带钢电液伺服纠偏系统
- 格式:doc
- 大小:25.00 KB
- 文档页数:5
带钢纠偏控制系统设计作者:王佳佳高晓丁聂兆明李远朝来源:《电子世界》2012年第24期【摘要】本设计是针对钢带在卷取机上绕卷运行时发生的左右偏移而提出控制方案及具体处理方法。
采用智能PID控制算法,对钢带的偏移量进行实时的控制,使之在左右偏移时偏移量控制在安全的范围内。
主要是对系统数学模型的建立和数据处理的算法分析。
【关键词】钢带;纠偏控制;智能PID控制;卷取机1.引言钢带纠偏控制是指钢性卷材在喷涂、印刷、冲切、层合、分切或其它绕卷过程中始终要保持钢性卷材侧面整齐一致而采取的技术操作。
卷材边缘一旦没有对齐就会引起后续的工步出错,导致材料浪费或停工调整。
所以在加工处理钢性卷材时需要对偏移的钢性卷材进行及时的纠偏操作。
2.控制系统的组成系统的组成如图1所示,由基于AT89C52处理器、光电传感器、数模及模数转换模块、伺服放大器及配套的伺服阀、位置传感器、液压缸及其配套的液压设备等组成。
3.控制系统的数学模型与算法实现3.2 算法实现该控制系统实现的是对钢带位置偏差信号的实时控制,而PID控制算法是被工程实际有力地证明了的先进控制算法,其算法简单、鲁棒性好、可靠性高。
在工程实际中,微分环节D很难控制,因为它对噪声比较敏感,抗噪声干扰性差。
所以本设计采用PI调节器,采用参数自调整规则以适应不同的工况,参数自调整PI调节器结构如图3所示。
4.MATLAB仿真分析控制系统设计完成后,对控制算法进行了MATLAB/SIMULINK仿真实验,并对仿真结果进行分析,参数自调整PI控制时的阶跃输入仿真曲线如图4所示。
仿真实验结果表明,控制器从不到2ms的时间开始响应,满足系统的要求,而且控制变化量平稳过渡超调量较小具有很好的鲁棒性和总体快速性。
仿真实验结果显示了该系统的控制效果良好。
5.结束语本设计主要研究的是对带钢在运行过程中出现的偏差进行实时的控制,以保证偏差在安全生产的范围内。
系统采用现在较流行的PID算法,使得系统的控制精度大大提高、系统的稳定性更好。
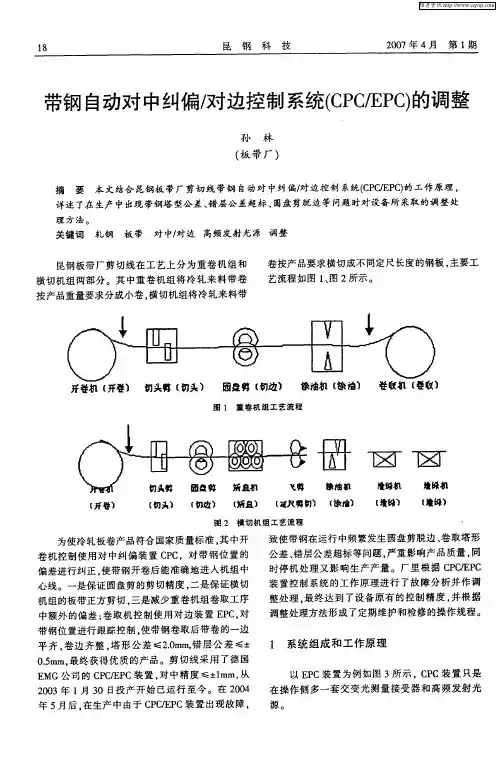
EMG带钢纠偏系统在冷轧的应用与及维护I. 绪论A. 研究背景及意义B. 现有问题分析C. 研究目的II. EMG带钢纠偏系统的原理介绍A. 系统构成B. 工作原理C. 优点分析III. EMG带钢纠偏系统在冷轧中的应用A. 系统使用流程B. 应用场景分析C. 应用效果评估IV. EMG带钢纠偏系统维护及故障排除A. 系统维护方法B. 故障排除流程C. 维护经验总结V. 未来研究方向A. 研究现状分析B. 发展趋势预测C. 优化设计建议VI. 结论A. 研究成果总结B. 研究意义再探讨C. 后续发展策略建议I. 绪论A. 研究背景及意义随着冷轧带钢的需求不断增加,带钢纠偏系统在钢铁工业中的应用也逐渐扩大。
然而,传统的带钢纠偏系统存在一些缺陷,如操作不便,维护困难,精度不高等问题。
针对这些问题,人们提出了一种新型的带钢纠偏系统-- EMG带钢纠偏系统,该系统采用电磁力平衡技术和精密传感技术,可以实现高精度的纠偏效果。
B. 现有问题分析传统的带钢纠偏系统采用机械力平衡技术,由于机械部件易于磨损,且常常受到环境温度变化等因素的影响,其纠偏精度较低。
