一已知灰度概率密度分布的影响,经过某种变换变成一幅具有均匀灰度概率密度分布的新影像,其结果是是扩大了像元取值得动态范围。
效果:(1)均衡后每个灰度级的像元频率近似相等。
(2)频率少的灰度级被合并,频率数高的灰度级被保留,可以增强影像上大面积地物与周围地物的反差。
六、实验步骤1.直方图规定化与统计:同时打开两幅遥感影像,影像显示号分别为Display#1,Display#2.规划化前影像——Display#2规划化前影像——Display#11)在Display#2的主影像窗口选择Enhance/HistogramMatching,出现HistogramMatchingInputparameter对化框。
2)在“MatchTo”列表中,选择匹配的直方图的影像显示号Display#1。
3)在InputHistogram/Image/OK得到直方图匹配后的结果。
4)在“Flie/SaveImageAs/Imagefile”中得到对话框“OutputDisplaytoimageFile”选择保存所在文件下,保存为”guihua”。
在“BasicTools/statistics/ComputerStatistics/ComputerStatisticsInputFile”,选择所要分析统计的图像文件.例如guihua/OK/BasicStats/Histograms/OK按Display#1的影像进行匹配后的Display#2即guihua规划化前影像——Display#1 在StatisticsResults:guihua/SelectPlot/Histogram:AllBands并对三幅图进行分析Guihua直方统计图Display#2直方统计图Display#1直方统计图结果分析:[1].由上显示图—1为规划化后的图,图—2,3为规划化前的图,三幅图每个都有3个波段,图—2,3在灰度值0—255之间变化,图—1在0-210之间变化,图—1,2在灰度值80—170变化较集中。
【关键字】精品第5章直方图修正和彩色变换这一章,我们主要和调色板打交道。
先从最简单的反色讲起。
5.1 反色反色(invert)就是形成底片效果。
例如,图5.2为图5.1反色后的结果。
图5.1 原图图5.2 图5.1反色后的结果反色有时是很有用的,比如,图5.1中黑色区域占绝大多数,这样打印起来很费墨,我们可以先进行反色处理后再打印。
反色的实际含义是将R、G、B值反转。
若颜色的量化级别是256,则新图的R、G、B值为255减去原图的R、G、B值。
这里针对的是所有图,包括真彩图、带调色板的彩色图(又称为伪彩色图)、和灰度图。
针对不同种类有不同的处理。
先看看真彩图。
我们知道真彩图不带调色板,每个象素用3个字节,表示R、G、B三个分量。
所以处理很简单,把反转后的R、G、B值写入新图即可。
再来看看带调色板的彩色图,我们知道位图中的数据只是对应调色板中的一个索引值,我们只需要将调色板中的颜色反转,形成新调色板,而位图数据不用动,就能够实现反转。
灰度图是一种特殊的伪彩色图,只不过调色板中的R、G、B值都是一样的而已。
所以反转的处理和上面讲的一样。
这里,我想澄清一个概念。
过去我们讲二值图时,一直都说成黑白图。
二值位图一定是黑白的吗?答案是不一定。
我们安装Windows95时看到的那幅setup.bmp 是由蓝色和黑色组成的,但它实际上是二值图。
原来,它的调色板中的两种颜色是黑与蓝,而不是黑与白。
所以说二值图也可以是彩色的,只不过一般情况下是黑白图而已。
下面的程序实现了反色,注意其中真彩图和调色板位图处理时的差别。
