3d轮廓仪原理
- 格式:docx
- 大小:11.96 KB
- 文档页数:1
3d线扫描相机工作原理3D线扫描相机是一种新型的技术,它可以捕捉物体的三维形状,并将其转换为数字信号。
它的工作原理是,通过一个激光线来扫描物体,并将激光线反射回来的信号转换成数字信号,从而获得物体的三维形状。
3D线扫描相机的结构主要由激光源、激光探测器、激光控制器和数据处理器组成。
激光源是3D线扫描相机的核心部件,它可以产生一条精确的激光线,用于扫描物体。
激光探测器是用来接收激光线反射回来的信号,并将其转换成数字信号。
激光控制器是用来控制激光源,使其产生准确的激光线,以便捕捉物体的三维形状。
数据处理器是用来处理激光探测器接收到的数字信号,从而获得物体的三维形状。
3D线扫描相机的工作原理是,首先,激光源产生一条精确的激光线,然后将激光线扫描到物体上,激光线反射回来的信号被激光探测器接收,并将其转换成数字信号。
接着,数据处理器处理激光探测器接收到的数字信号,从而获得物体的三维形状。
最后,将获得的三维形状信息存储在计算机中,以便进行后续处理。
3D线扫描相机的优点是,它可以快速准确地捕捉物体的三维形状,而且可以捕捉到物体的细节,比如深度、轮廓、表面细节等。
此外,它还可以捕捉到物体的动态变化,比如物体的位置、速度等。
3D线扫描相机的应用非常广泛,它可以用于工业自动化、机器视觉、机器人技术、医学成像、安全监控等领域。
它可以用来检测物体的形状、尺寸、位置等,从而提高工业生产的效率,改善产品的质量。
此外,它还可以用来检测物体的动态变化,从而实现机器人的自动控制,提高机器人的精度和效率。
总之,3D线扫描相机是一种新型的技术,它可以快速准确地捕捉物体的三维形状,并将其转换为数字信号,具有广泛的应用前景。
几何量测量基本原理及精密仪器物体几何量的测量方法和仪器详解在现代科技的发展中,几何量测量已经成为许多工程领域的重要部分。
通过准确测量物体的形状、尺寸等几何属性,可以为产品设计、机械加工、工程测量等提供重要的依据。
如何进行几何量测量以及如何选择合适的仪器?几何量测量主要涉及到长度、角度、形状等几个方面,其中长度测量是基本的一种。
长度测量的基本原理是利用测量仪器的刻度尺或测量传感器,通过对物体两个端点之间的距离进行测量,从而确定物体的长度。
而角度测量则是通过测量物体之间的夹角来确定物体的角度。
形状测量则是通过测量物体表面的曲率、弯曲程度等指标,来描述物体的形状特征。
传统的几何量测量仪器包括千分尺、角度尺、游标卡尺等,这些仪器能够满足一般的几何量测量需求。
但是随着科技的发展,越来越多高精度测量仪器被应用于几何量测量领域。
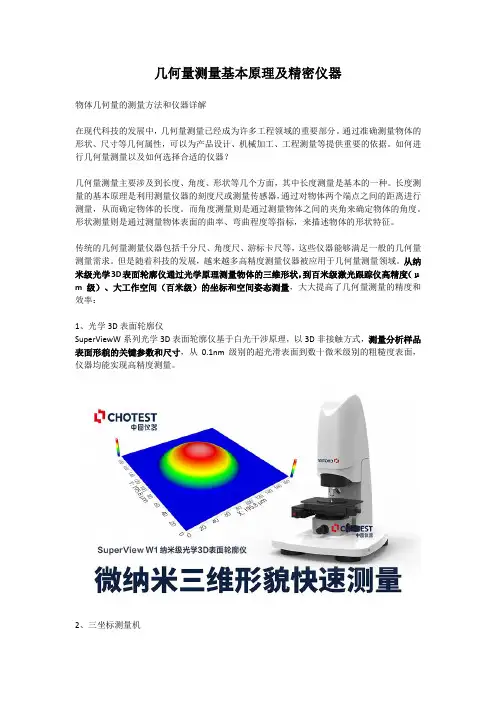
