基于车载激光系统的地面三维数据获取技术研究
- 格式:doc
- 大小:31.50 KB
- 文档页数:7
基于车载三维激光扫描的城市道路竣工测量探讨贾峻峰广州市城市规划勘测设计研究院 广东广州 510060摘要:车载三维激光扫描系统融合了多种传感器和数据源,可以自动、迅速地获取道路的全方位信息。
其扫描速度迅捷、数据信息丰富、精确度高、采集过程安全简单,并能节省人力。
此技术显著提高了外业生产效率,并降低了生产成本。
对车载三维激光扫描技术在道路工程竣工测量中的内外业处理流程的研究结果表明:该技术的精度可达到1∶500测图精度要求,满足城市高架路竣工规划测绘的精度需求。
该技术方案是切实可行的,且能高效地提高生产效率。
关键词:车载三维激光扫描 道路竣工测量 点云数据精度 测图精度中图分类号:U415文献标识码:A 文章编号:1672-3791(2024)02-0142-03 Exploration of Urban Road Completion Survey Based on Vehicle-Mounted 3D Laser ScanningJIA JunfengGuangzhou Research Institute of Urban Planning, Survey and Design, Guangzhou, Guangdong Province, 510060ChinaAbstract:The vehicle-mounted 3D laser scanning system integrates multiple sensors and data sources, and it can automatically and quickly obtain comprehensive information of the road. It has fast scanning speed, rich data infor‐mation and high accuracy, and the collection process is safe and simple and can save manpower. This technology significantly improves field production efficiency and reduces production costs. The article provides a detailed in‐troduction of the internal and external processing flow of vehicle-mounted 3D laser scanning technology in the completion measurement of road engineering. Rresearch results indicate that the accuracy of this technology can reach 1∶500 mapping accuracy requirements, and meet the accuracy requirements of urban elevated road comple‐tion planning and surveying. This technical solution is feasible, and it can efficiently improve production efficiency. Key Words: Vehicle-mounted 3D laser scanning; Road completion measurement; Point cloud data; Mapping accuracy1 三维激光扫描技术工作原理三维激光扫描仪系统主要集成三维激光扫描仪、惯性仪、全景相机、测速仪、卫星定位模块和车辆刚性平台装配控制模块[1]。
测绘技术中的车载激光雷达原理与数据处理方法详解车载激光雷达(Mobile LiDAR)作为一种新兴的测绘技术,以其高精度、高效率的特点,在地理信息、城市规划、交通管理等领域得到了广泛应用。
本文将详细介绍车载激光雷达的原理以及相关的数据处理方法。
一、激光雷达原理激光雷达利用激光束对目标进行扫描,通过测量激光束的往返时间和方向来获取目标的三维坐标信息。
车载激光雷达由激光器、接收器、扫描镜头和数据处理系统等部件组成。
1. 激光器:激光器产生高能量的激光束,通常采用固态激光器或半导体激光器。
2. 接收器:接收器接收激光束反射回来的信号,通常采用高灵敏度的光电探测器。
3. 扫描镜头:扫描镜头通过旋转或振动将激光束聚焦在不同方向上,实现对目标的全面扫描。
4. 数据处理系统:数据处理系统将接收到的激光点云数据进行坐标转换、滤波、配准等处理,生成三维点云模型。
