打瓜收获机捡拾装置的设计
- 格式:doc
- 大小:2.01 MB
- 文档页数:12
打瓜捡拾机构的设计摘 要:本课题需要重点研究的、 关键的问题是捡拾部件的设计,打瓜取籽机构在市场上有较 为成熟的机型,可以直接使用。
当打瓜成熟以后,瓜皮颜色明显变白转黄并变软,瓜蒂收缩 凹陷时采收, 打瓜瓜皮比西瓜的瓜皮有韧性, 有较强的碰撞能力。
且打瓜的生长环境较恶劣, 一般是杂草丛生,地形起伏不平,打瓜成熟以后其大小不同等,所以对捡拾部件有较高的要 求,必须要有地面仿形机构。
在设计捡拾部件时要充分考虑各种影响因素,保证收获机械的 正常运行。
关键词:打瓜;机械化;扎瓜齿0 引言农业机械化是农业现代化的重要内容,是先进的农艺技术和生物技术实施的载体。
农机 与农业分工所带来的要素优化组合, 经济规模以及农机经营者的经济目标与农业机械化的发 展目标一致的运行机制,为高效率和大规模的机械化农业生产提供了基本条件。
而机械化农 业相对于传统农业在改造恶劣的生产条件,高效能利用生态资源,吸收利用高新科技,抵御 自然灾害以及提高农业竞争能力和国际竞争力方面具有不可替代的优势。
在我国由农业大国 发展成农业强国的过程中,农业机械化是提高农业劳动生产率和农业竞争能力的核心要素。
新疆种植打瓜产量占全国种植打瓜总产量的 75%左右, 因此打瓜已成为我区主要的经济 作物之一,打瓜籽是重要的外贸商品,多年来在国际市场上供不应求。
主要销往西欧、北美、 中东、东南亚及港澳等地区,年出口量1~15 万吨,占世界贸易量的一半以上。
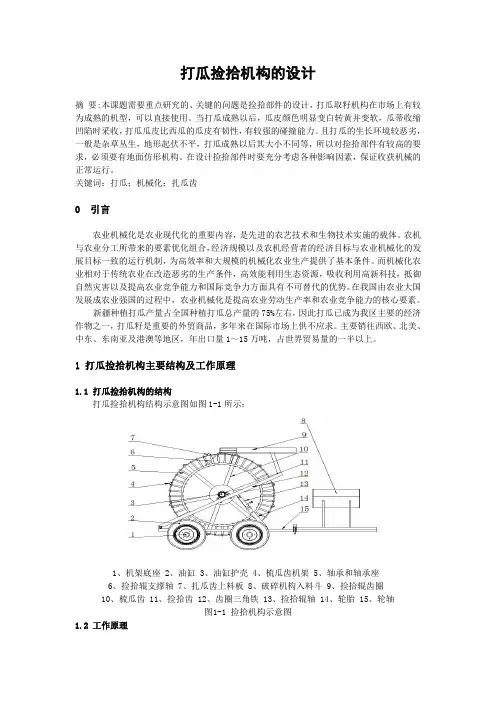
1 打瓜捡拾机构主要结构及工作原理1.1 打瓜捡拾机构的结构打瓜捡拾机构结构示意图如图1-1 所示:1、机架底座2、油缸3、油缸护壳4、梳瓜齿机架5、轴承和轴承座6、捡拾辊支撑轴7、扎瓜齿上料板8、破碎机构入料斗9、捡拾辊齿圈10、梳瓜齿 11、捡拾齿 12、齿圈三角铁 13、捡拾辊轴 14、轮胎 15、轮轴图1-1 捡拾机构示意图1.2 工作原理该捡拾机构在作业之前,由人工或集条机将籽瓜捡拾铺放成条,作业时使用小马力拖拉 机作为动力,通过机架带动捡拾辊向前滚动。
莲藕收割机打捞装置设计思路1.打捞器:打捞器是用于捞取莲藕的部件。
它由一个大型的铲斗组成,可以在水中将藕根挖起并装入切割器。
打捞器需要有足够的结构强度和稳定性,以确保在水中的稳定工作。
2.切割器:切割器是用于将莲藕切断的部件。
它由一个旋转刀具组成,可以将藕根自动切割成适当的长度。
切割器需要具备高速旋转、精准切割的能力,并且要保证切割过程中的安全性。
3.输送带:输送带是用于将捞起的莲藕输送到指定位置的部件。
它由一个带材和一个传动装置组成,可以将切割好的藕根顺利地输送到收集装置或指定位置。
输送带需要具备稳定的运行和可调速的功能,以适应不同工作环境的需求。
4.控制系统:控制系统是用于控制整个装置运行的部件。
它由传感器、执行器和控制器组成,可以实现对打捞器、切割器和输送带的自动控制。
控制系统需要具备精确的控制能力,可以根据设定的工作参数进行自动调整,并能够实时监测设备的运行状态。
在实际设计中,还需要考虑以下几个关键问题:1.工作效率:莲藕收割机打捞装置的主要目标是提高莲藕的采收效率。
因此,在设计过程中需要充分考虑每个部件的工作效率和协同性,以确保整个装置的高效率工作。
2.安全性:莲藕收割机打捞装置需要在水中进行工作,因此安全性是一个非常重要的考虑因素。
在设计过程中需要确保打捞器和切割器的安全性能,以避免工人在操作过程中受到伤害。
3.可靠性:莲藕收割机打捞装置需要长时间稳定地工作,在设计过程中需要选择高品质的部件和材料,并进行严格的工艺控制,以确保整个装置的可靠性。