从纳米级光学3D表面轮廓仪通过光学原理测量物体的三维形状,到百米级激光跟踪仪高精度(μm级)、大工作空间(百米级)的坐标和空间姿态测量,大大提高了几何量测量的精度和效率:1、光学3D表面轮廓仪SuperViewW系列光学3D表面轮廓仪基于白光干涉原理,以3D非接触方式,测量分析样品表面形貌的关键参数和尺寸,从0.1nm级别的超光滑表面到数十微米级别的粗糙度表面,仪器均能实现高精度测量。
2、三坐标测量机MarsClassic系列三坐标是国产三坐标测量机,控制器、测头测座、软件全自主研发,安全可控。
最大允许示值误差(1.5+L/350)μm,测量行程从500mmx700mmx500mm延伸到800mmx1000mmx600mm,提供了丰富的计量解决方案。
3、粗糙度轮廓仪SJ57系列粗糙度轮廓仪一体机一次测量同时评定轮廓和粗糙度参数。
SJ5730具有12mm~24mm的大量程粗糙度测量范围,分辨率高达0.1nm,系统残差小于3nm。
纳米级大量程粗糙度测量,高精度、高稳定性、高重复性特点,是大曲面测量(轴承、人工关节、精密模具、齿轮、叶片、轴承滚子)领域精细粗糙度测量的利器。
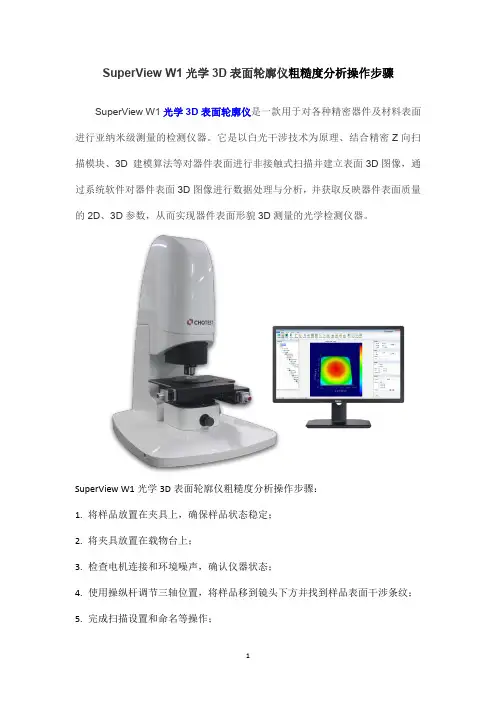
SuperView W1光学3D表面轮廓仪粗糙度分析操作步骤
SuperView W1光学3D表面轮廓仪是一款用于对各种精密器件及材料表面进行亚纳米级测量的检测仪器。
它是以白光干涉技术为原理、结合精密Z向扫描模块、3D建模算法等对器件表面进行非接触式扫描并建立表面3D图像,通过系统软件对器件表面3D图像进行数据处理与分析,并获取反映器件表面质量的2D、3D参数,从而实现器件表面形貌3D测量的光学检测仪器。
SuperView W1光学3D表面轮廓仪粗糙度分析操作步骤:
1.将样品放置在夹具上,确保样品状态稳定;
2.将夹具放置在载物台上;
3.检查电机连接和环境噪声,确认仪器状态;
4.使用操纵杆调节三轴位置,将样品移到镜头下方并找到样品表面干涉条纹;
5.完成扫描设置和命名等操作;
6.点击开始测量(进入3D视图窗口旋转调整观察一会);
7.进入数据处理界面,点击“去除外形”,采用默认参数,点击应用获取样品表面粗糙度轮廓;
8.进入分析工具模块,点击参数分析,直接获取面粗糙度数据,点击右侧参数标准可更换参数标准,增删参数类型;
9.如果想获取线粗糙度数据,则需提取剖面线;
10.进入数据处理界面,点击“提取剖面”图标,选择合适方向剖面线进行剖面轮廓提取;
11.进入分析工具界面,点击“参数分析”图标,点击右侧参数标准,勾选所需线粗糙度相关参数,即可获取线粗糙度Ra数据。

相移轮廓术原理
相移轮廓术是一种非接触式三维测量技术,主要用于精确地测量工件表面形貌。
相移轮廓术的原理是利用光的干涉理论,根据物体表面对入射光的反射或透射,得到物体表面形貌信息。
具体实现方式是,将一个光源照射到待测物体表面,利用相移技术,通过对光波的相位变化进行计算,得到物体表面高度分布的信息。
相移轮廓术优点是测量速度快、精度高、测量范围广等。
具体操作原理分为以下几步:
1.照射光源:首先,需要将光源照射到待测物体表面,通常采用的光源有激光、白光等多种类型。
2.获取干涉图像:利用间接反射法、投射式测量法或透射式测量法,获取物体表面的干涉图像。
3.相移:通过改变相对光路、改变物体位置或改变光源等方式,进行四次以上的干涉图像的拍摄,然后对拍摄干涉图像进行数字处理,得到物体表面高度的相位分布信息。
4.重建物体表面:利用相位信息和光学原理,可以将物体表面的相位信息转化为物体表面高度信息,从而得到物体表面的全息图和三维形貌。
总之,相移轮廓术是一种基于光的干涉原理,可以非接触式地测量物体表面形貌的高精度技术。
在制造业、医疗、军事、文物修复等领域都有广泛的应用。
3D成像方法汇总(原理解析)---双目视觉、激光三角、结构光、ToF、光场、全息3D成像方法汇总介绍:这里要介绍的是真正的3D成像,得到物体三维的图形,是立体的图像。
而不是利用人眼视觉差异的特点,错误感知到的假三维信息。
原理上分类:主要常用有:1、双目立体视觉法(Stereo Vision)2、激光三角法(Laser triangulation)3、结构光3D成像(Structured light 3D imaging)4、飞行时间法ToF(Time of flight)5、光场成像法(Light field of imaging)6、全息投影技术(Front-projected holographic display)7、补充:戳穿假全息上面原理之间可能会有交叉。
而激光雷达不是3D成像原理上的一个分类,而是一种具体方法。
激光雷达的3D成像原理有:三角测距法、飞行时间T oF法等。
激光雷达按照实现方式分类有:机械式、混合固态、基于光学相控阵固态、基于MEMS式混合固态、基于FLASH式固态等。
1、双目立体视觉法:就和人的两个眼睛一样,各种两个摄像头的手机大都会用这种方法来获得深度信息,从而得到三维图像。
但深度受到两个摄像头之间距离的限制。
视差图:双目立体视觉融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像。
对于视差的理解可以自己体验一下:将手指头放在离眼睛不同距离的位置,并轮换睁、闭左右眼,可以发现手指在不同距离的位置,视觉差也不同,且距离越近,视差越大。
提到视差图,就有深度图,深度图像也叫距离影像,是指将从图像采集器到场景中各点的距离(深度)值作为像素值的图像。
深度图与点云的区别,点云:当一束激光照射到物体表面时,所反射的激光会携带方位、距离等信息。
若将激光束按照某种轨迹进行扫描,便会边扫描边记录到反射的激光点信息,由于扫描极为精细,则能够得到大量的激光点,因而就可形成激光点云。
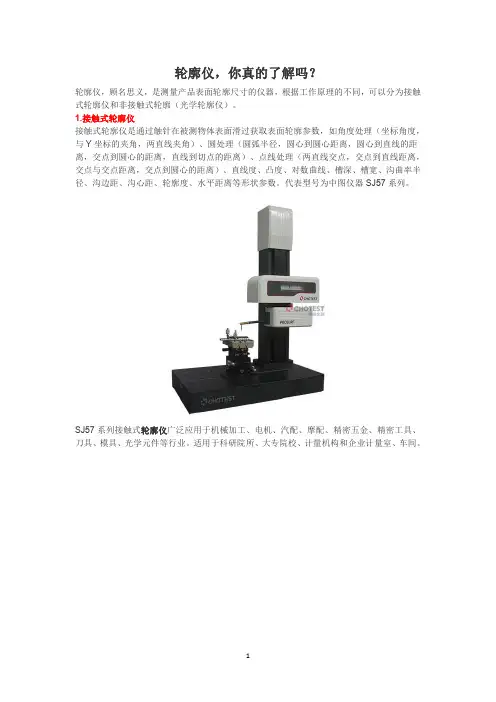
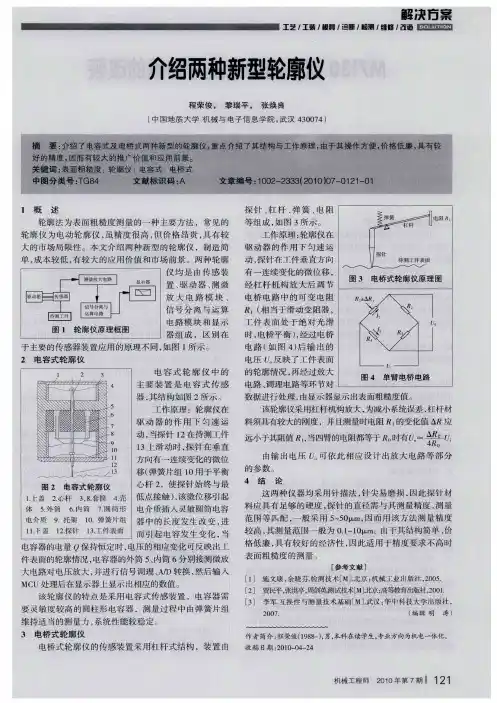
轮廓仪,你真的了解吗?
