四旋翼飞行器无线遥控技术
- 格式:ppt
- 大小:729.50 KB
- 文档页数:60


四旋翼飞行器飞行控制技术综述四旋翼飞行器是一种具有四个独立旋翼的飞行器,也被称为四轴飞行器。
它采用借助电子设备来保持平衡和方向飞行,是一种近年来非常流行的飞行器类型。
四旋翼飞行器飞行控制技术是指通过控制器、传感器和电动机等设备来实现飞行器的稳定飞行和精确控制。
本文将对四旋翼飞行器的飞行控制技术进行综述,包括传感器、飞行控制器、电机及螺旋桨、遥控器等方面。
一、传感器四旋翼飞行器的传感器是实现飞行控制的基础,它主要包括加速度计、陀螺仪、磁力计和气压计等。
加速度计用于测量飞行器的加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量飞行器的方向,气压计用于测量飞行器的高度。
这些传感器可以实时地将飞行器的状态信息传输给飞行控制器,从而帮助控制器实现飞行器的稳定飞行和精确控制。
二、飞行控制器飞行控制器是四旋翼飞行器的大脑,它通过接收传感器传来的信息,计算飞行器的状态,再根据飞行器的状态信息来控制电机的转速和螺旋桨的转动角度,从而实现飞行器的稳定悬停、方向飞行、姿态调整等功能。
目前市面上比较常见的飞行控制器有OpenPilot、Pixhawk、Naze32等,它们都能够提供强大的飞行控制功能,同时还支持GPS导航、航点飞行、自动返航等高级功能。
三、电机及螺旋桨四旋翼飞行器通常采用无刷电机驱动螺旋桨进行飞行,电机及螺旋桨的选择直接影响飞行器的性能和稳定性。
在选择电机时需要考虑电机的功率、转速、推力、以及电机的重量和尺寸等参数,同时还需要考虑螺旋桨的直径、螺距、材质等参数。
合理的电机及螺旋桨搭配可以为飞行器提供足够的推力和稳定性,从而保证飞行器的良好飞行表现。
四、遥控器遥控器是飞行器的操控装置,通过遥控器可以实现飞行器的起飞、降落、悬停、前进、后退、左转、右转等操作。
目前市面上比较常见的遥控器有Futaba、FrSky、Spektrum等,它们都能够提供可靠的无线控制信号,从而保证飞行器的操控精准和稳定。
在实际的飞行控制中,通常采用PID控制算法来实现对飞行器的姿态调整和稳定飞行。
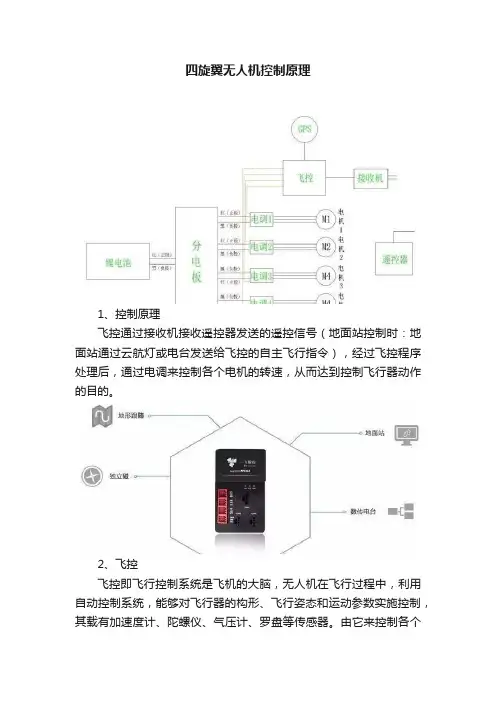
四旋翼无人机控制原理1、控制原理飞控通过接收机接收遥控器发送的遥控信号(地面站控制时:地面站通过云航灯或电台发送给飞控的自主飞行指令),经过飞控程序处理后,通过电调来控制各个电机的转速,从而达到控制飞行器动作的目的。
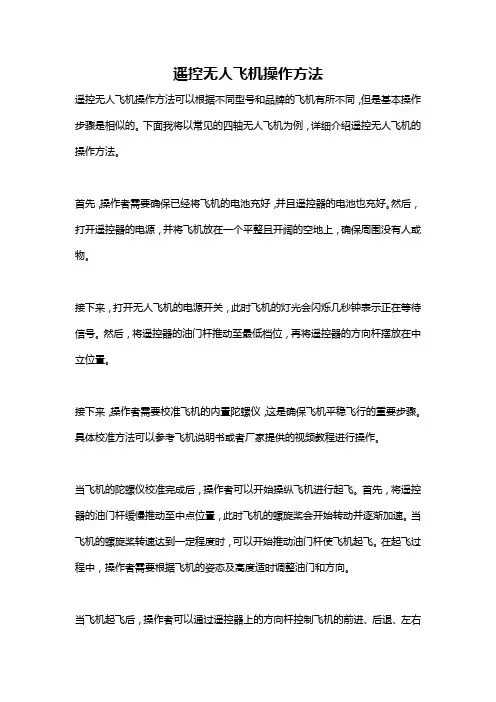
2、飞控飞控即飞行控制系统是飞机的大脑,无人机在飞行过程中,利用自动控制系统,能够对飞行器的构形、飞行姿态和运动参数实施控制,其载有加速度计、陀螺仪、气压计、罗盘等传感器。
由它来控制各个电机的转速进而控制飞机的姿态,加上GPS或差分GPS可完成定点悬停,自主航线飞行等功能。
3、遥控器遥控器模式常用的有美国手和日本手,遥控器上油门的位置在左边是美国手,右边是日本手。
个人觉得美国手比较符合认知规律。
美国手(左边遥杆:上下控制油门,左右控制方向;右边遥杆:上下控制前进后退,左右控制左右移动)日本手(左遥杆:上下控制前进后退,左右控制方向;右遥杆:上下控制控制油门,左右控制左右移动)。
4、电调动力电机的调速系统成为电调,全称电子调速器(Electronic Speed Controller,简称ESC),它根据控制信号调节电动机的转速。
根据动力电机不同可分为无刷调和有刷电调,无刷电调控制无刷电机,有刷电调控制有刷电机。
无刷电调输入是直流,可以接稳压电源或锂电池。