4.可维护性:莲藕收割机打捞装置需要定期维护和保养,因此在设计过程中需要考虑到设备的便捷维护性,如易于清洁、易于更换损坏的部件等。
5.环保性:莲藕收割机打捞装置需要在水中工作,因此需要注意对水环境的保护。
在设计过程中要采用环保材料和技术,以减少对水环境的污染。
总之,莲藕收割机打捞装置的设计思路主要围绕着提高工作效率、确保安全性、保证可靠性、提高维护性和注重环保性等方面展开,以满足用户需求,并在实际工作中发挥最大的作用。
前言籽瓜是新疆生产建设兵团重要的经济作物,在建设兵团的农业产业结构调整中占有重要地位。
随着农业产业结构调整,籽瓜的种植规模越来越大,人力投入,生产成本的消耗等问题日益突出,因此,籽瓜产业的全程机械化亟需解决。
目前,在籽瓜的收获环节:采取人工采摘、人工辅助集条机集条集堆、机械取籽配合作业,使得劳动强度大,劳动成本高。
同时籽瓜成熟后因其特性不宜在田间放置过久,如逢秋雨霜冻,极易腐烂,另外籽瓜成熟时正是棉花、玉米、甜菜等大宗作物收获农忙之际,劳动力奇缺,给籽瓜人工收获带来很大困难因此,有必要对籽瓜收获取籽环节机具及配套设备进行研究以解决籽瓜机械化收获问题。
分析了目前在兵团广泛使用的几种籽瓜收获机械的基本结构及功能;并依据不同的工作机理,介绍了籽瓜捡拾装置、输送装置、取籽装置的基本类型和技术特点。
针对我国西部籽瓜加工劳动强度大、机械化程度低的现状,设计了籽瓜籽汁分离机。
该分离机的设计思路为:将籽瓜初步粉碎、用辊轮将籽瓜完全压碎、使瓜瓤和瓜皮分离、排出瓜皮、用离心法将汁和瓜籽分离、最后收集瓜籽。
本机的主要装置有破碎齿压碎辊轮、大滚筒棍刀、小滚筒、小滚筒辊刀和瓜籽的收集装置。
本机结构简单紧凑,装载携带方便,能够大幅提高籽瓜的加工效率,适合于广大籽瓜种植农户推广使用。
关键词:籽瓜:破碎:压碎:脱籽目录1绪论 (2)1.1研究的意义 (1)1.2研究目的 (1)1.3可行性分析 (1)1.4国内外打瓜破皮取籽机现状及分析 (1)1.5本课题需要重点研究的关键的问题及解决的思路 (2)2基本结构、原理及主要技术参数 (2)2.1打瓜破皮取籽机结构 (2)2.2打瓜破皮取籽机工作原理 (4)2.3主要技术参数 (4)3主要部件的设计 (5)3.1进料口作用 (5)3.2打瓜弹性的计算 (5)3.3破碎装置 (5)3.4籽瓜压碎装置 (7)3.5瓜皮分离装置 (8)4 籽皮分离装置中心轴的校核 (8)4.1轴直径的选择 (9)4.2轴校核 (9)4.3轴的扭转应力的校核 (10)4.4传动轴健侧挤压应力的校核 (10)5结论 (10)小结 (11)致谢 (12)参考文献 (13)1绪论1.1研究的意义打瓜是新疆生产建设兵团(以下简称兵团)的重要经济作物,在兵团的农业产业结构调整中占有重要的地位。
农业装备与车辆工程2015年0引言籽瓜属西瓜分支品种,是“籽用西瓜”的简称。
相对于常见的食用类西瓜,籽瓜的种植主要是用于获取瓜籽。
籽瓜瓜形与西瓜相似,但比西瓜小,单瓜平均质量1~3kg ,表面光滑,色浅绿,套有深绿色条纹。
世界上籽瓜的主要产区是中国,其次是泰国。
籽瓜盛产于我国西北地区,其中新疆、甘肃、内蒙古、宁夏、青海五省区为主产区。
籽瓜对耕种土壤要求不高、乱秧种植在旱沙地里、耐旱、投入成本低、经济效益高,成为农民增收的主要经济作物之一,在农业产业结构中占有重要地位。
目前,在籽瓜生产过程中的耕地、整地、播种、中耕、植保和取籽等机械化过程逐渐解决,但籽瓜生产过程中收获环节主要靠人工捡拾、集条集堆、人工喂入、机械脱粒,用工量大、劳动强度高、效率低、损失大。
而且籽瓜成熟时不宜田间放置过久,容易腐烂,籽瓜成熟期正是玉米等主要农作物收获的农忙时期,劳动力紧缺,给收获作物带来很大困难[1-2]。
1籽瓜捡拾的现状分析新疆是我国主要的籽瓜生产基地之一。
2008年全新疆籽瓜种植面积达20~23.3万hm 2。