此外,传统的带钢纠偏系统操作复杂,维修困难,而且在长期使用过程中,会逐渐失去灵活性和纠偏精度,从而导致带钢加工出现误差。
C. 研究目的本论文旨在探讨 EMG带钢纠偏系统的原理、应用及维护。
通过对该系统的研究分析,我们可以深入了解其原理和应用特点,为该系统的普及和推广提供理论支持。
此外,本论文还会探讨EMG带钢纠偏系统的维护方法和故障排除流程,为用户提供了可靠的维护保障。
最后,我们将在总结中展望该系统的未来发展方向,以期为相关领域的研究和实践提供一定的借鉴和指导。
II. EMG带钢纠偏系统的原理介绍A. 系统构成EMG带钢纠偏系统主要由电磁力平衡装置、带钢传感器、控制系统和供电系统等组成。
其中,电磁力平衡装置是核心部件,采用电磁力平衡技术,可生成与带钢误差方向相反的力矩,从而实现带钢纠偏。
IMH2测量精确 耐温高达1100 o C 免维护高温型电感式带钢对中测量根据电磁场感应的原理,在被测量带钢的两侧边部上下水平放置两套对中传感器并与带钢中心对称布置;带钢上方的对中传感器内有两个发射传感器,带钢下方的对中传感器内有两个接收传感器,发射传感器所发射的磁场方向垂直与带钢边部到接收传感器。
信号处理装置提供一个频率和频幅可调节的正弦波交流电压给电感发射传感器,电感发射线圈所产生的交变磁场感应到接收传感器;接收传感器被感应到的磁通量的大小取决于带钢的位置。
频幅的大小变化所产生的交流电压经过计算转换为模拟输出信号,最终得到带钢的边部位置。
对于带钢对中纠偏来说,来自两个相同的干扰分别作用于两个接收传感器,这种干扰可以抵消。
70年代早期电感原理传感器首次在酸洗线酸槽中应用1980-1993年 用带有IR-CUT 滤网的摄像头检测带钢与炉内背景光之间的明暗对比测量带钢边缘位置1992-1994年 开发研制炉内高温型电感式传感器1993年 第一套高温型电感式传感器在炉内应用1998年对高温型电感式传感器 进行改进,取消陶瓷保护套管2004-2005年 重新设计新一代传感器至今300多套高温型电感式带钢对中系统在炉内运行成功的应用历史为保证产品质量,EMG 工厂有特殊设计的加热炉,用于炉内电感式传感器的出厂测试。
E M G 高温型电感式带钢对中测量的应用炉内纠偏辊架ESZ 电动伺服推杆水冷/空冷电控柜IMH2高温型电感式传感器• contactless• cost-effective• maintenance-freeTwo double flanges are welded to the furnace walls so that they are gas-tight. They are used tosupport and seal the cross beams.Two temperature resistant rectangular metal cross beams with special, heat-resistant sensor coils which are installed from one side of the fur-nace by the customer.To protect the sensor system, particularly in case