输出是三相交流,直接与电机的三相输入端相连。
选择电调时要注意电调与电机匹配,一般根据额定载荷下通过单个电机的最大电流选择电调。
5、电机无人机上用的电机一般分为有刷电机和无刷电机,有刷电机一般用的微型航模上比如空心杯电机,目前无人机上的电机大部分用的都是无刷电机。
无刷电机通过三相交流电产生一个旋转磁场驱动转子转动,通过pwm控制速度。
小体积、高效率和稳态转速误差小等特点,无刷电机要配合电子调速器(电调)使用。
6、桨螺旋桨,将电机转动功率转化为推进力或升力。
螺旋桨高速转动时,由于桨叶特殊的机构,会在桨上下面形成一个压力差,产生一个向上的拉力,螺旋桨有两个重要的参数,桨直径和桨螺距,单位均为英寸。
遥控无人飞机操作方法遥控无人飞机操作方法可以根据不同型号和品牌的飞机有所不同,但是基本操作步骤是相似的。
下面我将以常见的四轴无人飞机为例,详细介绍遥控无人飞机的操作方法。
首先,操作者需要确保已经将飞机的电池充好,并且遥控器的电池也充好。
然后,打开遥控器的电源,并将飞机放在一个平整且开阔的空地上,确保周围没有人或物。
接下来,打开无人飞机的电源开关,此时飞机的灯光会闪烁几秒钟表示正在等待信号。
然后,将遥控器的油门杆推动至最低档位,再将遥控器的方向杆摆放在中立位置。
接下来,操作者需要校准飞机的内置陀螺仪,这是确保飞机平稳飞行的重要步骤。
具体校准方法可以参考飞机说明书或者厂家提供的视频教程进行操作。
当飞机的陀螺仪校准完成后,操作者可以开始操纵飞机进行起飞。
首先,将遥控器的油门杆缓慢推动至中点位置,此时飞机的螺旋桨会开始转动并逐渐加速。
当飞机的螺旋桨转速达到一定程度时,可以开始推动油门杆使飞机起飞。
在起飞过程中,操作者需要根据飞机的姿态及高度适时调整油门和方向。
当飞机起飞后,操作者可以通过遥控器上的方向杆控制飞机的前进、后退、左右平移。
根据遥控器的操作方式,操作者可以将方向杆向前倾斜使飞机向前飞行,向后倾斜使飞机向后飞行,向左倾斜使飞机向左平移,向右倾斜使飞机向右平移。
同时,可以通过转动遥控器上的转向杆来旋转飞机。
在操作过程中,操作者需要根据飞机的姿态及高度适时调整油门和方向。
另外,多数遥控无人飞机都配有一些特殊的功能,如头向定向飞行、自动回航等。
这些功能可以通过遥控器上的各种按钮进行控制。
在使用这些特殊功能前,操作者需要提前了解和熟悉飞机的相关功能。
最后,当飞行结束时,操作者需要将飞机缓慢降落至地面。
在降落过程中,操作者需要逐渐降低油门,同时根据飞机的姿态适时调整方向杆,使飞机平稳着陆。
待飞机完全停稳后,关闭飞机的电源开关和遥控器的电源开关。
需要注意的是,在飞行过程中,操作者需要时刻注意飞机的剩余电量和信号强度。
四轴飞行器无线通讯及上位机设计摘要四轴飞行器,又称四旋翼飞行器,因其起飞和降落所需空间少,在障碍物密集环境下的超控性高,以及它飞行姿态保持平稳能力强的优点,在民间和军事领域有广泛的应用前景。
其中,小型四轴飞行器的研究近年来趋成熟,并未自动控制,先进传感器技术以及计算机科学等诸多技术领域的融合研究提供了一个平台。
本文通过对四轴飞行器的性能指标的分析,明确设计思路及原理,围绕四轴飞行器无线通讯系统、上位机程序等的设计展开讨论,并确定可行方案。
最终提出使用以2.4MHz的无线遥控对其四轴飞行器进行通讯,使用的是NRF24L01无线通讯模块,四轴飞行器的上位机则用QT进行设计以达成目的。
本次毕业设计主要通过设计上位机控制的飞行器,掌握控制系统的一般设计方法,熟悉常用的元器件,对所学单片机知识进一步强化,了解电路调试仿真的基本方法,培养综合应用所学理论知识来指导设计的能力。