BOOL Invert(HWND hWnd){DWORDOffBits,BufSize;LPBITMAPINFOHEADER lpImgData;LPSTR lpPtr;HLOCAL hTempImgData;LPBITMAPINFOHEADER lpTempImgData;LPSTR lpTempPtr;HDC hDc;HFILE hf;LONG x,y;LOGPALETTE *pPal;HPALETTE hPrevPalette=NULL;HLOCAL hPal;DWORD i;unsigned char Red,Green,Blue;OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);BufSize=OffBits+bi.biHeight*LineBytes; //新开缓冲区的大小if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL){MessageBox(hWnd,"Error alloc memory!","Error Message",MB_OK|MB_ICONEXCLAMATION);return FALSE;}lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData );//拷贝头信息memcpy(lpTempImgData,lpImgData,BufSize);hDc=GetDC(hWnd);if(NumColors!=0){ //NumColors不为0说明是带调色板的lpPtr=(char *)lpImgData+sizeof(BITMAPINFOHEADER);//指向原图数据lpTempPtr=(char *)lpTempImgData+sizeof(BITMAPINFOHEADER);//指向新图数据//为新调色板分配内存hPal=LocalAlloc(LHND,sizeof(LOGPALETTE)+NumColors*sizeof(PALETTEENTRY));pPal =(LOGPALETTE *)LocalLock(hPal);pPal->palNumEntries =(WORD) NumColors;pPal->palVersion = 0x300;for (i = 0; i < NumColors; i++) {Blue=(unsigned char )(*lpPtr++);Green=(unsigned char )(*lpPtr++);Red=(unsigned char )(*lpPtr++);lpPtr++;//反转调色板中的颜色,存入新的调色板pPal->palPalEntry[i].peRed=(BYTE)(255-Red);pPal->palPalEntry[i].peGreen=(BYTE)(255-Green);pPal->palPalEntry[i].peBlue=(BYTE)(255-Blue);pPal->palPalEntry[i].peFlags=0;*(lpTempPtr++)=(unsigned char)(255-Blue);*(lpTempPtr++)=(unsigned char)(255-Green);*(lpTempPtr++)=(unsigned char)(255-Red);*(lpTempPtr++)=0;}if(hPalette!=NULL)DeleteObject(hPalette);hPalette=CreatePalette(pPal); //产生新的调色板LocalUnlock(hPal);LocalFree(hPal);if(hPalette){hPrevPalette=SelectPalette(hDc,hPalette,FALSE);RealizePalette(hDc);}}else{ //不带调色板,说明是真彩色图for(y=0;y<bi.biHeight;y++){lpPtr=(char *)lpImgData+(BufSize-LineBytes-y*LineBytes);lpTempPtr=(char *)lpTempImgData+(BufSize-LineBytes-y*LineBytes);for(x=0;x<bi.biWidth;x++){Blue=(unsigned char )(*lpPtr++);Green=(unsigned char )(*lpPtr++);Red=(unsigned char )(*lpPtr++);//反转位图数据中的颜色,存入新的位图数据中*(lpTempPtr++)=(unsigned char)(255-Blue);*(lpTempPtr++)=(unsigned char)(255-Green);*(lpTempPtr++)=(unsigned char)(255-Red);}}}if(hBitmap!