三维激光扫描系统
- 格式:doc
- 大小:36.50 KB
- 文档页数:3
一、系统简介三维激光扫描技术是上世纪九十年代中期开始出现的一项高新技术,是继GPS空间定位系统之后又一项测绘技术新突破。
它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。
可以快速、大量的采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段。
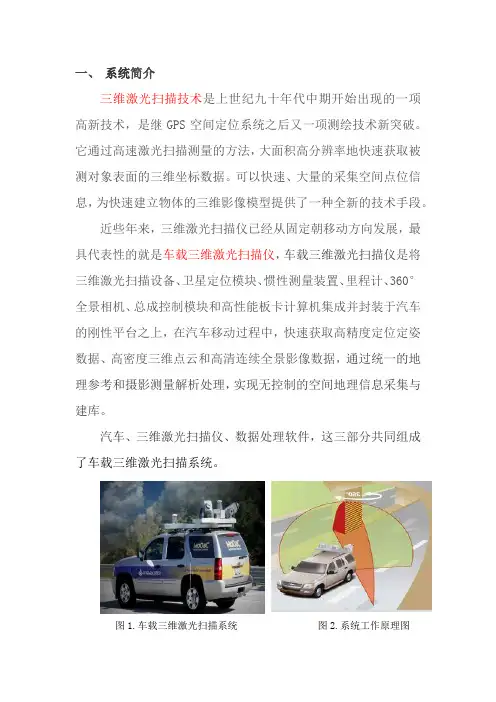
近些年来,三维激光扫描仪已经从固定朝移动方向发展,最具代表性的就是车载三维激光扫描仪,车载三维激光扫描仪是将三维激光扫描设备、卫星定位模块、惯性测量装置、里程计、360°全景相机、总成控制模块和高性能板卡计算机集成并封装于汽车的刚性平台之上,在汽车移动过程中,快速获取高精度定位定姿数据、高密度三维点云和高清连续全景影像数据,通过统一的地理参考和摄影测量解析处理,实现无控制的空间地理信息采集与建库。
汽车、三维激光扫描仪、数据处理软件,这三部分共同组成了车载三维激光扫描系统。
图1.车载三维激光扫描系统图2.系统工作原理图二、发展状况随着地理空间信息服务产业的快速发展,地理空间数据的需求也越来越旺盛。
地理空间数据的生产,成为世界经济增长的一大热点。
目前世界上最大的两家导航数据生产商NavTech和Tele Atlas均将车载三维激光扫描系统作为其数据采集与更新的主要手段,并将该技术视为公司的核心技术。
我国在车载三维激光扫描系统测图领域的研究起步较早,现已在多传感器集成、系统误差检校、直接地理参考技术、交通地理信息系统等方面取得突破性的进展,其中最具代表性的有李德仁院士主持、立得空间信息技术有限公司研制的LD2000-RM车载道路测量系统和刘先林院长主持、首都师范大学研制的SSW车载测图系统。
三、国内的应用经过多年的发展和应用,车载三维激光扫描系统已在我国基础测绘、应急保障测绘、街景导航地图测绘、三维数字城市建设、矿山测绘、公路GIS与公路路产管理、电力GIS数据采集与可视化管理、铁路GIS与铁路资产管理、公安GIS数据采集等项目中得到广泛应用。

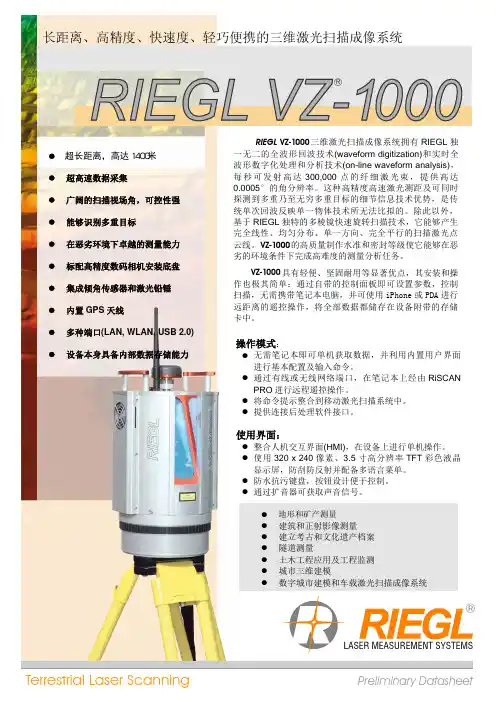
LASER MEASUREMENT SYSTEMS®Preliminary DatasheetRIEGL VZ-1000®三维激光扫描成像系统拥有RIEGL 独一无二的全波形回波技术(waveform digitization)和实时全波形数字化处理和分析技术(on-line waveform analysis),每秒可发射高达300,000点的纤细激光束,提供高达0.0005°的角分辨率。
这种高精度高速激光测距及可同时探测到多重乃至无穷多重目标的细节信息技术优势,是传统单次回波反映单一物体技术所无法比拟的。
除此以外,基于RIEGL 独特的多棱镜快速旋转扫描技术,它能够产生完全线性、均匀分布、单一方向、完全平行的扫描激光点云线。
的高质量制作水准和密封等级使它能够在恶劣的环境条件下完成高难度的测量分析任务。
具有轻便、坚固耐用等显著优点,其安装和操作也极其简单:通过自带的控制面板即可设置参数,控制扫描,无需携带笔记本电脑,并可使用iPhone 或PDA 进行远距离的遥控操作,将全部数据都储存在设备附带的存储卡中。
操作模式:●无需笔记本即可单机获取数据,并利用内置用户界面进行基本配置及输入命令。
●通过有线或无线网络端口,在笔记本上经由RiSCAN PRO 进行远程遥控操作。
●将命令提示整合到移动激光扫描系统中。
●提供连接后处理软件接口。
使用界面:●整合人机交互界面(HMI),在设备上进行单机操作。
●使用320x 240像素、3.5寸高分辨率TFT 彩色液晶显示屏,防刮防反射并配备多语言菜单。
●防水抗污键盘,按钮设计便于控制。
●通过扩音器可获取声音信号。