of strip breakage, mechanical deflectors are recom-mended.On request we will be glad to give our customers information about how to design and where to mount the mechanical defl ectors.Shock protection• 对改造或新建炉子设计容易• 高温条件工作稳定、高精度保证• 测量不受炉内蒸汽和金属粉尘的影响• 减少带钢的炉内断带• 安装简便、操作容易• 安全防护设计• 无易损更换件• 使用寿命长客户利益高温型传感器IMM2IMH2IMU2适用最高炉内温度650 °C950 °C1100 °C适用带钢宽度范围500...2850 mm (取决于传感器安装位置)系统保证精度± 5 mm 传感器距金属保护梁最小距离200 mm 端子盒适应环境温度0...+80 °C 端子盒保护等级IP54信号处理箱BMI 04.19供电电压110 / 120 / 220 / 230 / 240 V; 50 - 60 Hz 功率60 V A 适应环境温度0...50 °C信号输出CAN-bus总线EB S T P r o M a r k T e c h n o l o g i e s , I n c .U .S .A .E M H -E l e c t r o m e c ân i c a e H i d r áu l i c a L t d a .B r a z i lB S T I n t e r n a t i o n a l G m b HG e r m a n yE M G ,F a c t o r y E L T M AG e r m a n yB S T S a y o n a A u t o m a t i o n s P r i v a t e L t d .I n d i a E M G A u t o m a t i o n G m b HG e r m a n yE M G A u t o m a t i o n (B e i j i n g ) L t d .C h i n a。
带钢的跑偏及纠偏研究摘要:针对带钢的跑偏问题,对各种影响因素而出现的跑偏加以说明、分析。
提出采用控制辊系统纠偏方式,并对其纠偏方式进行分析、探讨。
该方法能有效地解决带钢跑偏问题。
关键词:带钢;跑偏;张力;纠偏1 引言在现代化连续热镀锌作业线中,带钢全长数千米,要保证机组高效率作业,并使带钢无故障运送,并且卷取时边缘整齐,这是比较困难的。
特别是近年来,随着热镀锌工艺设备的不断改进、机组运行速度逐年的提高,加工的带钢趋向又薄又宽,所以让带钢对中运行不跑偏是一个非常棘手的问题。
据统计,机组中断带率的70%是由于带钢跑偏所造成的[1]。
为适应带钢快速连续生产,这就必须对带钢运送的跑偏和纠偏进行研究。
2 带钢跑偏分析带钢在辊子上行走,只要带钢和辊子表面有接触,并在一定的摩擦阻力界限内,那么带钢上各点就会和辊子的中心线成直角行走。
带钢的张力是平均分布的,即当带钢靠上辊子时,带钢就会垂直于辊子的中心轴行走。