=NULL)DeleteObject(hBitmap);hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,(LONG)CBM_INIT,(LPSTR)lpTempImgData+sizeof(BITMAPINFOHEADER)+NumColors*sizeof(RGBQUAD),(LPBITMAPINFO)lpTempImgData,DIB_RGB_COLORS);if(hPalette && hPrevPalette){SelectPalette(hDc,hPrevPalette,FALSE);RealizePalette(hDc);}hf=_lcreat("c:\\invert.bmp",0);_lwrite(hf,(LPSTR)&bf,sizeof(BITMAPFILEHEADER));_lwrite(hf,(LPSTR)lpTempImgData,BufSize);_lclose(hf);//释放内存和资源ReleaseDC(hWnd,hDc);LocalUnlock(hTempImgData);LocalFree(hTempImgData);GlobalUnlock(hImgData);return TRUE;}5.2 彩色图转灰度图第2章中提到了YUV的颜色表示方法,在这种表示方法中,Y分量的物理含义就是亮度,它含了灰度图(grayscale)的所有信息,只用Y分量就完全能够表示出一幅灰度图来。
实验名称:直方图的修正一、实验内容1.对影像进行直方图均衡化。
2.利用另外一幅影像进行直方图匹配。
二、实验所用的仪器设备,包括所用到的数据电脑一台,遥感影像处理软件(ENVI4.3),bhtmref遥感影像三、实验原理(一)直方图的均衡化1.定义:又称直方图的平坦化。
是将一已知的灰度概率密度分布的影像,经过某种变换,变成一幅具有均匀灰度概率密度分布的新影像,结果是扩大了像元取值的动态范围。
2.直方图均衡的效果:(1)均衡后每个灰度级的像元频率近似相等(2)频数少的灰度级被合并,频数高的灰度级被保留,可以增强影像上大面积地物与周围地物的反差。
(二)直方图的规定化1.定义:是使原影像灰度直方图变成规定形状的直方图而对原始影像做修正的增强方法。
2.原理:先对原始影像进行均衡化,再对希望影像进行均衡化,由原始影像均衡化的灰度级得到希望影像的灰度级。
3.作用:对于在不同时间获取的同一地区或者邻接地区的影像,或者是由于太阳高度角或大气的影响引起差异的影像很有用,特别是对影像镶嵌和变化检测。
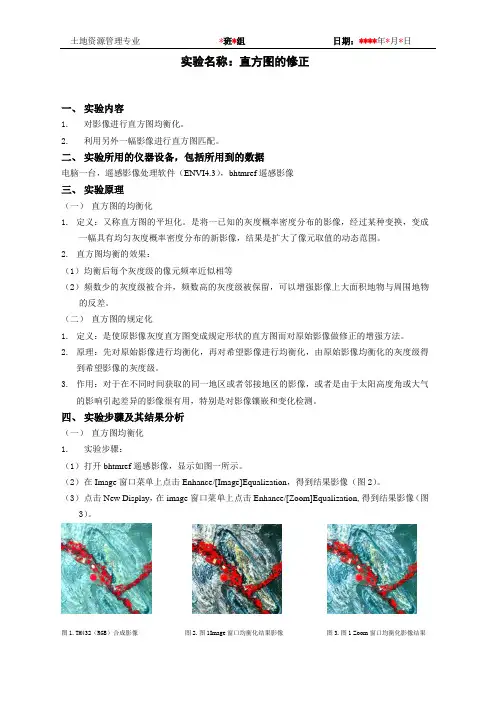
四、实验步骤及其结果分析(一)直方图均衡化1.实验步骤:(1)打开bhtmref遥感影像,显示如图一所示。
(2)在Image窗口菜单上点击Enhance/[Image]Equalization,得到结果影像(图2)。
(3)点击New Display,在image窗口菜单上点击Enhance/[Zoom]Equalization,得到结果影像(图3)。
图1.TM432(RGB)合成影像图2.图1Image窗口均衡化结果影像图3.图1 Zoom窗口均衡化影像结果2.结果及分析:(1)图2比图1更清晰。
通过对两幅图的比较,发现图2相邻地物之间的对比更加明显。
从表一中比较图1和图2的基础数据,可以得到以下结果:从灰度级的最值的差异度可以看出,图二灰度级的最值差绝对值更大,这说明对比度更大。
图2的灰度平均值比图1大很多,这说明图2 的亮度更高。