2007年至2008年,新疆农科院农机化所和塔城地区农机推广站立项研制开发籽瓜捡拾脱粒机联合作业机和其它配套新技术作业,并后续进行了改进设计和更新设备,但均按新疆特殊地区制定的大规模标准化作业而进行研究、推广和实用。
该机适合膜下滴灌种植的无沟无垄的平整地块作业[3-5]。
内蒙古自治区籽瓜种植主要分布在巴盟、赤基金项目:内蒙古农业大学机电工程学院师生创新项目(1jdkx01)收稿日期:2014-12-02修回日期:2014-12-17doi :10.3969/j.issn.1673-3142.2015.03.010小型籽瓜捡拾装置的设计图雅,乌云塔娜,杜文亮,孙芊芊(010018内蒙古自治区呼和浩特市内蒙古农业大学机电工程学院)[摘要]内蒙地区籽瓜种植为家庭式小面积种植模式,种植面积不大,地块分散。
籽瓜收获环节中捡拾工作全部人工完成,劳动强度很大,劳动力紧缺。
前言籽瓜是新疆生产建设兵团重要的经济作物,在建设兵团的农业产业结构调整中占有重要地位。
随着农业产业结构调整,籽瓜的种植规模越来越大,人力投入,生产成本的消耗等问题日益突出,因此,籽瓜产业的全程机械化亟需解决。
目前,在籽瓜的收获环节:采取人工采摘、人工辅助集条机集条集堆、机械取籽配合作业,使得劳动强度大,劳动成本高。
同时籽瓜成熟后因其特性不宜在田间放置过久,如逢秋雨霜冻,极易腐烂,另外籽瓜成熟时正是棉花、玉米、甜菜等大宗作物收获农忙之际,劳动力奇缺,给籽瓜人工收获带来很大困难因此,有必要对籽瓜收获取籽环节机具及配套设备进行研究以解决籽瓜机械化收获问题。
分析了目前在兵团广泛使用的几种籽瓜收获机械的基本结构及功能;并依据不同的工作机理,介绍了籽瓜捡拾装置、输送装置、取籽装置的基本类型和技术特点。
针对我国西部籽瓜加工劳动强度大、机械化程度低的现状,设计了籽瓜籽汁分离机。
该分离机的设计思路为:将籽瓜初步粉碎、用辊轮将籽瓜完全压碎、使瓜瓤和瓜皮分离、排出瓜皮、用离心法将汁和瓜籽分离、最后收集瓜籽。
本机的主要装置有破碎齿压碎辊轮、大滚筒棍刀、小滚筒、小滚筒辊刀和瓜籽的收集装置。
本机结构简单紧凑,装载携带方便,能够大幅提高籽瓜的加工效率,适合于广大籽瓜种植农户推广使用。
关键词:籽瓜:破碎:压碎:脱籽目录1绪论 (2)1.1研究的意义 (1)1.2研究目的 (1)1.3可行性分析 (1)1.4国内外打瓜破皮取籽机现状及分析 (1)1.5本课题需要重点研究的关键的问题及解决的思路 (2)2基本结构、原理及主要技术参数 (2)2.1打瓜破皮取籽机结构 (2)2.2打瓜破皮取籽机工作原理 (4)2.3主要技术参数 (4)3主要部件的设计 (5)3.1进料口作用 (5)3.2打瓜弹性的计算 (5)3.3破碎装置 (5)3.4籽瓜压碎装置 (7)3.5瓜皮分离装置 (8)4 籽皮分离装置中心轴的校核 (8)4.1轴直径的选择 (9)4.2轴校核 (9)4.3轴的扭转应力的校核 (10)4.4传动轴健侧挤压应力的校核 (10)5结论 (10)小结 (11)致谢 (12)参考文献 (13)1绪论1.1研究的意义打瓜是新疆生产建设兵团(以下简称兵团)的重要经济作物,在兵团的农业产业结构调整中占有重要的地位。
打瓜收获集条机的设计与研究打瓜收获集条机是一种用于收获西瓜的农业机械设备。
在传统的农业生产中,西瓜的收获通常需要人工进行,耗时耗力且效率低下。
而打瓜收获集条机的出现,能够大幅度提高西瓜的收获效率,降低劳动强度,提高农业生产效益。
本文将对打瓜收获集条机的设计与研究进行探讨。
首先,打瓜收获集条机的设计需要考虑以下几个方面。
一是设备结构设计。
打瓜收获集条机主要由车架、传动系统、收瓜部分、控制系统等组成。
车架需要具备足够的稳定性和承载能力,保证机器在作业过程中不会发生倾覆或破损。