RIEGL VZ-1000VZ-1000VZ-1000长距离、高精度、快速度、轻巧便携的三维激光扫描成像系统 ●超高速数据采集●广阔的扫描视场角,可控性强●能够识别多重目标●在恶劣环境下卓越的测量能力●标配高精度数码相机安装底盘●集成倾角传感器和激光铅锤●内置GPS 天线●多种端口(LAN,WLAN,USB 2.0)●设备本身具备内部数据存储能力●超长距离,高达1400米●建筑和正射影像测量●建立考古和文化遗产档案●隧道测量●土木工程应用及工程监测●城市三维建模●数字城市建模和车载激光扫描成像系统●地形和矿产测量系统构成软件包用于扫描仪的操作和数据处理数据存档:以目录树结构存储为XML 文件格式核查,智能视图和特征抽取拼接方式:提供包括全球坐标系拼接在内的全自动和半自动四种拼接方式高精度、低畸变的专业单反数码相机(4,256×2,832pixel)(4,288x 2,848pixel) ●自动生成高分辨率的贴图纹理网格●自动生成三维正射影像、数字高程图和等高曲线图●实时定位、距离、面积和体积的测量将扫描仪、软件和数码相机结合,能够实现Ø 200 mm308 m m3Preliminary Datasheet扫描仪通讯和数据接口●LAN 10/100/1000MBit/s 接口位于旋转头里●LAN 10/100MBit/s 接口位于底部●WLAN 接口位于顶部天线处●USB 2.0用于外部驱动存储(闪存●USB 2.0用于连接数码相机●GPS 天线连接器●两个用于额外电源供给的接口●GPS 脉冲同步接口(1PPS 扫描数据存储●内置32G 闪存存储●外部有USB 2.0存储驱动接口(可接/RIEGL VZ -1000®2)Laser PRR (Peak) 70 kHz100 kHz 150 kHz 300 kHz2)Effective Measurement Rate 29 000 meas./sec.42 000 meas./sec.62 000 meas./sec.122 000 meas./sec.3)Max. Measurement Range 4)for natural targets ρ ≥ 90%1200 m 1000 m 800 m 450 m for natural targets ρ ≥ 20%560 m470 m380 m270 m5)Max. Number of Targets per Pulse practically unlimited 6) 8)Accuracy 8 mm 7) 8)Precision 5 mmCLASS 1 LASER PRODUCT1)with online waveform processing4)limited by PRR 2)rounded values, selectable by measurement program 5)details on request3)Typical values for average conditions. Maximum range is 6)Accuracy is the degree of conformity of a measured quantity to its actual (true) value.specified for flat targets with size in excess of the laser7)Precision, also called reproducibility or repeatability, is the degree to beam diameter, perpendicular angle of incidence, and for which further measurements show the same result.atmospheric visibility of 23 km. In bright sunlight, 8)One sigma @ 100 m range under RIEGL test conditions.the max. range is shorter than under an overcast sky.9)0.3 mrad correspond to 30 mm increase of beamwidth per 100 m of range.Minimum Range 1.5 mLaser Wavelength near infrared 9)Beam