机器人奇异点
- 格式:doc
- 大小:555.17 KB
- 文档页数:5

简述工业机器人奇异位种类英语## Types of Industrial Robot Singularities.Industrial robots are complex machines that can perform a wide range of tasks. However, there are certain limitations to their movement, and one of these is the presence of singularities. A singularity is a point in the robot's workspace where the robot loses one or more degrees of freedom. This can make it difficult or impossible for the robot to perform certain tasks.There are two main types of singularities:Kinematic singularities occur when the robot's joints reach their limits of motion. This can happen when the robot is trying to reach a point that is too far away, or when it is trying to move in a direction that is not allowed by its design.Dynamic singularities occur when the robot's forcesand moments are not balanced. This can happen when the robot is trying to lift a heavy object, or when it is trying to move quickly.Singularities can be a problem for industrial robots because they can cause the robot to lose control or to damage itself. It is important to be aware of the singularities of a robot before using it, so that you can avoid them.Here is a more detailed description of each type of singularity:### Kinematic Singularities.Kinematic singularities occur when the robot's joints reach their limits of motion. This can happen when the robot is trying to reach a point that is too far away, or when it is trying to move in a direction that is not allowed by its design.There are two types of kinematic singularities:Type 1 singularities occur when the robot's joints reach their maximum or minimum limits of motion. This can happen when the robot is trying to reach a point that is too far away, or when it is trying to move in a direction that is not allowed by its design.Type 2 singularities occur when the robot's joints are in a position where they are collinear or coplanar. This can happen when the robot is trying to move in a direction that is not allowed by its design.Kinematic singularities can be a problem because they can cause the robot to lose control or to damage itself. It is important to be aware of the kinematic singularities of a robot before using it, so that you can avoid them.