用矩阵方法设计变焦镜头
- 格式:pdf
- 大小:210.82 KB
- 文档页数:4
变焦镜头内参标定什么是变焦镜头内参标定?变焦镜头内参标定是指通过给定的标定图像,通过计算变焦镜头的内参矩阵,来对镜头进行内部参数标定的过程。
镜头的内部参数包括焦距、主点、径向畸变系数等。
通过完成这个过程,我们可以获得一个准确的相机模型,从而在计算机视觉和机器人技术中得到更精确的结果。
为什么需要进行变焦镜头内参标定?在使用变焦镜头时,无法准确地确定焦距以及径向畸变系数等内参信息,这会导致图像的失真和测量结果的不准确性。
因此,进行变焦镜头内参标定是非常重要的,它可以确保图像的质量和测量的准确性。
下面我们来一步一步回答关于变焦镜头内参标定的过程。
第一步:准备标定板在进行变焦镜头内参标定的过程中,我们需要准备一个标定板。
这个标定板通常是一个黑白的校准板,上面有一些特定的标记物(如棋盘格、圆形等),可以用来识别和测量。
这个标定板需要在不同的位置和角度上拍摄,以获得更丰富的信息。
第二步:拍摄标定图像接下来,我们需要使用相机来拍摄一系列的标定图像。
这些图像需要在不同的焦距下进行拍摄,以便我们可以获得准确的内参信息。
同时,我们还需要在不同的角度和位置上拍摄标定板,以获得更全面的数据。
第三步:提取角点信息在获得标定图像后,我们需要使用计算机视觉的方法来提取标定板上的角点信息。
这些角点可以是标定板上的特定标记物(如棋盘格的角点),或者是其他可以识别和测量的标记物。
我们需要确保提取的角点是准确的和可靠的,以保证标定的精度。
第四步:计算相机的内部参数通过使用一种称为“相机标定”的数学模型,我们可以根据角点的信息计算出相机的内部参数。
这些参数包括焦距、主点、径向畸变系数等。
相机标定模型通常是一个优化问题,需要通过最小化相机模型和实际观测值之间的差异来解决。
这通常涉及到使用优化算法来找到最佳的内部参数。
第五步:验证标定结果在完成相机内部参数的计算后,我们需要对标定结果进行验证。
这可以通过使用标定图像和其他测量工具来实现。
我们可以使用标定图像来重新投影标定板上的点,并与实际观测到的点进行比较。
相机变换矩阵和畸变矫正
首先,让我们来谈谈相机变换矩阵。
相机变换矩阵通常用于将三维世界中的点映射到二维图像平面上,这个过程也被称为投影。
相机变换矩阵通常由内参矩阵和外参矩阵组成。
内参矩阵描述了相机的内部参数,比如焦距、主点坐标和像素大小等;外参矩阵描述了相机的外部参数,包括相机的位置和朝向。
通过相机变换矩阵,我们可以将三维世界中的点坐标映射到二维图像坐标系中。
接下来是畸变矫正。
由于相机镜头的制造和安装等因素,图像中的物体可能会出现畸变,主要包括径向畸变和切向畸变。
径向畸变是由于镜头形状不完美引起的,使得图像中心的物体比边缘的物体更大或更小;切向畸变则是由于镜头安装不平行引起的,使得物体在图像中出现倾斜。
为了消除这些畸变,我们可以使用畸变矫正方法,它通过对图像进行逆畸变变换,将畸变图像转换为无畸变的图像。
在实际应用中,相机变换矩阵和畸变矫正经常被用于摄像机校准、三维重建、图像配准等领域。
通过准确的相机变换矩阵和畸变矫正,我们可以获得更准确的图像信息,为后续的图像处理和分析
提供可靠的基础。
同时,这些概念也为计算机视觉和图像处理领域的进一步研究和应用提供了重要的理论支持。
矩阵视频监控方案1.需求分析设计要求包含视频监控和防盗报警系统;监控摄像机分为固定安装和带云台控制两种,带云台控制的可选匀速云台和高速球两种设备;控制室要求可以同时监视所有摄像机图像;控制室设计电视墙功能,可以通过矩阵切换在电视墙监视器上显示任意一路摄像机图像;可以设置、制定录像工作计划时间表。
要求有多种录像检索方式。
系统可以通过硬盘录像机存储所有摄像机的图像资料,录像资料自动保存_____天;可以通过矩阵主控键盘和硬盘录像机同时控制云台和镜头的各种动作(包括上下左右,镜头变焦、远近控制以及高速球的变速控制和预制位控制);重要的录像资料可以备份存档;硬盘录像机具有用户权限管理功能,不同级别的用户拥有不同的使用权限。
报警系统可以定时布撤防;支持电子地图功能,当某一路探头报警时要求在电子地图中显示报警点位置。
报警系统和视频录像系统联动,当某一个报警探头报警的时候监控中心要求声、光即时报警,同时可以自动开启前端的射灯或其它照明系统;2.系统框图3.系统功能本监控系统由前端设备(摄像机、镜头、云台、防护罩、支架、解码器、报警探头、射灯等)和中心控制设备(硬盘录像机、矩阵主机、监视器、报警盒、视频分配器等)组成;中心控制设备按照功能划分分为硬盘录像系统、矩阵控制系统、报警系统组成。
下面按照各模块功能做简要介绍:1)硬盘录像系统主要功能一台数字硬盘录像机最多支持64路视频输入;本地监视、录像、回放;支持多种画面分割显示、单画面轮循显示;录像支持移动感知录像、常规录像、报警录像等多种录像方式;在局域网和广域网内均支持多画面同时回放;录像资料保存时间可以根据用户需求设置(录像数据量常规计算依据:150M/小时/路);视频窗口上可以叠加时钟和摄像机标题。
云台镜头控制(包括高速球控制,支持变速控制和预制位控制);选配专用报警解码器,同时可连接红外、烟感等多种报警探测器作为报警输入设备;硬盘录像机具有电子地图功能,用户可根据实际情况绘制电子地图和设置报警点,报警后电子地图自动弹出,显示报警方位;用户可以设定多级用户密码登陆,不同操作员可享有不同权限,以避免非法操作。
万方数据第1期李永刚.等:红外连续变焦镜头的结构设计61统,共有14片透镜,包括变焦物镜系统和二次成像系统。
镜片数日的增加,有利于校正像差,可提高像质;二次成像系统的作用是为了减小物镜的直径同时保证100%的冷屏效率。
1.2变倍组导向机构选型连续变焦镜头在连续变焦的过程中,光轴随着变倍和补偿镜组的位移始终在跳动,而光轴跳动量的大小直接影响系统的性能指标。