二、数据处理方法车载激光雷达获取的点云数据量庞大,如何高效地处理这些数据成为了一个关键问题。
以下介绍几种常见的数据处理方法。
1. 数据滤波:由于车载激光雷达工作环境复杂,可能受到树木、电线等干扰,导致点云数据中存在噪点。
常用的数据滤波方法有高度阈值滤波、曲率滤波等,可以去除噪点,提高数据的精度和稳定性。
2. 地面提取:在车载激光雷达的应用中,往往需要提取地面信息,例如用于数字地图、道路设计等。
地面提取方法通常利用点云数据的高度信息,结合地形特征进行分析,通过平面拟合或者分割算法提取地面点。
3. 物体识别:车载激光雷达可以对道路上的物体进行自动识别,例如车辆、行人等。
物体识别方法往往基于机器学习或深度学习技术,通过对点云数据进行特征提取和分类,实现对不同物体的准确识别和定位。
4. 三维重建:车载激光雷达可以将获取的点云数据进行三维重建,生成真实世界的模型。
三维重建方法通常利用基于体素的体素网格分割算法,在处理大规模点云数据时具有较高的效率和精度。
5. 室内定位:车载激光雷达不仅可以在室外环境中使用,也可以应用于室内定位。
车载激光扫描技术在公路测量中的应用摘要:传统的公路测量工程主要采用水准仪、全站仪或RTK等测量方法联测得到数据。
针对传统测量方法工作量大,效率低、干扰正常交通秩序等问题,采用车载激光扫描测量系统,可快速获得路面点坐标信息及道路两侧情况。
本文结合项目实际,阐述了车载激光扫描技术的基本原理和作业技术流程,通过在公路测量的应用,分析了数据采集和处理中的关键技术,并通过点云数据提取获得符合精度要求的目标点的坐标和高程。
关键词:车载;激光扫描技术;公路测量;一、车载激光扫描技术的工作原理及特点1.1工作原理车载激光扫描系统是将三维激光扫描仪、导航定位系统和惯导系统联合使用,实现对动态扫描快速定位的测量系统。
其工作原理是车辆在移动过程中,GPS测量记录扫描仪运行轨迹在世界坐标系中的实时位置;激光扫描仪则记录目标的大小、形态和距离;惯导系统则计算扫描仪的运行姿态;然后利用时间和空间上的检校信息,通过统一的地理参考和解析处理实现动态实时的获取目标点三维坐标信息的功能。
车载激光扫描系统主要由以下几部分组成:三维激光扫描仪、GNSS天线、高精度IMU、电子转台、里程计、线阵相机和笔记本电脑;三维激光扫描仪﹑相机和惯导系统固定在电子转台上,里程计安装在车辆的轮胎上。
1.1.1车载激光扫描系统实现技术同步车载多传感器同步技术是车载激光扫描技术的重中之重。
首先通过同步控制软件将各组件开始数据采集的时间相统一;然后采集数据时以流动站卫星定位接收机的时间为标准,GPS 向激光和惯导系统不断地发秒脉冲与此同时激光与惯导系统向卫星定位接收机的I\O口打标,这样就能将激光和惯导系统采集到的数据贴上世界协调时的标签,而激光发出的秒脉冲可以通过电子转台和线阵相机的控制及来实现时间上的同步。
1.1.2 GPS和 IMU相辅相成GPS可以提供非常准确的位置,有着较高的稳定性。
虽然利用GPS 差分定位技术可以得到厘米级的精度,但由于大型的构建筑物的遮挡或多路径效应,经常会遇到一直处于浮动状态、定位精度差的情况。
基于车载点云的道路三维实景建模方法研究
徐辛超;丁雪
【期刊名称】《测绘与空间地理信息》
【年(卷),期】2024(47)2
【摘要】传统的基础测绘存在组织管理固化、服务模式落后、产品形式单一等问题,在新型基础测绘体系下形成了全要素三维实景模型这一成果。
本文探讨基于车载点云进行城市道路三维实景建模方法研究,并以某城市主干路为试验对象,对道路及道路两侧部件点云数据进行矢量化得到道路全要素地形数据,以部件点云数据为参考结合外业调绘尺寸用3ds Max软件制作道路部件模板库,并结合点云数据和矢量数据对各类要素进行单体化,最后将道路模型和部件模型融合。
结果表明,基于车载点云数据构建的城市道路全要素实景模型不仅可以保证场景的完整性和真实性,还减少了作业时间和成本,实现了各类模型之间的无缝结合,制作完成的模型精度也能满足项目精度要求。
【总页数】4页(P17-20)
【作者】徐辛超;丁雪
【作者单位】辽宁工程技术大学测绘与地理科学学院
【正文语种】中文
【中图分类】P225.2
【相关文献】
1.基于车载LiDAR点云的道路建模研究
2.基于车载激光点云的三维道路精细化建模
3.基于车载点云数据制作道路全要素三维实景模型
4.基于LiDAR点云数据分布差异的植被三维实景建模算法
5.基于多源激光点云数据的大型互通式立交桥及道路实景建模
因版权原因,仅展示原文概要,查看原文内容请购买。
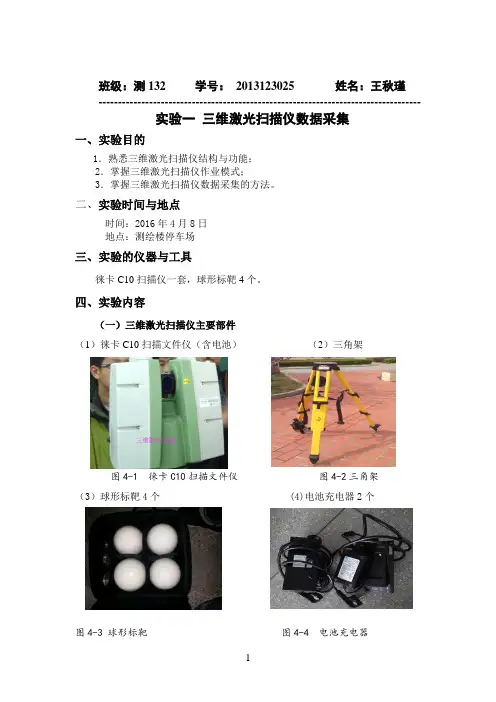