Divergence 0.3 mrad10) frame scan can be disabled, providing 2D operation11) selectable, minimum stepwidth increasing to 0.004° @ 70 kHz PRRLASER MEASUREMENT SYSTEMS®0100200400500800Target Reflectivity [%]M a x i m u m M e a s u r e m e n t R a n g e [m ]w e t i c e , b l a c k t a r p a p e rd r y s n o wc o n i f e r o u s t r e e sd r y a s p h a l td e c i d u o u s t r e e st e r r a c o t t ac l i f f s , s a nd , m a s o n r yw h i t e p l a s t e r w o r k , l i m e s t o n e30051015202530354045505560657075801400w h i t e m a r b l e9085standard clear atmosphere: visibility 23 km light haze: visibility 8 kmc o n s t r u c t i o n c o n c r e t e9001000110012001300600700150 kHz100 kHz70 kHzrange limited by PRR300 kHz技术参数物理参数激光产品分类一级安全激光制造依照IEC60825-1:2007The following clause applies for instruments delivered into the United States:Complies with 21CFR 1040.10and 1040.11except for deviations pursuant to Laser Notice No.50,dated Jul 26,2001.温度范围:0℃~40℃(使用);-10℃~50℃(存放)保护等级:IP64,防尘,防雨水重量:9.8KG1)Range Performance 100°(+60°~-40°)旋转反射棱镜3线/秒~120线/秒0.0024°≤∆ϑ≤0.288°优于0.0005°(1.8arcsec)内置,专门用于扫描仪垂直位置的变化定位实时同步扫描数据的采集时间控制扫描仪同步旋转0°~360°旋转激光头0°/秒~60°/秒0.0024°≤∆φ≤0.5°优于0.0005°(1.8arcsec)扫描角度范围扫描机制原理扫描速度角度步频率∆ϑ(垂直),∆φ(水平)角度分辨率倾角传感器:内置同步计时器:同步扫描(可选):11)11)10)假设具备以下条件:平面目标大于激光光束;入射角垂直于目标且亮度平均。
三维激光扫描系统技术参数一.仪器精度:(1)点位精度:3 mm @ 50 m; 6 mm @ 100 m(2)距离精度:1.2 mm + 10 ppm(3)角度精度:8" / 8"(垂直/水平)(4)标靶获取精度:2 mm @ 50 m(5)双轴补偿器:实时机载液态传感器形式的双轴补偿,可选开/关,分辨率1’,补偿范围+/- 5’,补偿精度1.5"二.激光扫描:(6)激光类型:脉冲式,超高速WFD(波形数字化)增强技术,颜色及波长:1550 nm (不可见的) /658 nm (可见的),激光等级1级(符合IEC60825:2014标准)(7)扫描距离,范围:最小距离0.4 m最大范围270 m(34 %反射率),范围噪音*0.4 mm rms @ 10 m,0.5 mm rms @ 50 m(8)扫描速率:1000000点/秒(9)激光光斑大小:前窗激光光斑直径≤3.5mm(10)数据储存容量:256 GB内置固态硬盘(SSD)或外接USB设备(11)数据传输:千兆以太网,集成WLAN USB 2.0设备(12)机载界面显示:触摸屏(触笔)控制,真彩色VGA图形显示(640 