所以变倍、补偿镜组的导向机构设计是此红外变焦距镜头结构设计的核心。
变焦距镜头导向机构的种类很多,按接触摩擦性质可分成两大类:滑动摩擦机构和滚动摩擦机构。
滑动摩擦机构是导轨与移动镜组之间采用滑动接触方式,滚动机构是导轨与移动镜组之间采用滚动方式…。
常用的变倍机构有以下几种形式¨】:1.圆柱导轨滑动机构。
这种结构变倍精度高,径向结构尺寸小,适用于变倍和补偿组光学通光口径较小的结构。
2.两根圆柱导轨滑动机构。
由于滑动部件为两根圆柱导轨,这种结构变倍精度高,承载的负荷也比第一种大。
但是由于是超定位结构,光学通光口径太大,容易产生机构卡死现象,机构的径向尺寸也较大。
一般适用通光口径30—80mm的结构。
3.三根圆柱导轨滑动机构。
这种结构的优点是运动舒适、平稳,不容易产生卡死现象,可以带动通光口径较大的光学组件。
缺点是运动精度较前两种低,一般适用通光口径50—120mm的结构。
滚动摩擦机构就是在上述滑动摩擦机构的基础上,加上精密轴承或者精密钢球等,来减小摩擦力矩,提高系统总体性能。
根据以上经验,本文选用两根圆柱导轨形式,并且在变倍、补偿镜组与圆柱导轨之间采用精密直线轴承配合,使该机构由滑动摩擦变为滚动摩擦。
1.3调焦机构选型调焦组的作用是通过调焦机构,使调焦镜组沿光轴方向移动,以保证在远近不同距离上的物体,都能清晰地成像在像面上。
因此,它的机构优劣直接影响到变焦距镜头的成像质量。
光学系统调焦机构大体有三种方式,一种是凸轮调焦¨1,一种是采用直线电机调焦…,另一种是丝杠丝母调焦。
相机内参矩阵计算相机内参矩阵,也称为相机内部参数,是用于描述相机成像过程中的几何变换关系的一组参数。
它们通常由焦距、主点以及图像坐标原点等组成。
相机内参矩阵对相机成像的几何变换进行了数学建模,是计算机视觉和几何学等领域的重要基础。
相机内参矩阵一般是一个3x3的矩阵,通常用符号K表示。
下面我们介绍如何计算相机内参矩阵。
相机内参矩阵的第一部分是焦距。
焦距是描述镜头的参数之一,用于衡量镜头的聚焦能力。
焦距通常由镜头的物理特性决定,它与相机的视网膜位置和物理成像尺寸相关。
焦距的单位通常是毫米或厘米。
相机内参矩阵的第二部分是主点。
主点定义了相机成像平面上的原点,通常是成像平面中央的位置。
主点坐标的选取会影响到图像中心的位置,进而影响到相机成像的几何变换。
相机内参矩阵的第三部分是图像坐标原点。
图像坐标原点是定义在成像平面上的原点,它与主点的位置相关。
图像坐标原点的选取会影响到图像中心点的位置,进而影响到相机成像的几何变换。
在计算相机内参矩阵时,通常需要使用相机标定的方法。
相机标定是用于获取相机内参矩阵及其他相关参数的过程。
相机标定通常需要使用特定的校准板或标定物体,在不同的位置和角度下拍摄一系列的图片,并使用计算机视觉算法进行分析和计算。
常用的相机标定方法包括棋盘格标定和球面标定。
棋盘格标定是使用放置在平面上的棋盘格图案,通过检测相机拍摄到的棋盘格图案,计算相机内参矩阵及其他参数。
球面标定是使用球面标定物体,通过检测相机拍摄到的球面图案,计算相机内参矩阵及其他参数。
在进行相机标定时,通常需要考虑去畸变的问题。
相机成像过程中会产生畸变,包括径向畸变和切向畸变。
径向畸变是由于光线经过非球形镜片而引起的畸变,会使图像中心附近的像素位置偏移。
切向畸变是由于镜头组件装配和安装不精确而引起的畸变,会使图像中心附近的像素位置倾斜。
去畸变是通过在相机标定过程中校准和调整相机的参数,使得拍摄到的图像去除畸变的影响。
去畸变的方法及算法通常是根据已知的畸变模型进行修正。
变焦镜头计算公式变焦镜头是一种可以通过调节焦距来实现不同视角的相机镜头。
变焦镜头的设计及计算涉及到很多参数和公式,下面将详细讨论变焦镜头的计算公式。
1. 焦距的计算公式焦距是变焦镜头的关键参数,它表示了相机从镜头到成像面(例如胶片或传感器)的距离。
焦距的计算公式如下:1/f = 1/u + 1/v其中,f为焦距,u为物距(物体到镜头的距离),v为像距(像到镜头的距离)。
该公式是从透镜成像公式推导而来。
2. 光圈的计算公式光圈是变焦镜头的另一个重要参数,它控制了进入镜头的光线量。
光圈由光圈值(即f数)表示,光圈值越大,光线通量就越大。
光圈的计算公式如下:f = D / N其中,D为镜头的口径,N为光圈值。
光圈值是光圈直径与焦距的比值。
3. 变焦比的计算公式变焦比是变焦镜头的一个重要参数,表示了拍摄时能够调整的焦距范围大小。
变焦比的计算公式如下:Z = f_max / f_min其中,Z为变焦比,f_max为最大焦距,f_min为最小焦距。
变焦比越大,焦距范围就越广。
4. 像高的计算公式像高是指在成像面上表示一幅图像所占的高度。
像高的计算公式如下:h = y / m其中,h为像高,y为实际物体的高度(垂直于光轴的距离),m为物距放大率。
物距放大率表示图片上物体的实际尺寸与投射在成像面上的尺寸之比。
5. 视场角的计算公式视场角是指拍摄范围内可见的场景角度。
视场角的计算公式如下:θ = 2 × arctan(d / 2f)其中,θ为视场角,d为相机传感器的对角线长度,f为焦距。
这些公式是变焦镜头设计和计算的基础,通过这些公式,我们可以确定适合特定拍摄需求的变焦镜头的焦距范围、光圈值以及视场角度等参数。
在实际应用中,还需考虑镜头的光学质量、机械结构和对焦方式等因素。
总结起来,变焦镜头的计算公式包括焦距计算公式、光圈计算公式、变焦比计算公式、像高计算公式和视场角计算公式。
这些公式是实现不同视角的变焦镜头设计和计算的基础。