班级:测132 学号:2013123025 姓名:王秋瑾----------------------------------------------------------------------------------- 实验一三维激光扫描仪数据采集一、实验目的1.熟悉三维激光扫描仪结构与功能;2.掌握三维激光扫描仪作业模式;3.掌握三维激光扫描仪数据采集的方法。
二、实验时间与地点时间:2016年4月8日地点:测绘楼停车场三、实验的仪器与工具徕卡C10扫描仪一套,球形标靶4个。
四、实验内容(一)三维激光扫描仪主要部件(1)徕卡C10扫描文件仪(含电池)(2)三角架图4-1 徕卡C10扫描文件仪图4-2三角架(3)球形标靶4个(4)电池充电器2个图4-3 球形标靶图4-4 电池充电器(5)电源线1个,外接电缆1 个(6)内置扫描软件图4-5 电源线和外接电缆图4-6 内置扫描软件(二)三维激光扫描仪数据采集的方法(1)选取合适的扫描对象测绘132第三组选取汽车作为扫描对象(2)扫描仪安置在【主菜单】中点击【状态】图标(图4-7),在弹出的【状态菜单】中点击【整平&激光对中】图标(图4-8),调节脚螺旋使圆水准器气泡居中(图4-9),在弹出的【整平&激光对中】菜单中将扫描仪对中并整平(图4-10)。
图4-7主菜单图4-8状态菜单图4-9 圆水准器气泡居中图4-10对中整平菜单(3)新建工程文件在主菜单,点击【管理】图标,在弹出的【管理菜单】中点击【工程】图标(图4-11),在弹出的【工程】菜单中点击【新建】按钮来创建新的工程文件。
在【新建工程】菜单中输入名称:ch132,完成后点击回车按钮完成该项的输入(图4-12),待所有的项目编辑完成之后点击【储存】按钮(图4-13)。
图4-11管理菜单图4-12新建工程输入面板图4-13新建工程菜单(4)设置测站点在建立新的工程文件后在主菜单,点击【扫描】图标,在弹出的【开始扫描】菜单中点击【新建站】按钮,由于是采用标靶测量,所以仪器自身设置测站号(5)目标物扫描在【主菜单】中点击【扫描】图标,在弹出的对话框中设置扫描参数信息,包括视场、分辨率、拍照控制、过滤器。
地面三维激光扫描总结报告
地面三维激光扫描技术是一种以激光为载体进行的三维数据采集技术。
它通过利用激光发射器发射激光束,经过地面反射,激光能量被地物吸收,再由接收器接收反射回来的激光能量,根据时间差值、频率差值或相位差值来确定目标物的三维空间坐标,并将数据传输到计算机进行处理。
与传统的测量手段相比,地面三维激光扫描技术具有以下优点:
1. 高精度:激光扫描仪能够以非常高的精度和准确度获取地面数据,精度可达毫米级别,可为后续工程提供高质量的数据支持。
2. 实时性:通过激光扫描仪可以在很短的时间内获取目标地面的三维数据,采样速度最高可达每秒数十万个数据点,非常适合现场测量需求。
3. 安全性:激光扫描仪可以远距离获取地面数据,不需要人员接触目标地面,有效保障了现场工作的安全性,减少了工作人员的伤害风险。
4. 灵活性:激光扫描技术可以适应不同地形和地貌的测量需求,可快速实现点云数据采集和处理,方便数据的应用和进一步处理。
在工程应用方面,地面三维激光扫描技术具有广泛的应用价值。
它可用于建筑物立面测量、道路桥梁设计、隧道施工监测、城市规划与设计、水利工程巡查等多种领域,并得到了广泛的应用和推广。
随着科学技术的不断发展,地面三维激光扫描技术也在不断改进和提升。
目前,新型的激光扫描仪不仅扫描速度更快、精度更高,而且可以应用于更加复杂的地形和地貌。
未来,随着激光扫描技术的不断发展和普及,我们相信地面三维激光扫描技术将会在更加广泛的领域得到应用,为我们的科技进步和社会发展注入新的动力。
简述地面三维激光扫描数据采集流程一、地面三维激光扫描的基本原理地面三维激光扫描是利用激光束对地面上的物体进行扫描,通过测量激光束从发射到接收经过的时间,计算出激光束在空间中的坐标位置,从而得到物体的三维坐标信息。
激光扫描仪通常由激光发射器、接收器、扫描镜等组成,其中激光发射器发射出的激光束被扫描镜反射,经过接收器接收并记录下激光束的时间和强度。
二、地面三维激光扫描数据采集流程地面三维激光扫描的数据采集流程通常包括数据准备、设备设置、扫描操作和数据处理等步骤。
1. 数据准备在进行地面三维激光扫描之前,需要准备好相关的数据,包括地面区域的范围、扫描任务的目的和要求等。
同时,还需要对扫描区域进行清理,清除障碍物和遮挡物,以保证扫描的准确性和完整性。
2. 设备设置将激光扫描仪放置在合适的位置,并与电脑或数据采集设备连接。
根据实际情况设置扫描仪的参数,如扫描分辨率、扫描速度、扫描角度等。
同时,还需校准扫描仪,确保扫描仪的准确性和稳定性。
3. 扫描操作启动激光扫描仪,开始进行扫描操作。
通常,扫描仪会自动水平和垂直扫描地面区域,并记录下每个扫描点的坐标位置和强度值。
扫描过程中需要保持扫描仪的稳定,避免震动和移动,以保证数据的准确性。