x 480像素)(13)激光对中器:激光安全等级:1级(IEC 60825:2014)对中精度:1.5 mm @ 1.5 m 激光光斑直径:2.5 mm @ 1.5 m可打开/关闭(14)激光发散角:<0.23mrad(15)视场角:水平:360°(max)垂直:270°(max)照准:无视差,可变焦(16)仪器可同时使用两块内置锂电池和一块外挂锂电池,支持热交换2块内电池内置电池> 5.5小时(2块电池)外挂电池> 7.5小时(常温下)以便适应长时间野外作业;外接电源:24 V直流电或100 - 240 V交流电,典型40w功耗;。
基于控制器的高速三维激光扫描系统设计与实现随着科技的不断发展,激光技术的应用越来越广泛,如在仓储、制造、医疗等行业都有着重要的作用。
其中,三维激光扫描系统可以快速地获取三维模型,广泛应用于制造业、文化遗产保护、室内设计等领域。
本文将介绍一种基于控制器的高速三维激光扫描系统设计与实现。
一、系统架构系统架构主要由三部分组成:控制器、激光扫描头和制动器。
其中,控制器作为整个系统的核心,主要负责数据处理、控制和传输等任务。
激光扫描头则用于发射激光束并接收反射回来的激光信号。
制动器则起到激光扫描头的定位作用,以确保扫描的精度和精度。
二、系统设计本系统采用的激光扫描头为TOF(Time-of-Flight)类型激光扫描头,其工作原理是计算反射回来的激光信号的往返时间,并通过ToF芯片进行数据转换,从而得到距离信息。
同时,由于ToF激光扫描头的工作频率高,能量密度大,因此可以实现高速扫描。
另外,为了确保扫描的精确性,本系统采用了高精度制动器来控制激光扫描头的运动轨迹。
在控制器的设计方面,本系统选择了基于FPGA(Field-Programmable Gate Array)芯片的控制器,该芯片具有可重构性、并行性、低功耗等特点,适用于高速数据处理和控制。
控制器的软件部分则主要由C语言和Verilog HDL编写而成。
三、系统实现系统实现的关键在于算法的设计和实现。
本系统采用了基于去噪和网格化的数据处理算法,通过滤波、积分、分割、匹配等步骤将原始扫描数据进行处理,最终得到三维点云数据。
算法实现过程中主要采用了C++编程语言。
同时,为了实现高速扫描,本系统采用了基于DSP芯片的数据传输方式,用于实现控制器和激光扫描头之间的快速数据传输。
同时,为了实现较长距离的扫描,本系统还采用了多台激光扫描头的联合扫描方式,以减小扫描盲区和遮挡等现象。
四、系统优化在系统优化方面,本文主要着重从三个方面进行了优化:数据采集、数据处理和数据显示。

三维激光扫描仪汇总三维激光扫描仪,也被称为三维激光扫描系统,是一种能够捕捉并测量物体表面形状和对象几何特征的高精度测量仪器。
它通过使用激光束来扫描物体,并通过分析激光点云数据来生成三维模型。
三维激光扫描仪广泛应用于工业制造、建筑设计、文化遗产保护、地质测量、医学等领域。
下面将对三维激光扫描仪的原理、类型和应用进行详细介绍。
一、原理三维激光扫描仪的原理基于激光测距技术。
它通常通过发射激光束并测量激光束返回的时间来计算物体表面的距离。
激光束由发射器产生并聚焦到一个点,然后被反射回扫描仪接收器。
接收器测量激光束返回的时间,并根据时间和光速的关系计算出物体表面的距离。
通过在多个角度对物体进行扫描,可以得到物体的各个点的三维坐标数据,从而构建一个完整的三维模型。
二、类型根据扫描技术的不同,三维激光扫描仪可以分为接触式扫描仪和非接触式扫描仪。
接触式扫描仪需要物体与扫描仪直接接触,以便获取物体表面的数据。
这种扫描仪通常使用机械臂来控制激光头的运动。
非接触式扫描仪则不需要物体接触,通过激光束直接扫描物体表面。
这种扫描仪可以分为两类:光干涉式扫描仪和光视差式扫描仪。
光干涉式扫描仪使用干涉原理来测量物体表面的形状,它可以达到非常高的测量精度。
光视差式扫描仪则通过比较激光束在不同位置的视差来推断物体表面的形状。
三、应用三维激光扫描仪在各个领域都有广泛的应用。
在工业制造中,它可以用来对产品进行质量控制和尺寸测量。
例如,在汽车制造中,三维激光扫描仪可以用来检测车身的平整度和尺寸偏差。
在建筑设计和土木工程中,三维激光扫描仪可以用来对建筑物进行测量和建模。