××宾馆监控系统设计方案目录第一章系统概述11.1概述11.2建设宗旨11.3基本思路1第二章系统功能2第三章系统构成4第四章设计标准54.1设计依据54.2设计原则54.3产品选型标准5第五章系统设计75.1系统组成及点位分布75.1.1 点位分布75.1.3 前端监控点配置95.2传输部分设计105.3控制及处理部分设计105.4防雷部分(可选)115.5系统原理图13第六章产品选型146.1 前端设备型号规格156.2 后端设备型号规格18第七章系统安装要求27第八章施工组织设计298.1项目实施组织构架及管理298.1.1 项目经理职责298.1.2 项目管理顾问职责298.1.3 现场经理及技术负责人的职责298.1.4 文档管理员职责308.1.5 安全员的职责308.1.6 质量员的职责308.1.7 计划员的职责308.1.8 各专业管理小组(专业工程师)岗位责任31 8.2施工方案318.2.1 工程主要内容318.2.2 施工组织总体目标318.2.3 工程中所需工具及现场管理场所要求318.2.4 施工部署328.3技术措施方案381.1概述近年来,随着电子技术的不断发展,信息技术的浪潮正在冲击和改变着人们传统的思维方式、工作方式及当今社会的各个领域。
随着人们对现代化安全防X 系统需求的不断增长,建设一套安全、高效、配置合理的安全防X及电视监控系统已经成为宾馆、大厦建设不可缺少的组成部分。
我们本着高水准、高质量,提高产品的性能价格比,在设计上充分体现建设者的意图,并考虑到今后使用者的维护、使用、保养的方便性,结合××宾馆监控的具体需要,以XX保千里电子技术公司多年来的系统工程经验,设计了本方案。
1.2建设宗旨结合××宾馆监控的实际需要,我们提出以下几条设计原则:综合考虑各子系统,保证系统安全可靠,性能价格比最优,综合优化配置。
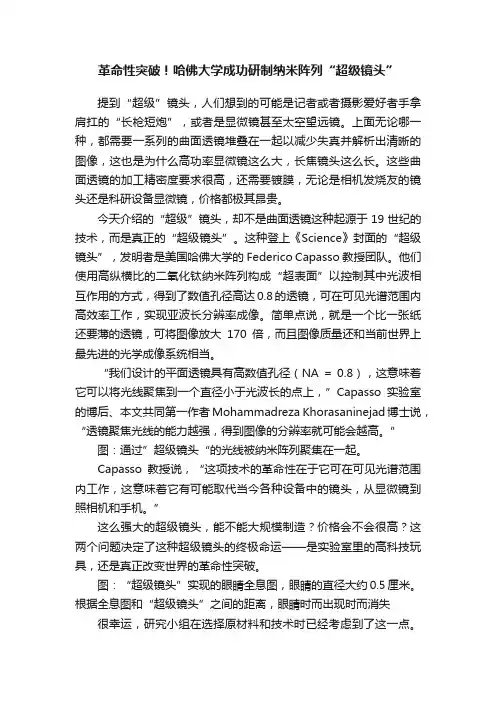
革命性突破!哈佛大学成功研制纳米阵列“超级镜头”提到“超级”镜头,人们想到的可能是记者或者摄影爱好者手拿肩扛的“长枪短炮”,或者是显微镜甚至太空望远镜。
上面无论哪一种,都需要一系列的曲面透镜堆叠在一起以减少失真并解析出清晰的图像,这也是为什么高功率显微镜这么大,长焦镜头这么长。
这些曲面透镜的加工精密度要求很高,还需要镀膜,无论是相机发烧友的镜头还是科研设备显微镜,价格都极其昂贵。
今天介绍的“超级”镜头,却不是曲面透镜这种起源于19世纪的技术,而是真正的“超级镜头”。
这种登上《Science》封面的“超级镜头”,发明者是美国哈佛大学的Federico Capasso教授团队。
他们使用高纵横比的二氧化钛纳米阵列构成“超表面”以控制其中光波相互作用的方式,得到了数值孔径高达0.8的透镜,可在可见光谱范围内高效率工作,实现亚波长分辨率成像。
简单点说,就是一个比一张纸还要薄的透镜,可将图像放大170倍,而且图像质量还和当前世界上最先进的光学成像系统相当。
“我们设计的平面透镜具有高数值孔径(NA = 0.8),这意味着它可以将光线聚焦到一个直径小于光波长的点上,”Capasso实验室的博后、本文共同第一作者Mohammadreza Khorasaninejad博士说,“透镜聚焦光线的能力越强,得到图像的分辨率就可能会越高。
”图:通过”超级镜头“的光线被纳米阵列聚集在一起。
Capasso教授说,“这项技术的革命性在于它可在可见光谱范围内工作,这意味着它有可能取代当今各种设备中的镜头,从显微镜到照相机和手机。
”这么强大的超级镜头,能不能大规模制造?价格会不会很高?这两个问题决定了这种超级镜头的终极命运——是实验室里的高科技玩具,还是真正改变世界的革命性突破。
图:“超级镜头”实现的眼睛全息图,眼睛的直径大约0.5厘米。
根据全息图和“超级镜头”之间的距离,眼睛时而出现时而消失很幸运,研究小组在选择原材料和技术时已经考虑到了这一点。
变焦镜头的设计及其应用与性能分析摄影是人们日常生活中不可或缺的一部分,而摄影器材的发展也是不断推进的。
变焦镜头是一款广泛使用的摄影镜头,其具有的变焦功能优化了拍摄体验,使得摄影师们更加方便地捕捉所需要的画面。
本文将介绍变焦镜头的设计及其应用与性能分析。
一、变焦镜头的设计变焦镜头的设计是充分考虑了摄影师们在拍摄过程中所需的各种拍摄距离和角度。
它由若干个镜片组成,其中有一些能够滑动,从而改变焦距。
同时,它还通过DIAPHRAGM机构的控制实现光圈的调节,提高拍摄的表现力。
当然,这也意味着相对于单焦镜头来说,它的成本和复杂度都会增加。
二、变焦镜头的应用变焦镜头是一种非常广泛使用的摄影器材,其应用广泛,既可以用于拍摄静物,也可以作为包括新闻摄影和电影首席摄影师在内的各种拍摄领域中。
其中,变焦镜头在电影制作领域中的应用最为广泛,可以通过其调整长焦透镜和广角透镜之间的距离,可模拟相应的镜头焦距,以便于更好地拍摄目标。
同时,由于它的变焦性质,使得拍摄人员可以在不改变拍摄位置的情况下,调整镜头的焦距,使被拍摄的目标更加醒目、清晰。
当然,在拍摄静物时,如果要保持相同的场景、相同的视角,变焦镜头也可以发挥诸多优势。
三、变焦镜头性能分析1. 焦距范围变焦镜头的焦距范围大致可以分为两个方面,一个是广角端,一个是长焦端。
广角端指相应的焦距比较小的镜头,比如10-20mm的广角变焦镜头;长焦端则是相对焦距大的变焦头,如70-300mm的变焦镜头2. 光圈范围光圈范围是指变焦镜头最大的光圈值以及最小开放光圈的范围。
相对于单焦镜头,变焦镜头的光圈范围更加丰富,这意味着可以有更多的操作空间和更好的表现力3. 畸变变焦镜头在拍摄时容易产生畸变,包括桶形畸变和枕形畸变,这需要进行处理,避免在后期处理时产生影响。
4. 分辨率每个单息点的传感器材料和成像处理器的性能,会影响变焦镜头的像素。
因此,当选购变焦镜头时,需要考虑传感器的大小、像素和成像处理器等因素。
【变焦镜头设计初始结构计算公式】在变焦镜头的设计中,初始结构计算公式是至关重要的。
通过这些公式,我们可以确定变焦镜头的基本参数,这些参数包括但不限于镜头的焦距、光圈和变焦比等。