4. 数据处理扫描完成后,将采集到的数据导入到计算机或数据处理软件中进行处理。
首先,对原始数据进行滤波和去噪处理,去除不必要的干扰和噪声。
然后,根据扫描点的坐标位置和强度值,生成地面的三维模型或点云数据。
最后,对数据进行分析和处理,提取出需要的信息,如地形、建筑物、道路等。
三、总结地面三维激光扫描是一种高精度、高效率的数据采集方法,广泛应用于地理测绘、城市规划、建筑设计等领域。
通过本文的介绍,我们了解到了地面三维激光扫描的基本原理和数据采集流程。
希望本文能为读者对地面三维激光扫描有一个初步的了解,并对相关领域的应用提供帮助。
自动驾驶系统中的激光雷达技术与数据融合自动驾驶技术是当今互联网时代的重要发展方向之一,被广泛看好并投入大量资源进行研发和应用。
其中,激光雷达技术与数据融合在自动驾驶系统的实现中扮演着重要的角色。
本文将深入探讨激光雷达技术在自动驾驶系统中的应用,并从数据融合的角度来讨论如何提高自动驾驶系统的性能和可靠性。
自动驾驶系统的核心是通过感知和理解环境来做出智能决策。
激光雷达技术作为一种主要的感知设备,在自动驾驶系统中起着至关重要的作用。
激光雷达通过发射激光束并测量其回波时间来获取周围环境的三维点云数据。
这些数据可以提供精确的距离、方向和高度等信息,有效地描绘出车辆周围的物体、路面和道路结构等。
在自动驾驶系统中,激光雷达技术的应用可以分为两个方面:目标检测与跟踪、环境建模与地图构建。
目标检测与跟踪是指通过激光雷达感知设备识别并追踪周围物体的位置、速度和形状等信息。
通过将这些信息与地图数据进行融合,自动驾驶系统可以实时感知其他车辆、行人和障碍物等,并预测其未来的运动轨迹,从而做出相应的驾驶决策。
环境建模与地图构建是指利用激光雷达感知设备获取的点云数据,生成车辆周围的三维环境模型和高精度地图。
这些模型和地图不仅可以用于导航和路径规划,还可以用于车辆定位和场景分析等。
然而,单独使用激光雷达数据存在一些问题,如数据稀疏性和盲区。
为了解决这些问题,数据融合成为了一种常见的解决方案。
数据融合是指将来自不同传感器的数据进行融合处理,以获得更准确、全面的环境感知信息。
目前较常见的数据融合方法是将激光雷达数据与摄像头数据进行融合。
激光雷达提供了准确的距离和形状信息,而摄像头则能够提供丰富的颜色和纹理信息。
将这两者结合起来可以有效地提高物体检测和识别的准确性。
对于那些只在激光雷达数据中难以辨别的物体来说,通过与摄像头数据进行融合处理,可以更好地识别并预测它们的行为。
此外,还可以将激光雷达数据与雷达和车载传感器等其他传感器的数据进行融合。
基于三维激光雷达的道路可通行区域分割提取方法三维激光雷达是自动驾驶领域中常用的传感器之一,能够高效地获取周围环境的三维空间信息。
在自动驾驶中,快速准确地提取道路可通行区域的信息对于保障行车安全至关重要。
本文将介绍一种基于三维激光雷达的道路可通行区域分割提取方法。
首先,三维激光雷达获取的点云数据需要进行预处理。
在这一步骤中,需要对点云数据进行滤波,去除噪点和离群点。
此外,还需要进行地面分割,将地面点云和非地面点云区分开来。
基于此,可以进一步提取出车道信息和路面几何特征。
然后,通过基于栅格的方法对点云数据进行分割。
以栅格为基础,对点云进行分割和分类,便于提取和分析。
利用深度学习中的卷积神经网络对栅格进行分类,可高效地提取目标区域的信息。
在对道路可通行区域的提取中,可以通过对路面栅格进行分类,将道路可通行区域和非道路区域分离开来。
最后,通过对目标区域进行聚类,将具有相似属性的栅格划分为同一类。
可以使用基于距离的聚类算法或基于密度的聚类算法,将区域进行聚类。
聚类后的结果可以用于道路开发和路径规划等应用。
相比于传统的基于图像的方法,基于三维激光雷达的道路可通行区域分割提取方法不仅可以提供更加准确的道路信息,还可以自适应地适应不同的路面和光线条件,具有更好的鲁棒性。
此外,该方法还可以应用于智能停车场、城市规划等领域。
总之,本文介绍了一种基于三维激光雷达的道路可通行区域分割提取方法。
该方法具有快速、准确以及鲁棒性强的优点,可以提高自动驾驶系统的行车安全性和准确性。
除了上述提到的点云预处理、基于栅格的分割和聚类方法,对于道路可通行区域的提取还可以探索多种算法和技术。
一种方法是基于分割算法和规则的识别方式。
通过将点云数据分割成小的三维区域,然后在每个区域中分析其特征,如高度、倾斜角度和颜色等。
然后利用预定义的规则,将满足规则的区域归为道路可通行区域。
该方法通过人工定义规则,可以提高提取的准确性。
另一种方法是基于深度学习的端到端方法。
车载激光点云技术在道路及交通设施管理上的研究与应用2:深圳高速工程顾问有限公司广东深圳摘要:车载激光点云技术在实际应用的过程中能够通过智能建模、云数据处理、地物自动提取等技术,对道路的模型以及道路周边交通设施信息进行收集,为道路与交通设施管理工作提供相应的数据支持。