### Dynamic Singularities.Dynamic singularities occur when the robot's forces and moments are not balanced. This can happen when the robot is trying to lift a heavy object, or when it is trying to movequickly.There are two types of dynamic singularities:Type 1 singularities occur when the robot's forces and moments are not balanced in a static sense. This can happen when the robot is trying to lift a heavy object, or when it is trying to move quickly.Type 2 singularities occur when the robot's forces and moments are not balanced in a dynamic sense. This can happen when the robot is trying to move quickly, or when it is trying to change direction.Dynamic singularities can be a problem because they can cause the robot to lose control or to damage itself. It is important to be aware of the dynamic singularities of a robot before using it, so that you can avoid them.### Avoiding Singularities.There are a number of ways to avoid singularities whenusing industrial robots. These include:Using a robot that is designed to avoid singularities. There are a number of robots on the market that are designed to avoid singularities. These robots typically have a larger workspace and a more flexible design than robots that are not designed to avoid singularities.Programming the robot to avoid singularities. It is possible to program a robot to avoid singularities by using a technique called singularity avoidance. Singularity avoidance algorithms are designed to find a path for the robot that avoids singularities.Using a sensor to detect singularities. It is possible to use a sensor to detect singularities. This type of sensor can be used to stop the robot before it reaches a singularity.By following these tips, you can avoid singularities when using industrial robots. This will help to keep your robot safe and productive.。
教你如何避开机器人这三类“奇点”机器人奇点是个让生产商和用户都很头痛的问题,碰上了,严重点可能造成“机毁人亡”。
那到底什么是机器人奇点,它是怎么形成的,怎么样才能避免机器人奇点?下面这篇文章由Robotiq公司的Alex Owen-Hill撰写,它能让你全面了解这些烦人的问题。
如果你对科学感兴趣,“奇点”很可能会让你想起黑洞。
自从美国LIGO实验室证明了引力波的存在之后,黑洞就被媒体广泛报道,为大众所熟知。
根据物理学家推论,在黑洞的中心,存在一个“引力奇点”,这意味着那里的引力非常大,甚至趋于无穷大。
机器人奇点的概念跟黑洞完全一样。
机器人奇点是什么?他们怎么会像黑洞一样?我的机器人要“疯”了想象一下,你想用你的机器人喷qiang画一条线,如果这条线想要画得完美,机器人需要以一个恒定的速度移动。
如果机器人改变速度,则这条线可能会有粗有细,看起来就不是很好。
如果机器人减速太多,我们可能会看到线上有难看的斑点。
很显然,在画线的时候,机器人以恒定的速度运动是非常重要的。
机器人是非常精确的。
在通常情况下,机器人可以处理好这个问题,无任何压力。
然而,如果在这条线上存在运动奇点,这项工作将不可能完成。
为什么会存在奇点?如何解决?有两种方式可以解决这个问题,但首先让我们了解一下发生了什么事情。
奇点趋于无穷大我在前面曾说过,黑洞中心的引力“趋于无穷大”。