它还可以用来进行建筑物的实时监测和变形分析。
在文化遗产保护方面,三维激光扫描仪可以用来对古建筑、雕塑和艺术品进行数字化保护。
在地质测量中,它可以用来获取地表的几何信息和地貌变化。
在医学方面,三维激光扫描仪可以用来进行面部重建和医疗器械的量身定制。
总结起来,三维激光扫描仪是一种非常重要的测量仪器,它可以帮助我们捕捉和测量物体表面的形状和几何特征。
0.引言自上世纪六十年代第一台激光测距仪研制成功,三维激光扫描技术是上世纪九十年代中期激光应用研究的又一项重大突破,它通过高速激光扫描测量,大面积、高分辨率获取被测对象表面的三维坐标数据,可以快速、大量的采集空间点位信息,为快速获取空间物体的三维数据信息提供了一种全新的技术手段。
根据权威专家预测,该项技术是即GPS技术后的又一项测绘技术新突破,其应用推广将会引起测绘技术的又一次革命。
1.三维激光扫描技术工作原理扫描仪的发射器通过激光二极管发射近似红外波长的安全激光束,对所测对象进行立体面状扫描,借助设备获取不同对象对激光的反射时间差,从而测出激光与物体之间的距离,最后用编码器来测量镜头旋转角度与激光扫描仪的水平旋转角度,获取被测对象表面每个采样点空间立体坐标,得到被测对象的采样点(离散点)集合,称之为“距离影像”或“点云”。
所获取的由点云组成的影像与通常的扫描的栅格影像最大的区别就是具有矢量化的特性,点云之间具有可量测性。
2.设备分类按照空间位置分类,三维激光扫描设备可分为:1:机载类;2:地面类。
地面扫描设备按照扫描方式的区别细分为地面、车载和船载;以OPTECH公司的三维激光扫描仪为例,地面类按照其功能分为ILRIS—36D、ILRIS—3DER、ILRIS—3DMC、ILRIS—3DVP四种型号。
ILRIS—36D配备有一个马达驱动可旋转和仰俯机座,提供3600的视场,可无缝扫描大面积的区域;ILRIS—3DER距离增强型,使可视能力增加40%;ILRIS—3DMC适合于车载和船载进行移动扫描;ILRIS—3DVP是基本型。
3.设备性能参数以徕卡HDS6000、TrimbleGX3D、ILRIS-3D三种扫描仪为例进行性能参数比较:①徕卡HDS6000扫描仪:扫描距离79m,速度500000/秒,单点测量精度3mm,距离精度0.1mm,标靶获取精度2mm,角度25”。
②TrimbleGX3D扫描仪:扫描距离200m,加长350m,速度5000/秒,单点测量精度12mm@100m,距离精度7mm@100m,标靶获取精度小于1mm,角度(水平角12”;垂直角14”)。
移动式三维激光扫描原理
移动式三维激光扫描是一种用于获取物体表面三维几何信息的技术,其工作原理如下:
1.激光发射:移动式三维激光扫描系统会通过激光发射器发射一束激光束。
这束激光束具有特定的波长和功率。
2.激光照射:激光束照射到待扫描的物体表面上。
当激光束照射到物体表面时,会与物体表面交互作用。
3.光反射:激光束照射到物体表面后,一部分激光会被物体表面反射回来。
4.接收器接收:移动式三维激光扫描系统中的接收器会接收到被物体表面反射回来的激光。
5.时间测量:接收到反射回来的激光后,系统会通过测量激光的飞行时间来计算从激光发射到激光接收的时间差。
这个时间差与激光在空间中的传播距离有关。
6.距离计算:通过已知激光的速度(光速)和测量的时间差,系统可以计算出激光从发射器到物体表面的距离。
7.扫描:移动式三维激光扫描系统会通过改变激光的发射方向或扫描设备的位置,对物体表面进行多个点的扫描。
每个扫描点都会测量对应的距离。
8.数据处理:系统将测量到的距离数据与扫描点的位置信息结合起来,生成三维点云数据。
这些点云数据可以用于重建物体表面的三维模型。
总结来说,移动式三维激光扫描通过发射激光、测量激光的飞行时间和计算距离,对待扫描物体表面进行多点扫描,最终生成物体的三维几何信息。
这种扫描技术广泛应用于建筑、制造、文化遗产保护等领域。
徕卡三维激光扫描系统介绍
徕卡三维激光扫描系统是一种高精度的测量仪器,能够通过光学扫描技术获取目标物体的三维表面形状数据。
徕卡作为一家享有盛誉的德国光学公司,凭借多年的光学技术积累和创新能力,开发出了此项先进的三维激光扫描系统。