在本文中,我将从简到繁,由浅入深地探讨变焦镜头设计的初始结构计算公式,以帮助您更深入地理解这一主题。
1. 初始结构计算公式的基本概念在变焦镜头设计中,初始结构计算公式是用于确定镜头最初的参数和基本结构的公式。
这些参数包括但不限于镜头的前后焦距、适用光圈范围、最大光圈和最小光圈等。
通过这些参数,我们可以初步确定镜头的使用范围和特性,为后续的光学设计和优化奠定基础。
2. 主要的初始结构计算公式在变焦镜头设计中,常见的初始结构计算公式包括适用光圈范围的计算公式、最大光圈和最小光圈的计算公式、前焦距和后焦距的计算公式等。
这些公式可以通过一定的推导和计算得出,具体的推导过程涉及到镜头的光学原理,这超出了本文的范畴,关于这些内容我会在后续的文章中进行详细介绍。
3. 个人观点和理解对于变焦镜头设计的初始结构计算公式,我认为这是变焦镜头设计中至关重要的一步。
通过这些计算公式,我们可以初步确定镜头的特性和参数,为后续的光学设计和优化提供基础。
这些公式也是变焦镜头设计中的关键,它们直接影响着镜头的成像质量、适用范围和使用体验。
总结回顾通过本文的介绍,我们了解了变焦镜头设计的初始结构计算公式的基本概念和主要内容。
这些公式对于确定镜头的基本参数和特性至关重要,是变焦镜头设计中的关键一步。
未来,我将继续深入探讨变焦镜头设计中的相关内容,希望能够为大家带来更多有价值的信息和知识。
在您需要的范围内,我已经按要求撰写了这篇关于变焦镜头设计初始结构计算公式的文章,希望对您有所帮助。
如果还有其他方面需要进一步讨论或调整,请随时告诉我。
对于变焦镜头设计的初始结构计算公式,我们可以进一步扩展讨论相关的内容,包括具体的公式推导和计算方法,以及不同类型变焦镜头的特点和应用。
可变焦距机器视觉镜头光学系统设计刘巧玲;陈丽娜;余华恩;柯华恒;梁秀玲【摘要】在机器视觉系统中,镜头的主要作用是将目标成像在图像传感器的光敏面上。
针对生产过程中机器视觉系统在保持工作距离不变的情况下需获得不同的放大倍数,采用机械补偿形式,利用Zemax软件设计了一款可用于机器视觉的可见光多焦点变焦物镜系统。
该系统工作距离可以在290 m m~340 m m范围内变化,实现了焦距从10 m m~100 m m的10倍多焦点变焦。
设计结果表明:该变焦物镜最大畸变小于1%,最大兼容0.84 cm (1/3英寸)CCD图像传感器。
用调制传递函数对系统的成像性能进行评估,该系统在空间频率100 lp/m m处调制传递函数大于0.3,满足成像要求。
%In machine vision systems ,lens is mainly responsible for imaging object on photosen‐sitive surface of image sensor .Based on machine vision systems ,the mechanical compensated zoom was adopted ,the Zemax software was used to design a visible multifocal zoom lens sys‐tem that could be applied in machine vision systems to address some specific situation w hile dif‐ferent magnification were required but working distance remained unchan ged during produc‐tion .The system has the working distance from 290 mm to 340 mm andthe focal length chan‐ging from 10 mm to 100 mm ,which makes 10 times multifocal zoom possible .The results show s that for this multifocal zoom lens ,the maximum distortion is less than 1% ,and it can best hold 1/3 inch CCD image sensor .The system imaging performance was assessed by modu‐lation transfer function(MTF) ,and MTF is greater than 0 .3 at the frequency of 100 lp/mm , w hich meets the imaging demands .【期刊名称】《应用光学》【年(卷),期】2015(000)002【总页数】7页(P199-205)【关键词】光学设计;变焦系统;机械补偿变焦;机器视觉【作者】刘巧玲;陈丽娜;余华恩;柯华恒;梁秀玲【作者单位】福建师范大学光电与信息工程学院福建省光子技术重点实验室,福建福州350007;福建师范大学光电与信息工程学院福建省光子技术重点实验室,福建福州350007;福建师范大学光电与信息工程学院福建省光子技术重点实验室,福建福州350007;福建师范大学光电与信息工程学院福建省光子技术重点实验室,福建福州350007;福建师范大学光电与信息工程学院福建省光子技术重点实验室,福建福州350007【正文语种】中文【中图分类】TN942.2;O439引言典型的机器视觉系统一般包括光源、光学镜头、智能相机、图像处理单元(或图像采集卡)、图像分析处理软件、监视器、通讯/输入输出单元等。
已知相机内参矩阵求焦距的方法在计算机视觉和计算机图形学领域,相机内参矩阵是描述相机内部参数的重要工具。
它包含了相机的焦距、主点坐标和畸变参数等信息。