这就意味着,你越靠近中心,引力会变得越大。
在黑洞的中心,引力在理论上是无限大的。
这也许不是真的(没有人知道),但这是一个数学特性。
数学可以很容易处理无穷的概念,而现实世界不能。
大量的数学方程趋于无穷大。
正如这位物理学家解释的那样,理论上来说,你每次拔下浴缸的塞子,都创造了一个奇点。
其基本原理就是,越接近孔的中心,水流越快。
根据这个理论,在孔的正中心,水流速度趋于无限快。
在现实中,却并非如此。
据我们所知,物理系统的速度并不能达到无限快。
机器人之所以会存在奇点,是因为机器人是由数学控制(它可以达到无限大),但移动的是真实的物理部件(它无法实现无限大)。
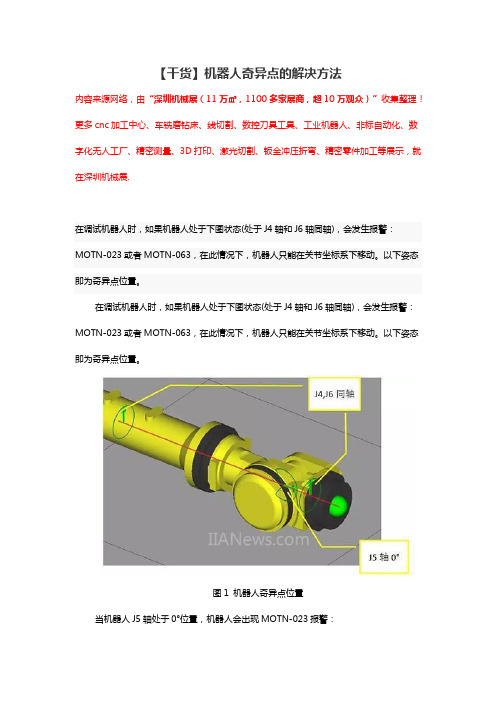
【干货】机器人奇异点的解决方法内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。
以下姿态即为奇异点位置。
在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。
以下姿态即为奇异点位置。
图1 机器人奇异点位置当机器人J5轴处于0°位置,机器人会出现MOTN-023报警:图2 MOTN-023报警当机器人在执行动作类型为L,C,A的动作指令时,如需经过奇异点,机器人会出现MOTN-063报警:图3 MOTN-063报警针对奇异点的处理方法情况一:在机器人示教时遇到奇异点处理步骤:a) 将机器人的示教坐标系切换到关节图2 示教坐标系的切换b) 点动机器人,让J5轴调离0°的位置,建议小于-3°或者大于3°c) 按RESET键复位报警情况二:在程序运行时遇到奇异点方法一:适合在无精细点位要求使用。
当运行程序时遇到奇异点,可以将该行动作指令的动作类型改为J,或者修改机器人的位置姿态,以避开路径当中存在的奇异点。
方法二:适合在有精细点位要求使用。
在动作指令后添加附加动作指令:手腕关节动作指令WJNT(全名Wrist Joint)。
手腕关节动作指令(Wrist Joint),不在轨迹控制中对手腕的姿势进行控制(标准设定下,程序运行时,手腕的姿势始终被控制)。
在直线动作、C圆弧动作、A圆弧动作时能够使用该指令。
当遇到奇异点时,程序中使用该指令,手腕的姿势在动作中发生变化,避开奇异点造成的手腕轴反转动作,使得工具中心点继续沿着轨迹动作。

软件界面与基本功能介绍总的来说,软件界面主要分为九大部分:标题栏、菜单栏(机器人编程、工艺包、自定义)、绘图区、机器人加工管理面板、调试面板、机器人控制面板、输出面板和状态栏等。
图示:软件界面●标题栏:显示软件名称和版本号;●菜单栏:涵盖了RobotArt的基本功能,如场景搭建、轨迹生成、仿真、后置、自定义等,是最常用的功能栏;●绘图区:用于场景搭建、轨迹的添加和编辑等;●机器人加工管理面板:由八大元素节点组成,包括场景、零件、工件坐标系、外部工具、快换工具、状态机、机器人以及工作单元等,通过面板中的树形结构可以轻松查看并管理机器人、工具和零件等对象的各种操作;●机器人控制面板:控制机器人六个轴和关节的运动,调整其姿态,显示坐标信息,读取机器人的关节值,以及使机器人回到机械零点等;●调试面板:方便查看并调整机器人姿态、编辑轨迹点特征;●输出面板:显示机器人执行的动作、指令、事件和轨迹点的状态;●状态栏:包括视向等功能。
1.机器人编程机器人编程,可进行场景搭建、轨迹设计、模拟仿真和后置生成代码等操作,包括“文件”“场景搭建”“基础编程”“工具”“显示”“高级编程”和“帮助”等七个功能分栏。
【文件】文件的新建、打开和保存。
RobotArt打开和保存的文件均为工程文件robx。
图示:文件菜单栏◎新建:创建空白工程文档。
◎打开:打开已存在的工程文件。
◎保存:保存当前工程文件到指定位置。
若是已有保存记录的文件,默认保存到原位置。
若是新建文件,保存时则会弹出对话框,选择保存位置。
◎另存为:将当前文件另存到指定位置。
【场景搭建】位置:位于【机器人编程】下的【场景搭建】中。
图示:“场景搭建”位置说明:完成一个完整的加工工艺需要机器人、工具、零件和工作台。
在正式规划机器人运动路径之前,需先进行场景搭建。
【机器人库】【工具库】【设备库】用来分别导入机器人、工具、零件、底座和状态机等。
●输入:支持多种格式的文件导入到RobotArt环境中。

工业机器人奇异位形的探讨与分析作者:蒋立军来源:《环球市场》2019年第11期摘要:多数新手在操作工业机器人时都会遇到奇点问题。
但是通过本文就可以从理论上理解奇点,以及如何在实际操作中避免奇点。
关键词:业机器人;奇异位;反向运动学一、奇异性分析当工业机器人非常奇异时,它们的表达是多种多样的:它们代表了代数中的雅可比矩阵奇点。
因此可以从不同角度分析机器人奇异配置。
有两种类型的奇异形状。
第一种是边界奇点。
当机器人制动器位于工作区域的边界时出现。
只要控制制动器远离工作区域的边界,这种奇异的配置就不是很严重。
第二种类型是内部奇异配置。
如果两个或更多个关节轴之间存在线性相关,则这种奇异的配置难以处理,因为它可能出现在工作区域的任何地方。
当机器人移动到奇异位置时,不利影响主要表现在三个方面。
首先,减少了机器人的实际操作自由度,使得制动器不能在某些方向上实现运动,同时减少了独立的内部关节变量的数量。
其次,一些关节角速度趋于无穷大,导致机器人失去控制,导致执行器偏离指定的轨道。
