基于超声波的汽车并线辅助系统设计
- 格式:pdf
- 大小:653.22 KB
- 文档页数:2
基于超声波的汽车防撞系统的设计目录1 绪论 (1)2 课题简介及其发展现状 (3)2.1 课题研究现状及其发展意义 (3)2.2 超声波简介 (4)3 总体设计方案 (5)3.1 设计总体思路概况 (5)3.2 超声波测距原理 (6)3.3 超声波传感器 (7)3.4 控制系统框图 (9)3.5 超声波发射装置设计 (9)3.6 超声波接收装置设计 (11)3.7 温度补偿 (13)3.8 显示电路设计 (14)3.9 报警装置设计 (17)4 软件设计 (18)4.1 软件工作流程 (18)4.2 主程序流程图 (19)4.3 超声波的发生子程序和中断程序 (20)5 硬件设计 (20)5.1 芯片的功能及其测距原理 (21)5.1.1 AT89C51的功能特点 (21)5.1.2 单片机实现测距的原理 (22)5.1.3 系统的特点 (22)5.2 超声波测距系统元器件清单 (23)结束语 (25)参考文献 (26)附录 (20)附录1 汽车防撞测距仪原理图 (24)附录2 程序清单 (25)1 绪论曾几何时,汽车对很多家庭来说是不敢想象的。
但随着社会生产力的发展和经济水平的大幅度提高,百姓的收入日益增加,解决了温饱问题的家庭开始奔向小康,表现最明显的是交通工具的升级换代:一些家庭开始购买汽车作为代步工具。
近几年我国汽车保有量逐年增加,2009年的保有量为6300万辆,2010年达到7400多万辆。
按保守估计,未来国内汽车保有量将达到4.9亿辆左右,即大约350辆/千人。
对于汽车数量的大副度攀升,尽管国家在公路设施上不断地改进,但道路上的车辆仍然还是越来越多,尤其在上下班时段完全避免不了汽车拥挤的现状。
再加上汽车设计中车速的不断提高,虽然公路上各路段都有限速,但撞车事件仍然在广大人民的生活中屡屡发生,给人们带来巨大的人身伤亡和社会财产损失。
针对汽车拥挤的现状,设计一种反应快,稳定性好而且经济实用的汽车防撞测距仪对当今汽车行驶安全现状势在必行。
摘要随着中国工业经济的不断高速发展,汽车行业成为了促进中国经济发展的不可或缺的一部分,近年来我国高速公路追尾碰撞事故频繁发生,而车载追尾碰撞预警系统在解决高速公路行车安全中具有良好的前景,科学技术的快速发展使得超声波技术在汽车领域中的应用越来越广泛。
本文对超声波汽车防撞系统进行了理论分析,利用模拟电子、数字电子、微机接口技术、超声波换能器、以及超声波在介质中的传播特性等知识,采用以stc89c51单片机为核心的低成本、高精度、微型化数字显示超声波测距的硬件电路和软件电路设计方法在此基础上设计了系统的总体方案,最后通过硬件个软件实现各个功能模块。
该设计由超声波发射模块、信号接收模块、单片机处理模块、数码显示以及声光告警显示模块等部分组成,文中详细介绍了测距器的硬件组成、检测原理、方法以及软件结构。
超声波发射模块中采用555定时器构成的时基电路,接收电路使用SONY公司的CX20106A红外检测专用芯片,该芯片常用于38kHz的检波电路,文中通过对芯片内部电路的仔细分析,设计出能够成功对40kHz超声波检波的硬件电路,并且增益可调,与传统超声波检波电路相比,电路变得精简,调试变得相对容易。
测距器使用数码管显示目标物的距离。
为了保证超声波汽车防撞系统的可靠性和稳定性,采取了相应的抗干扰措施。
就超声波的传播特性,超声波换能器的工作特性、超声波发射装置、接收装置、超声微弱信号放大、波形整形、速度变换电路及系统功能软件等做了详细说明.实现障碍物的测距、显示和报警,超声波测距范围0.6-2.0米,精度在10厘米左右。
关键词:汽车防撞报警系统、STC89C51、传感器、LED显示、测量距离AbstractWith the rapid development of China industrial economy, the automotive industry has become an indispensable part of China promote economic development in recent years, the rear end collision accidents occur frequently in China, and the vehicle rear end collision warning system in the settlement of expressway traffic safety has a good prospect, the rapid