带钢在运送辊上行走,如果运送辊是相互平行的,带钢与辊子之间接触在摩擦阻力界限之内,带钢平直,断面薄厚均匀,则作用在带钢上的张力分布均匀。
这样,带钢在辊子上行走就不会跑偏,即能保持在运行中心无侧向位移。
但实际上在带钢的运送中,会有各种扰动引起带钢的跑偏。
2.1 带钢镰刀弯的影响钢板及钢带的镰刀弯,是指侧边与连接测量部分两端点的直线之间的最大距离。
它在产品呈凹形的一侧测量。
钢带镰刀弯的测量部位是在距钢带头部或尾部不小于5000mm处。
长度不大于2000mm的钢板,钢板的长度即镰刀弯的测量长度;长度大于2000mm的钢板,可任取2000mm长度进行镰刀弯的测量[2],如图1所示。
图1 镰刀弯测量示意图如果带钢断面不均匀,带钢两边厚度不一,带钢本身就成镰刀弯状,则带钢在辊子上运行,就会引起干扰,使带钢跑偏。
因为此类带钢上的各点,也趋向与辊子中心线成直角,引起跑偏量。
如图2 所示。
图2 带钢断面不均匀引起的跑偏量这种镰刀弯引起的带钢在平行运送辊上的跑偏,其跑偏量与镰刀弯的程度、带钢张力的大小和两个运送辊之间的间距有关。
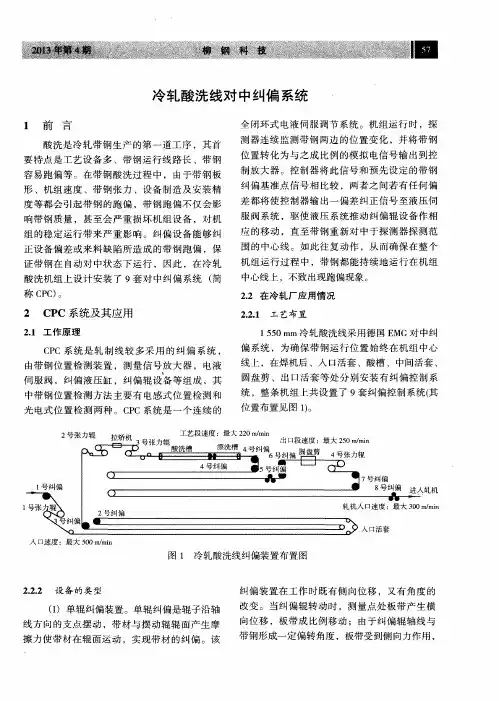
EPC 开卷机对边纠偏系统►系统简介带材纠偏电液伺服系统是集光、机、电、液四方面有机结合在一起的全闭环电液伺服系统,是用途广泛的机电一体化高新技术产品。
它具有响应快、精度高、寿命长、稳定性好等特点。
它可广泛地应用于机械、冶金、造纸、橡胶、织带、纺织印染、电镀、塑膜胶片、等诸多行业的不同种类的带材生产线的在线纠偏。
►应用场合板带纠偏系统可用于下列钢铁及有色金属板带连续生产线的开卷、卷取及机组中间段的在线纠偏控制:热浸镀锌及电镀锌生产线、彩色涂层生产线、镀锡处理线、酸洗处理线、退火及酸洗处理线、连续轧制及酸洗处理线、连续轧制生产线、连续退火生产线、拉弯矫直机列线►开卷机对边纠偏系统系统采用闭环伺服控制,预先设定好带材被监测边的目标位置(纠偏零点)。
机列运行时,对边探测器监测带材被控边的横向位置变化并转化成电信号输出到控制放大器,控制器将此信号和纠偏零点信号相比较,若有任何偏差便输出一相应的偏差纠正信号至伺服阀。
伺服阀将信号转换为大功率的液压能,驱动液压油缸推动开卷机作相应移动,直至带材被控边重新回到目标位置。
►开卷机对边纠偏伺服控制示意图►配置说明1.光电对边传感器2.比例伺服控制柜3.比例伺服阀4.伺服油源(根据纠偏速度要求选择)5.伺服油缸(根据放卷机重量选择)6.位移传感器(根据用户要求选择)CPC板带偏转式纠偏架纠偏►系统简介带材纠偏电液伺服系统是集光、机、电、液四方面有机结合在一起的全闭服系统,是用途广泛的机电一体化高新技术产品。
它具有响应快、精度高稳定性好等特点。
它可广泛地应用于机械、冶金、造纸、橡胶、织带、纺电镀、塑膜胶片、等诸多行业的不同种类的带材生产线的在线纠偏。
►应用场合板带纠偏系统可用于下列钢铁及有色金属板带连续生产线的开卷、卷取及机组中间段的在线纠偏控制:热浸镀锌及电镀锌生产线、彩色涂层生产线、镀锡处理线、酸洗处理线、退火及酸洗处理线连续轧制及酸洗处理线、连续轧制生产线、连续退火生产线、拉弯矫直机列线►板带偏转式纠偏架纠偏本系统适用于进带跨距较长的机组中间段的对中纠偏,本系统依靠无固定偏转中心的纠偏架发生偏转时带动带材一起而实现对中纠偏控制。