灰度成像扩展目标跟踪直方图匹配修正方法一、研究背景和意义1.目标跟踪在计算机视觉领域的应用2.灰度成像扩展的应用和特点3.直方图匹配修正方法概述4.本研究的方法和目的二、灰度成像扩展的原理和方法1.灰度级计算方法2.灰度成像扩展的算法3.灰度成像扩展的优势与缺陷三、目标跟踪方法的选择及评价1.目标跟踪的算法分类2.目标跟踪评价指标3.灰度成像扩展在目标跟踪中的应用四、直方图匹配修正方法的设计和改进1.直方图均衡化的原理和方法2.匹配直方图的方法和优缺点3.本研究设计的直方图匹配修正方法及其改进五、实验分析和结论1.实验设计和分析2.对比实验结果分析3.本研究的结论和展望一、研究背景和意义随着计算机视觉技术的不断进步和应用的不断拓展,目标跟踪成为了计算机视觉领域一个关注度较高的研究方向。
目标跟踪技术是指在连续的图像序列中,对于一个既定的目标,在第一帧中提供该目标的位置信息,然后通过查找该目标在下一帧中的位置来跟踪该目标。
目标跟踪在很多应用场景中都发挥着重要的作用,比如轨迹分析、复杂环境中的自动驾驶等。
与此同时,随着计算机计算能力的不断提高,目标跟踪技术也在不断发展和完善,很多新的方法不断被提出来。
灰度成像扩展作为一种较新的图像处理技术,它的主要思想是不同灰度级之间的信息互相融合,以此提取更多的图像信息。
灰度成像扩展技术具有简单、快速、高效的特点,在目标跟踪中的应用也引起了研究者的广泛关注。
而直方图匹配是另一种图像处理方法,主要是通过比较两幅图像的直方图信息来进行图像配准、图像增强等操作,近年来在目标跟踪中也逐渐得到了应用。
本论文的主要目的是将灰度成像扩展和直方图匹配两种图像处理技术相结合,提出一种灰度成像扩展目标跟踪直方图匹配修正方法,以此能更好地处理目标跟踪中的一些难点问题,提高目标跟踪的准确性和稳定性。
因此,本研究具有一定的学术意义和实际应用价值,可以为相关领域的研究者提供一种新的思路和方法。
实验名称:直方图的修正一、实验内容1、对影像进行直方图的均衡化;2、利用另外一幅影像进行直方图的匹配;3、利用直方图统计功能对结果进行分析。
二、实验所用的仪器设备遥感处理ENVI软件,遥感影像bhtmref.img文件三、实验原理图像增强是指按特定的需要突出一幅图像中的某些信息,同时,消弱或去除某些不需要的信息的处理方法。
其主要目的是处理后的图像对某些特定的应用比原来的图像更加有效。
图像增强技术主要有直方图修改处理、图像平滑化处理、图像尖锐化处理和彩色处理技术等。
本次实验以直方图的均衡化和规定化的方法为主要内容。
1、图象灰度的直方图:横坐标为灰度级,纵坐标为概率建立的图形2、直方图的修正包括:1直方图均衡化 2直方图规定化直方图的均衡化又称平坦化,是将一已知灰度概率密度分布影像,经过某种变换,变成一幅具有均匀灰度概率密度分布的新影像,其结果是扩大了象元取值的动态范围;直方图均衡化后的效果::①各灰度级所占图像的面积近似相等。
②原图像上频数小的灰度级被合并,频数高的灰度级则保留且不能被分割,因此可以增强图像上大面积地物与周围地物的反差。
③当输出数据分段级较少时,则会产生一些大类地物的大致近似的轮廓。
直方图的规定化是指将原始影像调整到事先规定的已知的形状,以此来对原始影像特定灰度范围进行增强处理。
四、实验步骤1.打开envi 软件,依次选择TM Band 4 ,TM Band3, TM Band 2得到该影像的标准假彩色合成图像,如图一所示:图一图二2、在Basic tools 里选择 statistics → computer statistics → Spectral Subset 选择4、3、2波段→勾选 covariance 、histogram 、output to a statistics (.sta)、output to a Text Report File (.txt)得到直方图及其计算数据如图二所示:由图二的直方图可看到每个灰度级的分布状况,并且有以下数据统计(在输出的txt文件中查看)(二)对bhtmref影像进行均衡化,并与原始图像进行对比1、选择enhance → [image]equalization 得到图像三save image as image file (equ_b.img)→open image file →在available bands list 中依次选择bhtmref1 的4、3、2波段→display #2→new play →load图三图四2、将bhtmref1 重复(一)的步骤得到均衡化后的直方图如图四所示由图四均衡化后的灰度直方图可得到以下数据对比分析:①均衡化后的图像比原始图像轮廓更为清晰,大面积地物与周围地物仍然存在强烈反差,影像效果更加明显。
实验报告册数字图形图像处理图像的直方图修正学院:人民武装学院学院专业:计算机科学与技术班级: 11级计科班学号: 1120070544 学生姓名:苏靖指导教师:一、实验目的1掌握灰度直方图的概念及其计算方法;2熟练掌握直方图均衡化和直方图规定化的计算过程;二、实验原理图像增强是指按特定的需要突出一幅图像中的某些信息,同时,消弱或去除某些不需要的信息的处理方法。
其主要目的是处理后的图像对某些特定的应用比原来的图像更加有效。
图像增强技术主要有直方图修改处理、图像平滑化处理、图像尖锐化处理和彩色处理技术等。
本实验以直方图均衡化增强图像对比度的方法为主要内容,其他方法同学们可以在课后自行联系。
直方图是多种空间城处理技术的基础。
直方图操作能有效地用于图像增强。
除了提供有用的图像统计资料外,直方图固有的信息在其他图像处理应用中也是非常有用的,如图像压缩与分割。
直方图在软件中易于计算,也适用于商用硬件设备,因此,它们成为了实时图像处理的一个流行工具。
直方图是图像的最基本的统计特征,它反映的是图像的灰度值的分布情况。
直方图均衡化的目的是使图像在整个灰度值动态变化范围内的分布均匀化,改善图像的亮度分布状态,增强图像的视觉效果。
灰度直方图是图像预处理中涉及最广泛的基本概念之一。
图像的直方图事实上就是图像的亮度分布的概率密度函数,是一幅图像的所有象素集合的最基本的统计规律。
直方图反映了图像的明暗分布规律,可以通过图像变换进行直方图调整,获得较好的视觉效果。
直方图均衡化是通过灰度变换将一幅图像转换为另一幅具有均衡直方图,即在每个灰度级上都具有相同的象素点数的过程。
处理后的图像直方图分布更均匀了,图像在每个灰度级上都有像素点。
从处理前后的图像可以看出,许多在原始图像中看不清楚的细节在直方图均衡化处理后所得到的图像中都变得十分清晰。
三、实验内容给定一幅如下的图象,作如下增强处理操作:1. 用直接灰度变换方法进行对比度增强,设计分段线性变换函数,做增强处理;2.编写程序进行图像的直方图统计;3.编写程序进行图像的直方图修正。
直方图修正法分为直方图均衡化和直方图规定化目的:采用直方图修整后可使图像的灰度间距拉开或使灰度分布均匀,从而增大反差,使图像细节清晰,从而增强图像。
1.直方图均衡化通过对原图像进行某种变换使原图像的灰度直方图修正为均匀的直方图的一种方法以r 和s 分别表示归一化了的原图像灰度和经直方图修正后的图像灰度。
即 1,0≤≤s r 在[]1,0区间内的任一个r ,经变换T (r )都可产生一个S ,且 S=T(r)T(r)为变换函数,应满足下列条件:(1)在10≤≤r 内为单调递增函数(保证灰度级从黑到白的次序不变);(2)在10≤≤r 内,有1)(0≤≤r T 。
(确保映射后的像素灰度在允许的范围内) 由概率论理论可知,如果已知随机变量r 的概率密度为)(r p r ,而随机变量s 是r 的函数,则s 的概率密度)(s p s 可以由)(r p r 求出。
假定随机变量s 的分布函数用)(s F s 表示,根据分布函数定义,则有⎰⎰∞-∞-==s r r s s dr r ds s s p p F )()()([])()(1s dsd s T p p r s -=⇒ (1) 因为归一化假定 1)(=s p s由(1)得dr r ds p r )(= 两边积分得 ⎰==rrdr r r T s p 0)()( (变换函数) 上式表明当变换函数T (r )是原图像直方图累积分布函数时,能达到直方图均衡化的目的。