development of science and technology makes the ultrasonic technology applied in automotive more widely in the field of. This paper analyses the theory of ultrasonic wave automotive collision avoidance system, the use of analog electronics, digital electronics, computer interface technology, ultrasonic transducer, and the ultrasonic propagation in the medium of knowledge, using low cost, usingSTC89C51 microcontroller as the core of the hardware circuit and software design method of the circuit of high precision, miniaturization digital display ultrasonic ranging in on the basis of the overall system design, the hardware software implementation of each functional module.The design is composed of ultrasonic transmitting module, the signal receiving module, microcontroller module, digital display and sound and light alarm display module and other components, this paper introduces in detail the range of hardware devices, measuring principle, method and structure of software. The time base circuit module 555 timer used a special chip CX20106A, ultrasonic, infrared detection receiving circuit using the SONY company, the chip used in the detector circuit 38kHz, careful analysis of the internal circuit in this paper, the hardware circuit design can successfully 40kHz ultrasonic detection, and adjustable gain, compared with the traditional ultrasonic detection circuit, the circuit is simplified, the debugging easier. The range finder using digital tube display distance of object.In order to ensure that the ultrasonic wave automotive collision avoidance system reliability and stability, take the corresponding anti-interference measures. On the ultrasonic propagation characteristics, job characteristics, the ultrasonic transducerultrasonic transmitting device, receiving device, ultrasonic signal amplification and waveform shaping, speed converter circuit and system function of software in detail.The ranging, obstacle of display and alarm, ultrasonic distance measurement range of0.6-2.0 meters, the accuracy of about 10 cm.Keywords: anti-collision alarm system, STC89C51, sensor, LED display, measuring the distance of car目录摘要..................................................................................................错误!未定义书签。