第三,雅可比矩阵降级,因此不能实现包括Jacobi在内的所有反演控制方案。
二、工业机器人常见的奇异点发生姿势分析由于奇异点与机械手臂的姿态相关,将六轴机械手臂的奇异点分为三个种类:(一)腕关节奇异点4轴与第6轴共线,矩阵不是满秩的会造成第4轴与第6轴瞬间旋转180度。
(二)肩关节奇异点当第一轴和腕关节点C的中心(第五轴和第六轴的交点)共线时,第一轴和第四轴瞬间旋转180度。
有一个特例。
当1轴与手腕中心共线并与第6軸共线时,系统将尝试瞬间将第一轴和第六轴旋转180度,这称为奇点。
(见图1、图2、图3)(三)肘关节奇异点当腕关节中心C点与第2轴、第3轴共平面时,会造成肘关节卡住,像是被锁住一般,无法再移动。
(见图4)三、现实运用中如何避免奇异的发生(一)当两个轴共线时经常出现奇点,机器人臂的轴数增加时,奇点出现的位置和机会同时增加。
但由于手臂越多,自由度就越大,因此避开奇异点的路线会更多。
机器人奇异点的理解每种型号的机器人都有奇异点,那么奇异点是如何产生产生的结果当机器人以笛卡尔坐标系运动时,经过奇点,某些轴的速度会突然变得很快,TCP点的路径速度会显着减慢。
因此,应避免机器人的轨迹经过奇点附近。
奇异点产生如下结果:1、机械臂自由度减少,从而无法实现某些运动2、某些关节角速度趋向于无穷大,导致失控3、无法求逆运算如何产生奇异点(singularity)说到奇异点的产生就不得不提一下的Gimbal Lock[2].如下图,飞机内部的陀螺仪有三个旋转的自由度,假设三个圈会随着飞机的旋转而旋转,旋转的轴线如上图:当其中pitch角向上达到90°时,其中一个圈与原本水平的圈在这一瞬间发生了重合,从而减少了一个自由度。
当然,飞机的旋转并没有真的被LOCK了,依然可以运动。
相同的情况同样可以发生在机器人上:6轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇点。
1、腕部奇点发生在4轴和6轴重合(平行)时。
2、肩部奇点发生在腕部中心位于1轴旋转中心线时。
3、肘部奇点发生在腕部中心和2轴3轴一条线。
4轴和6轴产生奇异点(wrist singularity)下图中的六轴机器人,四轴和六轴相交[3](大部分机器人四轴和六轴都会相交,所以很多机器人都会存在这种奇异点,这玩意跟机器人的品牌无关,只和结构有关).机器人的五轴与四轴和六轴的轴线相交,因此,机器人四,五,六三个轴便形成了上面提到的Gimbal Lock. 当五轴旋转到某个角度时,比如下面这个角度(所有的关节角度都是0°),四轴和六轴共线,奇异在此发生。
因此,在某系机器人仿真软件里,比如说ABB的robotstudio,当你打开机器人模型的时候,机器人的五轴会是这样的:耷拉着小脑袋真不是为了卖萌,而是为了避开奇异点。
除了这种奇异点,还有其他两种:1轴和6轴奇异点(Alignment singularity)三、当机器人的2轴和3轴产生奇异点(Elbow singularity)比如在当前的姿态下,机器人的端点可以产生的速度是由两个速度合成的:v1和v2. v1是由于第一个旋转关节产生的;v2是由于第二个旋转关节产生的;图(a ) 图(b )可以看到图(a )中两个速度矢量v1和v2在平面上没有共线,它们是独立的、不共线的,我们是可以通过调整v1和v2的大小来得到任意的合速度的(大小和方向)。
工业机器人的奇异点工业机器人作为现代工业生产的重要工具之一,其高效、精准的操作能力以及强大的负载能力,给生产线的自动化带来了巨大的改变。
然而,在实际应用中,工业机器人也会面临一些特殊情况,即所谓的奇异点。
本文将对工业机器人的奇异点进行探讨,介绍奇异点的概念、产生的原因以及如何处理奇异点等内容。
一、奇异点的概念在工业机器人的运动学中,奇异点是指机器人在某个姿态下,由于其运动学特性而导致某些关节无法继续运动的状态。
奇异点的产生是由于机器人的自由度与工作空间的限制之间的矛盾所导致的,是机器人运动学复杂性的结果。
奇异点的存在会对机器人的运动稳定性和控制产生一定的挑战,因此,对奇异点的理解和处理至关重要。
二、奇异点的产生原因奇异点的产生主要与机器人的机械结构有关,具体表现在以下几个方面:1. 几何约束:机器人在进行运动时,由于其机械结构的约束,可能会导致某些关节无法继续运动,从而产生奇异点。
2. 姿态限制:机器人在特定姿态下,例如姿态靠近平面或者轴线,会导致机器人的运动学模型发生奇异点。
3. 空间限制:机器人的自由度与其工作空间的限制之间存在一定的矛盾。
当机器人的自由度过高时,可能会导致奇异点的产生。
三、处理为了解决工业机器人的奇异点问题,可以采取以下几种策略:1. 规避奇异点:通过合理规划机器人的轨迹或者姿态,避免机器人进入奇异点附近的区域。
这需要对机器人的运动学进行深入理解,以便能够合理规划路径,防止机器人进入奇异点。
2. 增加自由度:通过增加机器人的自由度,可以减少奇异点的出现概率。
例如,采用六轴机器人代替四轴机器人,可以增加机器人在工作空间的灵活性,减少奇异点的发生。
3. 强化控制算法:通过优化机器人的控制算法,提高机器人在奇异点附近的稳定性和精确性。
例如,采用模型预测控制(MPC)算法或者迭代学习控制算法,可以提高机器人在奇异点附近的控制性能。
4. 传感器辅助:利用传感器技术对奇异点进行实时监测和识别,及时发现奇异点的存在,并通过调整机器人的姿态或者路径,避免机器人进入奇异点。
产生的结果如下:
机械臂自由度减少,从而无法实现某些运动?