对于灰度级为离散的数字图像,用频率来代替概率。
∑∑=====k j k j j j r k k n r T n r p s 00)()(1,,2,1,0,10-=≤≤L k r k2.直方图规定化(直方图匹配)使原图像灰度直方图变成规定形状的直方图而对图像作修正的增强方法。
假设)(r p r 和)(z p z分别表示已归一化的原图像灰度概率密度函数和希望得到的图像概率密度函数。
首先对原图像进行直方图均衡化处理,即求变换函数:⎰==rrdr r r T s p 0)()( 假定已得到了所希望的图像,对它也进行均衡化处理,即⎰==zzdr r z G v p 0)()( (2) 它的逆变换是 )(1v z G -=即由均衡化后的灰度级得到希望图像的灰度级。
数字图像处理入门—直方图修正和彩色变换这次,我们主要和调色板打交道。
先从最简单的反色讲起。
1. 反色(invert)反色就是形成底片效果。
如下图所示,图2为图1反色后的结果图1. 原图图2. 图1反色后的结果反色有时是很有用的,比如说,图1中黑色区域占绝大多数,这样打印起来很费墨,我们可以先进行反色处理再打印。
反色的实际含义是将R,G,B值反转。
若颜色的量化级别是256,则新图的R,G,B值为255减去原图的R,G,B值。
这里针对的是所有图,包括真彩图,带调色板的彩色图(又称为伪彩色图),和灰度图。
针对不同种类有不同的处理。
先看看真彩图。
我们知道真彩图不带调色板,每个像素用3个字节,表示R,G,B三个分量。
所以处理很简单,把反转后的R,G,B值写入新图即可。
再来看看带调色板的彩色图,我们知道位图中的数据只是对应调色板中的一个索引值,我们只需要将调色板中的颜色反转,形成新调色板,而位图数据不用动,就能够实现反转。
灰度图是一种特殊的伪彩色图,只不过调色板中的R,G,B值都是一样的而已。
所以反转的处理和上面讲的一样。
这里,我想澄清一个概念。
过去我们讲二值图时,一直都说成黑白图。
二值位图一定是黑白的吗?答案是不一定。
我们安装Windows95时看到的那幅setup.bmp是由蓝色和黑色组成的,但它实际上是二值图。
原来,它的调色板中的两种颜色是黑与蓝,而不是黑与白。
所以说二值图也可以是彩色的,只不过一般情况下是黑白图而已。
实现反色的源程序2. 彩色图转灰度图(color to grayscale)我们在第二讲时提到了YUV的颜色表示方法,知道在这种表示方法中,Y分量的物理含义就是亮度,它含了灰度图的所有信息,只用Y分量就完全能够表示出一幅灰度图来。
YUV和RGB之间有着如下的对应关系。
我们利用上式,根据R,G,B的值求出Y值后,将R,G,B值都赋值成Y,就能表示出灰度图来,这就是彩色图转灰度图的原理。
先看看真彩图。
实验五图像直方图修正一、实验目的1.掌握灰度直方图的概念及其计算方法;2.熟练掌握直方图均衡化的计算过程;3.学会利用MATLAB实现图像的直方图均衡化。
二、实验原理灰度直方图是一个离散函数,它表示数字图像每一灰度级出现频率的对应关系。
1.直方图的概念设图像的灰度范围为[a,b],r为此灰度范围内的任一灰度级,p(r)为这幅图像中灰度级为r的象素出现的频率,p(r)函数的图形称为这幅图像的直方图。
2.直方图均衡化把原始图的直方图变换为均匀分布的形式,此时图像的熵最大,图像所包含的信息量最大。
3.所用函数灰度调整函数:imadjust,绘制直方图:imhist,直方图均衡化:histeq三、实验内容1.读入MATLAB自带索引图像“kids.tif”,显示索引图像和其直方图。
[I,I_map]=imread('kids.tif');I1=imhist(I,I_map);subplot(121),imshow(I,I_map);subplot(122),imhist(I,I_map);2.读入MATLAB自带图像“pout.tif”,将其进行灰度级拉伸:最低灰度变成黑色,最高灰度变成白色,显示拉伸前后的图像,并新建一个图像窗口,显示两个直方图。
