控制系统工程设计第2章
- 格式:pptx
- 大小:1.78 MB
- 文档页数:72
第二章 参考答案2-1 (1) 不是 (2) 是 (3) 不是 (4) 不是 2-2 (a))()()(3)(2222t u t u dtt du RC dt t u d C R i o o o =++ (b) )()()()()()()()(2211222121222111222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (c ) )()()()()()(33221312221t u R dtt du C R R t u R R dt t du C R R R R R i i o o +=++++(d))()()()()()()()(1211222121211211222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (e))()()()()()()()(221222121211222222121t u dtt du R C C dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (f) )()()()()()()(22121221t u R dtt du L t u R R dt t du L C R R dt t u d CL R i i oo o +=++++ 2-3 (a) )]()([)()()(23213121t u R dtt du C R R t u R dt t du C R R R R i i o o +=++-(b) )()()()(4141232022213210t u R R t u R R dt t du C R R R dt t u d C C R R R R i o o o -=++ (c))]()()([)(32321t u R R dtt du C R R t u R i i o ++=-(d) )()()()()(221122212121t u dt t du C R C R dt t u d C C R R dt t du C R i i i o +++=- (e) )()()()(2412222142t u dtt du C R C R dt t u d C C R R o o o +++ )}()(])([)({21213224223221432132t u dtt du R R C C R R C R dt t u d R R C C R R R R R R i i i +++++++=- 2-4 (a) dt t dx f dt t dx f f dt t x d m i o o )()()()(12122=++ (b) dt t dx f k t x k k dt t dx f k k i o o )()()()(12121=++ (c) )()()()()(121t x k dt t dx f t x k k dt t dx f i i o o +=++ (d) )()()()()()(112121t x k dtt dx f t x k k dt t dx f f i i o o +=+++2-5 (a))(1)()()()(1)()()(2112212221211*********t u C C dt t du C R C R dt t u d R R t u C C dt t du C R C R C R dt t u d R R i i i o o o +++=++++ (b))()()()()()()()(2112212221211211212221t x k k dtt dx k f k f dt t x d f f t x k k dt t dx k f k f k f dt t x d f f i i i o o o +++=++++ 由(a)(b)两式可以看出两系统具有相同形式的微分方程,所以(a)和(b)是相似系统。
第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
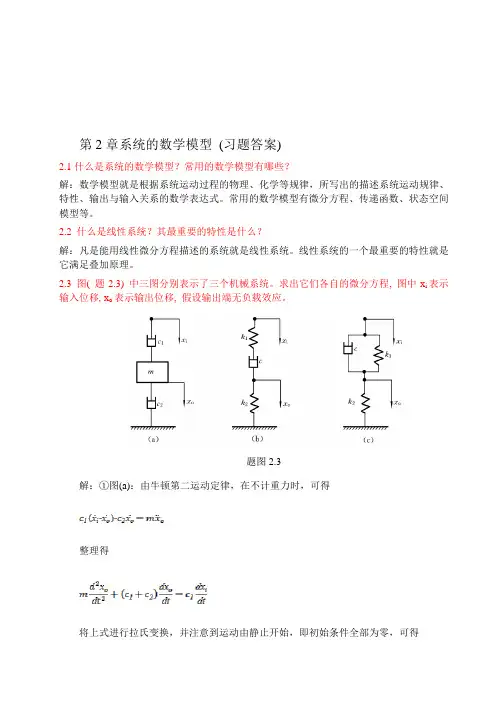
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-C)(t u r )(t u c )(t r )(t x c f1k 2k CR)(t u r )(u c +-+-f)(t r )(t x c )(a )(b )(c )(d R 2R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
机械控制⼯程基础第⼆章系统的数学模型基本要求、重点和难点⼀、基本要求(1)了解数学模型的基本概念。
能够运⽤动⼒学、电学及专业知识,列写机械系统、电⼦⽹络的微分⽅程。
(2)掌握传递函数的概念、特点,会求传递函数的零点、极点及放⼤系数。
(3)能够⽤分析法求系统的传递函数。
(4)掌握各个典型环节的特点,传递函数的基本形式及相关参数的物理意义。
(5)了解传递函数⽅框图的组成及意义;能够根据系统微分⽅程,绘制系统传递函数⽅框图,并实现简化,从⽽求出系统传递函数。
(6)掌握闭环系统中前向通道传递函数、开环传递函数、闭环传递函数的定义及求法。
掌握⼲扰作⽤下,系统的输出及传递函数的求法和特点。
(7)了解相似原理的概念。
(8)了解系统的状态空间表⽰法,了解MATLAB中,数学模型的⼏种表⽰法。
⼆、本章重点(1)系统微分⽅程的列写。
(2)传递函数的概念、特点及求法;典型环节的传递函数。
(3)传递函数⽅框图的绘制及简化。