轮廓仪,顾名思义,是测量产品表面轮廓尺寸的仪器,根据工作原理的不同,可以分为接触式轮廓仪和非接触式轮廓(光学轮廓仪)。
1.接触式轮廓仪
接触式轮廓仪是通过触针在被测物体表面滑过获取表面轮廓参数,如角度处理(坐标角度,与Y坐标的夹角,两直线夹角)、圆处理(圆弧半径,圆心到圆心距离,圆心到直线的距离,交点到圆心的距离,直线到切点的距离)、点线处理(两直线交点,交点到直线距离,交点与交点距离,交点到圆心的距离)、直线度、凸度、对数曲线、槽深、槽宽、沟曲率半径、沟边距、沟心距、轮廓度、水平距离等形状参数。
代表型号为中图仪器SJ57系列。
SJ57系列接触式轮廓仪广泛应用于机械加工、电机、汽配、摩配、精密五金、精密工具、刀具、模具、光学元件等行业。
适用于科研院所、大专院校、计量机构和企业计量室、车间。
2.非接触式轮廓仪(光学轮廓仪)
非接触式轮廓仪(光学轮廓仪)是以白光干涉为原理制成的一款高精度微观形貌测量仪器,可测各类从超光滑到粗糙、低反射率到高反射率的物体表面,从纳米到微米级别工件的粗糙度、平整度、微观几何轮廓、曲率等,提供依据ISO/ASME/EUR/GBT四大国内外标准共
计300余种2D、3D参数作为评价标准。
代表型号为中图仪器Super View W1系列。
SuperView W1光学轮廓仪可广泛应用于半导体制造及封装工艺检测、3C电子玻璃屏及其精密配件、光学加工、微纳材料及制造、汽车零部件、MEMS器件等超精密加工行业及航
空航天、国防军工、科研院所等领域中。
3d轮廓扫描仪原理3D轮廓扫描仪是一种常用于数字化三维物体表面形状的设备。
它可以通过扫描物体表面的轮廓信息,将其转换为具有坐标和颜色信息的三维点云数据。
其原理是使用激光束或光栅投影技术对物体进行扫描,然后通过计算机处理和重建算法得到物体的三维模型。
3D轮廓扫描仪的工作原理如下:1. 光源与投影:常用的光源为激光束或光栅,它们可以提供高亮度的光线来照射物体。
光线通过透镜或光学系统进行聚焦,形成一个射线或投影线。
2. 光线与物体的交互:光线照射到物体表面后,会根据物体的形状、材料和表面特性发生反射、散射、吸收等现象。
这些光线经过反射或散射后,在接收器上形成一个光斑或光栅。
3. 接收器的工作:接收器是一种能够感知光线并转换成电信号的器件,常用的接收器有CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)。
4. 光斑或光栅的获取:接收器会将从物体表面反射或散射回来的光线接收,并转换成电信号。
接收到的光信号包含了物体表面形状和纹理等信息。
5. 数据处理与重建:通过计算机处理和重建算法,将接收到的光信号转换成以点云形式表示的三维模型。
这些点云数据包含了物体表面的坐标和颜色等信息。
3D轮廓扫描仪的应用非常广泛。
在工业设计中,它可以用来生成三维模型,进行产品设计、模具制造和逆向工程等。
在文化遗产保护领域,它被用于数字化保存和修复文物。
在医学领域,它可以用来生成人体模型,进行手术模拟和医疗定制等。
而在虚拟现实和增强现实技术中,3D轮廓扫描仪也是不可或缺的设备。
然而,尽管3D轮廓扫描仪在很多领域有广泛的应用,但也存在一些限制和挑战。
首先,扫描过程可能受到光线、物体表面反射特性和遮挡等因素的影响,从而造成数据采集的不准确性。
其次,数据处理和重建算法对硬件性能和计算资源要求较高,因此需要较强的计算能力和算法优化。