关键字:四轴飞行器,无线通讯,计算机科学Quadrotors’wireless communications and software designAbstractAxis aircraft, also known as four-rotor aircraft,Rotary-wing air-crafts have many military and civilian applications due to their requiring small areas for taking off and landing,great maneuverability in Obstacle-heavy environment and great ability to maintain the position and orientation.The research of small scale quad rotors,one kind of rotary wing air-crafts,have gradually become mature in recent years,and also provided an important platform for investigations in such fields as the autonomous control,advanced sensor technology and computer science.This paper analyzes the performance of four-axis aircraft, a clear design ideas and principles, around quadrocopter wireless communications system designed PC program like to discuss and identify possible options. Finally proposes the use of a wireless remote control aircraft 2.4MHz its axis of communication, using wireless communication module NRF24L01, four aircraft of the PC is used to achieve the purpose of designing QT.The graduation project is mainly controlled by the PC design aircraft, master control system design methods are generally familiar with common components, to further strengthen the learning MCU knowledge to understand the basic method of circuit simulation and debug, develop comprehensive application theoretical knowledge ability to guide the design.Key words: Quadrocopter, Wireless communication, Computer Science目录第一章绪论 (4)1.1 四轴飞行器的发展和现状 (4)1.2 无线通讯概念 (4)1.3 上位机概念 (5)第二章单片机下位机设计 (7)2.1 主要芯片 (7)2.2 无线模块 (8)2.2.1 主要特点 (8)2.2.2 引脚功能 (8)2.2.3 工作模式 (10)2.2.4 工作原理 (10)2.2.5 配置字 (11)2.2 SPI协议 (12)2.3 单片机的通讯技术 (13)2.3.1并行通信 (13)2.3.2 串行通信 (14)2.4 串行通信的方式 (16)2.4.1 单工模式 (16)2.4.2 半双工模式 (16)2.4.2 全双工模式 (17)2.3 系统电路设计 (18)2.4.1 控制器无线模块 (18)2.4.2 四轴飞行器无线模块 (19)2.4 下位机程序设计 (21)第三章基于QT的上位机设计 (22)3.1 Qt工具简介 (22)3.2 Qt窗口部件 (23)3.3 Qt对象模型 (23)3.4 Qt的容器类 (24)3.5 Qt2D绘图 (24)3.5.1基本图形的绘制和填充 (25)3.5.2 坐标系统 (25)3.5.3 其他绘制 (26)第四章系统整体调试 (27)4.1 系统整体流程设计 (27)4.2系统调试 (29)4.3 调试结果分析 (29)第五章结束语 (30)第一章绪论1.1 四轴飞行器的发展和现状四轴飞行器是四桨、非共轴多旋翼飞行器,属于多旋翼飞行器的一种,是一种典型的、完全利用电子控制手段取代机械控制手段的飞行器之一。
四旋翼无人机原理
四旋翼无人机是一种飞行器,由四个独立旋转的螺旋桨提供推力和操纵力。
其工作原理主要包括气动、电力和控制三个方面。
在气动方面,四旋翼无人机的螺旋桨凭借高速旋转来产生升力。
通过调整螺旋桨的旋转速度和角度,可以控制无人机的升降、前进、后退和悬停等动作。
在电力方面,四旋翼无人机通常由电动机驱动。
这些电动机通过内置的电子调速器来控制转速,并根据用户输入的指令调整螺旋桨的旋转速度。
电力系统还配备了锂电池供电,提供无人机所需的电能。
在控制方面,四旋翼无人机通过无线遥控器或自动飞行控制系统进行操作。
遥控器通过发送无线信号,控制飞行器的姿态和动作。
自动飞行控制系统通常由陀螺仪、加速度计和飞行控制器等组件组成,用于感知无人机的状态,并根据事先设定的飞行路径和任务执行相应的动作。
综上所述,四旋翼无人机通过螺旋桨产生升力,通过电动机提供动力,并通过遥控器或自动飞行控制系统进行控制。
这种飞行器具有垂直起降、悬停能力强的特点,广泛应用于航拍、物流配送、科学研究等领域。
四旋翼飞行器飞行控制技术综述四旋翼飞行器是一种由四个旋翼组成的无人机,可以垂直起降和定点悬停,具有灵活性和机动性。
它的飞行控制技术可以分为姿态控制和位置控制两种基本类型。
姿态控制是指控制飞行器姿态(包括横滚、俯仰和偏航),而位置控制则是控制飞行器的定点飞行或航线飞行。
下面将对这两种控制技术进行详细介绍。
一、姿态控制技术1. 传统PID控制PID控制是一种经典的控制方法,它通过比例、积分和微分三个分量的组合来调节系统的输出。
在四旋翼飞行器中,PID控制可以用来控制姿态,使飞行器保持平稳的飞行状态。
通过对角速度和角度的反馈控制,可以实现对飞行器姿态的精确控制。
但是PID控制也存在一些问题,比如对于非线性系统和参数变化的系统,PID控制的性能会受到影响。
2. 模糊控制模糊控制是一种可以应对非线性系统和模糊环境的控制方法。
在四旋翼飞行器中,可以利用模糊控制来实现对姿态的精确控制。
通过建立模糊规则库,可以将模糊的输入与输出进行映射,实现对飞行器姿态的控制。
模糊控制可以有效地应对系统的非线性特性,但是对规则库的设计和参数的选择需要较大的经验和技巧。
3. 神经网络控制4. 遗传算法控制遗传算法是一种模拟生物进化的优化算法,可以用来优化系统的控制参数。