液压纠偏系统简介一、概述:随着现代化轧机速度的提高,对带钢的传送速度也大大的提高了,这样相应的辅助设备的速度也必须提高。
为保证带钢在轧制过程中在轧制中心线附近运行,且保证卷取时带卷边缘整齐,从而防止因带材偏离轧制中心线发生的刮坏设备或带材边缘损坏,影响产品质量的事故发生,同时大量减少带边剪切量。
所以带钢的边缘控制和机组上的对中控制是带材连续作业上必不可少的环节。
产生带钢偏离轧制中心线的原因有多种,主要是辊系的倾斜,带钢厚度不均、辊距与带钢宽度的比值、辊型结构、带钢的张力等,假设参数选择不当都会引起带钢偏离轧制中心线,所以带钢在运行过程中的横向偏离中心线是不可防止的,必须加以控制。
常用的控制方式有四种:1、机械式:如能自动定心的双锥辊,导向轨等。
2、电动式:采用光电检测器,将偏离信号送至控制柜,从而控制直流电机进行纠偏。
3、气液方式:采用气动检测喷嘴,通过膜片控制射流管喷射的油压推动滑阀控制油缸进行纠偏。
4、光电液方式:采用光电检测器将偏离信号经放大器放大,控制电液伺服阀推动油缸进行纠偏。
这四种控制方式中前三种纠偏速度较慢,满足不了现代化高速生产的需要。
而第四种控制方式采用的是电液伺服控制,这种控制方式的信号传输快,电反馈和校正方便,它的检测精度高,检测光电头距离大可达一米左右,可直接方便的装在带钢运行线路上。
而且系统动态性能好。
因此本设计中我采用光电液控制方式。
按控制对象不同可分开卷机、卷取机和摆动辊三种。
为了保证在轧制过程中带材边缘位置不变,保持在轧制中心线附近运行,控制误差为±1~2mm,因此,我在本设计中采用了开卷机边缘控制方式。
二、冷轧带钢液压纠偏系统的组成和工作原理1、组成:如图〔一〕所示该系统由光电检测器〔包括液压缸〕,放大器,比较器,电液伺服阀,开卷机〔两个,左右两缸〕组成。
2、工作原理:由光电检测器将检测所得的位移信号经反馈到比较器与所给定的位置信号进行比较得到一位置偏差信号,该信号经放大器进行放大,转变成较大的电信号,由此放大后的电信号控制电液伺服阀。
伺服纠偏系统是一种自动控制系统,常用于纸张、薄膜、布匹等连续生产线上,实现材料的高精度横向位置控制,以保持材料的直线运行,避免跑偏。
其工作原理主要包括以下几个部分:
1. 检测单元:首先,系统通过光电传感器、超声波传感器、接触式传感器等检测装置实时监测材料的实际运行位置,与设定的标准位置进行比较。
2. 信号处理与反馈:一旦检测到材料偏离预设的中心线或基准线,传感器将把偏差信号转化为电信号,并将其反馈给控制器。
3. 控制器计算:控制器接收到偏差信号后,根据预设的控制算法快速计算出需要的纠正动作和幅度。
4. 伺服驱动器执行:控制器输出指令给伺服电机的伺服驱动器,驱动器根据指令调节伺服电机的转速、转向或旋转角度,进而带动机械结构如滚轮或导向机构做出相应的位移调整,使材料回归到正确的位置上。
5. 闭环控制:伺服纠偏系统采用闭环控制策略,即不
断地检测-反馈-校正的过程,确保在材料运行过程中持续、动态地进行位置修正,以达到高精度纠偏的目的。
简而言之,伺服纠偏系统通过精密的检测、实时的信号处理、精准的电机控制和高效的闭环反馈机制,实现了对生产线上传输物料位置的自动、精确调整。