传动系统需要具备足够的动力和转速,保证机器能够顺利地进行收瓜作业。
收瓜部分需要考虑到瓜果的形状和大小,设计合适的机构使得瓜果能够被准确地捕捉和收集。
控制系统需要方便操作和调整,使得机器的运行更加灵活高效。
二是材料选择和加工工艺。
打瓜收获集条机需要具备足够的强度和耐用性,因此在材料选择上需要选用高强度、耐磨损的材料,如高强度钢材和工程塑料等。
同时,在加工工艺上需要考虑到机器的复杂结构和高精度要求,采用先进的加工设备和工艺流程,保证机器的质量和性能。
三是安全性和可维修性设计。
打瓜收获集条机在作业过程中需要面对复杂的农田环境,因此需要考虑到安全性设计。
避免机器意外倾覆、松动等情况发生,保证作业人员的安全。
同时,机器的可维修性也是一个重要的设计考虑因素,使得机器在故障发生时能够方便地进行维修和更换零部件。
其次,打瓜收获集条机的研究也是一个关键的方向。
一是收瓜机构的研究。
收瓜机构是打瓜收获集条机的关键部分,直接影响到机器的收瓜效果和作业效率。
因此,如何设计一个合理的收瓜机构,使得机器能够准确地捕捉到不同形状和大小的瓜果,并进行高效的收集,是一个需要深入研究的问题。
二是收瓜运动学的研究。
收瓜运动学是指瓜果在机器作业过程中的运动规律和轨迹。
通过对收瓜运动学的研究,可以优化机器的收瓜效果和作业效率。
例如,通过改变收瓜机构的位置和运动轨迹,可以提高机器的收瓜率和收瓜速度。
优秀本科毕业设计(论文)甘肃农业大学学生科研训练计划(S R T P)项目结题报告书项目名称:籽瓜捡拾打瓜机的设计主持人:所在学院:工学院专业年级:2010级农业机械化及其自动化指导教师:职称教授起止年月:2012年12 月至2013年12 月填写日期:二○一三年十一月二十六日学生科研训练计划(SRTP)项目管理办公室二ОО六年六月填表说明一、填写结题报告书前,请先征求指导教师意见。
报告书的各项内容要求实事求是,逐条认真填写。
表达明确、严谨,一律要求用打印稿件。
二、报告书为A4开本,于左侧装订成册。
一式三份,由指导教师和所在学院审查并签署意见后,统一报送学生科研训练计划(SRTP)项目管理办公室。
三、要求在本报告书后,必须附带经指导教师审阅、签字的详细研究资料与结果(论文、实验报告等)材料。
四、如表格不够,可以另加附页。
项目名称主持姓名籽瓜捡拾打瓜机学号项目编号电话20130739人指导教师实际参加研究经费研究期限专业年级姓名电话姓名姓名姓名总经费800元计划完成年月实际完成年月10农机校拨经费800元E-mail从事专业E-mail专业年级专业年级专业年级自筹经费2013-122013-12@10农机10农机10农机实际支出经费810元计划完成情况1.提前完成√2 .按期完成 3.延期完成 4.终止未按期完成的原因:研究成果形式实验设计实验报告调查报告套个个发表论文制作课件会议交流篇本次项目成果名称籽瓜捡拾打瓜机,三维模型图。
人员研究工作总结简介请按照下列提纲编写,要求简明扼要,以学术总结为主,总字数在1500字以内。
1.主要研究内容与方法、研究结果。
1.1研究内容(1)籽瓜捡拾打瓜机参数设计:根据籽瓜打瓜技术的农艺要求,针对捡拾、打瓜等问题,设计籽瓜捡拾打瓜机,使得捡拾彻底;根据籽瓜之间的距离计算出滚轮的直径、捡拾爪的数量,根据所得参数设计符合农艺要求的打瓜机构及行走轮尺寸。
(2)三维实体建模及装配:依据第一步确定的参数,在Pro/E实体设计环境中建立三维实体模型,并进行整机的组合装配。
莲藕收割机打捞装置设计思路莲藕是一种常见的水生植物,具有丰富的营养价值和药用价值。
在莲藕种植过程中,收割是一个非常重要的环节。
为了提高莲藕的收割效率和质量,设计一种莲藕收割机打捞装置是非常必要的。
莲藕收割机打捞装置的设计思路主要包括以下几个方面:1. 设备结构设计:莲藕生长在水中,因此莲藕收割机打捞装置需要具备在水中操作的能力。