在实际应用中,我们有时需要根据已知的相机内参矩阵来求取相机的焦距,以便进行后续的图像处理和计算。
为了求取相机的焦距,我们可以利用相机内参矩阵中的焦距参数。
相机内参矩阵通常表示为如下形式:\[K = \begin{bmatrix} f_x & s & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}\]其中,\(f_x\)和\(f_y\)分别表示相机在水平和垂直方向上的焦距,\(s\)表示相机的非正交性,\(c_x\)和\(c_y\)表示主点的坐标。
根据相机内参矩阵的定义,我们可以直接从中获取相机的焦距。
具体而言,水平和垂直方向上的焦距可以通过以下公式计算得到:\[f_x = K_{11}\]\[f_y = K_{22}\]其中,\(K_{11}\)和\(K_{22}\)分别表示相机内参矩阵中的第一行第一列和第二行第二列的元素。
通过以上公式,我们可以根据已知的相机内参矩阵来计算相机的焦距。
这一方法简单直接,并且适用于大多数常见的相机模型。
在实际应用中,我们可以根据这一方法来获取相机的焦距,从而为后续的图像处理和计算提供重要的参数信息。
总之,已知相机内参矩阵求焦距的方法是一种简单有效的计算手段,它为相机标定和图像处理提供了重要的理论基础和实际支持。
通过深入理解相机内参矩阵的含义和计算方法,我们可以更好地理解相机的内部结构和参数,为相关领域的研究和应用提供有力支持。
数码相机拍摄矩阵全景照片和在线浏览的方法数码相机加自动分度转动云台可以使用矩阵拍摄方法,拍摄数十甚至数百张照片拼接成一张巨幅全景照片,奥巴马就职演说的那一张著名全景照片就是用这种拍摄方法完成,当时用的相机只是佳能G10。
数码相机用矩阵拍摄方法一直在不停的发展,继去年德国公司A.F.B.MediaGmbH使用1665张5D mark II拍摄的照片拼接成一幅297500 x 87500像素的照片以后,法国小伙子Arnaud Frich同样使用5D mark II,拍摄2346张照片拼接成一幅354159 x 75570的照片,打破他们创下的记录。
这幅照片的总像素数高达267.6亿。
拍摄这样的“全景”照片不可能依赖手工控制,他使用了电动的分度云台拍摄,然后再用软件进行拼接。
如此巨大数据量、巨大尺寸的数码照片,在互联网上以原始尺寸实时浏览不能一次下载,必须采用“碎片下载”、“按需下载”的方法,目前有微软公司HDView动态浏览技术,和adobe公司Zoomify动态浏览技术,这种技术可以采用“碎片下载”、“按需下载”的原则,将一幅巨幅照片,切割为数百甚至上万个256×256像素,每个仅20K左右的“碎片”,以提高下载速度;当图象放大时,仅对屏幕可见部分的内容下载,从而减少电脑资源消耗。
目前的Zoomify技术可以在线浏览上十亿乃至百亿像素数码拼接照片。
而电脑初次浏览HDview巨幅全景照片,须要下载一个浏览插件,实现真正的“无级缩放”和平滑流畅的拖拽移动。
浏览这样的照片,很像使用Google Earth看地图的感觉。
科技日新不能不让我们赞叹,在短短的时间里矩阵拍全景的像素就从14.7亿像素扩展到了267.6亿像素。
多核电脑、软件技术、自动全景拍摄云台,这三样技术的结合和发展带来了图像拍摄技术的飞跃。
如果拥有了一般的数码相机单反相机,只要加装上自动全景数控分度云台,就可以使用矩阵拍摄方法和360度环拍方法,拍摄出像素数百亿,达到电脑处理能力极限的相片,相信随着电脑的发展,记录会一次又一次被突破。
各位网友:你们好!前面发的关于“数码镜头设计原理”中的前两贴想已见过了,那里介绍的是最基础的东西。
现在光电产品千变万化,但万变不离其宗,其基本原理,基本理论确不象外表那样善变,使人迷糊。
如果我们建立了扎实的光学与数学的理论基础,那么在接触新产品后,就能快的多的消化吸收,由被动的感性认识,提升为主动的理性认识,,从而在设计上游刃有余。
现在光电产品出现了许多新的特征,利用基础理论去探讨其内在的规律、推演公式去精确的把握它。
在“数码镜头设计原理_变焦篇”中,是基础篇、高级篇基本理论的引深。
变焦设计是个很复杂的过程,有很多是凭着感觉走的。
感觉就是灵感,它能快速引导设计人员在迷宫中及时调整方向,免除了在局部问题上纠缠不休,向更具创造性的思维迈进。
感觉是我们以基本理论作基石,实践经验为引导,在设计领域产生的奇思妙想。
例如:我们在引用专利时,往往是将一个专利改进成合于我们产品性能要求就行了。
大家想过没有,专利也可东拼西凑?如果能这样做,就能使专例可利用的价值大大提升,同时也免除了专利侵权的尴尬场面发生。
另外想过没有,虚拟玻璃在光学设计中不太好控制。
我们可否用特定的方法有效的控制它:我们将玻璃改成虚拟玻璃,然后控制优化步长为单步,或五步。
这样不断观查那些玻璃超出范围,超出的退回前步(每一步存盘一次,退回操作就可用调前次文件来实现),将其固定(不设为变量)。
由于虚拟玻璃比实际玻璃敏感的多,会使色差得到极有效的控制。
在变焦设计中由变焦引入的约束很多,它们干扰了象质的优化,这成为了变焦系统是否设计成功的关键。
如何使这些约束条件的违背在自动设计中越变越小,从而使系统校正能力转移到象差设计中来,框架原理指明了方向。
没有任何这方面的系统论述,要花精力去探讨这个问题,这就是灵感的引导,使我及早找到了变焦设计深入下去的钥匙...。
真诚的希望各位朋友,通过学习,把握灵感产生的瞬间,去享受它给你代来的惊喜!我在“Zemax的超级应用”一贴中,指出了将它作为计算器应用的重大意义。