某些关节角速度趋向于无穷大,导致失控?
无法求逆运算?
当机器人以笛卡尔坐标系运动时,经过奇点,某些轴的速度会突然变得很快,TCP点的路径速度会显着减慢。
因此,应避免机器人的轨迹经过奇点附近。
如何产生奇异点(singularity)
说到奇异点的产生就不得不提一下的Gimbal Lock[2].
如下图,飞机内部的陀螺仪有三个旋转的自由度,假设三个圈会随着飞机的旋转而旋转,旋转的轴线如上图:
时,其中一个圈与原本水平的圈在这一瞬间发生了重合,从而减少角向上达到当其中pitch90°了一个自由
度。
.
当然,飞机的旋转并没有真的被LOCK了,依然可以运动。
相同的情况同样可以发生在机器人上:轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇6时。
肩部奇点发生在腕(6轴重合平行)4点。
腕部奇点发生在轴和321轴旋转中心线时。
肘部奇点发生在腕部中心和轴部中心位于轴一条线。
轴产生奇异点(wrist singularity)4轴和6(大部分机器人四轴和六[3]下图中的六轴机器人,四轴和六轴相交这玩意跟机器人轴都会相交,所以很多机器人都会存在这种奇异点,.的品牌无关,只和结构有关)
六三个轴便形成了上面提到的,机器人的五轴与四轴和六轴的轴线相交,因此,机器人四,五),四当五轴旋转到某个角度时,比如下面这个角度(所有的关节角度都是0°Gimbal Lock.
轴和六轴共线,奇异在此发生。
,当你打开机器人模型的时候,ABB因此,在某系机器人仿真软件里,比如说的robotstudio 机器人的五轴会是这样的:
耷拉着小脑袋真不是为了卖萌,而是为了避开奇异点。
除了这种奇异点,还有其他两种:
(Alignment singularity)轴奇异点轴和二、16
三、当机器人的2轴和3轴产生奇异点(Elbow singularity)
v2. 和比如在当前的姿态下,机器人的端点可以产生的速度是由两个速度合成的:v1; 是由于第一个旋转关节产生的v1;
是由于第二个旋转关节产生的v2
)b 图( a图()
在平面上没有共线,它们是独立的、不共v1a)中两个速度矢量和v2可以看到图(和v2的大小来得到任意的合速度的(大小和方向)。
线的,我们是可以通过调整v1v1b)这个姿态的时候:这个情况很直接,无论你怎样改变但是,当机器人处于图()方向相同的速度。
这就意味着你的机器人端点的大小,你都只能合成出和v2v1(v2和的速度不是任意的了,你只能产生某个方向上的速度。
这样机器人就奇异了。
在机器人控制上来说,就意味着,你一旦奇异了,你就不能随意控制你的机器人朝着你想要的方向前进了。
这也就是前面所谓的自由度退化、逆运动学无解。
解决办法:
1.在规划路径中尽可能的避免机器人经过奇异点。
2.结合机器人运动学,优化机器人反解算法,确保在奇异点附近伪逆解的稳定性。