设备结构应该合理,具有足够的稳定性和可靠性。
可以采用船体结构,配备稳定的浮力装置,保证设备在水中平稳运行。
2. 收割刀具设计:莲藕生长在水底泥沙中,收割刀具需要具备一定的穿透力和切割能力。
可以采用锋利的刀片设计,以提高收割效率。
同时,刀片的材质也需要考虑到莲藕的特性,避免对莲藕造成损害。
3. 传动系统设计:莲藕收割机打捞装置需要具备一定的移动能力,以便在水中进行收割作业。
传动系统设计应该考虑到设备的移动速度和操作灵活性。
可以采用液压传动系统,通过液压驱动设备行进和切割操作。
4. 控制系统设计:莲藕收割机打捞装置需要具备一定的自动化控制功能,以便实现对设备的精确控制和操作。
控制系统可以采用电气控制系统,通过电子设备实现对设备的控制和监测。
莲藕收割机打捞装置的工作流程如下:将莲藕收割机打捞装置放入水中,并启动传动系统,使设备开始在水中移动。
同时,刀具也开始旋转,准备进行收割作业。
然后,当设备接近莲藕时,刀具开始切割莲藕的根部。
切割刀具通过液压驱动,具备一定的穿透力和切割能力,可以快速切割莲藕的根部,并将其分离出来。
接着,当莲藕被切割分离后,收割机打捞装置的浮力装置会将莲藕浮起,方便后续的收集和处理。
当设备完成一定区域的收割作业后,可以通过控制系统将莲藕收割机打捞装置移动到下一个收割区域,继续进行后续的收割作业。
莲藕收割机打捞装置的设计思路主要是为了提高莲藕的收割效率和质量。
通过合理的设备结构设计、锋利的收割刀具设计、稳定的传动系统设计和精确的控制系统设计,可以实现对莲藕的高效收割和打捞。
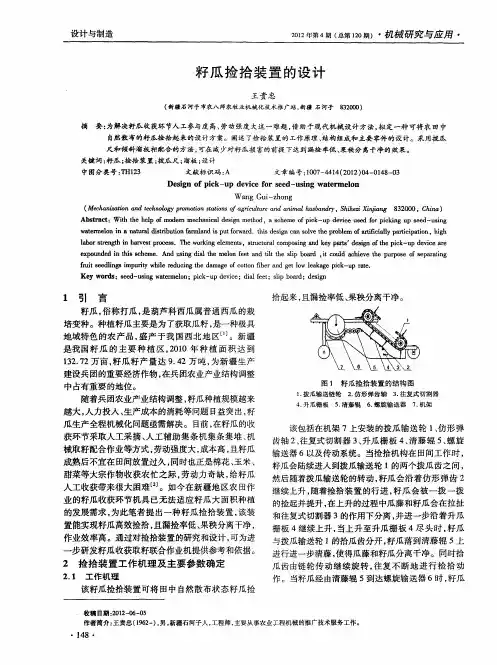
果实捡拾机作者:暂无来源:《发明与创新·中学生》 2017年第9期尽管现代农业的机械化水平越来越高,但果实收集特别是大枣、核桃等干果的收集仍采用单人持杆将果实击落,然后聚拢成堆,最后多人分拣装袋的作业方式。
该方式耗时费力,不仅影响了农户的经济收入,也让工人在工作时觉得枯燥无味、特别劳累。
能不能让果实收集也采用机械化操作?由此我联想到清扫路面的吹风机,如果将吹风机的进风口封闭,然后用管子连接,不就可以“吸取”果实了吗?一、原理设计原理图如图1。
起动吹风机,气流从果实捡拾管末端流入,带动果实以及掺混在果实内的砂石、杂草和树叶等一同进入一级分离室。
在一级分离室中,较轻的杂草、树叶等越过隔离罩进入吹风机内部,随高速旋转的气流排出吹风机。
较重的果实、砂石等落入二级分离室,实现一级分离。
进入二级分离室中的果实、砂石等刚好落在筛网上,在重力的作用下,直径较小的砂石穿过筛网的网眼进入杂物分离仓,直径较大的果实沿筛网滑入果实分离仓,实现果实和杂物的二级分离。
果实分离仓和杂物分离仓的仓门可定期打开,以收集装满的果实及清理砂石。
为保证使用效果,经过反复试验,我认为有如下两点需要特别注意。
1.保证一级分离室和二级分离室的密封效果,减少空气泄露,否则会降低捡拾果实的效果,甚至不能捡拾果实。
为此我在二级分离室的果实分离仓、杂物分离仓的仓门上增加了橡胶密封条,确保仓门的密封性。
将果实捡拾管和一级分离室用卡箍扎紧,避免移动果实捡拾管作业时造成松动漏气。
2.隔离罩过高则杂草和树叶难以越过,无法实现分离;过低则较轻的果实易越过隔离罩,进入吹风机蜗壳,随气流排出吹风机。
根据捡拾大枣的经验,建议隔离罩遮住进风口2/3的位置为最佳。
二、改进完善通过试验,以上装置能实现果实的收获,省工省时,但运行一段时间后需要及时清理吹风机内的杂草和树叶等,否则易堵塞吹风机,降低果实捡拾效果,甚至不能捡拾。
为解决这个问题,我在吹风机叶片上增加刀片,刀片随吹风机叶片一起旋转,能及时打碎吸入的杂草和树叶等。
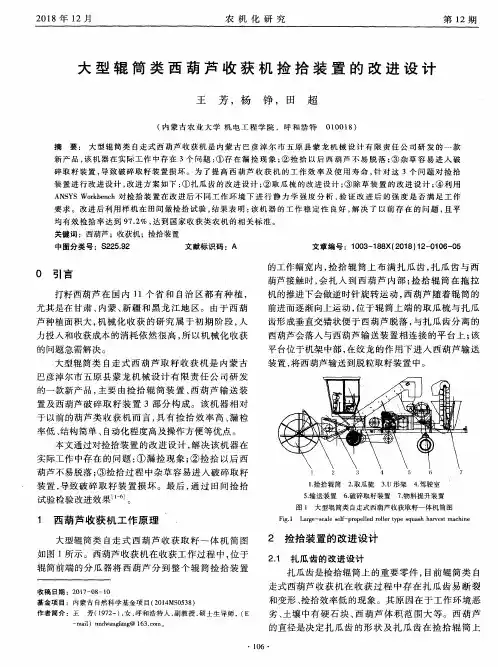