徕卡三维激光扫描系统的核心技术是激光测距,利用光的传播速度和反射原理,通过测量激光从仪器发射到物体表面并返回的时间,计算出物体各个点的距离。
通过不断旋转激光扫描仪,可以扫描整个目标物体的表面,从而实现对物体的全局三维测量。
与传统的测量方法相比,徕卡三维激光扫描系统具有以下几个显著优点:
第一,高精度。
徕卡三维激光扫描系统采用先进的光学技术,能够实现亚毫米级的测量精度。
它可以快速准确地捕捉到物体表面的细微特征,并生成高精度的三维模型。
这对于需要高精度测量的领域,如工业制造、产品设计等具有重要意义。
第二,高效率。
徕卡三维激光扫描系统具备高速扫描功能,能够在短时间内完成对大型物体的全方位扫描。
与传统的测量方法相比,它不需要进行物体的接触式测量,大大节省了测量时间,并提高了工作效率。
第四,广泛应用。
徕卡三维激光扫描系统在工业制造、文物保护、土地测量、医疗等多个领域都有广泛的应用。
例如,在工业制造中,它可以用于产品质量检测、模具设计等方面;在文物保护中,它可以用于文物的数字化保护和修复;在医疗领域中,它可以用于矫形手术的设计和制造等方面。
总之,徕卡三维激光扫描系统是一种具有高精度、高效率、多功能的先进测量仪器。
它以其卓越的性能和广泛的应用前景,为各个领域的用户提供了强有力的测量解决方案,并促进了相关行业的发展和创新。
三维扫描系统什么是三维扫描系统?三维(3D)扫描系统是一种将实物对象数字化并生成三维模型的设备或工具。
它可以快速、精确地获取物体的形状、大小、纹理等信息,从而原始数据可以被导入计算机或其他设备进行后续处理。
三维扫描技术因其高效性、精度和灵活性等特点,被广泛应用于制造业、建筑业、文化遗产及医疗等领域。
三维扫描系统已成为许多行业的利器,它为数字化制造提供了支持,拓展了可视化技术的应用范围。
三维扫描系统的分类三维扫描系统可以根据激光扫描、结构光扫描、相位移测量和立体匹配等原理进行分类。
•激光扫描:激光扫描系统通过激光束直接扫描目标对象表面,得到密集的点云数据,进而生成三维模型,适用于聚焦于目标地形或结构内部形态的高精度数据获取。
•结构光扫描:结构光扫描系统依旧通过构建目标表面的点云信息,但是不是通过激光扫描,而是通过LED灯光的辅助,将图案投影在目标表面上,从而采集目标区域的形状等样本数据,适用于人体扫描和半透明或反光物体的数据采集等应用。
•相位移测量:此类扫描系统依赖于激光或光栅来测量表面形变或物体内部结构的位移变化,量测的两个或多个不同状态下的信号相差就是物体的形变量。
•立体匹配:对于需要移动扫描,但同时要求点云相对于彼此分类组合的场景,多个机器的同步操作是必须的。
直接拍摄或扫描一组图像,用三角测量或立体匹配算法计算相邻像素的深度。
比如,在建筑业中,立体匹配更多地应用于拓扑测量、计算结构物表面形态、模拟之前或之后的工程改进方案等。
每种三维扫描系统都有其优点和局限性,因此应根据不同的应用场景选择不同的系统。
三维扫描系统的应用三维扫描系统已经应用于许多领域:制造行业制造领域中,三维扫描技术可以用于检查和量化零件和装配件。
它可以制作数字模型化的样品和零件库,可以用于进行拓扑优化、逆向工程、快速原型设计、挑战零件可制造性等。
建筑业建筑行业中,三维扫描技术和BIM系统相结合,可以用于建造和修复大型结构,例如桥梁、高速公路、码头和其他大型建筑等的设计,维护,改进和检查,同时能充分进行施工设计,使施工更加安全、可持续和经济。
三维激光扫描原理一、引言三维激光扫描是一种获取现实世界物体几何形状和表面细节的技术。
它通过使用激光束扫描物体表面,并测量激光束的返回时间来获取物体的三维坐标信息。
本文将介绍三维激光扫描的原理及其应用。
二、三维激光扫描原理三维激光扫描系统主要由激光发射器、接收器、控制电路和计算机等组成。
其工作原理如下:1. 激光发射:激光发射器产生一束高能激光束,并通过光学系统将其聚焦成一个小点。
激光的波长通常为可见光范围内的红外线,如常用的波长为780nm的激光。
2. 激光照射:激光束被照射到待测物体的表面上。
由于激光束的能量非常高,它会被物体吸收或反射。
在反射过程中,激光束与物体表面发生散射。
3. 激光接收:激光束的一部分被物体表面反射回来,并被接收器接收。