目录1 绪论 (2)1.1 概述 (2)1.1.1 研究背景 (2)1.1.2 研究现状 (3)1.1.3 发展方向 (5)1.2 纠偏电液伺服控制系统的特点和构成 (6)1.3 发展趋势 (6)2 卷取机纠偏控制系统设计 (8)2.1 卷取机工作原理 (8)2.1.1 卷取机的应用 (8)2.1.2 工作方式分析 (8)图2.1卷取机简图 (9)2.2 带钢纠偏控制系统原理 (9)2.2.1 带钢纠偏控制系统的介绍 (10)2.2.2 带钢纠偏控制系统工作原理 (10)2.3 控制系统设计 (10)2.3.1 控制对象的参数 (10)2.3.2 控制系统设计方案 (11)2.3.3 纠偏液压站原理图设计 (11)2.4 系统元件设计选型 (12)2.4.1 光电传感器设计 (12)3 元件的动力学分析和主要参数的确定 (14)3.1 电液伺服阀简介 (14)3.2 系统技术参数计算 (14)3.3 初选系统压力 (15)3.4 对称液压缸的主要参数 (15)3.5 计算对称液压缸的工作压力、流量和功率 (16)3.5.1 计算对称液压缸的工作压力 (16)3.5.2 对称液压缸工作所需的流量 (17)3.5.3 计算对称液压缸的输出功率 (17)3.6 液压控制系统动力元件参数的确定 (17)3.6.1 确定动力元件(伺服阀)参数 (17)3.6.2 动力元件(伺服阀)的选择 (18)3.6.3 液压泵及电机的选型 (18)3.6.4 液压阀的选型 (18)3.7 液压辅件的设计计算与选型 (19)3.7.1 油箱的设计 (19)3.7.2 阀块的设计 (20)3.7.3 管道尺寸的确定 (21)3.7.4 其它元件的选型 (22)3.7.5 液压油的选用 (22)参考文献 (24)1绪论1.1概述电液伺服阀是闭环控制系统中最重要的一种伺服控制元件,它能将微弱的电信号转换成大功率的液压信号(流量和压力)。
钢带纠偏系统的工作原理
钢带纠偏系统是一种用于纠偏钢带(如钢带输送机中的输送带)的装置,可以确保钢带的正常运行和减少偏离轨道的情况。
其工作原理一般包括以下几个步骤:
1. 传感器检测:系统安装了一个或多个传感器,用来检测钢带是否偏离轨道。
常见的传感器包括光电传感器、激光传感器等。
2. 信号传输:传感器检测到钢带偏离轨道后,会发出信号,将信号传输给控制系统。
3. 控制系统处理:控制系统接收到传感器发出的信号后,会根据信号的反馈信息判断钢带的偏移方向和偏移程度。
4. 纠偏装置调整:根据控制系统的判断结果,控制系统会激活纠偏装置,通过调整纠偏辊或其他装置来使钢带回到正确的轨道上。
纠偏装置可以通过液压或电动机等方式进行调整,以实现钢带的自动纠偏。
5. 反馈调整:在纠偏装置调整过程中,控制系统不断监测钢带的位置,如果钢带仍然偏离轨道,控制系统会不断调整纠偏装置来使钢带回到正确的轨道上。
通过以上步骤的连续循环,钢带纠偏系统能够实时监测和调整钢带的位置,确保其保持在正确的轨道上,从而提高输送带的运行效率和安全性。
带钢电液伺服纠偏系统研究
摘要:电液伺服纠偏系统在带钢卷取控制中具有重要的意义。
本文建立了电液伺服纠偏系统的传递函数模型,推导了控制器参数,最终设计了基于plc的电液伺服纠偏控制系统,实际应用表明该系统具有较高的控制精度与较高的可靠性。
关键词:电液伺服纠偏带钢 plc