关键词:车载激光点云技术;道路管理;交通设施管理引言:交通是社会发展过程中研究的重点工作,而伴随着我国的发展,我国也将更多的新技术应用于道路与交通设施管理工作中。
车载激光点云技术便是其中的重点发展技术之一。
本文将对车载激光点云技术在道路以及交通设施管理工作中的作用进行分析。
1.车载激光点云的研究内容交通质量是决定一个地区发展质量的重要因素,而伴随着时代的发展,人们对于交通质量的要求也在不断的提升。
在信息化时代的影响下,车载激光点云技术手段也应用于道路与交通设施管理工作中,为人们提供丰富的道路与交通设施信息与数据,极大程度的提升道路与交通设施的管理质量[1]。
现阶段,车载激光点云技术在应用的过程中主要研究以下几个方面的内容。
(一)智能建模首先,激光点云技术在应用的过程中需要获取激光点云与相机在同一时刻同一位置所获取的信息,之后,依靠所获取的信息,确定其所对应的像素以及空间位置等。
最后,将带有信息的点云数据进行处理,实现数据的可视化显示,自动分类以及智能建模等。
(二)云数据预处理在获取相关的信息后,对数据进行整理、转化、分析等,实现数据的分类,将目标的信息与其他的信息进行分组,提升信息的针对性。
(三)地物自动提取地物自动提取是激光点云技术所研究的重点工程。
其在应用的过程中能够对周边的信息进行准确的分析与判断,获取周边地区的建筑立面、线杆、指示灯等各种数据。
1.车载激光点云在道路及交通设施管理中的应用车载激光点云技术用于道路以及交通设施管理工作中的主要对周边的信息进行收集与处理,从而为我国的道路与交通设施管理提供一定的数据支持。
车载激光点云技术在应用的过程中主要是通过以下几个方面进行信息的收集与整理工作。
车载激光扫描数据的高速道路自动提取方法随着车载激光扫描技术的逐步普及,其在道路提取、地名标注、城市建设等领域已经取得了广泛应用。
在高速公路道路自动提取方面,车载激光扫描技术能够快速、准确地提取出高速公路的道路中心线、车道线以及路沿石等信息,后续还可以进行道路线型分析、车道宽度分析以及交通流量分析等工作。
本文将详细介绍车载激光扫描数据在高速公路道路自动提取方面的方法。
1. 数据获取与预处理车载激光扫描仪的安装位置应该尽量低,以便扫描到道路底部的重要信息,同时还应该考虑传感器的激光能量、发射频率等因素。
在采集激光数据时,应该选择适当的时间段和速度,保证数据的质量和稳定性。
获取完数据后,一些预处理工作还是必要的,例如去除树木、建筑物等遮挡物,去除噪点等。
2. 地面点云数据的分割地面点云是由于普通车载激光扫描系统所采集到的地物点中有比较稳定的地面点,因此将其与所有点进行分离可以大大提高后续的道路提取精度。
地面点云的分割可以采用RANSAC算法来实现,也可以使用一些更先进的方法,例如基于点云密度的Hough变换等。
分割完成后,我们就得到了分离出来地面点云以及其他非地面点云的两部分。
3. 地面法向量估计以及道路中心线提取接下来,在地面点云上进行法向量估计和曲率计算,以得到地面数据的曲线方向信息,然后根据曲率大小过滤掉不符合条件的点云,最后使用曲率不变形(Curvature Invariant Form,CIF)算法提取出道路中心线。
对于CIF算法,可以将其概括为以下三步:(1)选取曲率变化大的点作为道路中心线起点;(2)沿着具有最大曲率的方向找到下一个点,继续延伸直到结束点;(3)将延伸出来的道路中心线转化为直线段,消除其中一些噪点。
4. 车道线提取在道路中心线提取出来以后,需要在其周围进一步提取出车道线的信息。
由于车道线通常是以一定的距离并行于道路中心线的,因此,可以通过在道路中心线两侧横向搜索的方法来提取出车道线位置。
基于车载三维激光扫描的地形图数据采集的研究薛效斌;钱星;马宁【摘要】文章从三维激光扫描仪在测量中的作用入手,重点介绍了三维激光扫描技术在国内的应用现状,并与传统数据采集方式进行了比较.结合应用实例将三维激光扫描技术应用于大比例尺地形图测量,运用这项技术进行外业数据采集,与传统全站仪数据采集进行了精度比较.结果表明了三维激光扫描技术方案能够克服传统测量方式缺点,保证测绘数据质量,能够提高作业效率.【期刊名称】《北京测绘》【年(卷),期】2014(000)001【总页数】4页(P88-90,110)【关键词】地形测量;激光点云;车载;三维扫描【作者】薛效斌;钱星;马宁【作者单位】北京市测绘设计研究院,北京100038;城市空间信息工程北京市重点实验室,北京100038;国家开发银行规划局,北京100031;北京市测绘设计研究院,北京100038;城市空间信息工程北京市重点实验室,北京100038【正文语种】中文【中图分类】P217随着我国经济建设的高速发展,新兴技术与装备的发展应用为测绘地理信息产业注入了强劲动力,测绘技术有了很大的提高,新型的地形图测绘模式在技术上已经有了不少突破,车载移动测图系统就是其中的一种测图模式。