电视监控控制/矩阵主机使用说明书目录1.主控键盘的按键说明 (2)1.1.系统设置区 (2)1.2.输入区 (3)1.3.切换区 (4)1.4.云台镜头控制与辅助功能区 (5)1.5. 摇杆 (6)1.6.两个窗口 (7)1.7.键盘锁 (7)2.主控键盘的操作说明 (7)2.1.菜单打开之前的系统状态 (7)2.1.菜单的打开 (8)2.2.菜单说明 (9)2.3.辅助功能说明 (18)3.对外接口 (19)3.1.切换/控制主机的对外接口 (19)3.2控制键盘与切换/控制主机的连接 (19)3.3. 切换/控制主机与解码器的连接 (21)3.4.切换/控制主机与多媒体计算机的连接 (22)3.5.切换/控制主机的报警探测器及继电器接口 (22)3.6.切换/控制主机的视音频接口 (23)电视监控控制/矩阵主机使用说明书本系统主要由主控键盘与矩阵组成。
1.主控键盘的按键说明本系统主控键盘面板(如上图)由以下几个部分组成,从左至右分别是:系统设置区、输入区、切换区、云台控制与辅助功能区、摇杆控制区为了方便您的操作,最好先熟悉各个键的名称、位置及其主要功能:1.1.系统设置区在这个区,您可以通过编辑各项菜单来设置您的系统。
TAB键:又称跳格键,主要用来转移参数设置对象,大部分操作中您将频繁地使用它。
STATUS键:又称状态键,主要用来转换报警的设防与撤防、探测器的是否在位、继电器的开与关及切换选择的使用。
MENU键:即菜单键,与输入区的数字键合用可以开启菜单。
如您想开启第3号菜单,只要先在输入区按下3键,再在系统设置区按下MENU键,您就可以进入3号菜单,进行编辑。
ENTER键:即回车键,在您完成某项菜单的编辑以后,按下此键,则完成此项编辑,并回到时间显示,此时可以开始进行下一项菜单的编辑。
PRINT键:即打印键,在系统有报警后,报警信息将储存在存储器中,如果需要,可以利用微型打印机将报警信息打印出来。
文章编号!"##$%$#&$’$##()#*%#$&+%#+用矩阵方法设计变焦镜头赵存华’洛阳师范学院物理与电子科学系,河南洛阳+("#$$)摘要!传统上,在设计变焦距镜头时都要利用高斯光学求解变焦距的各组元焦距-组间隔.与传统方法不同的是,该文利用矩阵光学理论,建立变焦距镜头的光线传输矩阵,并以此矩阵建立非线性方程组,然后用数学软件对其求解,得到各组元的焦距-组间隔等参数.最后以设计一个普通的摄像物镜为例,演示了矩阵光学在设计变焦距镜头中的应用.关键词!矩阵光学/变焦距镜头/光学设计/01234中图分类号!567+$8$文献标志码!9:;<=>?@A B C @@D E ;?<<F <G ;D H =G ID B G J =KD ;G I @LM N 9O 0P Q %R P S’T 3U S V W X 3Q W 1Y Z R [\]^\S Q 2_‘3^W V 1Q ]^\a ^]3Q ^3,b P 1[S Q c61V X S ‘01‘‘3c 3,b P 1[S Q c +("#$$,0R ]Q S)d e <G J B f G !5R 3g S P \\]S Q1U W ]^\]\W V S 2]W ]1Q S ‘‘[P \32W 1^S ‘^P ‘S W 3W R 3Y 1^P \1Y 3h 3V [3‘3X 3Q W S Q 2W R 32]\W S Q ^3\i 3W j 33Q W R 3X ]Q S k 11X \[\W 3X 85R ]\23\]c Q X 3W R 12]\2]Y Y 3V 3Q WY V 1X W R 3W V S 2]W ]1Q S ‘1Q 389‘‘W R 3U S V S X 3W 3V \1Y W R 3k 11X \[\W 3X S V 3S ^R ]3h 32j ]W RX S W R 3X S W ]^\1Y W j S V 3,j R ]^R\1‘h 3\S Q 1Q ‘]Q 3S V 3l P S W ]1Qc V 1P U\3W P Uj ]W RS V S [%W V S Q \X ]\\]1QX S W V ]m1Y W R 3k 11X ‘3Q \,i S \321Q W R 3W R 31V [1YW R 3X S W V ]m 1U W ]^\89W‘S \W ,W R 3S U U ‘]^S W ]1Q 1YX S W V ]m 1U W ]^\]\23X 1Q \W V S W 32]Q23\]c Q ]Q cS k 11X \[\W 3X 1Y S c 3Q 3V S ‘^S X 3V S ‘3Q \8n ;FH @J L <!X S W V ]m1U W ]^\/k 11X ‘3Q \/1U W ]^S ‘23\]c Q /01234引言在现代社会中,变焦距镜头有很多应用,比如数码相机镜头,高速摄影镜头和某些现代化光电武器中的观瞄装置等.它们在像素和体积轻薄化方面不断地对变焦距设计提出更高的要求.通常,变焦距设计一般先进行变焦距的高斯光学计算o "%+p,计算出前固定组-变倍组-补偿组和后固定组等各组的焦距-组间隔等/然后用焦距-组间隔求得各组元第一-第二近轴光线在各组元上的投射高度和入射角/再由初级像差理论计算赛德’a 3]2S ‘)像差和,最后由赛德像差和求解方程组,得到各组元的q r 和s r ,分解q r和s r 可得到各组元结构参数.与传统方法不同的是,笔者从矩阵光学理论出发,首先建立变焦距光学系统的光线传输矩阵,以此建立一个非线性方程组,然后利用数学软件直接解出各组元的焦距-组间隔.最后,以一个变焦距镜头的设计为例,演示了此方法的设计过程."用矩阵方法计算变焦距一阶特性变焦距系统一般都由前固定组-变倍组-补偿组和后固定组+部分组成’当然也可能去掉前固定组或后固定组,或再加入前调焦组,后固定组分离等变形).通常的四组元变焦系统中,前固定组和后固定组一般为正光焦度系统,变倍组为负光焦度系统,补偿组光焦度可正可负.补偿组光焦度为正,称为正组补偿变焦系统,反之为负组补偿变焦距系统o t %u p.收稿日期!$##u %"$%"$/修回日期!$##u %"$%"7基金项目!河南省自然科学基金资助’#u ""#t +###)/河南省教育厅自然科学基金资助’$##t "#+&$##t )作者简介!