中图分类号:tb 文献标识码:a 文章编号:1007-0745(2013)05-0364-02
0 引言
纠偏控制以电液技术为基础,带钢跑偏的检测方式多样,按其跑偏量检测原理可分为光电检测、电感检测、电容检测三类。
纠偏控制一般采用如下三种方式:第一种为单辊纠偏,其作用为保证带钢进入活套前位置适中,具体为在一段较长的自由运行后,带钢以90度夹角卷绕纠偏辊,利用卷绕效应的物理作用,带钢偏差会被校正到一定范围之内。
当自由的钢带进带距离和出带距离较长时,一般让带钢绕180度经过纠偏辊。
纠偏作用机理为:驱动两根倾斜的连杆转动,带动纠偏辊机架旋转,带钢与纠偏辊中心形成一定的夹角(积分作用),另一个作用为强制带钢横向移动(比例作用)。
因此,纠偏机架旋转产生的比例积分的控制作用。
该类纠偏一方面对出带位置进行纠正,另一方面对近带也起到一定的纠偏作用,测量信号获取部分一般放置在出带侧。
第二种为双辊纠偏,其应用场合为有改变两个带钢运行高度的需求时(如活套的出入口),必须使
用双辊纠偏机架过渡作用,起到比例调节的效果。
该类型的纠偏机架突出优点为仅需较短的自由进出带距离即完成纠偏,因此,可应用在机组设备较密集的位置。
工作原理为纠偏辊在进带平面上以一个固定转轴为中心而转动,使带钢的出带部分横向移动。
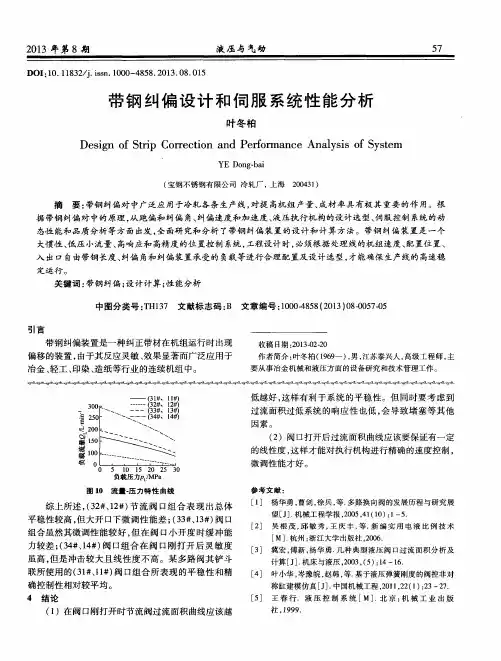
此时纠偏辊并不能纠正进带的跑偏,但对纠正出带位置具有重要作用,作用为使带钢回到设定的中心位置。
带钢运行时的纠偏量与纠偏机架的调节距离为近似比例关系,进带和出带与转动平面的夹角为90度,纠偏性能取决于进带与出带之间的相对距离,该类测量装置信号获取也在出带侧。
第三种为三辊对中:在带钢张力较大或带钢较厚的特殊工况下,一般可应用三辊纠偏,其技术有点为带钢不必在辊上绕向即能实现带钢的纠正。
为增强纠偏效果,带钢和纠偏辊之间需具有一定的摩擦力,摩擦力的大小可通过辊子本身的直径或上辊的下压力来共同确定。
其结构特征为在转动的机架上装三个辊子,依靠两根连杆支撑移动运动,带钢与辊面之间的夹角产生积分作用,带钢横向移动产生比例作用,除对出带位置与进带均有纠偏效果。
许多研究人员对带钢纠偏做了详细的研究,如文献[1]设计了基于比例阀控制的电液伺服纠偏系统,并进行数学建模与matlab仿真研究。
文献[2]采用ccd作为信号采集元件,设计了基于换向阀的伺服纠偏系统。
文献[3]提出了一种基于图像处理技术采集跑偏信息的电液位置伺服纠偏系统。
文献[4]设计一种基于光电纠偏技术的电液伺服系统,并在带材清洗机列卷取机自动对中系统中成功应用。
本研究提出一种采用差动光电原理的带钢跑偏检测方法,设计了纠偏伺服机架,对系统进行数学建模,最终设计了电液伺服系统,实现带钢的纠偏控制。
1 系统主要组成
1.1 光电检测原理
光电检测工作原理如图1所示,荧光灯光源s提供高频光源,频率为1000hz,功率为50w。
带材t遮挡光路,光电检测器透镜组l获得经带材遮挡后的光,并经光敏元件d感知,位置信号电压先经色度补偿选频并放大,再经带通滤波器滤波与电压整形变换,最后输出与位置信号成线性的稳定、高可靠信号。
光电检测系统经实验室调试,输出跑偏信号电压与钢带遮光位置在较大范围内成接近比例。
跑偏信号电压经标准化处理为4-20ma电流,可被单片机或plc采集。