基于超声波测距的汽车倒车防撞报警系统设计一、本文概述本文针对汽车安全驾驶领域的重要需求,详细探讨并设计了一种基于超声波测距技术的汽车倒车防撞报警系统。
随着城市交通环境复杂性的增加以及人们对行车安全意识的提高,如何有效防止因驾驶员视线盲区和操作失误引起的倒车碰撞事故成为研究热点。
本系统利用超声波传感器作为主要探测元件,通过发射和接收超声波信号来精确测量车辆与后方障碍物之间的实时距离,并结合智能算法分析处理这些数据,以便在车辆靠近障碍物到危险距离时及时发出报警提示,辅助驾驶员做出正确决策,从而显著提升倒车安全性。
文章首先阐述了该系统的背景意义和技术原理,随后深入剖析超声波测距方法及其在汽车应用中的优势和挑战接着,详细介绍了系统架构设计,包括硬件组成(如超声波传感器模块、信号处理电路、报警装置等)及软件算法实现通过实验验证了系统的性能指标,探讨其在不同工况下的稳定性和准确性,并对未来可能的优化方向进行了展望。
通过本文的研究,期望能为汽车主动安全技术的发展贡献一份力量,推动相关产品的实际应用与普及。
二、超声波测距原理及技术超声波测距技术是利用超声波在空气中的传播特性来实现距离测量的方法。
超声波是一种频率高于人耳能听到的上限(约20kHz)的声波,它在空气中的传播速度相对恒定,约为343米秒。
这一特性使得超声波非常适合用于精确的距离测量。
超声波测距的基本原理是发射器发射出一定频率的超声波,当这些波遇到障碍物时会发生反射,反射波被接收器接收。
通过测量超声波发射和接收之间的时间差,可以计算出超声波传播的距离。
由于超声波的传播速度是已知的,因此可以通过以下公式计算距离:这里的“时间差 2”是因为超声波需要从发射器传播到障碍物,再从障碍物反射回接收器,所以总时间是往返时间。
在汽车倒车防撞报警系统中,超声波传感器通常被安装在汽车的尾部。
当驾驶员开始倒车时,系统会自动激活传感器,传感器开始发射超声波。
超声波遇到车辆后方的障碍物时反射回来,被传感器接收。
开启泊车系统
搜索目标车位
否
泊车位大小
规划泊车轨迹
控制泊车轨迹
否
到达目标车位
结束泊车
关闭系统
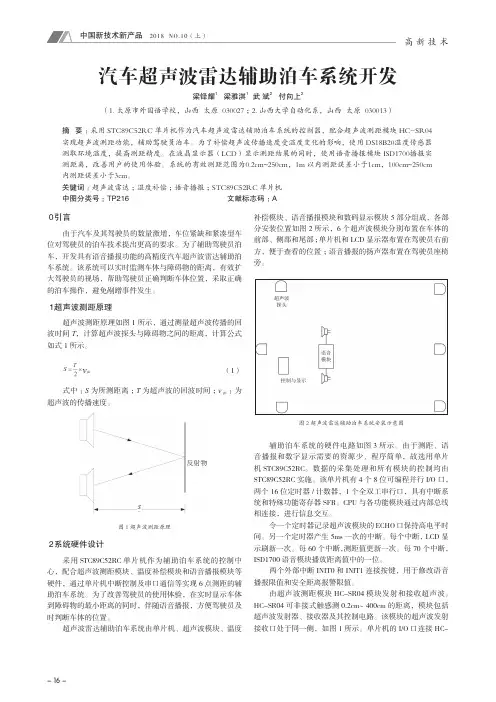
1全自动平行泊车系统流程
超声波探测理论分析
超声测距按照内部原理的不同,包括共振式和脉冲反射式两种。
车辆对其有特殊要求,因此一般都使用脉冲反也就是借助超声的反射特点进行探测。
其操作原理主要是借助超声波的传感器,对具体位置发射超声波,时开始自动计时操作,传播超声波,当超声波遇到障碍时会折返回给超声波接收器,接收器收到后会停止工作。
影响超声波的传播速度主要是环境的温度和湿度,
产生不同的测量结果。
路径规划
如果不把汽车后轮侧滑的情况考虑在内,
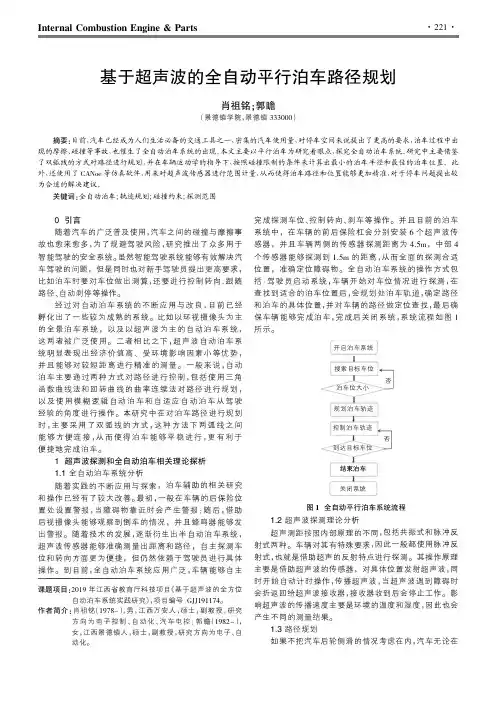
15
10
5
20151050510
5
10
15
图2探测范围
入位,并且还会有碰撞的危险。
一旦车辆和障碍物之间距离过小,低于安全距离而发生碰撞时,即便采用超声波探测,车辆也很难迅速做出反应,因此只能做出紧急制动,从而完成泊车过程。
为了解决这个问题,从而尽力保证不发生车辆碰撞的问题,全自动泊车系统会根据车辆和障碍物的情况做出判断,对路线进行安排,从而确保车辆完成停车入位。
在对自动平行路径进行规划时,也有静态和动态两种不同方式,笔者认为可以将二者相结合。
常规的泊车一般使用静态泊车路径,从而避免碰撞的情况出现,全自动泊车系统则按照具体情况,对碰撞的边界做出测量,并且划。
基于超声波汽车防撞系统终极版近年来,汽车人性化智能安全系统的研发得到了广泛的关注和应用,超声波汽车防撞系统作为其中的一个重要组成部分,在实际使用中得到了越来越广泛的应用和认可。
本文将详细介绍基于超声波汽车防撞系统的终极版,包括系统原理、设计方案、实现效果等内容。
一、系统原理超声波汽车防撞系统是利用超声波探头检测车辆距离,从而实现安全停车的智能化系统。