目录摘要 (2)前言 (3)1打瓜收获装置总体设计 (3)1.1设计方案 (3)1.2该方案的优缺点 (3)1.3总体配置 (4)1.3.1集条机的作业幅宽和集条圆盘数设计 (4)1.3.2集条梁架、捡拾轮高度设计 (4)1.3.3集条圆盘、捡拾轮的配置 (4)2主要工作部件的设计 (5)2.1集条支架的设计 (5)2.2四杆机构、捡拾轮油压的设 (6)2.3限位低轮装置的设计 (8)2.3.1限位地轮的设计 (8)2.3.2限位地轮机构的设计 (8)2.3.3集条圆盘装置仿形原理 (9)4强度校核 (9)4.1旋转轴的强度校核 (9)4.2集条支架的强度校核 (9)5捡拾机构的安装与调整 (10)5.1捡拾机构的正确安装 (10)设计总结 (11)谢辞 (12)参考文献 (13)附录 (14)打瓜收获机械捡拾装置的设计摘要:打瓜收获机是一种新型的机引收获作业机具,它的主要功能是捡拾和脱粒;它采用往复梭式作业,本设计始终将打瓜集抡在两侧,然后有捡拾轮捡拾并输送到脱粒机构中脱粒,直接实现由瓜到籽的一次性彻底收获。
工作时要求地表相对平整。
由于采用双捡拾轮和集条机同时运作,相对以往的收获机械减少了空行程,节省两倍行程,极大地提高了工作效率。
具有节油、省时等优点;本设计就是结合传统的打瓜收获机械,对其进行分析和设计。
关键词:打瓜;集条机;捡拾轮DaGua harvest machinery pick-up devicedesignAuthor:Xu YanlongAbstract: DaGua harvest machine is a kind of new JiYin harvest operation equipm- ents, its main function is to collect and threshing; It USES reciprocating spindle type homework, this design and always will DaGua set lun in bilateral, then a pick-up and piped to the threshing wheel versus institution by melons, direct implementation thr-eshing disposable thoroughly harvest to seed. Work surface relative level requirement when. Due to the double pick-up wheel and set the machine and operation, than in pre-vious harvest machinery reduced spare travel, save two times trip, greatly enhances the working efficiency. Has the advantages such as sparingly, time-saving; This desi -gn is combining the traditional DaGua harvest machinery, carries on the analysis and design.Keywords:DaGua; Set the machine; Pick-up round前言打瓜是西瓜中的一种类型,但主要是取其籽食之,味香而美,营养价值高。
随着农业产业结构的调整,打瓜的种植规模越来越大,人力投入,生产成本的消耗等问题日益突出。