在四旋翼飞行器中,可以利用遗传算法来寻找最优的姿态控制参数,从而实现对飞行器姿态的精确控制。
遗传算法能够全局寻优,但是需要大量的计算资源和较长的优化时间。
1. GPS定位控制GPS定位是一种全球定位系统,可以实现对飞行器位置的精确控制。
在四旋翼飞行器中,可以利用GPS定位进行位置控制,实现定点飞行或航线飞行。
通过GPS模块获取飞行器的位置信息,可以实现对飞行器位置的精确控制。
但是GPS在室内或密集城市地区信号可能不太可靠。
3. 惯性导航控制惯性导航是一种通过加速度计和陀螺仪获取飞行器运动信息,并通过积分计算得到飞行器位置信息的导航方法。
在四旋翼飞行器中,可以利用惯性导航进行位置控制,实现对飞行器位置的精确控制。
飞行器遥控原理
飞行器遥控原理是通过无线通信技术实现的。
遥控器和飞行器之间通过无线电信号进行通信,从而实现随时随地对飞行器的控制。
飞行器遥控系统一般由两部分组成:遥控器和接收器。
遥控器是由遥控器电路和发送器组成,用于发送信号控制飞行器。
接收器则负责接收并解码遥控器发送的信号,并将信号传递给飞行器的控制系统。
遥控器通过按钮、摇杆、开关等控制元件,将操作信号转化为电信号。
这些电信号经过遥控器电路处理后,被发送器转化为无线电信号,并以一定频率进行广播。
接收器接收到无线电信号后,利用天线将信号转化为电信号,并经过解调和解码等过程,将信号还原成控制信号。
这些控制信号被传递给飞行器的控制系统,控制飞行器的动作,如上下、前后、左右的移动,以及翻转、旋转等动作。
在遥控原理中,通常使用射频技术,即利用射频信号进行通信。
遥控器和接收器之间通过指定的频率进行通信,确保信号的传输和接收的准确性和稳定性。
同时,还可以通过编码和加密等方式,增强遥控系统的安全性,防止其他无关的信号对飞行器的控制产生干扰。
总的来说,飞行器遥控原理是通过遥控器将操作信号转化为无线电信号,经过接收器接收并解码后,控制飞行器的动作,实
现对飞行器的远程操控。
这一原理的应用使得飞行器具备了更加灵活和自由的飞行能力,为飞行体验和任务执行提供了便利。
西华大学610039摘要:在对我很感兴趣的项目微型四轴飞行器进行了功能描述的基础上展开了对系统深入研究的方案设计。
该系统(装置)主要由飞控,遥控,蓝牙或WIFI模块,通信模块等组成。
飞控是由stm32f103作为主控,采用MPU6050作为惯性测量单元。
遥控是由arduino作为主控。
通信运用2.4G无线模块。
在AD环境中完成对飞控的的设计。
在keil 5中完成软件的设计。
然后,通过proteus软件完成飞控的模块的仿真与调试。
最后,分析了项目的计划完成情况。
关键词:四轴飞行器控制 stm32 通信设计引言随着社会的发展和科技的进步,我们迎来了新的时代。
在这个高速发展时代,所有的物品都在日新月异的变化。
我们小时候的纸飞机玩具变成了现在的遥控飞机,其中的四轴飞行器备受大众喜欢。
但是四轴飞行器的用处还有多,如林业,侦察,航拍,运输,娱乐观赏等领域,目前热门的航拍就是基于稳定四轴及云台搭建的平台实现,然后其他邻域应用还有相当的潜力。
四轴飞行器将会是很有潜力和未来需求的,代替人类运输,派遣去危险的地方拍摄,或者是交通,个人飞行器等等。
所以四轴飞行器以后一定可以成为主流产品,在生活的方方面面都可能会用到。
1项目1.1 项目描述近年来,国内科技领域对四轴飞行器的研究如火如荼,相关技术得到了迅速的发展。
随着信息化时代的蓬勃发展, 科学技术不断更新, 飞行器被广泛的应用在军事侦查、航拍以及民用快递运输等诸多行业。
四轴飞行器结构简单,操作灵活,单位体积内可提供巨大的升力,适合在狭窄环境中飞行,携带各种电子设备可执行各种任务,例如军事侦察、定位跟踪、农田监测等,在军事、民用等领域均有广泛的应用和广阔的前景。