其原理就是利用超声波探头发出的超声波,在被检测的反射面后返回到探头,通过计算出发送和接收之间的时间差距,从而推算出距离。
二、设计方案超声波汽车防撞系统终极版的设计方案可以分为硬件设计和软件设计两个方面。
1. 硬件设计超声波探头是核心部件,也是系统的硬件基础。
在超声波探头方面,终极版的设计采用了四个探头,分别排布在车辆四个角落,每个探头均采用高精度的超声波传感器。
四个探头通过连接控制器,控制器采用微处理器并配置有LCD屏幕,可以实时地显示四个方向的距离信息。
2. 软件设计超声波汽车防撞系统的软件设计包括控制器程序和可视化界面程序两部分。
(1)控制器程序控制器程序是核心,实现了超声波探头的控制和计算以及声音告警等功能。
超声波波控制器程序采用C语言编写,主要包括以下几个模块:a. 初始化模块:超声波探头初化模块主要是对超声波探头进行初始化设置,包括使用的超声波传感器型号和探头数量等。
b. 超声波控制模块:超声波控制模块主要是实现超声波探头的控制,即通过控制超声波传感器向检测区域发出超声波,在反射面后将超声波接收,并计算出车辆距离等相关信息。
c. 距离计算模块:距离计算模块主要是用于计算车辆距离的具体算法,可以通过采用常规的时间乘以声速计算距离。
通过计算出的距离值,程序可以判断是否需要发出声音告警。
d. 声音告警模块:声音告警模块是超声波防撞系统最为重要的模块之一,其主要功能是通过超声波探头检测到距离过近时(一般默认安全距离为30cm)向驾驶员发出警告信号。
课程设计名称:智能仪器设计题目:基于超声波定位原理的停车辅助系统学期: 2014-2015学年第二学期专业:测控技术与仪器班级:测控12-2姓名:王治国学号: 1205070219指导教师:李雅梅智能仪器设计课程设计成绩评定表课程设计任务书一、设计题目基于超声波定位原理的停车辅助系统二、设计任务(1) 根据超声波测距原理,设计出系统的硬件电路图。
(2) 实现超声波的发送与接收,从而实现利用超声波方法测量物体间的距离。
(3) 以数字的形式显示测量距离。
(4) 在距离小于50cm时发出报警。
三、设计计划本设计共3周。
第1周:针对选题查资料,确定设计方案;第2周:方案分析比较,电路原理设计,进行元器件及参数选择;利用Altium Designer 进行电路图绘制第3周:编写主程序流程图和软件程序及编写整理设计报告。
四、设计要求1、绘制软件流程图并利用汇编语言编写软件程序;2、绘制系统硬件原理图;3、形成设计报告。
指导教师:李雅梅教研室主任:李雅梅2015年5月26 日摘要随着社会经济的发展和交通运输业的不断兴旺,汽车的数量在不断的增加。
交通拥挤状况也日益严重,撞车事件也经常发生,造成了很多不可避免的人声伤亡和经济损失,面对这种情况,设计一种响应快、可靠性高并且比较经济的汽车防撞预警系统显得非常的重要。
超声波测距法是一种最常见的距离测量方法。
本文介绍的就是利用超声波测距法设计一种倒车防撞报警系统。
本文的内容是基于超声波测距的倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89S51单片机结合于一体,设计出一种基于AT89S51单片机得倒车防撞系统。
本系统采用软硬结合的方法,具有模块化和多用化的特点。
论文概述了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。
对于系统的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统的总体构成。
通过多种发射接收电路设计方案比较,得出了最佳设计方案,并对系统各个设计单元的原理进行了介绍。
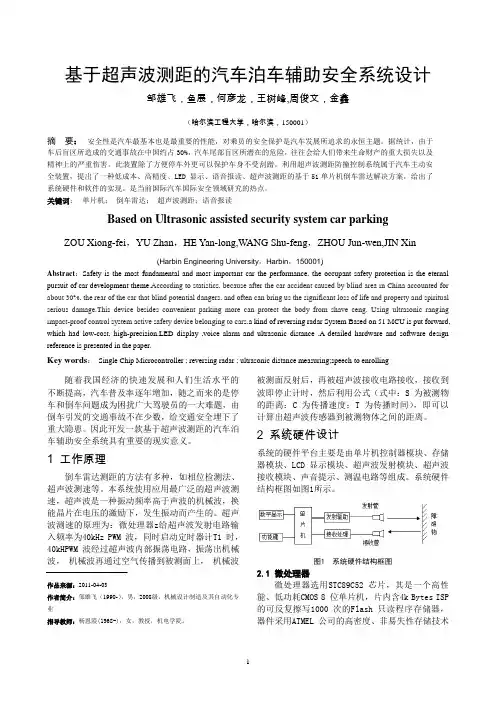
基于超声波测距的汽车泊车辅助安全系统设计邹雄飞,鱼展,何彦龙,王树峰,周俊文,金鑫(哈尔滨工程大学,哈尔滨,150001)摘要:安全性是汽车最基本也是最重要的性能,对乘员的安全保护是汽车发展所追求的永恒主题。
据统计,由于车后盲区所造成的交通事故在中国约占30%,汽车尾部盲区所潜在的危险,往往会给人们带来生命财产的重大损失以及精神上的严重伤害。
此装置除了方便停车外更可以保护车身不受刮蹭。
利用超声波测距防撞控制系统属于汽车主动安全装置,提出了一种低成本、高精度、LED 显示、语音报读、超声波测距的基于51单片机倒车雷达解决方案,给出了系统硬件和软件的实现。
是当前国际汽车国际安全领域研究的热点。