此外,大型物体的扫描可能需要多个扫描仪的协同工作,增加了设备成本和操作复杂度。
最后,扫描仪本身的体积和重量也限制了其在某些场景下的应用。
轮廓仪测量原理
测量原理:
电动轮廓仪是通过仪器的触针与被测表面的滑移进行测量的,是接触测量。
其主要优点是可以直接量某些难以测量到的零件表面,如孔、槽等的表面粗糙度,又能直接按某种评定标准读数或是描绘出表面轮廓曲线的形状,且测量速度快、结果可靠、操作方便。
但是被测表面容易被触针划伤,为此应在保证可靠接触的前提下尽量减少测量压力。
1、功能特性:
可测量各种精密机械零件的素线形状,直线度、角度、凸度、对数曲线、槽深、槽宽等参数。
2、适用范围:
广泛应用于机械加工、电机、汽配、摩配、精密五金、精密工具、刀具、模具、光学元件等行业。
适用于科研院所、大专院校、计量机构和企业计量室、车间。
可测轴承、滚针、滚子、电机轴、曲轴、圆柱销、活塞销、活塞、气门、阀门、齿轮、油泵油嘴、液压件、气动件、纺机配件等。
3、主要优点:
传感器的触针由金刚石制成,针尖圆弧半径为2微米,在触针的后端镶有导块,形成一条相对于工件表面宏观起伏的测量的基准,使触针的位移仅相对于传感器壳体上下运动,所以导块能起到消除宏观几何形状误差和减小纹波度对表面粗糙度测量结果的影响。
传感器以铰链形式和驱动箱连接,能自由下落,从而保证导块始终与被测表面接触。
3D扫描的工作原理主要是通过使用3D扫描仪对物体进行照相测量,获取物体的三维信息,并重建出物体的三维模型。
3D扫描仪可以通过不同的技术来实现这一目标,如结构光扫描、激光扫描、三坐标测量等。
结构光扫描原理是利用一种结合结构光技术、相位测量技术、3D 视觉技术、复合三维非接触式测量技术。
通过投射光线在物体表面并观察其产生的变化,可以获取物体的三维信息。
激光扫描原理则是利用激光器发出激光并照射到物体表面,通过测量光斑的位置和角度来获取物体的三维信息。
三坐标测量机则是一种利用三个互相垂直的运动轴建立起的一个直角坐标系,测头的一切运动都在这个坐标系中进行,测头的运动轨迹由测球中心来表示。
测量时,把被测零件凡放在工作台上,测头与零件表面接触,三坐标测量机的检测系统可以随时给出测球中心点在坐标系中的精确位置。
当测球沿着工件的几何型面移动时,就可以精确地计算出被测工件的几何尺寸、现状和位置公差等。
光学3D表面轮廓仪助推超精密加工技术发展机械零件的表面加工质量不仅直接影响零件的使用性能,而且对产品的质量、可靠性及寿命也至关重要。
随着超精密加工技术的飞速发展,超精密加工表面的微观形貌测量已成为超精密加工领域中亟待解决的关键课题。
超精密加工表面极为光滑,表面粗糙度Ra值在几分之一纳米到十几纳米之间。
加工超光滑表面的材料主要有光学玻璃、有机玻璃、石英玻璃等光学材料,锗、硅等半导体材料及铜、铝等金属材料。
表面微观形貌测量的传统方法是机械触针法,该方法可通过触测直接获得被测表面某一截面的轮廓曲线,经计算机进行数据处理分析,可得到接近真实轮廓的各种表面特征参数。
虽然该类仪器具有较高分辨率及较大量程(如Talystep触针式轮廓仪分辨率可达0.1nm,测量范围可达100μm),但由于测量时尖锐的金刚石触针极易划伤被测样件的超光滑表面并引起测量误差,因此其在超精密表面测量中的应用受到一定限制。
随着科技发展,扫描隧道显微镜(STM)及其衍生物原子力显微镜(AFM)相继出现,使表面微观轮廓测量技术发生了革命性变革。
该类仪器不但具有可达原子尺度的超高分辨率(横向分辨率0.1nm,垂直分辨率0.01nm),还能获得关于被测表面原子结构及功能特性的大量信息。