最后,分析拉伸后图像与其直方图的特点。
I=imread('pout.tif');J=imadjust(I,[0.1 0.9]);subplot(121), imshow(I);subplot(122), imshow(J);figure, subplot(121), imhist(I);subplot(122), imhist(J);3.读入MATLAB自带图像“tire.tif”,对其进行直方图均衡化,用一个2*2的子图显示原始图像、均衡化后的图像及均衡化前后的直方图。
I = imread('tire.tif');J = histeq(I);subplot(2,2,1),imshow(I);subplot(2,2,2),imshow(J);subplot(2,2,3),imhist(I,64);subplot(2,2,4), imhist(J,64);四、实验仪器1. 计算机;2. MATLAB软件;3. 记录用的笔、纸。
直方图修正法
分为直方图均衡化和直方图规定化
目的:采用直方图修整后可使图像的灰度间距拉开或使灰度分布均匀,从而增大反差,使图像细节清晰,从而增强图像。
1.直方图均衡化
通过对原图像进行某种变换使原图像的灰度直方图修正为均匀的直方图的一种方法
以r 和s 分别表示归一化了的原图像灰度和经直方图修正后的图像灰度。
即 1,0≤≤s r 在[]1,0区间内的任一个r ,经变换T (r )都可产生一个S ,且 S=T(r)
T(r)为变换函数,应满足下列条件:
(1)在10≤≤r 内为单调递增函数(保证灰度级从黑到白的次序不变);
(2)在10≤≤r 内,有1)(0≤≤r T 。
(确保映射后的像素灰度在允许的范围内) 由概率论理论可知,如果已知随机变量r 的概率密度为
)(r p r ,而随机变量s 是r 的函数,则s 的概率密度)(s p s 可以由)(r p r 求出。
假定随机变量s 的分布函数
用)(s F s 表示,根据分布函数定义,则有
⎰⎰∞-∞-==
s r r s s dr r ds s s p p F )()()([])()(1s ds
d s T p p r s -=⇒ (1) 因为归一化假定 1)(=s p s
由(1)得dr r ds p r )(= 两边积分得 ⎰==r
r
dr r r T s p 0)()( (变换函数) 上式表明当变换函数T (r )是原图像直方图累积分布函数时,能达到直方图均衡化的目的。
对于灰度级为离散的数字图像,用频率来代替概率。
∑∑=====k j k j j j r k k n r T n r p s 00)()(
1,,2,1,0,10-=≤≤L k r k
2.直方图规定化(直方图匹配)
使原图像灰度直方图变成规定形状的直方图而对图像作修正的增强方法。
假设)(r p r 和)(z p z
分别表示已归一化的原图像灰度概率密度函数和希望得到
的图像概率密度函数。
首先对原图像进行直方图均衡化处理,即求变换函数:
⎰==r
r
dr r r T s p 0)()( 假定已得到了所希望的图像,对它也进行均衡化处理,即
⎰==z
z
dr r z G v p 0)()( (2) 它的逆变换是 )(1v z G -=
即由均衡化后的灰度级得到希望图像的灰度级。
这样,如果我们用原图像均衡得到的灰度来代替变换中的v , 其结果为 )(1s z G -=
假定)(1s G -是单值的,根据上述思想,总结出直方图规定化增强处理的步骤如下:
(1)对原始图像作直方图均衡化处理;
(2)按照希望得到的图像的灰度级概率密度函数
)(z p z ,由式(2)求得变换函数G (z );
(3)用步骤(1)得到的灰度级S 作逆变换)(1s z G -=。
那么经过以上得到的图像的灰度级分布将具有规定的概率密度函数)(z p z 的形状。
当)()(1r T r G =-时,直方图规定化处理就简化为直方图均衡化处理了。