为了提升打瓜的经济效益,给打瓜人工收获带来了很大困难,打瓜联合收获机械的研制与推广可提高新疆特色作物的机械化作业水平,减轻农民的劳动强度和负担,随着社会主义市场经济体制的完善,国民经济的持续增长,农业经济的全面发展,农民收入的不断增加,将为农业机械化事业的发展提供更加有利的机遇,开辟更加广阔,更加光明的前景。
1.打瓜收获装置总体设计1.1设计方案1)设计的打瓜收获机械由动力机械相联接而成为悬挂牵引机组,由该动力机械带动打瓜收获机进行收获。
2)捡拾轮集条机工作切换采用液压升降机构动力进行翻转升、升降。
3)集条机和捡拾脱粒机构同时工作提高工作效率。
1.2该方案的优缺点1)对拖拉机驱动轮的增重较大,有利于拖拉机功率的充分发挥。
2)由于采用双捡拾轮和集条机同时运作,相对以往的收获机械减少了空行程,节省两倍行程,使生产率大为提高。
具有节油,省时等优点。
3)增大了捡拾机构的金属用量,捡拾轮的重量比以往的捡拾机械重30-35%,捡拾轮在运输状态下,集条机和捡拾轮纵向长度总和过大,因此捡拾轮越重或重心越靠后,拖拉机的纵向稳定性和操作性越差。
这样一来,就限制了捡拾轮的结构长度不能过大,集条圆盘数不能过多。
机动性降低了,机组转弯半径远大于拖拉机的转弯半径,增大了转弯时间(尤期是在小块田地)工作控制不太灵活。
总体来讲,该方案满足工作机的性能要求,适应工作条件、工作可靠,成本低效率高。
1.3总体配置选择配套拖拉机的配套动力为13~26 kW,根据作业的特点可知,本机属于收获机械,其作业速度为0.6~1hm2/h,工作幅宽160~200 cm,工作速度4~8图1 集条机km/h,集条率≥90%。
作业时由小四轮前悬挂向前推进,集条机两侧各9片圆盘滚动推移打瓜成条。
前趟作业幅宽2000mm,返回作业对前一趟集成条的打瓜往回推移20 cm,使打瓜离开瓜秧和杂草,以便捡拾脱粒机进行后道作业。
因此,作业集条机幅宽为2000mm、因此工作总幅宽为最大为2000mm、集条机侧梁为2400 mm。
1.3.1集条机的作业幅宽和集条圆盘数设计总收获机械根据拖拉机的有效牵引力P来确定。
作业幅宽2000mm,分瓜器的角度为50°,计算可得侧梁为2400mm,集条圆盘定位间距设计为250mm,集条圆盘的直径为400mm,计算可得每个侧梁可安装9个集条圆盘。
如图1所示1.3.2集条梁架、捡拾轮高度设计主梁支架下表面至地表平面的空间高度。
为了保证集条圆盘在地面顺利翻转,不产生拥土堵草现象。
计算限位地轮和机架集条圆盘的配合高度,限位地轮装配后距地面高度可调为33-40cm,集条圆盘装配后不仿形时高度为45cm。
捡拾轮和机架装配后瓜钉刚好和地面接触。
1.3.3集条圆盘、捡拾轮的配置集条圆盘是打瓜集条机的主要工作部件。
如图2所示,它的作用是将瓜拨到两边并切断瓜藤。
集条机由集条圆盘、限位地轮、支架、分瓜器、四杠连杆机构、配重铁等组成。
集条圆因为要根据地面的起伏进行仿形拨瓜,因此将其分为长杆和短杆集条圆盘两部分,以便灵活运转更替拨瓜。
长杆和短杆之间有仿形弹簧连接使其不干涉运转并仿形,可以提高拨瓜性能。
在前部主梁上安装配重铁防止扎头现象使分瓜器可以充分分瓜。
捡拾轮要充分考虑在和集条机配合捡拾过程,中工作的捡拾宽幅,不工作的捡拾轮要能灵活,不干涉的用油压伸起来。
本次设计中,在试修法基础上对其进行测绘,以获得集条机、捡拾轮中各个零件的尺寸进行设计。
如图2所示图2 集条圆盘2主要工作部件的设计2.1集条支架的设计集条支架的作用是连接各零部件并传递牵引力。
集条支架主要有侧梁和主梁组成。
侧梁的主要作用是安装集条圆盘通过螺栓将其连接,主梁的作用主要是安装限位地轮和四杆连杆机构,有螺栓组合式和管材焊接式两种。
螺栓组合式支架通过螺栓连接,将热轧型钢纵梁、横梁组合在一起。
纵梁与集条圆盘的前进方向平行,用来固定分瓜器和配重铁。
为了加强支架的刚度,在支架架上还装有加强梁,这种支架拆卸较方便,但比较笨重。