接收器通过探测光电效应将光信号转换为电信号。
4. 三角测量:通过测量激光束的返回时间,可以计算出激光束从发射到接收的时间差。
结合激光的速度,可以得到激光束与物体表面的距离。
通过多次扫描,可以获取物体不同位置的距离信息。
5. 坐标计算:通过将激光束的距离信息与扫描系统的位置信息结合起来,可以计算出物体表面的三维坐标。
将所有的扫描点的坐标连接起来,就可以得到物体的三维模型。
三、三维激光扫描的应用三维激光扫描技术在许多领域中得到广泛应用,以下是其中的几个例子:1. 工业制造:三维激光扫描可以用于检测产品的几何形状和尺寸,以确保产品质量。
它还可以用于逆向工程,通过扫描实物物体来生成其三维模型,以便进行产品设计和改进。
2. 文化遗产保护:三维激光扫描可以用于对文化遗产进行数字化保护。
通过对古建筑、雕塑等进行扫描,可以创建其精确的三维模型,以便进行修复和保存。
3. 地形测量:三维激光扫描可以用于测量地表的形状和高程。
通过飞行器搭载激光扫描仪,可以对大规模地区进行高精度的地形测量,用于地理信息系统和城市规划。
4. 医学应用:三维激光扫描可以用于医学影像学中的三维重建。
通过对患者身体或器官进行扫描,可以生成其精确的三维模型,用于手术规划和医疗诊断。
目前应用的三维激光扫描系统种类繁多,类型、工作领域不尽相同。
按照不同研究角度、工作原理可进行多种分类。
三维激光扫描系统从操作的空间位置可以划分为如下四类:机载型激光扫描系统这类系统在无人机或有人直升机上搭载,由激光扫描仪、成像装置、定位系统、飞行惯导系统、计算机及数据采集器、记录器、处理软件和电源构成,它可以在很短时间内取得大范围的三维地物数据。
地面型激光扫描系统此种系统是一种利用激光脉冲对被测物体进行扫描,可以大面积、快速度、高精度、大密度的取得地物的三维形态及坐标的一种测量设备。
根据测量方式还可划分为两类:一类是移动式激光扫描系统;一类是固定式激光扫描系统。
所谓移动式激光扫描系统,是基于车载平台,由全球定位系统、惯性导航系统结合地面三维激光扫描系统组成。
固定式的激光扫描系统,类似传统测量中的全站仪。
系统由激光扫描仪及控制系统、内置数码相机、后期处理软件等组成。
与全站仪不同之处在于固定式激光扫描仪采集的不是离散的单点三维坐标,而是一系列的“点云”数据。
其特点为扫描范围大、速度快、精度高、具有良好的野外操作性能。
手持型激光扫描仪此类设备多用于采集小型物体的三维数据,一般配以柔性机械臂使用。
优点是快速、简洁、精确。
适用于机械制造与开发、产品误差检测、影视动画制作与医学等众多领域。
特殊场合应用的激光扫描仪如洞穴中应用的激光扫描仪在特定非常危险或难以到达的环境中,如地下矿山隧道、溶洞洞穴、人工开凿的隧道等狭小、细长型空间范围内,三维激光扫描技术亦可以进行三维扫描。
三维激光扫描系统按照扫描仪的测距原理,又划分为如下三类:(1)使用脉冲测距技术。
其测距范围可达数百米,甚至上千米。
(2)基于相位测量原理。
主要用来进行中等距离的扫描测量,其扫描范围一般在百米内,与采用脉冲测距原理的扫描设备相比,它的精度相对为高。
(3)基于光学的三角测量原理。
采用光学三角测量原理的扫描设备,一般工作距离较近,在数米或数十米之内,主要应用于工程测量及逆向建模等工程中,可以达到很高的测量精度。
三维激光扫描仪原理
三维激光扫描仪是一种能够快速获取物体表面三维形状信息的高精度测量设备。
它通过激光束在物体表面的反射和回波信号的接收,实现对物体表面的高精度扫描和测量。
三维激光扫描仪的工作原理是基于激光测距技术和三角测量原理,通过激光束的发射和接收,计算出物体表面各点的三维坐标信息,从而实现对物体表面的快速、精确的三维测量。
首先,三维激光扫描仪通过发射激光束照射到物体表面,激光束在物体表面被
反射后,激光束的回波信号被接收器接收到。
接收器接收到回波信号后,根据激光束的发射和接收时间,计算出激光束从发射到接收的时间差,再根据光速和时间差计算出激光束在空间中的传播距离。
其次,三维激光扫描仪通过三角测量原理计算出物体表面各点的三维坐标信息。
三角测量原理是利用已知的一条边和两个角或者两条边和一个角来确定一个三角形的大小和形状。