但STM和AFM对测量环境要求苛刻,需要采取良好的隔振措施和配备复杂的传感器运动伺服控制系统,且仪器价格昂贵,测量范围也较小,在实际应用中还需解决精密隔振技术、压电陶瓷的控制等技术难题。
自1960年激光器问世以来,由于激光具有单色性、相干性和方向性好、光强度高等特点,很快成为精密光学测量的理想光源,各种类型的激光干涉仪均以真空中的激光波长作为长度测量基准。
主要采用激光作为测量光源的表面微观形貌光学测量方法不仅能实现高精度的快速非接触测量,而且系统结构简单、成本低,因此在超精密表面非接触测量领域得到了迅速发展。
目前较为成熟的光学测量方法就是仪白光干涉为原理,结合精密Z向扫描模块、3D 建模算法的光学3D表面轮廓仪,也叫白光干涉仪。
轮廓仪使用说明书编制:审核:目录第一章轮廓仪的测量原理及结构、功能 (3)1.1轮廓仪的测量原理 (3)1.2轮廓仪整体结构 (4)1.2.1主机配置 (4)1.2.1.1测量部分 (4)1.2.1.1.1操作面板 (7)1.2.1.2数据处理部分 (8)1.2.2计算机系统 (8)第二章轮廓仪的开机和关机 (9)2.1开机过程 (9)2.2关机过程 (10)第三章轮廓仪的测针校验 (10)3.1 测针校验原理 (10)3.2 测针校验过程 (12)3.2.1校验开始前应该注意三个问题 (12)3.2.2校验步骤 (13)3.2.3校验结果判定 (15)第四章轮廓仪常见零件的测量及分析 (15)4.1齿形类零件的测量 (15)4.1.1.水泵皮带轮和发电机4.1.2曲轴皮带轮 (16)4.2气环 (18)4.3气门 (20)第五章轮廓仪的测量报告 (21)第六章轮廓仪的警告及注意事项 (22)6.1警告 (22)6.2注意 (23)第七章轮廓仪的点检、保养及维修 (24)7.1点检、保养 (24)7.2维修 (25)第八章轮廓仪常见故障及解决方案8.1设备运行及测量过程中常见的问题及解决方法 (26)第一章轮廓仪的测量原理及结构、功能1.1轮廓仪的测量原理轮廓仪又叫轮廓测量仪,轮廓测量仪是测量各种机械零件素线形状和截面轮廓形状的精密设备。
它的工作原理是轮廓仪测量工件表面轮廓时,将传感器放在工件被测表面上,由仪器内部的驱动机构带动传感器沿被测表面做等速滑行,传感器通过内置的锐利触针感受被测表面的几何形状变化,此时工件被测表面的几何形状变化引起触针产生位移,该位移使传感器电感线圈的电感量发生变化,从而在相敏整流器的输出端产生与被测表面轮廓成比例的模拟信号,该信号经过放大及电平转换为数字信号进入数据采集系统。
计算机对原始轮廓进行分析和计算。
表面轮廓测量仪属于一种形状测量仪,采用的是触针法。
1.2轮廓仪整体结构包括主机配置和窗口程序。
3d扫描仪工作原理3D扫描仪是一种先进的数字化仪器,可以实现物体表面的高精度、快速扫描。
它主要通过激光或光栅等技术实现物体的三维建模,为制造、设计、医疗等领域提供了强有力的支持。
本文将介绍3D扫描仪的工作原理,以及它的具体操作步骤。
一、3D扫描仪的工作原理3D扫描仪的工作原理可以简单概括为:利用光线或激光对物体表面进行扫描,记录下每个点的坐标和颜色等信息,然后根据这些信息生成一个三维模型。
具体来说,3D扫描仪的工作原理有以下几个步骤:(1)采集数据:3D扫描仪通过发射光线或激光,将其照射到物体表面,测量每个点表面的坐标和颜色信息。