作为目前最新的技术成果,车载移动测图系统在国内外均有较大的发展,很多测绘科研和生产部门都对这种测绘技术进行了广泛的研究和试验。
随着三维激光扫描技术的不断成熟,激光扫描设备的测量距离和测量精度都有了质的飞跃,IMU陀螺精度也有了很大的提高,车载三维激光扫描就可以在城市大比例尺地形图测绘的生产实际中得到应用。
本文的研究目标就是对这一应用进行初步探讨,研究这一新兴测绘技术的先进性和局限性,以及在实际生产中进行大比例尺地形图数据采集应用的可能性。
1 移动测图系统分类一般而言,车载移动测图系统中比较常见的可以分为三类:一是基于立体摄影测量的方式,通过集成多个CCD相机构成立体像对,以数字摄影测量的方式来进行室外场景的室内重建。
路面高精度地图构建技术研究一、路面高精度地图概述路面高精度地图是指充分反映道路路面情况的地图,包括道路几何形状、路面标识、交通标志、挡墙分隔带、路缘带、护栏等信息,并以高精度数据的形式存储和表达。
具有很强的时效性、准确性,并且能够为高精度导航和自动驾驶提供重要的数据支撑。
因此,路面高精度地图已经成为当今智慧交通建设的重要组成部分。
二、路面高精度地图构建技术1. 车载激光扫描技术车载激光扫描技术通过在车顶配备激光扫描器,将地面数据采集到车载计算机中,并利用特定的软件处理形成跟车道形状、路宽、地面高度等图像信息的三维数据。
该技术具有高精度、高效率、高精度等优点,但是其数据采集范围有限,且需要较高的成本投入。
2. 车载卫星定位技术车载卫星定位技术通过全球卫星导航系统,如GPS及其它定位技术,获得车辆驶入的道路的几何形状和位置信息,然后再应用车辆运动学模型规定道路的宽度、长度和高低差等信息。
这一技术反应了现场实际情况,具有数据全面、维护方便、费用低等优点。
3. 线路绘制技术线路绘制技术是一种基于线路数据采集和处理的地图制作技术,主要利用GPS等地理位置方法,获取车辆所在位置的几何形状及特征,并在此基础上对付相应数据标签进行标注,进而生成高精度地图。
这一技术具有操作简单、投入成本低等优点,但是数据处理成本较高,需要较多的人工标注。
4. 智能识别技术智能识别技术利用计算机视觉及机器学习技术,对车辆前置摄像头进行视频图像分析,通过图像处理算法获取视野中的道路相关信息,并快速判定道路边界、交叉口、障碍物等特征的位置、形状等信息,提取高精度地图信息。
该技术数据处理效率高、自动化程度高、成本投入低等优点。
5. 混合技术路面高精度地图的构建技术可以结合多种技术,例如车载激光扫描技术与智能识别技术相结合,可以实现数据全面的同时还能够快速处理;车载卫星定位技术与线路绘制技术结合,可以在对原有道路信息不足的情况下,快速地制作出高质量的道路信息地图。
地面三维激光扫描点云数据处理及建模
地面三维激光扫描点云数据处理和建模是一种基于激光扫描技术获取地面三维点云数据,并对其进行处理和建模的方法。
该方法可以广泛应用于地理测绘、城市规划、环境监
测等领域。
激光扫描技术是通过激光雷达设备对地面进行扫描,得到点云数据。
点云数据是由一
系列包含位置和反射强度信息的点组成的三维空间数据。
激光扫描仪通过发射激光束,测
量激光束与地面的反射时间,并通过测量时间和激光的速度计算地面点的位置。
在获取点云数据后,需要对其进行处理。
点云数据处理包括数据滤波、配准和分割等
步骤。
数据滤波是为了去除噪声点,提取出地面点。
常用的滤波算法有高斯滤波、中值滤
波等。
配准是将多个局部点云数据对齐到一个全局坐标系中,常用的配准方法有ICP算法、基于特征的配准算法等。
分割是将地面点云数据从非地面点云数据中分离出来,常用的分
割算法有基于高度阈值的分割算法、基于形状特征的分割算法等。
在点云数据处理完成后,可以进行点云数据的建模。
点云建模是将点云数据转化为三
维模型的过程。
常见的点云建模方法有曲面重建、拟合和三角化等。
曲面重建是将点云数
据插值为连续的曲面模型,常用的方法有贝塞尔曲面重建、Marching Cubes算法等。
拟合是将点云数据拟合为简化的几何模型,常用的方法有平面拟合、圆柱拟合等。
三角化是将
点云数据转化为三角形网格模型,常用的方法有Delaunay三角剖分、网格化等。
基于激光的三维坐标测量方法及算法研究摘要:激光三维坐标测量是一种高精度的测量方法,广泛应用于工业制造、地质勘察、建筑设计等领域。
本文主要探讨了基于激光的三维坐标测量方法及算法的研究进展,包括激光测距原理、三角测量法、结构光测量法等,并对各种方法进行了比较和评估。
同时,针对激光测量中存在的误差来源,提出了一些改进策略,以提高测量精度和稳定性。
1. 引言随着科技的不断进步,激光三维坐标测量成为了一种高精度、高效率的测量手段。