在三维激光扫描仪中,激光束的发射点、接收点和物体表面上的点构成一个三角形,通过测量激光束的发射点和接收点的坐标,以及激光束在空间中的传播距离,就可以计算出物体表面上各点的三维坐标信息。
最后,三维激光扫描仪通过对物体表面上各点的三维坐标信息进行采集和处理,生成物体的三维模型。
在采集和处理过程中,需要考虑到激光束的发射和接收精度、扫描速度、采样密度等因素,以确保生成的三维模型具有高精度和高质量。
总的来说,三维激光扫描仪的工作原理是基于激光测距技术和三角测量原理,
通过激光束的发射和接收,计算出物体表面各点的三维坐标信息,从而实现对物体表面的快速、精确的三维测量。
三维激光扫描仪在工业制造、建筑测量、文物保护、数字化设计等领域有着广泛的应用前景,是一种非常重要的测量设备。
三维激光扫描系统
1.概述
三维光纤激光切割机是由专用光纤激光切割头、高精度电容式跟踪系统、光纤激光器以及工业机器人系统组成,对不同厚度的金属板材进行多角度、多方位柔性切割的先进设备。
三维机器人激光切割机设备广泛应用于金属加工、机械制造及汽车零部件制造等对3D工件有加工需求的生产中。
2.三维光纤激光切割机器人
(1)三维激光切割原理激光通过激光器产生后,由反射镜传递并通过聚集镜照射到加工物品上,使加工物品(表面)受到强大的热能而温度急剧增加,使该点因高温而迅速的熔化或者汽化,配合激光头的运行轨迹从而达到加工目的。
(2)光纤的选择根据金属板材的厚度不同,选用不同的光纤激光器功率,三维切割光纤激光器的功率一般分200W、300W、400W、500W与1000W等多种规格;对不同功率的激光器配备不同的冷却系统,以保障激光器的正常工作。
同时要根据机械臂的工作半径和加工工件的大小选定合适长度的操作光纤传输激光,以满足客户切割要求。
(3)辅助气体的要求三维光纤激光切割机采用的辅助气体是99.99%的氧气,这样对切割的精度、速度和切割的断面效果有很大的帮助。
耗电耗材:
系统耗电:<8KW(根据选配激光器功率大小而异)
零星耗材:<0.5元/小时(包括高功率激光器水冷系统的滤芯、切割头气嘴和切割头保护镜片)
吹气费用:<6元/小时(以用纯氧辅助切割2MM内碳钢为例)
性能指标:
激光功率:200W/300W/400W/500W/1000(根据工件材质和料厚可选)
激光波长:1070NM
工作区域:半径2米的半球形工作区域(选配半径2米的机械手)
切割速度:0-15米/分钟(根据功率大小和工件材质与厚度可调)
供电电源:三相交流380V
用电功率: <8KW(根据选配激光器功率大小而定)
冷却方式:风冷/水冷(根据选配激光器功率大小而定)
切割头焦距:5-7英寸(根据工件厚度可选)
机械手重复定位精度:±0.1MM
机械手保护等级:IP65
系统使用寿命:十万小时
系统保修:2年
系统选型:
1. 根据工件大小选配不同臂长的机械手。
在置顶安装的情况下,机械手为半球面的工作区域,考虑到用户的实际加工情况和后期产品升级空间,建议采用臂长
2.01米的机械手,可达直径3米的半球形加工区域。
2. 根据工件材质和厚薄选配不同功率级别的光纤激光器。
金属的切割以碳钢、铝和不锈钢三种为代表,铝等为高反射材料,同样料厚情况下需选配更大功率的激光器,碳钢比较容易切割,典型参数为2MM内厚碳钢选用200W激光器。
具体选型可接洽我公司工艺工程师。
3. 根据工件厚薄选配不同焦距的切割头,有3、5、7英寸可供选配。
6mm以下薄板切割可选5英寸的中焦距切割头,6mm 以上中厚板切割一般选用7英寸的长焦距切割头。
4. 根据实际需要选配离线编程软件。
采用用工业机器人代替五轴机床。
工业机器人的重复定位精度比五轴机床稍低,约为±100uM,但完全满足汽车钣金覆盖件和底盘件行业的精度要求。
而采用工业机器人大大降低了系统的成本造价,减少了耗电系统费用和系统运行维护费用以及系统的占地面积。
产品结合汽车钣金覆盖件和底盘件的行业特点,采用工业机器人+光纤激光器的组合进行三维切割,耗材耗电总费用控制在每小时20元内。
用光纤激光器代替CO2激光器。
光纤激光技术是近几年高速发展的激光技术,相比传统激光,具有更好的切割质量,更低的系统造价,更长的使用寿命和更低的维护费用,更低的耗电。
光纤激光器的激光可以通过光纤传输,方便与工业机器连接,实现柔性加工。