(2)数据处理:将采集的数据传输给扫描仪内部的处理器进行图像处理,将数据转化为三维坐标信息,并根据颜色数据生成纹理信息。
(3)生成3D模型:将处理后的数据导入到3D建模软件中,根据每个点的坐标和颜色信息,生成一个逼真的三维模型。
二、3D扫描仪的具体操作步骤根据不同的3D扫描仪品牌和型号,具体的操作流程会有所不同。
这里我们以爱普生3D扫描仪为例,介绍一下操作步骤:(1)安装和连接:将3D扫描仪与电脑连接,安装相应的驱动程序和软件。
(2)设置扫描参数:打开扫描软件,设置扫描参数,包括扫描范围、扫描速度、精度等。
(3)物体准备:将需要扫描的物体放置在扫描区域内,并进行对齐、调整姿态等操作。
(4)开始扫描:点击扫描按钮开始扫描,3D扫描仪会对物体进行扫描,并记录下每个点表面的坐标和颜色信息。
(5)数据处理和编辑:将扫描得到的数据传输给处理软件,将其转化为三维坐标和纹理信息,并进行编辑和优化。
(6)生成3D模型:将处理后的数据导入到3D建模软件中,生成逼真的三维模型。
总的来说,3D扫描仪的工作原理基于激光或光栅等技术,能够实现高精度的物体扫描和三维模型生成。
通过上述操作步骤,我们可以轻松地完成3D扫描的过程,为各种领域的创新和发展提供更高效、更精确的支持。
电动轮廓仪的用途及工作原理一、电动轮廓仪的用途不论何种型号和规格的电动轮廓仪都可用来测量平面、轴、孔和圆弧等各种外形的工件表面的粗糙度。
电动轮廓仪所测粗糙度参数Ra值范围为0.04~10um。
对于大于10um的表面,因为它的起伏不平较大,转换成的电信号也较大,将导致仪器放大器的失真,从而产生较大的测量误差,因此不宜采纳电动轮廓仪举行测量。
对于小于0.04um的表面起伏,因为传感器的触针不能做得太尖,所以保证不了与被测表面轮廓的谷底所有真正接触,从而也会造成较大的测量误差,故也不宜采纳轮廓仪。
由于电动轮廓仪采纳的是接触测量,所以应保证一定的测力。
这对软材料表面简单引起划伤,故也不宜采纳电动轮廓仪测量软材料的表面粗糙度。
二、电动轮廓仪的工作原理电动轮廓仪通过传感器将被测表面的微观起伏转换成电信号,再经放大、运算处理后由积分表指示出Ra值,或将信号送入记录仪画出轮廓图形。
图4.2.4为其原理方框图。
图4.2.4 工作原理方框图电动轮廓仪普通包括传感器、测量电路、显示或记录装置三个基本部分。
传感器的测端是一根很尖的触针,将它垂直于被测表面放置。
驱动箱拖动传感器使触针沿垂直于表面加工痕迹方向匀速慢滑,使触针上下运动。
传感器触针的位移量变换成电信号,经测微放大电路放大后送入信号分别及Ra运算电路。
信号分别电路普通包括前置放大器、噪音滤波器、波度滤除器;Ra运算电路包括求中线电路、取肯定值电路、积分电路。
其中波度滤除器能滤掉表面波度和外形误差所产生的低频电信号而保留表征表面粗糙度的电信号,按照定义为工件表面向轮廓中线的轮廓曲线函数),凡是大于ι的变幻量已经不属于粗糙度的范畴,理应去掉。
滤波后的信号必需经过求中线电路才干得到与f(x)相应的电信号,再经过取肯定值电路取出信号的肯定值,送入积分电路。
积分电路则在规定的长度内按定义将信号积分,再由电表将Ra值指示出来。
积分电路也不单设,而由积分表挺直完成积分。
经测微放大器放大的信号也可送入功率放大器举行放大,然后送入记录仪将被测表面轮廓的放大图形画在记录纸上。
廓仪Sensofar S系列感受3D最新的S系列3D光学轮廓仪,为您展现全新的3D立体形貌全新设计的3D光学轮廓仪 S neox颠覆传统, 将共聚焦、干涉和多焦面叠加技术融合于一身,测量头内无运动部件。