为保证系统工作可靠性,在光电检测系统中设计断光保护输出电路,当光敏三极管无法获得足够强度的光源时,输出断光信号,保证系统可靠运行。
1.2 纠偏机架设计
由于带钢纵向或横向浪形、边缘浪形、中部浪瓢、歪扭、镰刀弯、厚度变化、表面粗糙度及张力变化等原因,造成带钢在运行过程中的侧向滑移与螺旋漂移,其中螺旋漂移作用为主导因素。
本研究主要分析其对中纠偏作用的水平单辊,纠偏机架如图2所示。
整套纠偏机架固定在水泥浇注的基础地基上,纠偏位于上部为纠偏辊,其转动方向由底部油缸推动机架可动部分旋转来确定。
1.3电液伺服阀控缸原理
电液伺服阀控缸原理如图3所示。
式中,ql为系统流量;kq为流量增益;kc为流量-压力系数;xv为阀芯位移;pl为负载压差; ap为缸活塞面积;xp为活塞位移;ctp为总泄漏系数;vt为液压缸总压缩容积;βe为有效体积弹性模量;mt为活塞及负载折算到活塞上的总质量;bp为活塞及负载的粘性阻尼系数;k为负载弹簧刚度;fl为任意外负载力。
当k=0时,指令输入的传递函数可表示为:
2 系统总体结构
本文采用siemens s7-200 plc cpu224 xp型号,扩展a/d及d/a 模块,采集系统跑偏信息,并输出控制伺服阀进行纠偏。
联网选用工业以太网模块cp243-1。
如图4所示。
液压系统的伺服阀具有非线性、参数不确定性及外部的扰动等不利于性能提高因素,且扰动参数随工作状态与温度变化,因此纠偏电液控制系统的各主要参数在系统运行中有可能是时变的,其固定值可由标称值参数推导求得,设计系统目标为:当系统参数变化时,使系统输出量跟踪期望输入信号。
通过设定值与实际位置的比较,产生偏差信号,经过pid运算后,到 d/a口输出标准电流信号调节伺服阀控制电流,构成一个闭环恒值控制系统。
pid控制器具有的结构简单,易于控制,参数可调、高精度的优点,随着微机技术的迅速发展,数字pid控制器代替了原有的模拟pid控制器,使pid控制易于微机实现。
数字pid控制器一般采用位置式pid控制
算法或增量式pid控制算法,各有其应用场合。
pid控制器是一种线性控制器,通常控制量是给定量r(t)和输出量y(t)的偏差,即依靠偏差来纠正偏差:
由于计算机控制是一种采样控制,因此连续的pid控制算法不能直接运用,只能进行离散化进行控制,离散化由微机编程来实现。
3 结束语
本文根据电液伺服系统的工作原理以及物理构成建立了纠偏系统结构,结合的电液伺服系统模型参数,确定出系统的传递函数。
在阐述pid控制理论基础上,给出了出了针对电液伺服系统的pid 控制器算法,并最终设计了基于plc的电液伺服纠偏系统硬件结构,为工程应用奠定了坚实的基础。
参考文献:
[1]郑淑娟,贾建涛,段现银. 比例阀控电液纠偏系统的设计与分析 [j].机床与液压,2010,38(16):57~59.
[2]程丽华,杨晓明,毕友明. 一种通用的电液伺服带钢纠偏和对中控制系统[j]. 机床与液压,2004,(6):126~127.
[3]李锐,岑豫皖. 基于图像处理技术的带钢电液纠偏系统研究[j]. 液压与气动,2002,(11):11~13.
[4]李志宏.电液伺服系统在带材纠偏控制中的应用[j].有色金属加工,2003,32(6):36~38.。