本项目设计了一种基于STM32的微型四轴飞行器控制系统,以STM32单片机为主控制器,MPU6050为惯性测量单元模块核心,3.7V锂电池供电,通过蓝牙模块或wifi模块实现在手机App上来控制飞行器,或者通过自制遥控器来控制。
四旋翼飞行器飞行控制技术综述四旋翼飞行器是一种利用四个独立旋转的螺旋桨来实现飞行的航空器。
它可以垂直起降,并且具有灵活的飞行能力,因此在无人机、航拍等领域得到了广泛的应用。
要保证四旋翼飞行器的安全飞行,飞行控制技术起着至关重要的作用。
本文将对四旋翼飞行器的飞行控制技术进行综述,包括飞行原理、飞行控制系统、姿态稳定控制、导航控制、避障技术等方面的内容。
一、飞行原理四旋翼飞行器的飞行原理是利用四个螺旋桨产生的升力来支撑整个飞行器,再通过改变螺旋桨的转速和倾斜角来实现飞行方向和姿态的控制。
螺旋桨的旋转产生的气流通过空气动力学原理产生升力,从而支持飞行器的重量。
通过改变四个螺旋桨的转速和相对倾斜角,可以控制飞行器的上升、下降、向前、向后、向左、向右的运动。
利用螺旋桨的差速旋转可以实现飞行器的姿态控制,从而使得飞行器可以实现各种飞行动作。
二、飞行控制系统飞行控制系统是四旋翼飞行器的核心部件,它由传感器、处理器、执行器等多个部分组成,用于感知环境、执行控制指令,实现飞行器的姿态稳定控制、导航控制和避障等功能。
传感器用于获取飞行器的姿态、位置、速度等信息,包括加速度计、陀螺仪、磁力计、气压计等。
处理器用于处理传感器获取的数据,并根据飞行器的姿态、位置和控制指令来生成执行器的控制信号,执行器包括电动调节器和螺旋桨。
飞行控制系统的核心是飞控芯片,它是飞行控制系统的“大脑”,负责控制飞行器的姿态稳定、导航和飞行动作的执行。
常用的飞控芯片包括Pixhawk、Naze32、Ardupilot等,它们具有强大的计算能力和丰富的控制算法,可以实现飞行器的高度稳定性和精确控制。
三、姿态稳定控制姿态稳定控制是指通过控制飞行器的姿态角度来实现飞行器的稳定飞行。
四旋翼飞行器的姿态包括俯仰角、横滚角和偏航角,分别对应飞行器绕前后轴、左右轴和上下轴的转动姿态。
姿态稳定控制主要通过改变四个螺旋桨的转速和相对倾斜角来实现,可以采用PID控制算法、自适应控制算法等方法来实现。
四轴无人机飞行原理
四轴无人机是一种能够进行垂直起降与水平飞行的无人驾驶飞行器,也被称为多旋翼无人机。
它由四个旋转的螺旋桨驱动,它们被固定在四个支架上,构成了四轴结构。
四轴无人机的飞行原理是通过改变每个螺旋桨的旋转速度来控制飞行器的运动,其中位于前两个支架的螺旋桨旋转方向与位于后两个支架的螺旋桨旋转方向相反。
通过对不同螺旋桨的转速实现对四轴无人机的控制,从而实现飞行。
四轴无人机的控制是通过无线遥控器或预先编程的自动化航向系统进行的。
通过遥控器,飞机的操作员可以控制飞机的前后,左右,上下和方向,同时还能够进行高度和方向的锁定。
自动驾驶系统可以根据预先编程的航路自主飞行。
在自动驾驶模式下,无人机可以执行各种任务,例如搜寻和救援行动,监测和测量等等。
四轴无人机的内置传感器如陀螺仪和加速度计可以识别姿态和位置,并通过飞控器来控制旋转速度和方向。
其中,一个传感器可以测量四轴无人机围绕三个轴旋转的角度,以提供飞机的最终姿态。
通过飞控器,控制信号被发送到四个电机以平衡飞艇,调整位置和姿态,从而完成飞行任务。
总的来说,四轴无人机的飞行原理是通过调整螺旋桨的旋转速度和方向来控制飞机的运动,再通过内置传感器与控制系统的配合,完成各种复杂的飞行任务。
这使得无人机在很多领域得到了广泛的应用,如农业、物流、安全监测等。