赵存华’"7(t v),男,河南新蔡人,硕士,主要从事光学设计和激光技术的研究工作._%X S ]‘!k R S 18^P Q 8R P S w"u *8^1X第$&卷第*期$##(年t 月应用光学x 1P V Q S ‘1Y 9U U ‘]32O U W ]^\41‘8$&,618*yS [,$##(正组补偿的变焦距系统原理如图!所示"图中四组元的焦距假定为#!$#%$#&和#’$各组间隔分别为($)$*"这个四组元光学系统的光线传输+++++++++++++++++++++++++++++++++++++++++++++++++矩阵为,-./0123-!45!6#’014!*014!!45!6#&01!!)014!!45!6#%01!!(014!!45!6#!01+++++++++++++++++++++++++++++++++++++++++++++++++42T %UY Z [-5.2T &U 式中V #K W K J X 是整个系统的焦距S Y Z \是系统的后焦截距"令T %U 式为每个焦长时的焦距值$可以得到&个方程S 令T &U 式的后焦截距为一定值T 比如’N N U$又可以得到&个方程S 为了变焦的需要$使每个焦长状态下&个间隔($)$*的和值保持不变T 比如等于]N N U $又可得到&个方程"这样$再找’个方程即可"从矩阵光学理论可知$光学系统的前焦面到后焦面的光线传输矩阵为^-4#K W K J X5!6#K W K J X _‘a b 4-! 5.62014!,!5362014!T ’U 因此$对&种焦长状态下计算的&个矩阵^的第一行第二项就是系统焦距值$这样我们又得到&个方程"那么$剩下的一个方程可以用任一焦长时矩阵^的后焦截距值为零给出"针对!&个变量对应的!&个方程$它们应有唯一数值解$我们可借助数学软件IJ K L M N J K O P J来求解"%举例以设计一个焦距为]c%’N N $\6%:]c’:d $像面大小为e N N fe N N 的&倍变焦镜头为例$给出矩阵法的使用过程"在求解过程中$为了使设计的系统最小化$令&个面间隔之和为]N N $后焦截距为’N N $将无穷远成像在后焦面上T 摄像物镜U "使用IJ K L M N J K O P J 求解后$所得结果如!表和表%所示"表!四组元焦距g h i @A !7B >j F B C C B j <9<B j ?F 8=D B B EN N#!-e :!’k k l #%-!:%4e l ]#&-&:4%k k #’-!k :k e !!表%各焦长状态下的组元间隔g h i @A %g m A F A ?h <h H 8B =F B C C B j <9<B j ?Fh H n 8C C A <A =H C B >j FN N焦长间隔()*#-]’:!k %]&%:k l %’’!:4k ’k &#-!&’:&&4]&!:e %d’%:4&dk k #-!]’:’&!&%4:]e %e %’%:k 4e4e #-%’’:l 4]4’4:!&lk !&:&l e%l从表!和表%可以看出$上面的解是合理的"因为不存在负值$所以理论上这样的变焦距镜头是可以实现的"&求解初始结构在求得以上变焦距各组元焦距和间隔的基础上$我们求解它的初始结构$这与传统的高斯光学计算之后的求解过程完全一样"先追迹第一和第二近轴光线$求得各组上的投射高度和入射角度"在求解过程中$使用的公式为o p q !-o p 53r s p q !T l Us p q !-s pq o p#pT e U在已求得各组元投射高度和入射角的情况下$rl ]%r 应用光学%44k $%]T &U赵存华V 用矩阵方法设计变焦镜头求解初级像差系数!令各系数为零"事实上!在各初级像差系数中!归一化的#$和%&在不同的入射角度下其值不同!需要把每一个归一化的#$和%&转化为物在无穷远处的#$’和%&’!即#$(%&’)*+,-./0,10 %&(%&’)*+,2%&’.30.*+-,4.-/0,50上式中符号上面的横杠代表归一化为6(3和7(3时的值"对于2个组元共有2对5个#$’和%&’值!但方程的总数为3-个!即893(89-(894(:,;0 8<3(8<-(8<4(:,3:0 8=3(8=-(8=4(:,3308>3(8>-(8>4(:,3-0如果任意拿出5个方程,初级像差系数为零0求解之!那么在这5个初级像差系数为零的情况下!其他初级像差系数可能很大!这并非最佳综合效果"所以!笔者使用最小二乘法编制程序!求解最佳的#$’和%&’!以获得最佳的初级像差系数组合!而不是完全使之为零"经过反复求解!得到一组#$’和%&’值!如表4所示"表4#$’和%&’值?@A B C4D@B E C F G H I+’@J KL&’前固定组变倍组补偿组后固定组#’:M::-4N43N42:M-;14325N N)4M4O N N55N3)42M2;4214 %’):M-N41514N O:M452N O;2252M N:3N N1-N4)3-M1:;2-14 #:):M3-1;:2:M-21:13)3;M42N3)314M352在已知上组#$’和%&’值的情况下各状态像差值如表2所示"表2像差值?@A B C2D@B E C F G H@A A C P@Q R G J球差彗差像散匹兹瓦场曲畸变6(5SS:M32345:M::::34:M::4-23M2N4N1:M::-4 6(35SS):M:-1132:M::::-3;M O2:5O3N M;32;):M3-1N O1 6(-2SS:M:::2:M:::4N:M:::13-3M2N4O-:M::3-分解上面的#$’和%&’值可以得到变焦镜头的初始结构"经通用光学设计软件T U V W X优化处理后得到的最终结果如表N所示"从表N可以看出!