它以激光束作为测量工具,通过测量物体与激光之间的相互作用,来获取物体在三维空间的坐标信息。
激光测量方法在工业制造中的应用尤为广泛,如机械加工、质量检测、零件装配等。
2. 激光测距原理激光测距是激光三维坐标测量中的关键环节。
激光测距原理主要包括飞行时间法、相位差法和干涉法。
飞行时间法是利用激光束从发射到接收所需的时间计算出距离,相位差法是利用激光束的相位差计算出距离,干涉法是利用激光束与被测物体表面的反射光产生干涉现象计算出距离。
在实际应用中,根据具体情况选择合适的测距原理,以达到最佳的测量效果。
3. 三角测量法三角测量法是激光三维坐标测量中最常用的方法之一。
它基于三角形的几何关系,通过测量已知边长和夹角来计算未知边长。
激光三角测量法主要有两种实现方式,即基于二维扫描和基于三维扫描。
基于二维扫描的方法适用于平面或近似平面的测量,而基于三维扫描的方法则适用于复杂几何形状的测量。
此外,为了提高测量精度,还可以采用多边形测量法和多视图测量法等。
4. 结构光测量法结构光测量法是一种非接触式的激光测量方法,通过投射光栅或光斑到被测物体表面,根据光栅或光斑的形变来计算出物体表面的形状和位置。
常见的结构光测量方法有激光投影法和激光三角法。
激光投影法主要利用光栅图案来测量物体表面的形状和距离,而激光三角法则利用由光斑在物体表面上的投影所形成的三角形来进行测量。
5. 误差源及改进策略在激光三维坐标测量中,存在着各种误差源,如系统误差、随机误差、环境干扰等。
基于车载激光系统的地面三维数据获取技术研究摘要:机载激光雷达系统(Light Detection And Ranging,简称LIDAR)集成了激光扫描仪、全球定位系统(GPS)、高精度惯导系统(IMU)、数码相机,具有同时采集三维地形数据和数字影像的能力。
本文以辽宁省大连市1∶500比例尺地形测量为例,详细介绍了LIDAR 的基本原理、地面三维数据的获取和处理方法,以及数据成果的检测。
关键词:LIDAR POS GPS IMU DTM DSM
机载激光雷达系统(Light Detection And Ranging,简称LIDAR),也叫机载激光雷达,是一种安装在飞机上的机载激光探测和测距系统,它集成了激光扫描仪、差分GPS系统、IMU(Inertial Measurement Unit,惯性量测单元,用以量测飞机平台的飞行姿态)、数码相机。
在动态载波相位差分GPS系统和IMU的支持下,激光扫描系统通过激光扫描器和距离传感器,经由微计算机对测量资料进行内部处理,显示或存储、输出距离和角度等资料,并与距离传感器获取的数据相匹配,经过相应软件进行一系列处理来获取被测目标的表面形态和三维坐标数据,从而进行各种量算或建立立体模型。
在过去十年,机载LIDAR作为精确、快速的获取地面三维数据的工具已经得到广泛的认同。
至2004年全球已经有超过30类不同型号的激光扫描系统投放市场。
加拿大Optech公司生产的ALTM和SHOALS、美国Leica公司的ALS50、瑞典的TopoEye AB公司生产
的TopEye、德国IGI公司的Lite Mapper、法国Toposys公司的Falcon Ⅱ等是当前较成熟的商业系统。
本文以辽宁省大连市1∶500比例尺地形测量为例,主要介绍机载LIDAR基本原理、地面三维数据的获取和处理方法,以及数据的应用。
2 LIDAR数据获取的基本原理
当机载LIDAR航摄飞行时,激光扫描仪发射、接收激光束,对地面进行线状扫描,与此同时,动态GPS系统确定传感器的空间位置(经纬度),IMU测量飞机的实时姿态数据,即滚动、仰俯和航偏角。
由于系统的几个部分同步工作并集成于一体,GPS 和IMU的数据融合极为方便,所以经后期地面数据处理后,即可获取地面的三维数据(见图1)。
3 IDAR数据的获取和处理
3.1 LIDAR设备选择
在辽宁省大连市1∶500比例尺地形测量项目中,高程精度的要求优于0.15 m,我们选择了加拿大Optech公司的ALTM3100。
基于30年的LIDAR生产经验,新一代的ALTM-3100采样频率高达100 kHz,1200 m航高以下高程精度达到0.15 m,平面精度可以达到航高的1/3000,能够满足设计需求。
3.2 航摄高度和飞行时间的选择
LIDAR数据的精度与航摄高度有关,本摄区航摄的目的是为1∶500基础测绘数字产品提供高程数据,为确保测绘成果的质量,根据现行相关技术标准的规定和ALTM-3100的性能规格,以及飞机性能和摄区对航高的约束条件,设计飞行高度为800 m。
LIDAR系统是一个先进的主动传感系统,它不依赖太阳光照,所以在获取地面三维信息时可以考虑夜航。
飞行作业中,需根据测区内实际星历数据情况,选择避开GPS信号较弱时段。
为了避免植被,尤其是农作物对真实地面的干扰,建议选择秋冬季节进行航飞。