关键词:单片机;倒车雷达;超声波测距;语音报读Based on Ultrasonic assisted security system car parking ZOU Xiong-fei,YU Zhan,HE Yan-long,WANG Shu-feng,ZHOU Jun-wen,JIN Xin(Harbin Engineering University,Harbin,150001)Abstract:Safety is the most fundamental and most important car the performance, the occupant safety protection is the eternal pursuit of car development theme.According to statistics, because after the car accident caused by blind area in China accounted for about 30%, the rear of the car that blind potential dangers, and often can bring us the significant loss of life and property and spiritual serious damage.This device besides convenient parking more can protect the body from shave ceng. Using ultrasonic ranging impact-proof control system active safety device belonging to cars,a kind of reversing radar System Based on 51 MCU is put forward, which had low-cost, high-precision,LED display ,voice alarm and ultrasonic distance .A detailed hardware and software design reference is presented in the paper.Key words:Single Chip Microcontroller ; reversing radar ; ultrasonic distance measuring;speech to enrolling随着我国经济的快速发展和人们生活水平的不断提高,汽车普及率逐年增加,随之而来的是停车和倒车问题成为困扰广大驾驶员的一大难题,由倒车引发的交通事故不在少数,给交通安全埋下了重大隐患。
毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统硬件设计1选题的背景、意义随着我国汽车产业的发展和人民生活水平的不断提高,越来越多的家庭拥有自己的汽车,在享受汽车给我带来便利的同时,一方面汽车的数量逐年增加,公路,街道,停车场和车库拥挤不堪,可转动的空间越来越少,另一方面,新司机非专职司机越来越多,由于倒车而产生的问题也日益突出,倒车引起的纠纷也越来越多。
倒车时,车辆之间,车辆与人之间,车辆与墙壁等障碍物之间的碰撞时有发生,在2002年的车辆事故发生的比例中,倒车引起的事故占21%,到2006年,倒车引起的事故比例占28%,到2008年甚至达到了30%。
倒车已成为一项令人头痛的任务,即使是经验丰富的老司机也在抱怨倒车是一件费力费神的事。
汽车倒车时,由于驾驶员看不见后面的物体和人,往往会引发事故。
由于在视觉盲区,无法看清楚身后的障碍物,司机倒车时很容易刮伤汽车,甚至发生事故,当倒车进入停车场指定泊位时,如果撞到石块或桩基,常常会将车后的消音器,后车灯和后车箱撞坏。
倒车是一个复杂的任务。
他依赖于驾驶员的驾驶经验,驾驶技巧以及反应灵敏程度。
任一环节出现错误都会导致驾驶员无法快速准确的完成倒车任务。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性能提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,解决汽车倒车中存在的困难。
解决汽车的倒车难题目前有两种思路,一是寄希望于汽车自动驾驶技术及其配套设施的日益成熟,目前这项技术仍处于研制开发阶段,短期内尚未能开发应用,第二,据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可减少倒车事故的30%。