优化后的数据证明了矩阵求解的可行性和正确性"在4个焦长位置处,6( 5S S!6(35S S和6(-2S S0的轮廓图如图-所示"它的YZ[曲线如图4所示"在空间分辨率N:\]^S S处!镜头在任何状态下视场均大于:M-_在空间分辨率-:\]^S S处!除焦距为5S S的镜头最大视场为:M25外!其他均超过:M O_在空间分表N优化后的变焦镜头结构参数?@A B C N‘G J F Q P E a Q E P@B b@P@c C Q C P F G HdddG b Q R c R e C Ke G G c B C J F S Sdd面号半径间隔玻璃面号半径间隔玻璃3N N M;::O4M;111f g333N M1134-M-5;5f gdd1 -)332M;2O1:M-3-)5M33443f[ddN 431M:;;-4M;O N2f gdd;34)-2M-:2;:M-dd2;2M132-:M N:1N3M N-3NN2O3M54-;3f[ddO-M::24O41M3-N-32h i j k i k l mdd3M:;-4N M;4523N N O M;1143M-N O2n o[dd-dd;M323-3O)1M42N5:M22OO115M31:33f g;31)2M::5-3p o[dd1 5N M4N423M434;35)-5M52-33M3:2;n o[dd-;1M5N153q gdd43;)32M;5O5O M43:1M24533:M O O1N-:ddh So r Wdd4M45OO:M-辨率为N\]^S S处!镜头在任何状态下的视场均大于:M;N"用矩阵方法设计变焦镜头!结论从矩阵光学理论出发"建立了四组元变焦距镜头的光线传输矩阵"并以此为基础构造了一个非线性方程组#此方程组完全可以利用数学软件对其进行数值求解"以得到变焦距系统的初始结构#文章以设计一个普通的变焦距摄像镜头为例"演示了矩阵方法在变焦距镜头设计中的运用#参考文献$%&’胡家升"光学工程导论%(’)大连$大连理工大学出版社"*++*),-./0123456)7589:;<=8/:58::>8/=0?456/5449/56%(’)*834;)@0?/05$@0?/05-5/A 492/8B :C D 4=35:?:6BE 9422"*++*)F /5G 3/5424H %*’林大健)工程光学系统设计%(’)北京$机械工业出版社"&I J K )L 7M @01N /05)O >8/=0?456/5449/56;42/65%(’)P 4/N /56$G 3/50(4=3/54E 9422"&I J K )F /5G 3/5424H %K ’常群)光学设计文集%(’)北京$科学出版社"&I Q R )G ,S M T U <5)G :9><2:5:>8/=0?;42/65%(’)P 4/N /56$V =/45=4E 9422"&I Q R )F /5G 3/5424H %!’张良)中波红外变焦距系统的光学设计%.’)应用光学"*++R "*Q F &H $K *1K !)W ,S M T L /056)O >8/=0?;42/65C :9X /;;?4/5C 9094;Y ::X 2B 284X %.’).:<950?:C S >>?/4;O >8/=2"*++R "*Q F &H $K *1K !)F /5G 3/5424H %Z ’@7D D [O M \)现代几何光学%(’)詹涵菁"译)长沙$湖南大学出版社"*++!)@7D D [O M \)(:;4564:X 489B :>/8=2%(’)89052?084;]B W ,S M ,051N /56)G 3056230$,<505-5/A 492/8BE 9422"*++!)F /5G 3/5424H %R ’^S M T V 30:1X /5"W ,S O @0:1X <)(089/_O >8/=2%(’)P 4/N /56$G 3/50,/6349[;<=08/:5E 9422‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘"*+++)第R 届慕尼黑上海电子展及第*届慕尼黑上海激光a 光电展各项指标再创新高*++Q 年K 月*K 日在上海新国际博览中心落下帷幕的慕尼黑上海电子展及慕尼黑上海激光a光电展再次证明了中国电子行业与激光a 光电行业兴旺的发展势头#本届慕尼黑上海电子展在K 天内吸引了逾*K Z ++名专业观众汇聚这个理想的平台寻觅商机"比去年增加了*!b#来自*+个国家的K Q Z 名展商在上海新国际博览中心展示了他们最新的产品及服务"展商数较上届增长了&K b#与慕尼黑上海电子展同期举办的慕尼黑上海激光a 光电展吸引了超过I +++名观众#在去年首展大获成功之后"今年又齐集了德商罗芬a 通快a T V 7集团a 美国相干a 光谱物理与大族激光a 楚天a 华工科技a 华北光电等国内外知名企业"展览总面积较上届增长了*&b"国内展商数目增长了!K b#此次展会的主办方慕尼黑国际博览集团在海外显示了其强大的号召力#德国再次组织了大型的国家展团#此外"英国a 韩国a 日本和台湾地区展团也共同参与了此次展会#仅慕尼黑上海电子展就有!Q b 的国际展商慕名而来#慕尼黑国际博览集团董事总经理c ?0<2@/889/=3先生说$d 国际展商的持续增长显示了中国市场在全球电子产业链中的地位与日俱增"慕尼黑上海电子展正逐渐成为中国市场重要的电子展#e作为光电技术类专业期刊ff g 应用光学h 连续*次派员参加了慕尼黑上海电子展及慕尼黑上海激光a 光电展"展会期间广交朋友"与新老客户进行广泛接触和沟通"进一步宣传了刊物#下届慕尼黑上海电子展"慕尼黑上海激光a 光电展将于*++J 年K 月&J 至*+日在上海新国际博览中心举行#iQ J *i 应用光学*++Q "*J F K H赵存华$用矩阵方法设计变焦镜头。