所以大连测区的航摄时间选择在2006年10月至2007年1月间,并且增加了夜航。
3.3 LIDAR数据的获取
大连1∶500地形测量项目共涉及飞行11个架次,其中1个架次为检校场飞行,用于ALTM-3100系统检校,其他10个架次为测区航摄飞行。
全测区面积810 km2,航线总计81条,总长2613.5 km,飞行高度800 m,有效飞行时间为29 h30 min。
激光扫描仪脉冲频率100 kHz,扫描频率43 Hz,扫描角度21度,旁向重叠率30%,激光点地面点间距0.52 m。
3.4 LIDAR数据的处理
LIDAR航摄飞行结束后,要尽快对航飞数据进行有效性评价,决定是否需要补飞或重飞,进而解算激光点数据,并进行分类处理。
3.4.1 LIDAR数据处理流程
原始数据解码:原始采集的激光数据与POS数据(定位定向数据,包括DGPS数据和IMU数据)需要进行解码,从而获得GPS文件,IMU 文件,激光点文件等;POS数据处理:机载POS与地面基站GPS进行差分和融合,获得精确坐标;激光数据处理:处理后的POS数据与激光点数据融合,获得地面坐标;输出激光点文件。
3.4.2 LIDAR数据处理说明
解算原则,方法:实际解算,采用多边形范围输出,以单条航线存储为一个激光点文件;坐标系统,采用WGS84椭球,UTM投影坐标系;POS处理说明:处理基站时,使用辽宁省的GPS控制网,并同时保证机场附近架设一个基站,由观测手簿获得基站坐标及天线高;使用基站时,尽可能多的使用离测区范围最近的所有基站。
航带重叠处理:航线与航线之间重叠的部分,根据航线,将重叠部分的数据划分出去,减小数据量。
3.4.3 LIDAR数据分类处理
LIDAR数据包括很多类型,例如房屋建筑、植被、水体、地表、管线等,如果要提取DTM(Digital Terrain Model,数字地形模型),就必须将非地表类型点和地表点分离开,也就是要进行数据分类。
目前基于LIDAR数据点滤波的方法绝大部分都是基于三维激光数据脚点的高程突变等信息进行的,概括来讲主要有移动窗口法,迭代线性最小二乘
内插法,基于地形坡度滤波和移动曲面拟合法等几种。
大连测区为平原地貌,地势低平,绝大部分地区海拔不足5 m,最大相对高度不足8 m,海拔高程一般在2~3 m。
根据地形情况,首先剔除噪声点,包括云,折射等造成的高程异常点;然后设定适合的参数,采用TerraScan软件(芬兰Terrasoild公司出品)自动分类提取地面点。
TerraScan软件是依据移动窗口法来分类提取地面点的。
3.4.4 坐标转换
利用POS动态定位计算出来的激光点坐标属于WGS84坐标体系,而大连测区采用的是80坐标系,因此需要通过坐标转换,获得最终成果。
坐标转换包括两个方面:平面坐标体系转换和正常高转换。
平面坐标转换可以利用辽宁省C级网坐标转换成果,七参数法转换得到。
正常高转换是利用大连测区高程控制点拟合的似大地水准面计算得到。
3.4.5 高程数据成果
经过分类和坐标转换后,LIDAR数据就可以用于测绘成果的生产了。
大连1:500地形测量项目主要是获取DEM(Digital Elevation Model,数字高程模型)、等高线、高程注记点等。
由于LIDAR数据的高密度和高精度,使得由分类后的地表点生成的TIN(Triangulated Irregular Network,不规则三角网)的精度较传统数字摄影测量方法有了质的提高,能够满足大比例尺地形测量的需求。
3.4.6 高程精度检测
大连1∶500地形测量高程成果采用实地水准测量和差分GPS测量方法进行检测,检测结果见表1。
其中Δ为检测误差值,M=0.15(m)为标准中误差。
两种检测方法结果表明,大部分成果精度很高,1倍标准中误差以内的检测点数达到85%以上,大于2倍标准中误差的检测点数小于5%,检测中误差小于0.15 m,满足设计书的要求,证明用LIDAR测高获取地形高程的方法可行。
4 结语
从大连市1∶500地形测量项目可以看出,机载LIDAR技术为获取高分辨率的地球空间信息提供了全新的技术手段,使人们从传统的单点数据获取变为连续自动数据获取,提高了观测的精度和速度,能快速的获取精确的数字高程模型及地物的三维坐标,同时配合地物影像,增强对地物的认知和识别能力,在摄影测量与遥感及测绘等领域具有广阔的发展前景和应用需求,因此开展机载LIDAR技术的应用研究以及数据处理的方法研究具有重要的理论价值和现实意义。
参考文献
[1] 舒宁.激光成像[M].武汉大学出版社,2005.
[2] 李英成,文沃根,王伟.快速获取地面三维数据的LIDAR技术系统[J].测绘科学,2002,27(4).
[3] 刘经南,张晓红.激光扫描测高技术的发展与现状[J].武汉大学学报:信息科学版,2003,23(2).。