管材焊接平面支架有三角形、梯形等,用矩形或圆形钢管焊接而成。
集条圆盘安装在侧梁上。
结构简单,强度较好。
但支架焊接技术要求高,变形修复困难。
设计中都采用16Mn无缝管材焊接平面支架三角形,在支架上装有加强梁,用方形钢管焊接而成主梁与斜梁相互成一定角度,图3 支架在斜梁上可以布置不同间距的集条圆盘,工作高度不合适时, 可适当调节限位低轮安装高度。
在工作切换中捡拾轮可以绕着轴销做翻转的运动。
集条圆盘液压旋转轴焊接于牵引架连接梁上,捡拾轮的液压座用螺栓固定在后捡拾脱离机架上以提供液压装置提供动力时,液压装置也能同时翻转。
如图3所示2.2四杆机构、捡拾轮油压的设计90度翻转式机力捡拾轮的换向机构型式采用液压式。
90度翻转式捡拾轮的液压式换向机构,是利用柱塞油缸的推力或拉力来完成90度翻转。
换向时,扳动油路控制阀,高压油进入油缸使活塞杆距离增大,于是与液压座连接的捡拾轮杆末端就绕销轴轴向上转动。
当梁架转至接近90°位置,液压旋转轴到达活塞杆升至最长时。
由于活塞杆的销孔与捡拾轮撑架上的液压旋转轴之间预先留有间隙死点,这时活塞处于预先固定垂直锁定状态。
也可利用其油压收缩后降低撑架高度,靠其自身的重力和地面的支持力翻转到位进行捡拾工作。
下次换向时,再按上述过程反动一次。
图4所示图4 捡拾轮如图5所示,为集条圆盘的四杆连杆机构,用轴销在拖拉机的前引架定位,当集条圆盘不工作只进行无负荷行走时,即可将液压升起,使集条圆盘脱离地面。
当需要工作时油压缩回降低支架高度,使集条圆盘和限位地轮同时处于合理的配合工作状态。
以保证集条圆盘可以充分切断瓜藤并把瓜拨向两边。
图6 限位地轮2.3限位低轮装置的设计2.3.1限位地轮的设计在采用支架高度调节上,常用限位地轮来控制,钢制限位地轮其轮辐有开式和闭式两种,分别适用于沙质和黏质土壤。
开式是由钢圈和中置辅板构成;闭式用钢板制成密封的空腔轮。
如图六所示,限位地轮为一独立部件,其安装在支架纵梁和横梁上,位置可上下调动。
轮子在梁上能垂直升降,调节配合集条圆盘的工作高度。
螺杆套管式限位地轮密封性好,操作比较省力,但结构比较复杂。
本设计限位地轮是开式的由钢圈和中置辅板构成。
设计如图6所示。
2.3.2限位地轮机构的设计采用限位地轮来调节距地表的高度,就必须有能使限位地轮高度发生变化的机构,因此,本设计采用螺栓孔的高度调节方式,调整螺栓的定位来间接达到图7 限位地轮支撑杆调节限位地轮高度的功能,具体机构如图7所示:调节限位地轮轮与支架之间的相对高度。
2.3.3集条圆盘装置仿形原理集条圆盘装置仿形调节的原理如图8所示:集条圆盘是用螺栓将其固定在侧梁上,因其长短集条圆盘一些间隙安装仿形弹簧,因此可随阻力和高度方向自由调节转动,当转动如图时,随着牵引力的牵引,集条圆盘的仿形弹簧处会随地形调节,此时集条圆盘的高度即被控制,随地面仿形,伸长或是缩短仿形弹簧长短。
4.强度校核4.1轴的强度校核轴采用45号钢,在工作时,承受最多的是轴向方向的拉力,因此产生的是轴向方向的拉伸变形 已知45号钢抗拉强度极限σ为590a MP 轴直径r=24mm 因此,在轴横截面上的应力为 N F F A A σ== ,已知作用在轴上的拉力F=26800N 带入上式,a 22680014.82MP 3.14*24σ==<B σ 因此可知轴的强度足够图8 集条圆盘仿形结构4.2集条支架的强度校核:支架采用的长60mm 宽30mm 的矩形45号钢,在工作时受到来自土壤对其的横向剪切力,因此对其剪切应力进行校核,已知45号钢剪切疲劳极限,1τ-为140a MP因此,在其横截面上的剪切应力应为S F Aτ=,已知作用在支架上的最大力 26800/4=6700N 带入上式,S F A τ==670060*30=3.7a MP <1τ- ,因此可知支架的强度足够。