S neox,将三种技术都做到最好2融合3种测量方式于一体D体验共聚焦技术可以用来测量各类样品表面的形貌。
它比光学显微镜有更高的横向分辨率,可达0.09µm。
利用它可实现临界尺寸的测量。
当用150倍、0.95数值孔径的镜头时,共聚焦在光滑表面测量斜率达70°(粗糙表面达86°)。
专利的共聚焦算法保证Z轴测量重复性在纳米范畴。
相位差干涉 相位差干涉是一种亚纳米级精度的用于测量光滑表面高度形貌的技术。
它的优势在于任何放大倍数都可以保证亚纳米级的纵向分辨率。
使用2.5倍的镜头就能实现超高纵向分辨率的大视场测量。
白光干涉白光干涉是一种纳米级测量精度的用于测量各种表面高度形貌的技术。
它的优势在于任何放大倍数都可以保证纳米级的纵向分辨率。
多焦面叠加技术是用来测量非常粗糙的表面形貌。
根据Sensofar在共聚焦和干涉技术融合应用方面的丰富经验,特别设计了此功能来补足低倍共聚焦测量的需要。
该技术的最大亮点是快速 (mm/s)、扫描范围大和支援斜率大(最大86°)。
此功能对工件和模具测量特别有用。
干涉多焦面叠加共聚焦无运动部件的共聚焦380160240320400480560400425450475500525550575600625650675700725Dichroic Blue FilterBlue LED Green LED Red LEDDichroic Green FilterDichroic Red FilterWhite LED多波长的LED 光源红色.绿色.蓝色.白色S neox 有4个独立的LED 光源红色(630nm), 绿色(530nm), 蓝色(460nm) 和白色,可以满足各种应用的需要。
3d轮廓测量仪原理
3D轮廓测量仪的原理是通过光学或激光技术来捕捉物体表面的三维轮廓信息。
具体原理如下:
1. 光学原理:通过光学传感器或相机,测量物体表面上不同点的距离,并将这些距离信息转化为三维坐标点,从而重构物体的三维轮廓。
2. 激光原理:使用激光束照射到物体表面,利用光电传感器接收反射光,并测量激光光程差,即激光束从发射到接收的时间差,从而计算出物体表面上不同点的距离,最终得到物体的三维轮廓。
3. 结构光原理:通过投射结构光,即由主投影仪产生的特定图案,如條纹或网格,通过光电传感器接收物体表面反射回的结构光,并根据结构光的形变来计算得到物体表面上各点的三维坐标。
3D轮廓测量仪可以利用以上原理来非接触地测量物体的形状和尺寸,并用于工业制造、产品设计、质量检测和逆向工程等领域。
3d轮廓仪原理
3D轮廓仪是一种常用于非接触式检测的三维形貌测量设备,原理是基于光线三角测量原理和相位移位原理。
它主要由投影仪,相机和相应的软件组成。
其中,投影仪会将白光分成多束并投射在待测物体表面上,形成一个具有编码条纹的图像。
而相机则用于收集被测物体上形成的这些编码条纹。
当物体有微小的形变或移动时,编码条纹发生相对位移。
根据相位移位原理,从编码条纹的位移量可以计算出物体表面像素点处的高度信息,进而得到待测物体的三维表面数据。
这样,通过全方位拍摄待测物体,就可以获得该物体在三维空间中的完整轮廓,并生成对应的三维模型。
特别需要注意的是,由于编码条纹的形成是基于光学原理,因此在非黑暗环境下可能会受到环境光和反射光的影响,导致测量误差或数据失真。
因此,在使用3D轮廓仪时需要尽可能地避免这些外界光干扰。