三、本章难点(1)系统微分⽅程的列写。
(2)传递函数⽅框图的绘制及简化。
概述系统按其微分⽅程是否线性这⼀特性,可以分为线性系统和⾮线性系统。
如果系统的运动状态能⽤线性微分⽅程表⽰,则此系统为线性系统。
线性系统的⼀个最重要的特性就是满⾜叠加原理。
线性系统⼜可分为线性定常系统和线性时变系统。
系统的数学模型是系统动态特性的数学描述。
对于同⼀系统,数学模型可以有多种形式,如微分⽅程、传递函数、单位脉冲响应函数及频率特性等等。
但系统是否线性这⼀特性,不会随模型形式的不同⽽改变。
线性与⾮线性是系统的固有特性,完全由系统的结构与参数确定。
系统建模是经典控制理论和现代控制理论的基础。
建⽴系统数学模型的⽅法有分析法和实验辨识法两种。
前者主要⽤于对系统结构及参数的认识都⽐较清楚的简单系统,⽽后者通常⽤于对系统结构和参数有所了解,⽽需进⼀步精化系统模型的情况。
对于复杂系统的建模往往是⼀个分析法与实验辨识法相结合的多次反复的过程。
第二章控制系统的数学基础和数学模型基本要求1.掌握拉氏变换、拉氏反变换的定义、定理。
2.了解数学模型的基本概念。
能够运用动力学、电学及专业知识,列写机械系统、电网络系统的微分方程。
3.掌握传递函数的概念、特点,会求传递函数的零、极点。
4.掌握各个典型环节的特点,传递函数的基本形式及相关参数的物理意义。
5.掌握闭环系统中前向通道传递函数、开环传递函数、闭环传递函数的定义及求法。
掌握干扰作用下,系统传递函数的求法和特点。
6.了解传递函数框图的组成及意义;能够根据系统的微分方程,绘制系统传递函数框图,并实现简化,从而求出系统的传递函数。
7.了解相似原理的概念。
本章重点1.拉氏变换定理。
2.列写系统的微分方程。
3.传递函数的概念、特点及求法。
4.典型环节的传递函数。
5.系统的方框图及其化简。
本章难点1.列写系统微分方程。
2.系统的方框图及其化简。
∞ 2.1 拉普拉斯(L a p l a c e )变换2.1.1 拉氏变换概述1.拉氏变换的定义F (s ) = L [ f (t )] = ⎰0f (t )e -std tf (t ):原函数(实域、时间域) F (s ):象函数(s 域、复数域) s :复变量,s=σ+j ωe - st: 拉氏算子j ω[s]σδ ( t )e -atsin ωtcos ωt2.基本函数的拉氏变换1tkttttu ( t ) r ( t )x i ( t ) k 序号原函数 f (t ) 象函数F (s )1 单位脉冲函数 δ (t ) 12单位阶跃函数 1(t ) 1 s 3 K常数k s4t 单位斜坡函数1 s2 5 tnn ! s n +16 e- at1 s + a7sin ωtω s 2 + ω 28cos ωts s 2 + ω 22.1.2 拉氏变换的主要性质1.线性性质设L [f 1(t )]=F 1(s ),L [f 2(t )]=F 2(s ),k 1,k 2为常数 ,则L [k 1 f 1 (t ) + k 2 f 2 (t )] = k 1L [ f 1 (t )] + k 2 L [ f 2 (t )]= k 1F 1 (s ) + k 2 F 2 (s )2.微分性质若L [f (t )]=F (s ),且f (0)=0,(初始条件为零)则L [ df (t )] =sF (s ) dt3.积分定理若L[f(t)]=F(s),且初始条件为零,则L[⎰ f (t )dt ]= 1 F (s)s4.平移定理若L[[f(t)]=F(s),]则L ⎰e-a t f (t)dt =F (s +a)5.初值定理若L[f(t)]=F(s),则f (0+) = limt →0 f (t) = lim s ⋅F (s)s→∞∞6.终值定理若L [f (t )]=F (s ),则有f (∞) = lim t →∞f (t ) = lim s ⋅ F (s )s →07.延迟定理若L [f (t )]=F (s ),对任一正实数a ,则有L [ f (t - a )]= ⎰0f (t - a )e -st d t = e -as F (s )2.1.2 拉氏变换的主要性质1.线性性质设L [f 1(t )]=F 1(s ),L [f 2(t )]=F 2(s ),k 1,k 2为常数 ,则L [k 1 f 1 (t ) + k 2 f 2 (t )] = k 1L [ f 1 (t )] + k 2 L [ f 2 (t )]= k 1F 1 (s ) + k 2 F 2 (s )2.微分性质若L [f (t )]=F (s ),且f (0)=0,(初始条件为零)则L [ df (t )] =sF (s ) dt3.积分定理若L[f(t)]=F(s),且初始条件为零,则L[⎰ f (t )dt ]= 1 F (s)s4.平移定理若L[[f(t)]=F(s),]则L ⎰e-a t f (t)dt =F (s +a)5.初值定理若L[f(t)]=F(s),则f (0+) = limt →0 f (t) = lim s ⋅F (s)s→∞∞6.终值定理若L [f (t )]=F (s ),则有f (∞) = lim t →∞f (t ) = lim s ⋅ F (s )s →07.延迟定理若L [f (t )]=F (s ),对任一正实数a ,则有L [ f (t - a )]= ⎰0f (t - a )e -st d t = e -as F (s )2.1.3拉氏反变换定义:f(t)=L-1[F(s)],将象函数变换成原函数s:复变量F(s):象函数(s 域、复数域)f(t):原函数(实域、时间域)2.2系统的数学模型数学模型就是描述系统的输出、输入与系统本身结构与参数之间的数学表达式。