所以用简单的汽车倒车预警系统,亦能很大程度地解决倒车难题,但是传统的汽车倒车预警系统的功能简单,驾驶员仍然需要通过后视镜去判断车后的物体,以及通过估计汽车和车后障碍物的距离来完成倒车任务。
为了减少因此带来的损失,需要有一种专门的辅助装置帮助司机可以安全的完成倒车任务。
基于汽车盲点辅助预警系统的超声波测距模块软硬件设计季鑫;钟绍华;周利涛;胡军;毛冲冲【期刊名称】《湖北汽车工业学院学报》【年(卷),期】2015(029)004【摘要】基于超声波原理设计了汽车盲点辅助预警系统测距模块.应用Altium Designer软件设计了超声波传感器发射和接收电路,应用CodeWarrior平台中PE 工具设计测距模块的控制策略.实验结果表明:试验测得的超声波探头至障碍物的距离与用卷尺量得的实际距离相近,并且在减小探头与障碍物之间距离的过程中发射和接收信号的时间间隔随之减小,所设计的硬件和软件符合要求.【总页数】5页(P26-30)【作者】季鑫;钟绍华;周利涛;胡军;毛冲冲【作者单位】武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070;武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070;武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070;武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070;武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北武汉430070;武汉理工大学汽车零部件技术湖北省协同创新中心,湖北武汉430070【正文语种】中文【中图分类】U463.6【相关文献】1.基于DSP的超声波测距模块标准化SCI接口设计 [J], 张磊;董改花;贾利英;李海曹2.基于超声波测距技术的车辆防剐蹭预警系统的设计 [J], 郝玉楠;纪昕洋;马晴3.基于STM32和超声波测距的倒车雷达预警系统设计 [J], 韩韧;金永威;王强4.基于CAN总线的移动机器人超声波测距模块标准化设计 [J], 董改花;孙荣川;孙立宁;郭秀华5.汽车倒车系统中超声波测距模块的设计 [J], 彭翠云;赵广耀;戎海龙因版权原因,仅展示原文概要,查看原文内容请购买。
基于超声波传感器的侧视辅助系统设计龙琴【摘要】介绍基于超声波传感器的侧视辅助系统的设计,详细阐述侧视辅助系统的设计方案.【期刊名称】《汽车电器》【年(卷),期】2016(000)009【总页数】3页(P47-49)【关键词】超声波传感器;侧视辅助系统;盲区【作者】龙琴【作者单位】北京汽车研究总院有限公司电子电器与空调部,北京 101300【正文语种】中文【中图分类】U463.6汽车存在四大视觉盲区:前盲区(发动机盖前看不到的地方)、后盲区(车辆后面的盲区)、后视镜盲区(车两边的后视镜只能看到车身两侧,看不到车身左后方及右后方区域)和AB柱盲区(由于挡风玻璃两侧的A、B柱遮挡的视觉区域)。
由于后视镜盲区的存在,驾驶员在进行并线超车时,疏于过肩转头目测后视镜盲区内的车辆,容易造成剐蹭、追尾等交通事故。
侧视辅助系统可消除侧向视野盲区的影响,在变道时为驾驶员提供观察帮助,当危险临近时发出警报提示。
侧,后保险杠上的2个传感器用来侦测车道左右两侧盲区的情况,而前保险杠上两侧的传感器的主要作用是警报真实性核查,控制器用于判断是否需要报警及将报警信号提供给组合仪表和报警指示灯进行报警。
侧视辅助系统由侧视辅助控制器、4个侧视辅助传感器、外后视镜上的报警灯以及组合仪表组成(图1)。
侧视辅助传感器采用超声波传感器,用于发射和接收反射回波,分别位于车辆前后保险杠的左右两2.1 探测范围侧视辅助系统能够监测车辆侧后方的区域,当车速低于65km/h,探测区域大小为2.4m×2.4m;当车速大于65 km/h,探测区域大小为3m×3 m,其探测范围见图2所示。
2.2 报警要求为了描述侧视辅助系统报警要求,定义了与侧视辅助系统相关的区域位置,见图3。
依据ISO 17387 Intelligent transport systems——Lane change decision aid systems(LCDAS)——Performance requirements and test procedures对报警要求进行了定义,侧视辅助系统不能报警如图4所示,侧视辅助系统必须报警如图5所示,侧视辅助系统对于在该区域内的障碍物是否报警不做要求,如图6所示。